feuille exercices de robotique (2) -...
TRANSCRIPT
Feuille Exercices de Robotique (2)
Master M2 - SdI SAR/SIR
1 Exercice 1
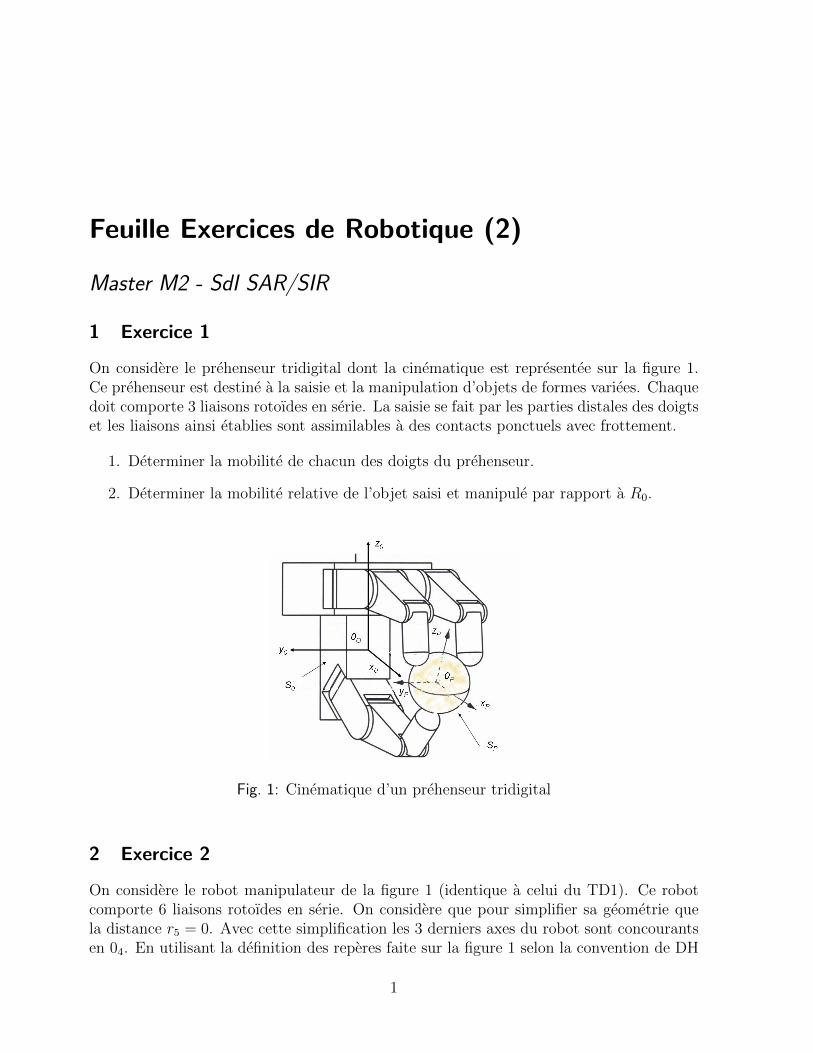
On considere le prehenseur tridigital dont la cinematique est representee sur la figure 1.Ce prehenseur est destine a la saisie et la manipulation d’objets de formes variees. Chaquedoit comporte 3 liaisons rotoıdes en serie. La saisie se fait par les parties distales des doigtset les liaisons ainsi etablies sont assimilables a des contacts ponctuels avec frottement.
1. Determiner la mobilite de chacun des doigts du prehenseur.
2. Determiner la mobilite relative de l’objet saisi et manipule par rapport a R0.
Fig. 1: Cinematique d’un prehenseur tridigital
2 Exercice 2
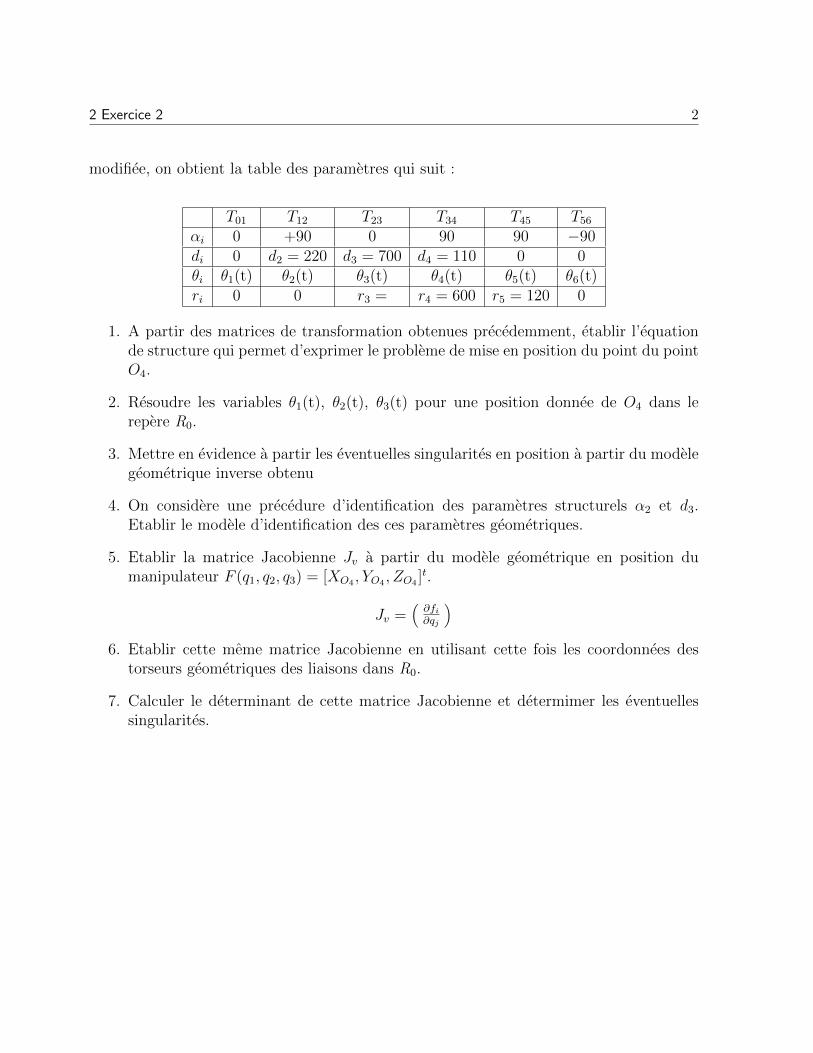
On considere le robot manipulateur de la figure 1 (identique a celui du TD1). Ce robotcomporte 6 liaisons rotoıdes en serie. On considere que pour simplifier sa geometrie quela distance r5 = 0. Avec cette simplification les 3 derniers axes du robot sont concourantsen 04. En utilisant la definition des reperes faite sur la figure 1 selon la convention de DH
1
2 Exercice 2 2
modifiee, on obtient la table des parametres qui suit :
T01 T12 T23 T34 T45 T56αi 0 +90 0 90 90 −90di 0 d2 = 220 d3 = 700 d4 = 110 0 0θi θ1(t) θ2(t) θ3(t) θ4(t) θ5(t) θ6(t)ri 0 0 r3 = r4 = 600 r5 = 120 0
1. A partir des matrices de transformation obtenues precedemment, etablir l’equationde structure qui permet d’exprimer le probleme de mise en position du point du pointO4.
2. Resoudre les variables θ1(t), θ2(t), θ3(t) pour une position donnee de O4 dans lerepere R0.
3. Mettre en evidence a partir les eventuelles singularites en position a partir du modelegeometrique inverse obtenu
4. On considere une precedure d’identification des parametres structurels α2 et d3.Etablir le modele d’identification des ces parametres geometriques.
5. Etablir la matrice Jacobienne Jv a partir du modele geometrique en position dumanipulateur F (q1, q2, q3) = [XO4 , YO4 , ZO4 ]
t.
Jv =(
∂fi∂qj
)6. Etablir cette meme matrice Jacobienne en utilisant cette fois les coordonnees des
torseurs geometriques des liaisons dans R0.
7. Calculer le determinant de cette matrice Jacobienne et determimer les eventuellessingularites.
2 Exercice 2 3
Fig. 2: Manipulateur S10 a 6 liaisons rotoıdes
3 Exercice 3 4
3 Exercice 3
On considere le manipulateur a 6 degres de liberte UL de Robosoft represente sur lafigure 2.
1. Mettre en place les reperes selon la convention DH modifiee
2. Definir les parametres de DH
3. Resoudre le probleme geometrique inverse pour l’ensemble des 6 parametres articu-laires.
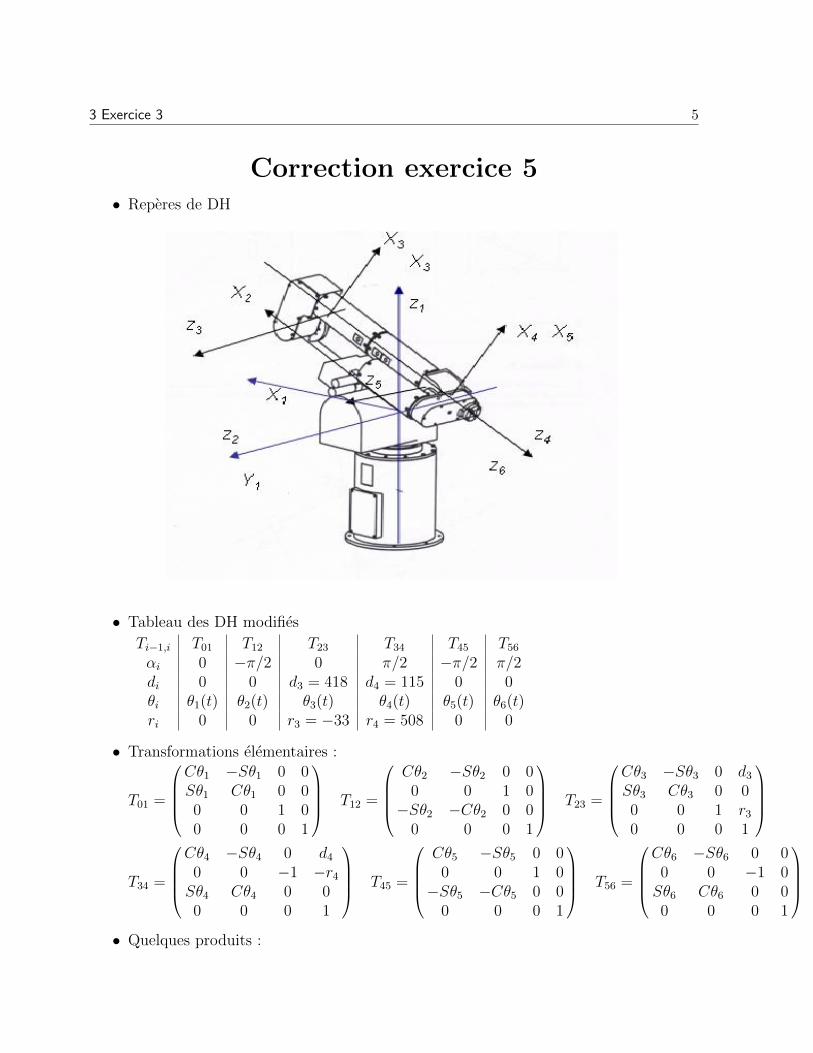
Fig. 3: Manipulateur UL Robosoft
3 Exercice 3 5
Correction exercice 5• Reperes de DH
• Tableau des DH modifies
Ti−1,i T01 T12 T23 T34 T45 T56αi 0 −π/2 0 π/2 −π/2 π/2di 0 0 d3 = 418 d4 = 115 0 0θi θ1(t) θ2(t) θ3(t) θ4(t) θ5(t) θ6(t)ri 0 0 r3 = −33 r4 = 508 0 0
• Transformations elementaires :
T01 =
Cθ1 −Sθ1 0 0Sθ1 Cθ1 0 00 0 1 00 0 0 1
T12 =
Cθ2 −Sθ2 0 0
0 0 1 0−Sθ2 −Cθ2 0 0
0 0 0 1
T23 =
Cθ3 −Sθ3 0 d3Sθ3 Cθ3 0 00 0 1 r30 0 0 1
T34 =
Cθ4 −Sθ4 0 d4
0 0 −1 −r4Sθ4 Cθ4 0 00 0 0 1
T45 =
Cθ5 −Sθ5 0 0
0 0 1 0−Sθ5 −Cθ5 0 0
0 0 0 1
T56 =
Cθ6 −Sθ6 0 0
0 0 −1 0Sθ6 Cθ6 0 00 0 0 1
• Quelques produits :

3 Exercice 3 6
T13 =
Cθ23 −Sθ23 0 d3Cθ2
0 0 1 r3−Sθ23 −Cθ23 0 −d3Sθ2
0 0 0 1
T02 =
Cθ1Cθ2 −Cθ1Sθ2 −Sθ1 0Sθ1Cθ2 −Sθ1Sθ2 Cθ1 0−Sθ2 +Cθ2 0 0
0 0 0 1
T03 =
Cθ1Cθ23 −Cθ1Sθ23 −Sθ1 d3Cθ1Cθ2 − r3Sθ1Sθ1Cθ23 −Sθ1Sθ23 Cθ1 d3Sθ1Cθ2 + r3Cθ1−Sθ23 −Cθ23 0 −d3Sθ2
0 0 0 1
T04
0001
=
d4Cθ1Cθ23 + r4Cθ1Sθ23 + d3Cθ1Cθ2 − r3Sθ1d4Sθ1Cθ23 + r4Sθ1Sθ23 + d3Sθ1Cθ2 + r3Cθ1
−d4Sθ23 + r4Cθ23 − d3Sθ21
T14
0001
=
d4Cθ23 + r4Sθ23 + d3Cθ2
r3−d4Sθ23 + r4Cθ23 − d3Sθ2
1
• Resolution du PGI
d04(θ1, θ2, θ3) =
XP
YPZP
− R0h
00L
=
X04
Y04Z04
T−101
X04
Y04Z04
1
= T14
0001
Cθ1 Sθ1 0 0−Sθ1 Cθ1 0 0
0 0 1 00 0 0 1
X04
Y04Z04
1
=
d4Cθ23 + r4Sθ23 + d3Cθ2
r3−d4Sθ23 + r4Cθ23 − d3Sθ2
1
On resoud θ1 a partir de l’equation :
−Sθ1X04 + Cθ1Y04 = r3

3 Exercice 3 7
Resolution de θ2 :
T−102
X04
Y04Z04
1
= T24
0001
Cθ1Cθ2 Sθ1Cθ2 −Sθ2 0−Cθ1Sθ2 −Sθ1Sθ2 Cθ2 0−Sθ1 +Cθ1 0 0
0 0 0 1
X04
Y04Z04
1
=
d4Cθ3 + r4Sθ3 + d3d4Sθ3 − r4Cθ3
r31
On resoud θ2 et θ3 a partir des equations :
Cθ2(X04Cθ1 + Y04Sθ1) − Sθ2Z04 = d4Cθ3 + r4Sθ3 + d3
−Sθ2(X04Cθ1 + Y04Sθ1) + Cθ2Z04 = d4Sθ3 − r4Cθ3
La resolution des autres variables se fait a partir de :
R36 = R30
sx nx axsy ny aysz nz az
=
Fx Gx Hx
Fy Gy Hy
Fz Gz Hz
avec :
R03 =
Cθ1Cθ23 −Cθ1Sθ23 −Sθ1Sθ1Cθ23 −Sθ1Sθ23 Cθ1−Sθ23 −Cθ23 0
Resolution de θ4 :
Rt34
Fx Gx Hx
Fy Gy Hy
Fz Gz Hz
= R46
Cθ4 0 Sθ4−Sθ4 0 Cθ4
0 −1 0
Fx Gx Hx
Fy Gy Hy
Fz Gz Hz
=
Cθ5Cθ6 −Cθ5Sθ6 Sθ5Sθ6 Cθ6 0
−Sθ5Cθ6 Sθ5Sθ6 Cθ5
On obtient l’equations :
−Sθ4Hx + Cθ4Hz = 0
a l’aide de laquelle on peut resoudre θ4
Les equations :Cθ4Hx + Sθ4Hz = Sθ5
−Hy = Cθ5
permettent de resoudre θ5

3 Exercice 3 8
Il existe une indetermination si Hy = 0.
Les equations :−Sθ4Fx + Cθ4Fz = Sθ6
−Sθ4Gx + Cθ4Gz = Cθ6
permettent de resoudre θ6