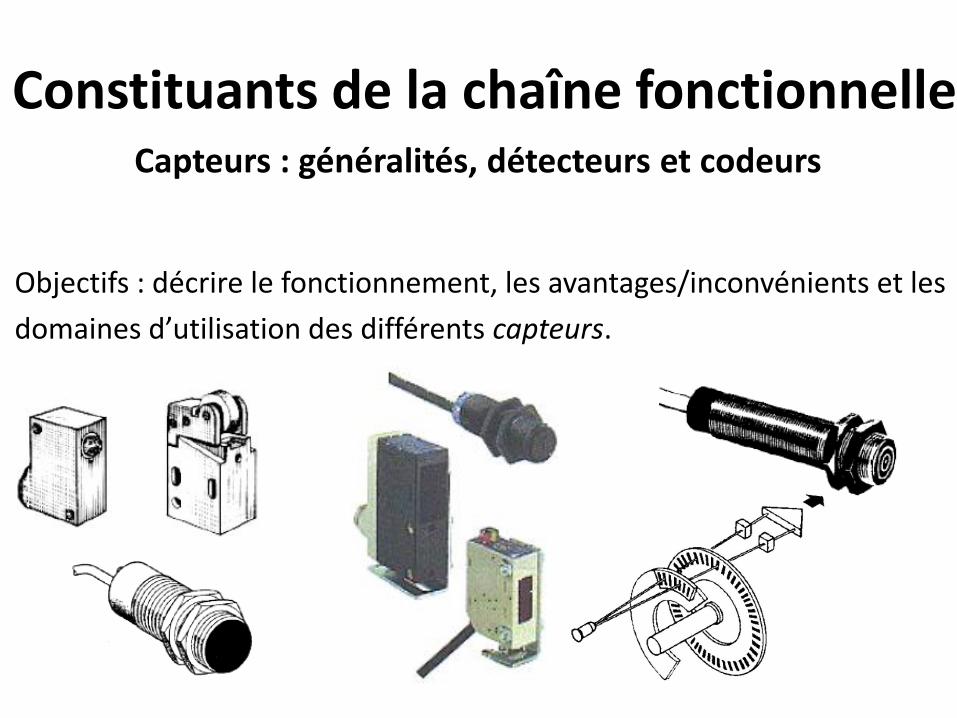
Constituants de la chaîne fonctionnelle Capteurs : généralités, détecteurs et codeurs
Objectifs : décrire le fonctionnement, les avantages/inconvénients et les
domaines d’utilisation des différents capteurs.
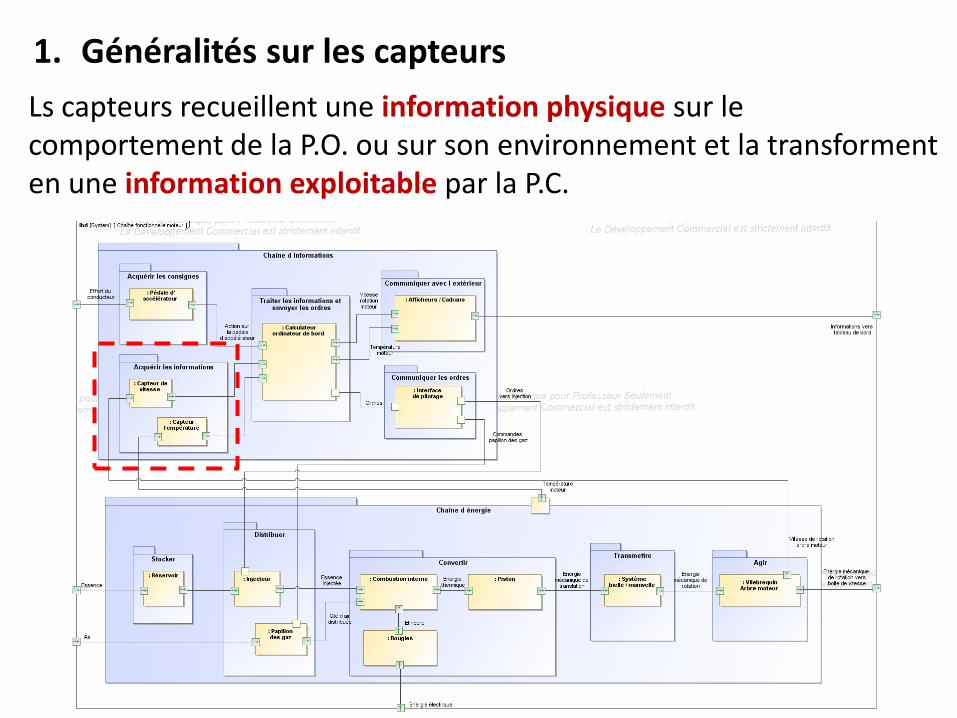
1. Généralités sur les capteurs
Ls capteurs recueillent une information physique sur le comportement de la P.O. ou sur son environnement et la transforment en une information exploitable par la P.C.
1. Généralités sur les capteurs
Exemples de grandeurs physiques à contrôler :
force pression position vitesse
température luminosité
Pour cela on va mesurer par exemple une :
variation de résistance,
variation d’induction magnétique,
variation capacitive,
variation de fréquence…
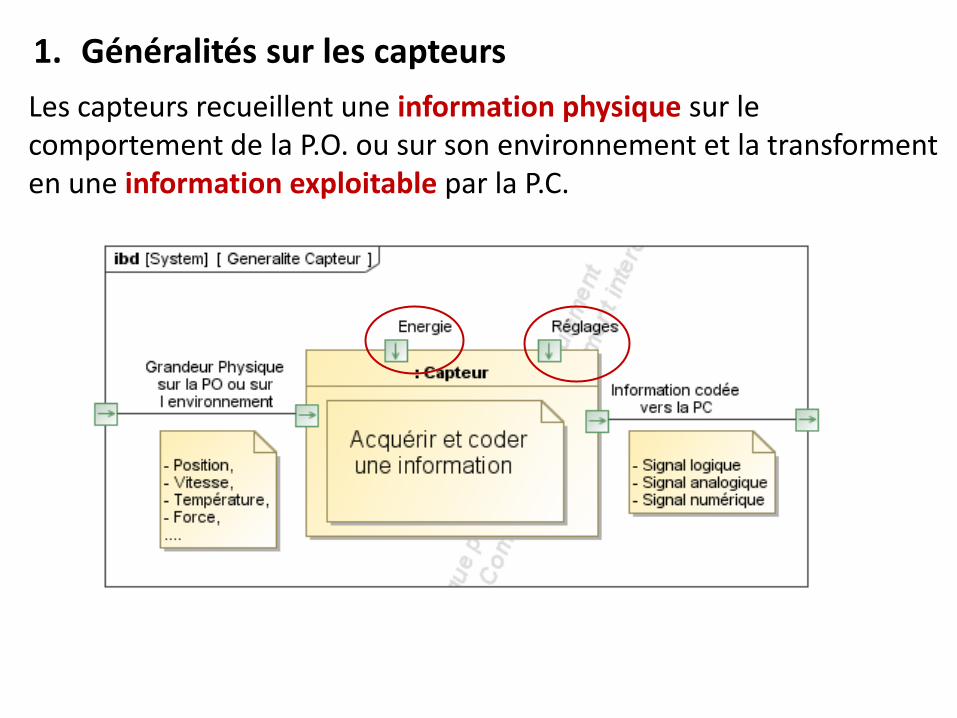
1. Généralités sur les capteurs
Les capteurs recueillent une information physique sur le comportement de la P.O. ou sur son environnement et la transforment en une information exploitable par la P.C.
1. Généralités sur les capteurs
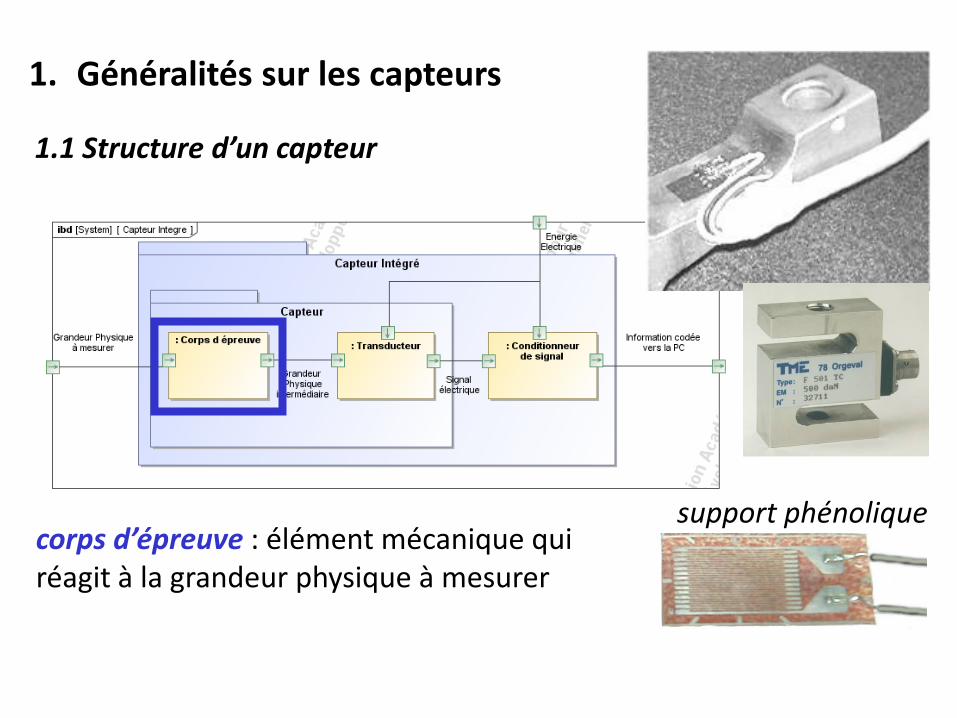
1.1 Structure d’un capteur
corps d’épreuve : élément mécanique qui réagit à la grandeur physique à mesurer
support phénolique
1. Généralités sur les capteurs
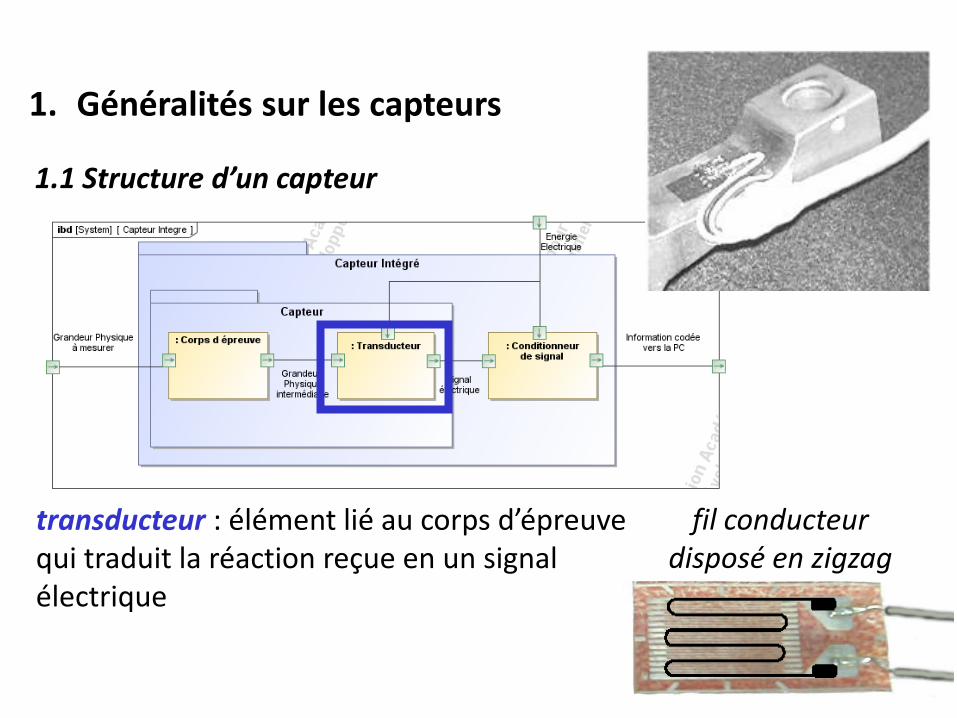
1.1 Structure d’un capteur
transducteur : élément lié au corps d’épreuve qui traduit la réaction reçue en un signal électrique
fil conducteur disposé en zigzag
1. Généralités sur les capteurs
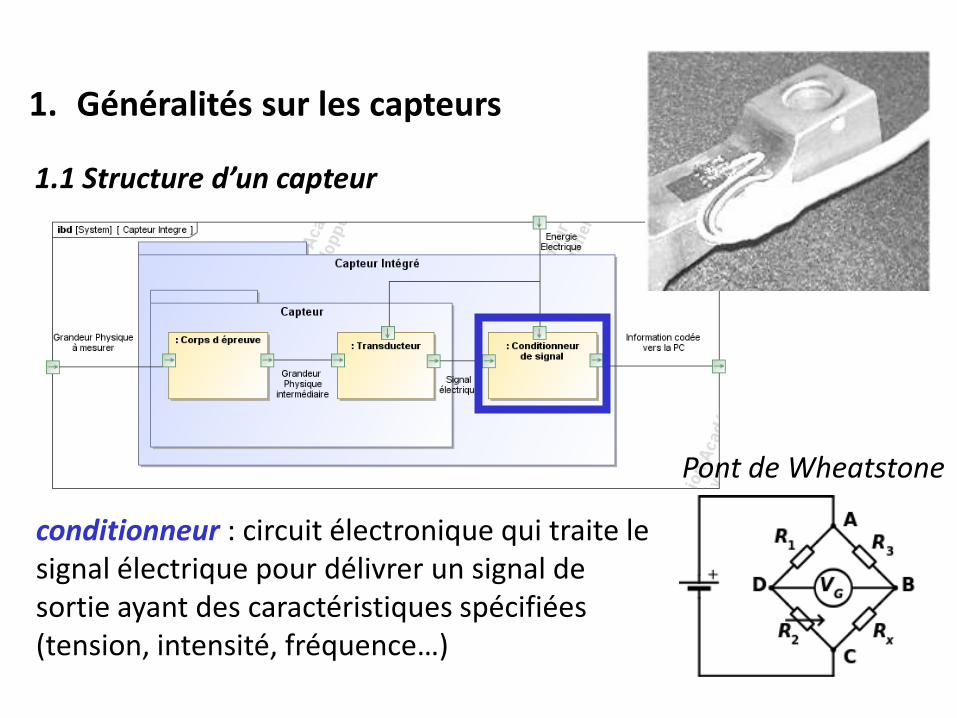
1.1 Structure d’un capteur
conditionneur : circuit électronique qui traite le signal électrique pour délivrer un signal de sortie ayant des caractéristiques spécifiées (tension, intensité, fréquence…)
Pont de Wheatstone
1. Généralités sur les capteurs
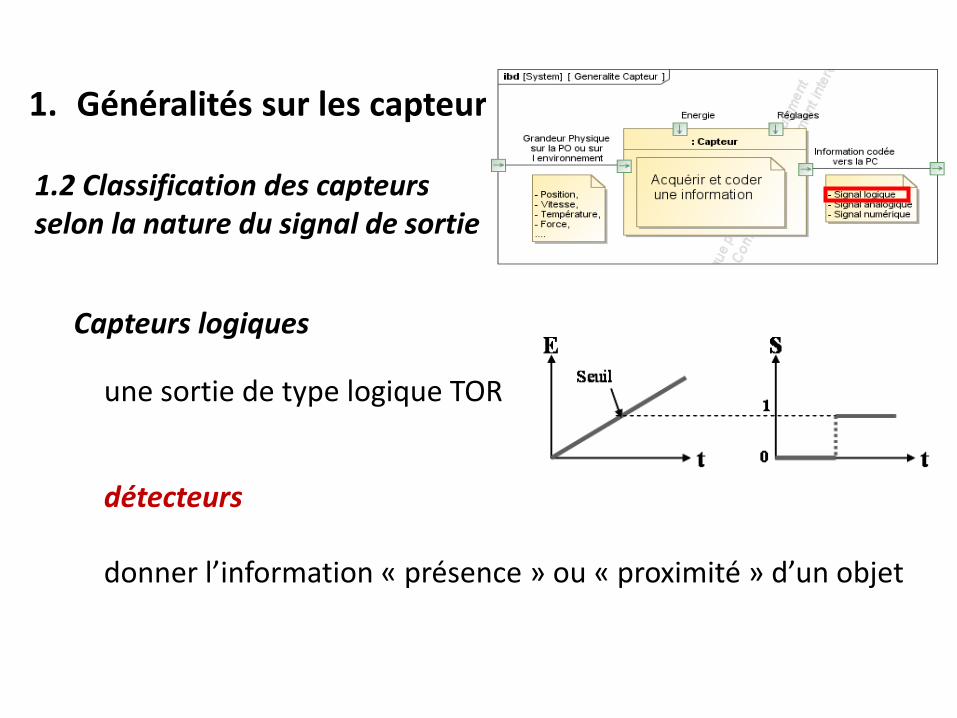
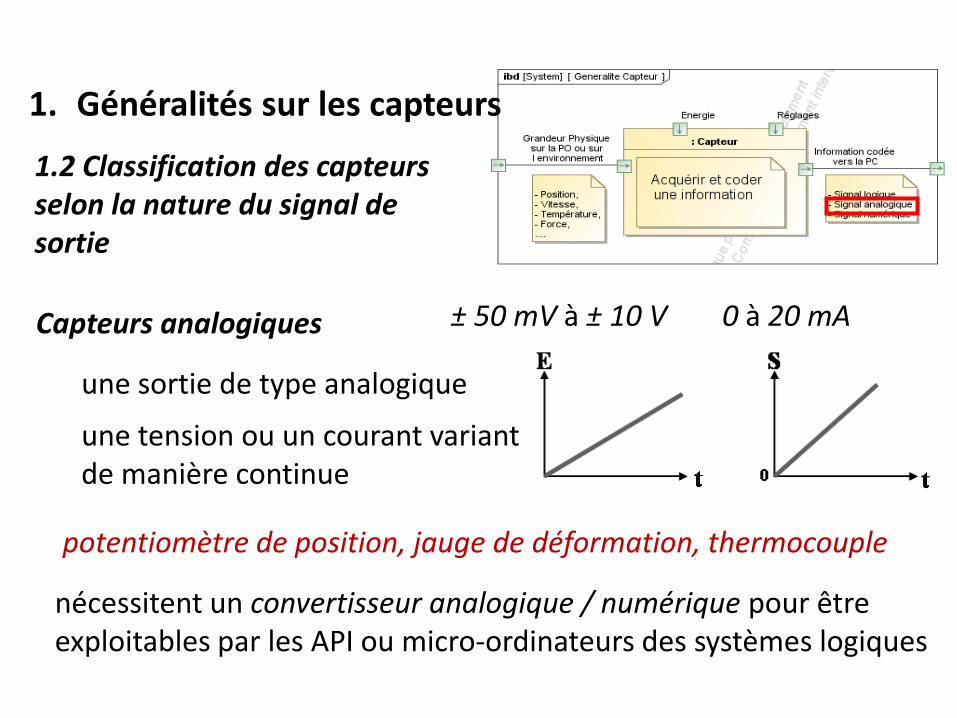
1.2 Classification des capteurs selon la nature du signal de sortie
Capteurs logiques
une sortie de type logique TOR
détecteurs
donner l’information « présence » ou « proximité » d’un objet
1. Généralités sur les capteurs
1.2 Classification des capteurs selon la nature du signal de sortie
Capteurs analogiques
une sortie de type analogique
potentiomètre de position, jauge de déformation, thermocouple
nécessitent un convertisseur analogique / numérique pour être exploitables par les API ou micro-ordinateurs des systèmes logiques
une tension ou un courant variant de manière continue
± 50 mV à ± 10 V 0 à 20 mA
1. Généralités sur les capteurs
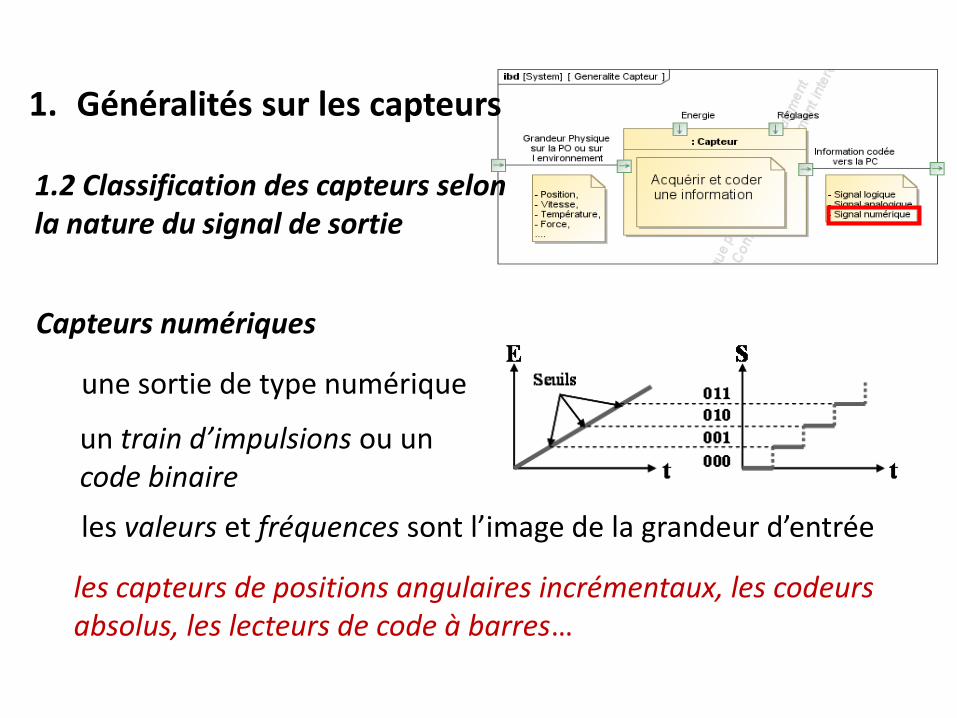
1.2 Classification des capteurs selon la nature du signal de sortie
Capteurs numériques
une sortie de type numérique
les valeurs et fréquences sont l’image de la grandeur d’entrée
les capteurs de positions angulaires incrémentaux, les codeurs absolus, les lecteurs de code à barres…
un train d’impulsions ou un code binaire
1. Généralités sur les capteurs
1.3 Caractéristiques d’un capteur
Etendue des mesures
différence entre les valeurs maximale et minimale perceptibles par le capteur de la grandeur à mesurer.
Résolution
plus petite variation de la grandeur à mesurer que le capteur peut déceler.
Sensibilité
variation du signal de sortie pour une variation de la grandeur d’entrée ; cette caractéristique correspond à la dérivée de la fonction de transfert S = f(E).
1. Généralités sur les capteurs
1.3 Caractéristiques d’un capteur
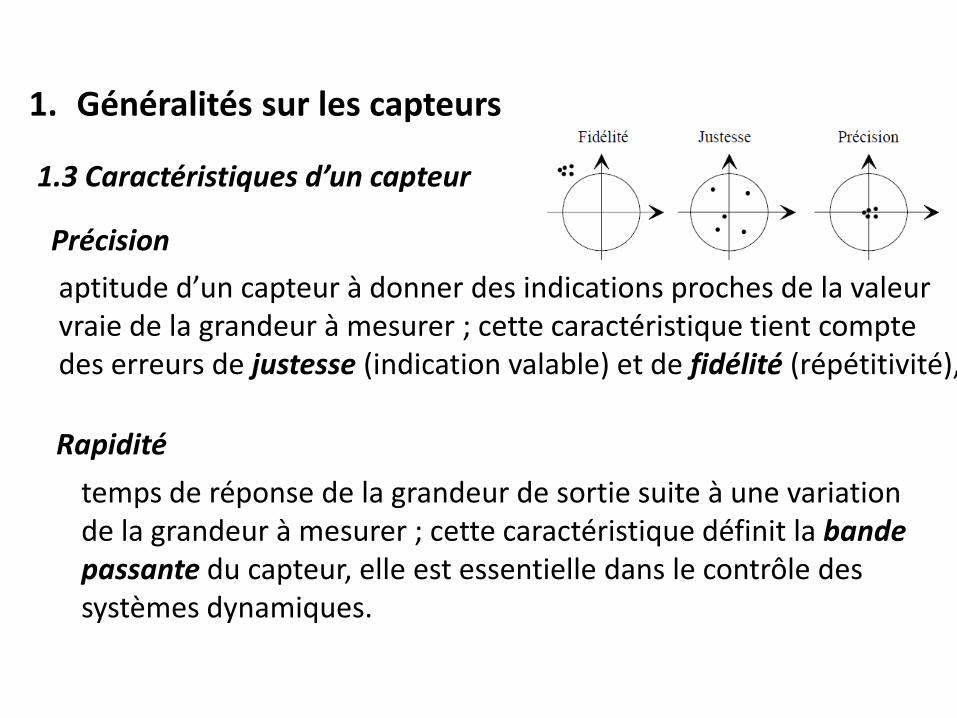
Précision
aptitude d’un capteur à donner des indications proches de la valeur vraie de la grandeur à mesurer ; cette caractéristique tient compte des erreurs de justesse (indication valable) et de fidélité (répétitivité),
Rapidité
temps de réponse de la grandeur de sortie suite à une variation de la grandeur à mesurer ; cette caractéristique définit la bande passante du capteur, elle est essentielle dans le contrôle des systèmes dynamiques.
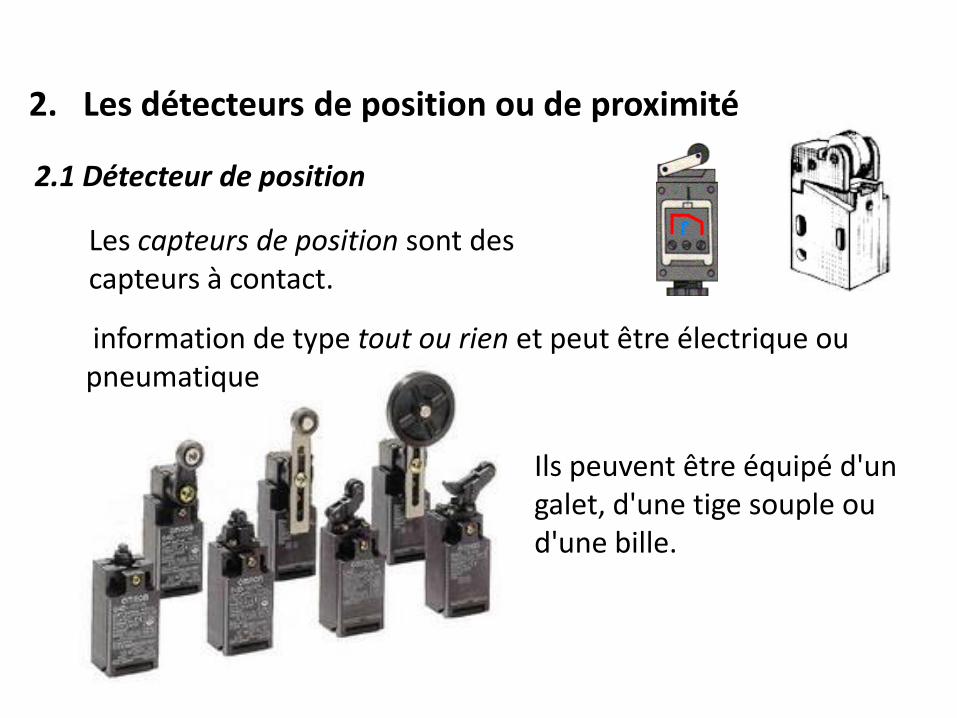
2. Les détecteurs de position ou de proximité
2.1 Détecteur de position
Les capteurs de position sont des capteurs à contact.
Ils peuvent être équipé d'un galet, d'une tige souple ou d'une bille.
information de type tout ou rien et peut être électrique ou pneumatique
2. Les détecteurs de position ou de proximité
2.1 Détecteur de position
Avantages
Inconvénients
détection de tout objet possible,
fiabilité élevée.
contact nécessaire avec l’objet,
encombrement.
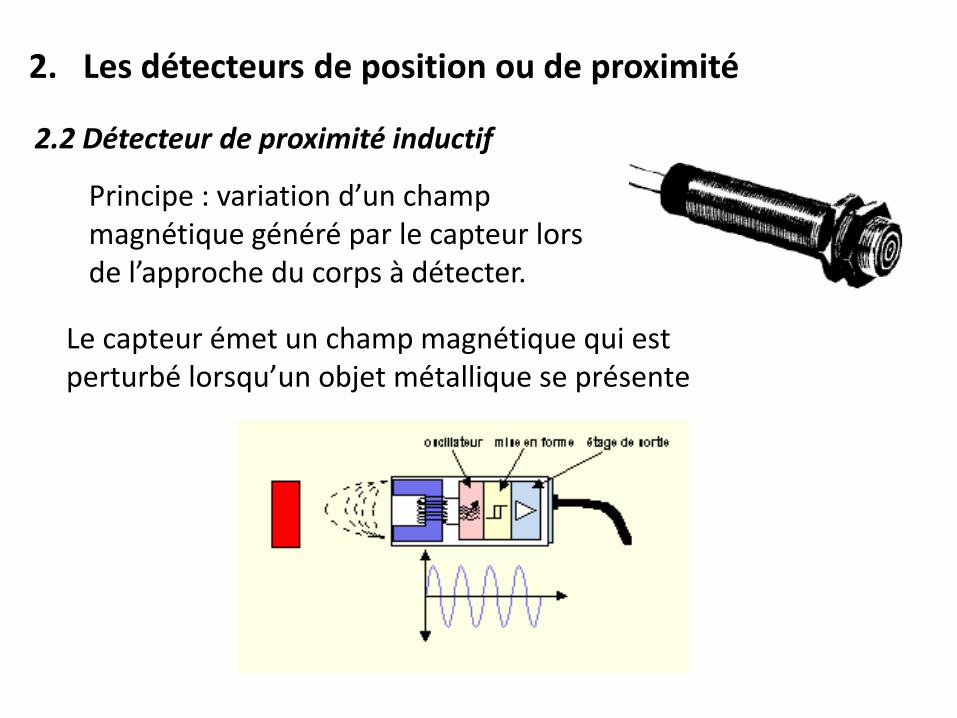
2. Les détecteurs de position ou de proximité
2.2 Détecteur de proximité inductif
Principe : variation d’un champ magnétique généré par le capteur lors de l’approche du corps à détecter.
Le capteur émet un champ magnétique qui est perturbé lorsqu’un objet métallique se présente
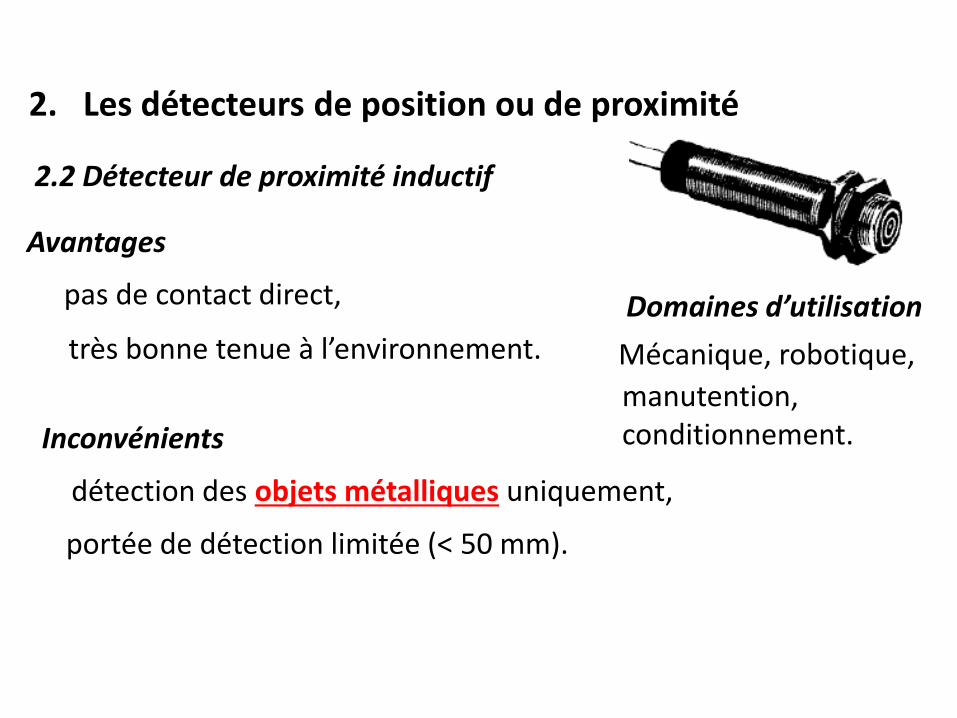
2. Les détecteurs de position ou de proximité
2.2 Détecteur de proximité inductif
Avantages
Inconvénients
pas de contact direct,
très bonne tenue à l’environnement.
détection des objets métalliques uniquement,
portée de détection limitée (< 50 mm).
Domaines d’utilisation
Mécanique, robotique,
manutention, conditionnement.
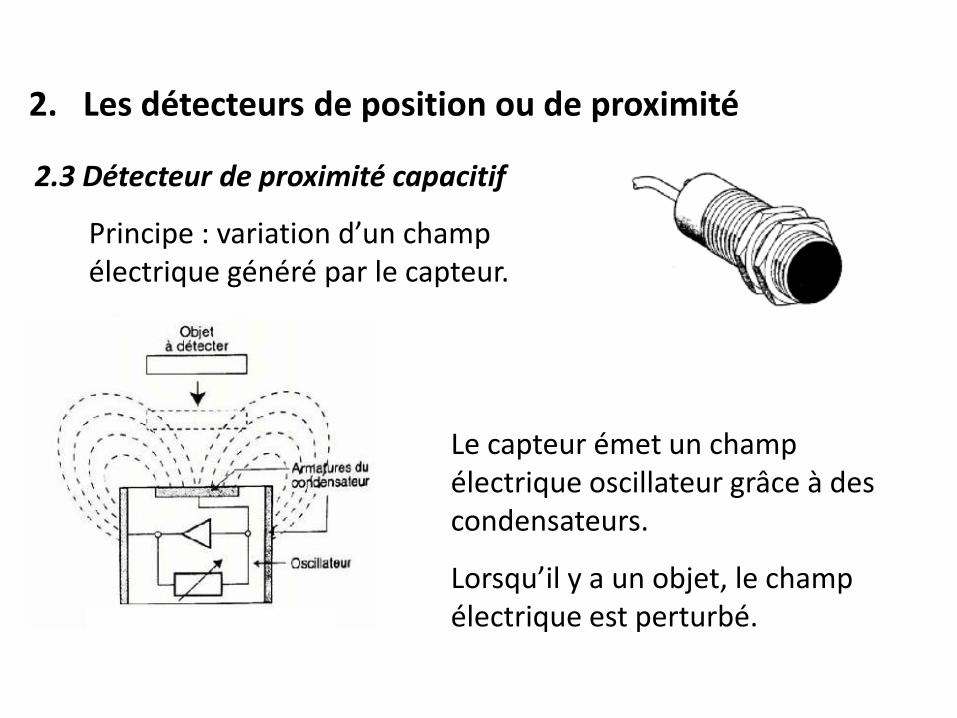
2. Les détecteurs de position ou de proximité
2.3 Détecteur de proximité capacitif
Principe : variation d’un champ électrique généré par le capteur.
Le capteur émet un champ électrique oscillateur grâce à des condensateurs.
Lorsqu’il y a un objet, le champ électrique est perturbé.
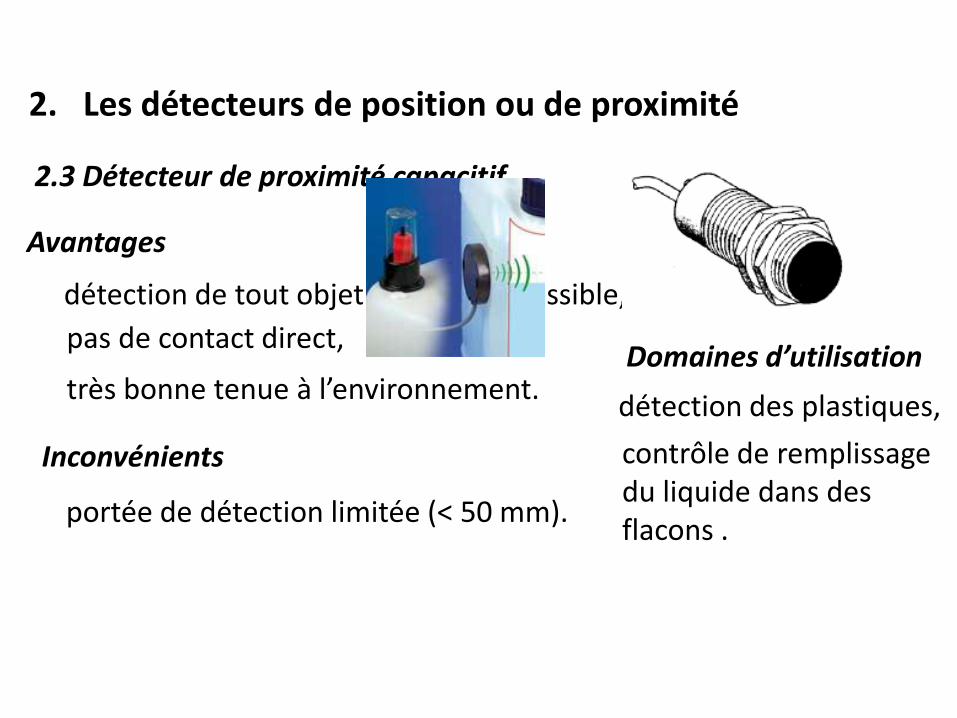
2. Les détecteurs de position ou de proximité
2.3 Détecteur de proximité capacitif
Avantages
Inconvénients
détection de tout objet et matière possible,
pas de contact direct,
très bonne tenue à l’environnement.
portée de détection limitée (< 50 mm).
Domaines d’utilisation
détection des plastiques,
contrôle de remplissage du liquide dans des flacons .
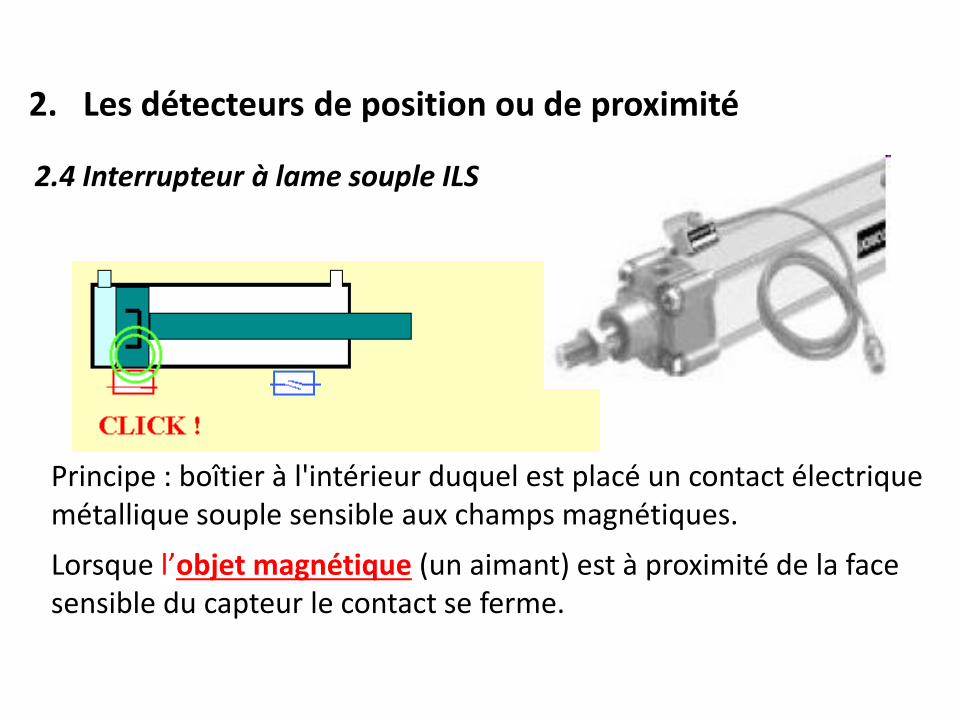
2. Les détecteurs de position ou de proximité
2.4 Interrupteur à lame souple ILS
Principe : boîtier à l'intérieur duquel est placé un contact électrique métallique souple sensible aux champs magnétiques.
Lorsque l’objet magnétique (un aimant) est à proximité de la face sensible du capteur le contact se ferme.
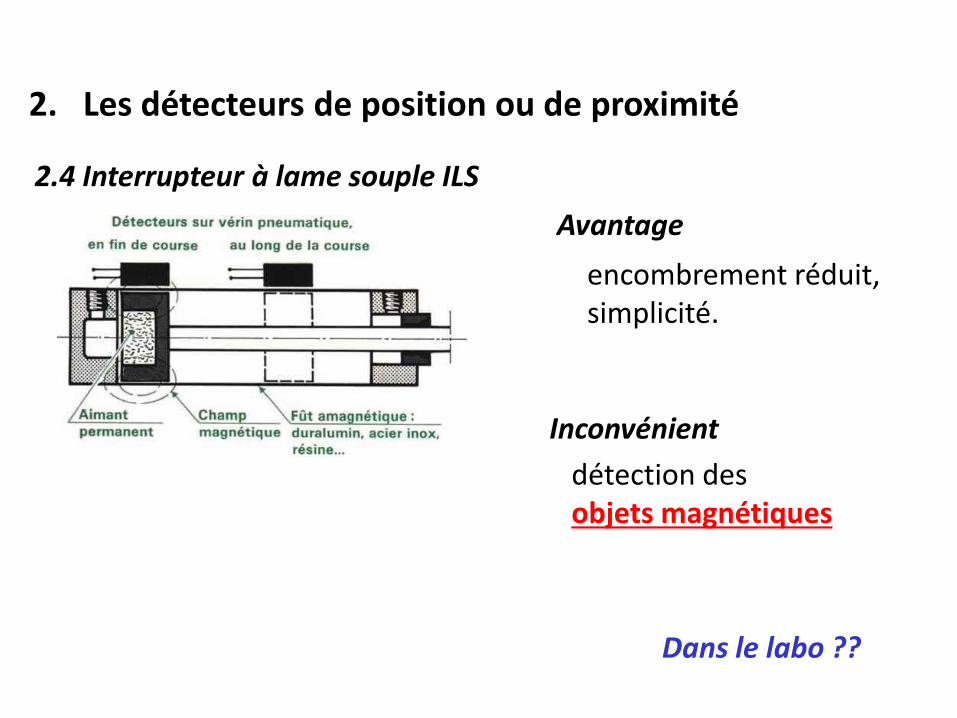
2. Les détecteurs de position ou de proximité
2.4 Interrupteur à lame souple ILS
Avantage
encombrement réduit, simplicité.
détection des objets magnétiques
Inconvénient
Dans le labo ??
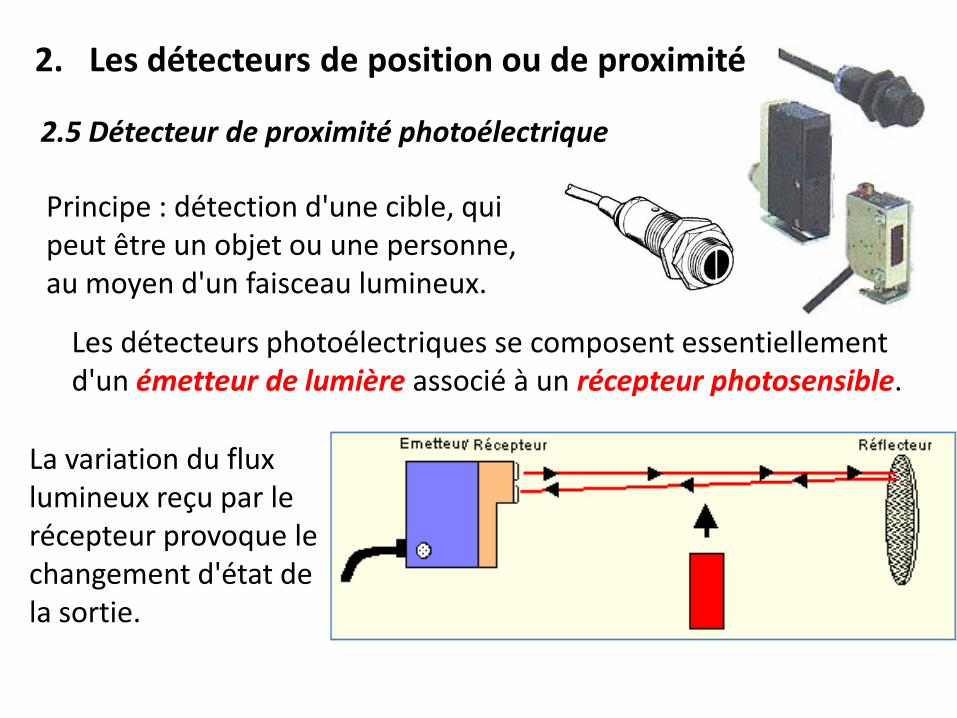
2.5 Détecteur de proximité photoélectrique
Les détecteurs photoélectriques se composent essentiellement d'un émetteur de lumière associé à un récepteur photosensible.
La variation du flux lumineux reçu par le récepteur provoque le changement d'état de la sortie.
Principe : détection d'une cible, qui peut être un objet ou une personne, au moyen d'un faisceau lumineux.
2. Les détecteurs de position ou de proximité
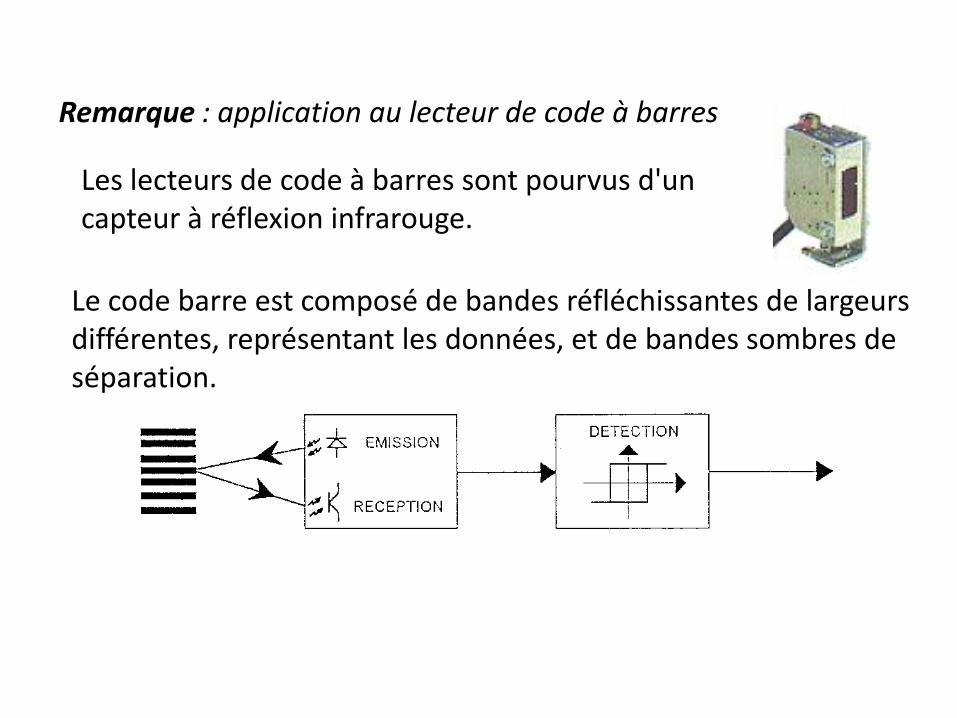
Remarque : application au lecteur de code à barres
Les lecteurs de code à barres sont pourvus d'un capteur à réflexion infrarouge.
Le code barre est composé de bandes réfléchissantes de largeurs différentes, représentant les données, et de bandes sombres de séparation.
3 Les capteurs linéaires et rotatifs – mesure d’une position
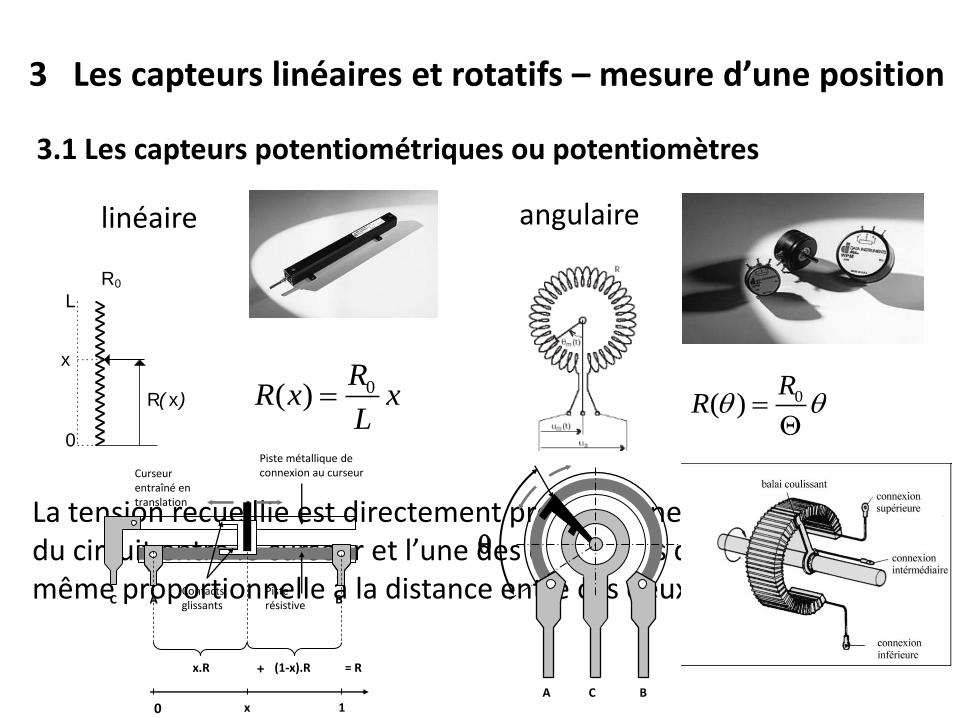
3.1 Les capteurs potentiométriques ou potentiomètres
x
L
R x( )
R0
0
linéaire angulaire
0( ) R
R x xL
0( )
RR
La tension recueillie est directement proportionnelle à la résistance du circuit entre le curseur et l’une des extrémités de la piste, elle-même proportionnelle à la distance entre ces deux points. C A B
Piste résistive
Piste métallique de connexion au curseur
x.R (1-x).R + = R
Curseur entraîné en translation
Contacts glissants
0 x 1 A B C
Avantages
Inconvénients
3 Les capteurs linéaires et rotatifs – mesure d’une position
3.1 Les capteurs potentiométriques ou potentiomètres
- simplicité d’exploitation du signal électrique en sortie, - résolution élevée, - coûts réduits.
- bruit dans le signal de sortie du au frottement du curseur sur la piste, - usure due au frottement entre le curseur et la piste, ce qui limite la durée de vie
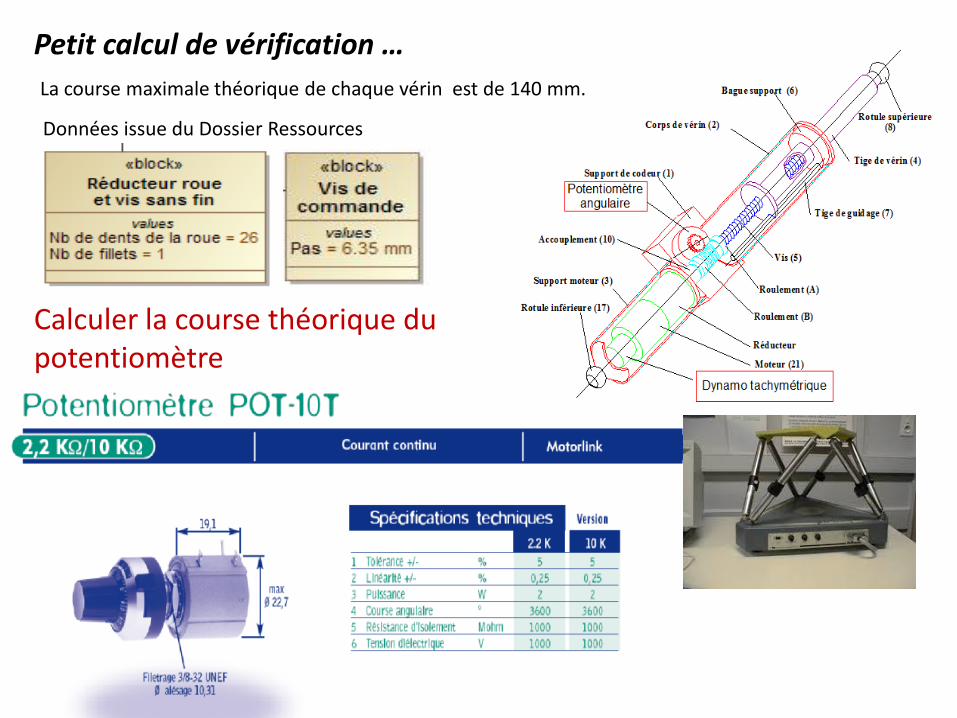
Petit calcul de vérification …
Données issue du Dossier Ressources
Calculer la course théorique du potentiomètre
La course maximale théorique de chaque vérin est de 140 mm.
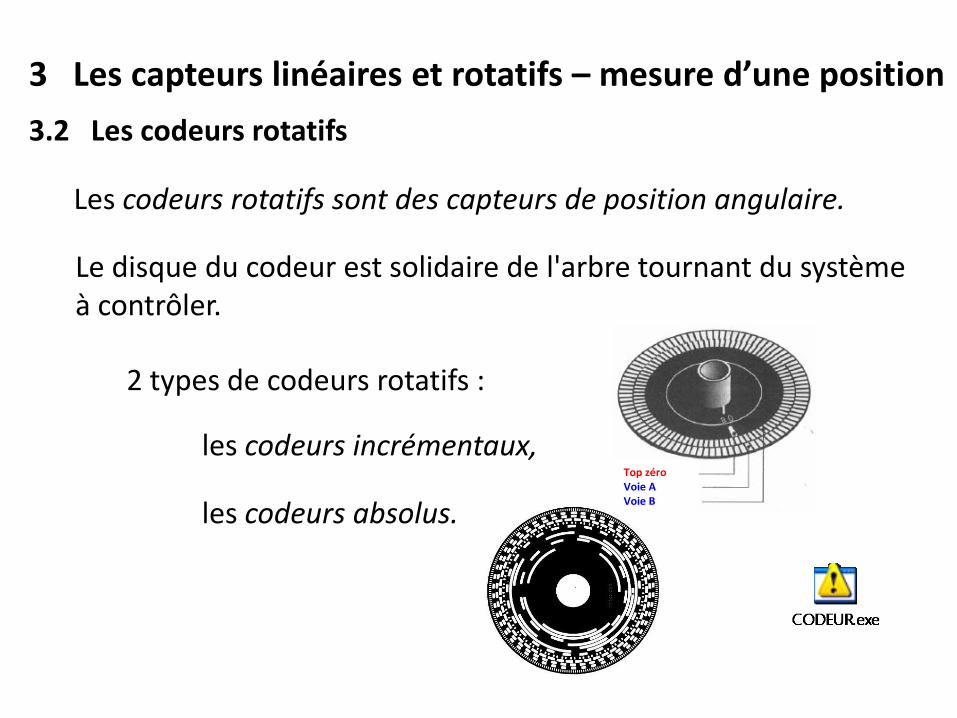
3.2 Les codeurs rotatifs
Les codeurs rotatifs sont des capteurs de position angulaire.
Le disque du codeur est solidaire de l'arbre tournant du système à contrôler.
2 types de codeurs rotatifs :
les codeurs incrémentaux,
les codeurs absolus.
Top zéro Voie A Voie B
3 Les capteurs linéaires et rotatifs – mesure d’une position

3.2.2 Le codeur absolu
3.2 Les codeurs rotatifs
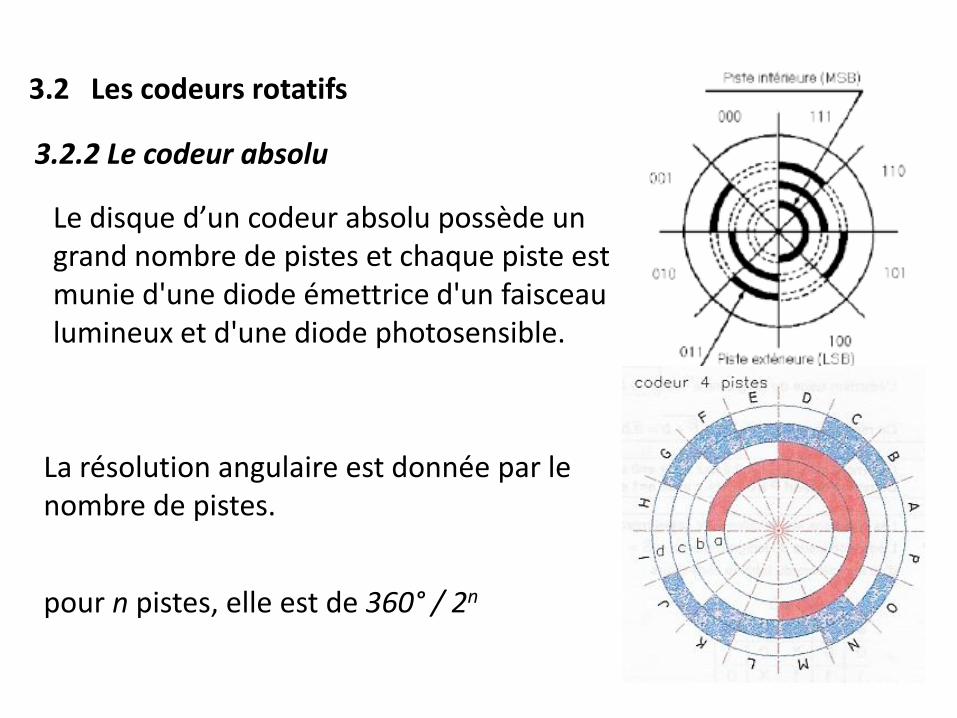
Le disque d’un codeur absolu possède un grand nombre de pistes et chaque piste est munie d'une diode émettrice d'un faisceau lumineux et d'une diode photosensible.
La résolution angulaire est donnée par le nombre de pistes.
pour n pistes, elle est de 360° / 2n
3.2.2 Le codeur absolu
3.2 Les codeurs rotatifs
3.2.2 Le codeur absolu
3.2 Les codeurs rotatifs
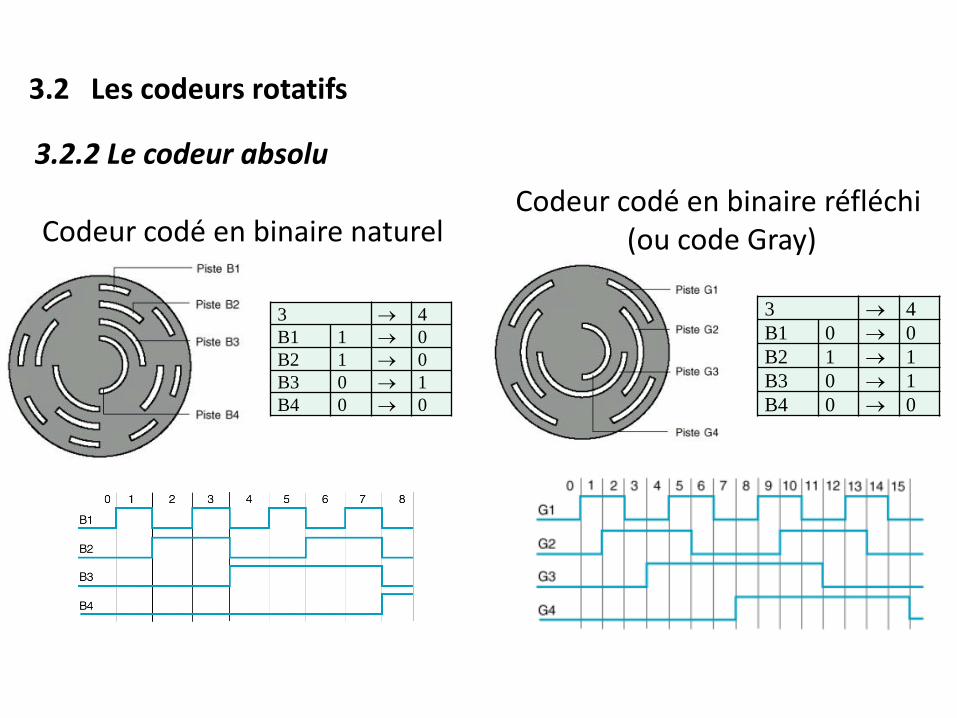
Codeur codé en binaire naturel
3 4
B1 1 0
B2 1 0
B3 0 1
B4 0 0
Codeur codé en binaire réfléchi (ou code Gray)
3 4
B1 0 0
B2 1 1
B3 0 1
B4 0 0
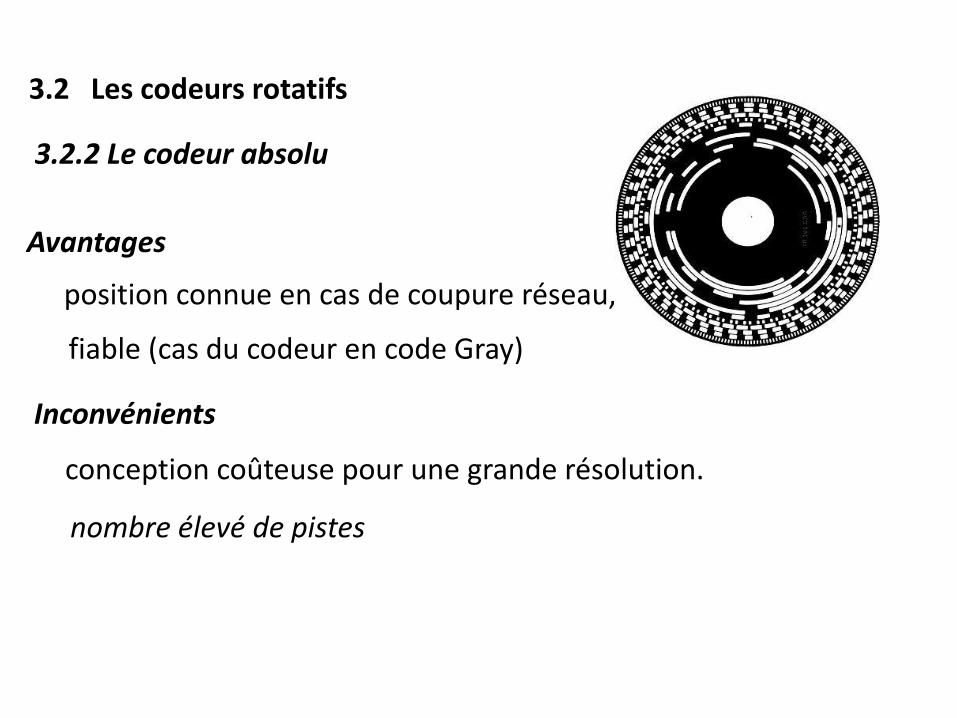
Avantages
Inconvénients
position connue en cas de coupure réseau,
fiable (cas du codeur en code Gray)
conception coûteuse pour une grande résolution.
nombre élevé de pistes
3.2.2 Le codeur absolu
3.2 Les codeurs rotatifs
Top zéro Voie A Voie B
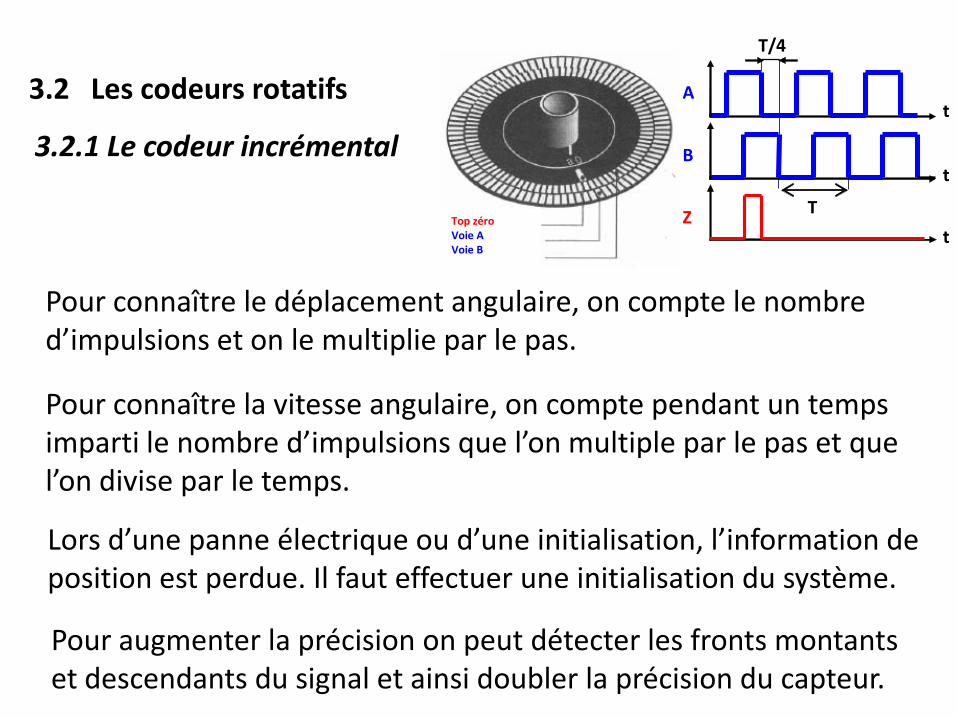
3.2.1 Le codeur incrémental
3.2 Les codeurs rotatifs
Pour connaître le déplacement angulaire, on compte le nombre d’impulsions et on le multiplie par le pas.
Pour connaître la vitesse angulaire, on compte pendant un temps imparti le nombre d’impulsions que l’on multiple par le pas et que l’on divise par le temps.
Lors d’une panne électrique ou d’une initialisation, l’information de position est perdue. Il faut effectuer une initialisation du système.
Pour augmenter la précision on peut détecter les fronts montants et descendants du signal et ainsi doubler la précision du capteur.
A
B
t
t
t Z
T
T/4
Avantages
Inconvénients
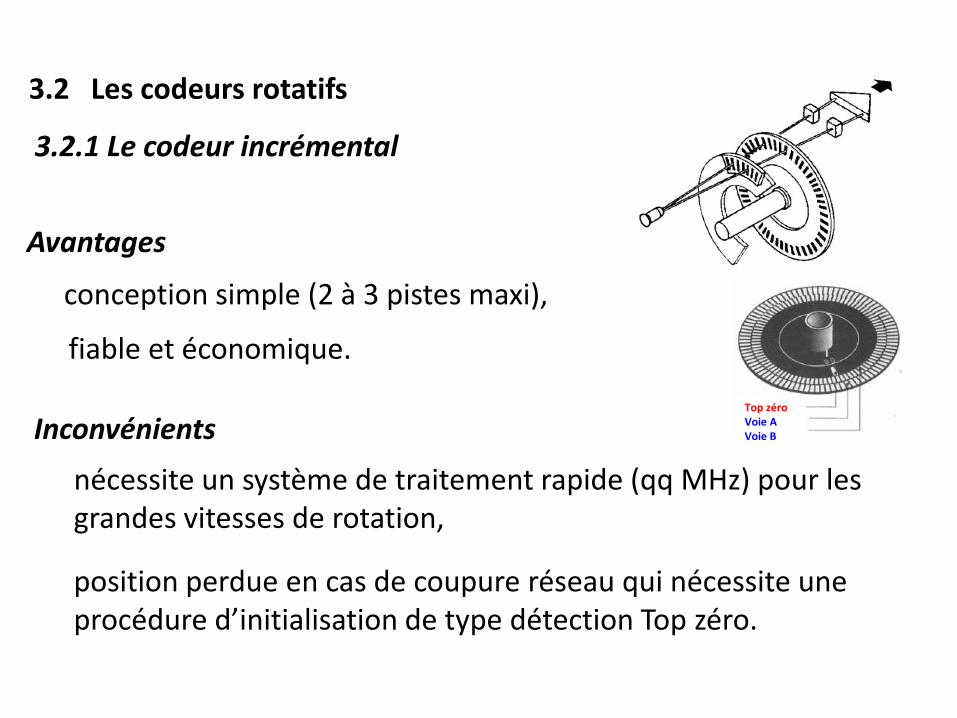
conception simple (2 à 3 pistes maxi),
fiable et économique.
nécessite un système de traitement rapide (qq MHz) pour les grandes vitesses de rotation,
position perdue en cas de coupure réseau qui nécessite une procédure d’initialisation de type détection Top zéro.
Top zéro Voie A Voie B
3.2.1 Le codeur incrémental
3.2 Les codeurs rotatifs
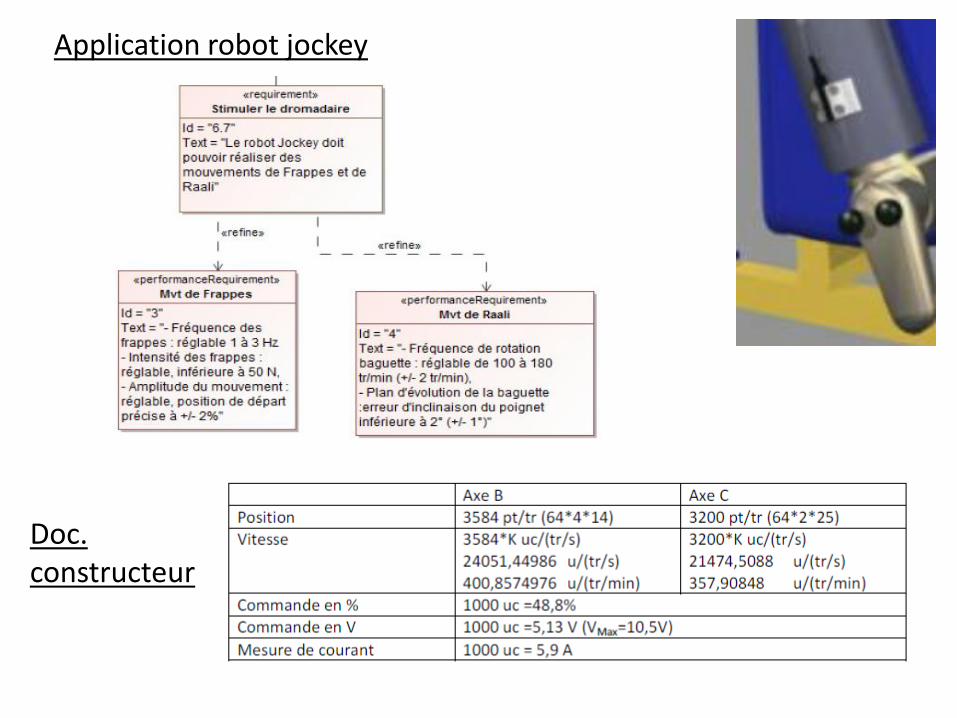
Application robot jockey
Doc. constructeur
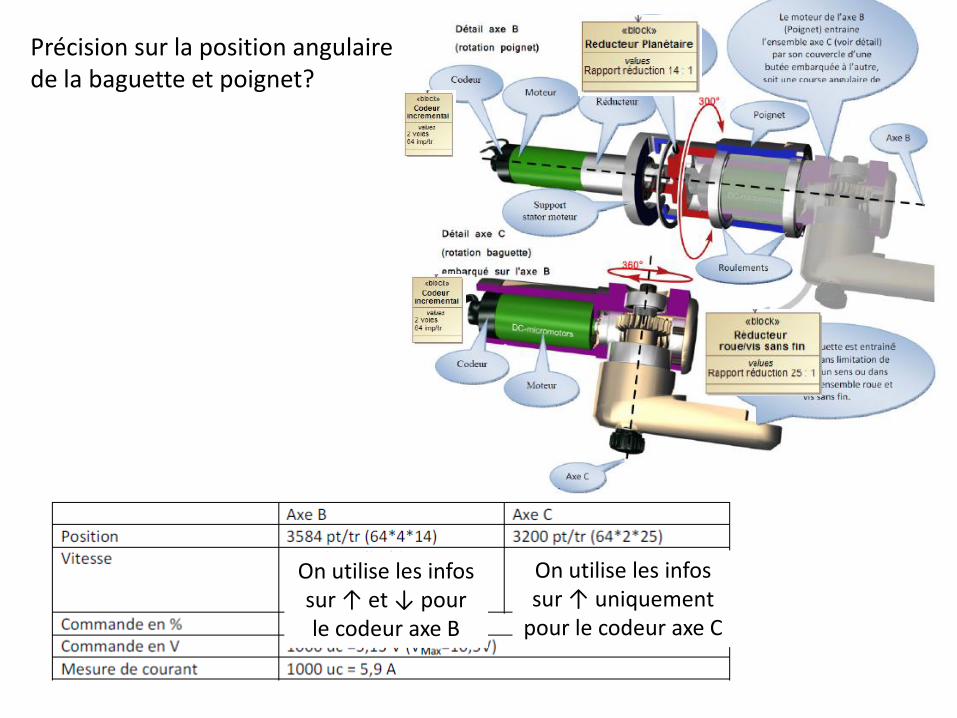
On utilise les infos sur ↑ et ↓ pour le codeur axe B
On utilise les infos sur ↑ uniquement
pour le codeur axe C
Précision sur la position angulaire de la baguette et poignet?
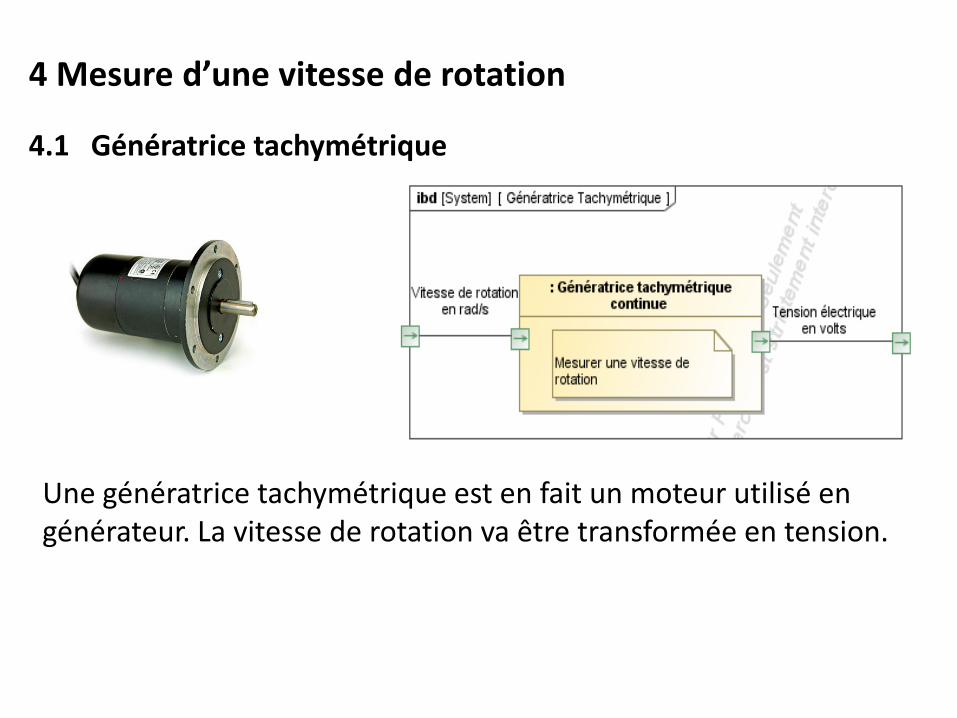
4 Mesure d’une vitesse de rotation
4.1 Génératrice tachymétrique
Une génératrice tachymétrique est en fait un moteur utilisé en générateur. La vitesse de rotation va être transformée en tension.
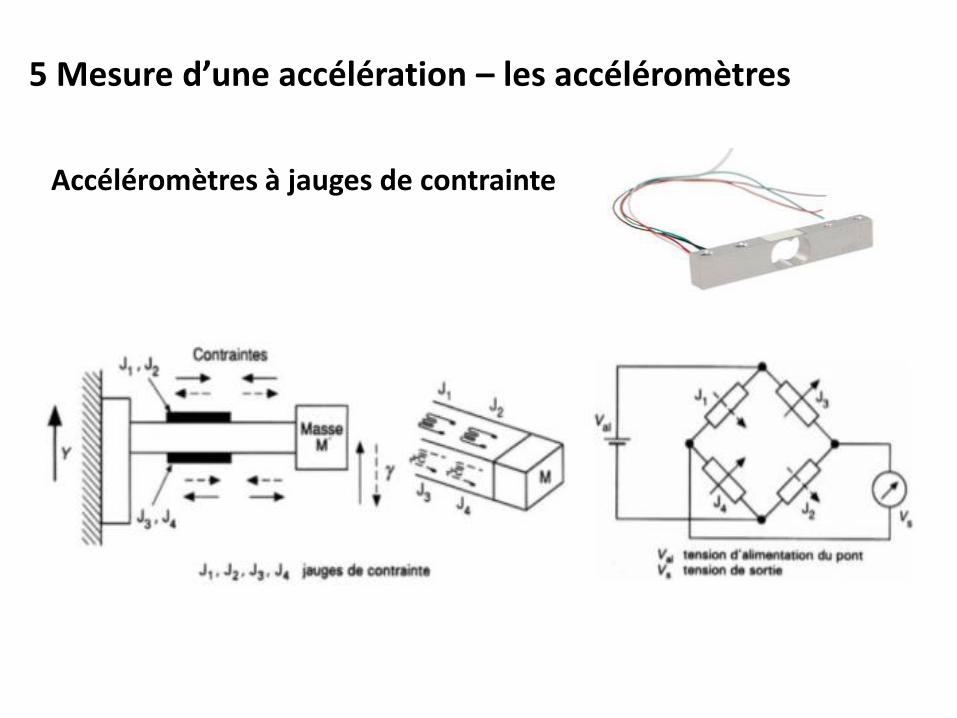
5 Mesure d’une accélération – les accéléromètres
Accéléromètres à jauges de contrainte
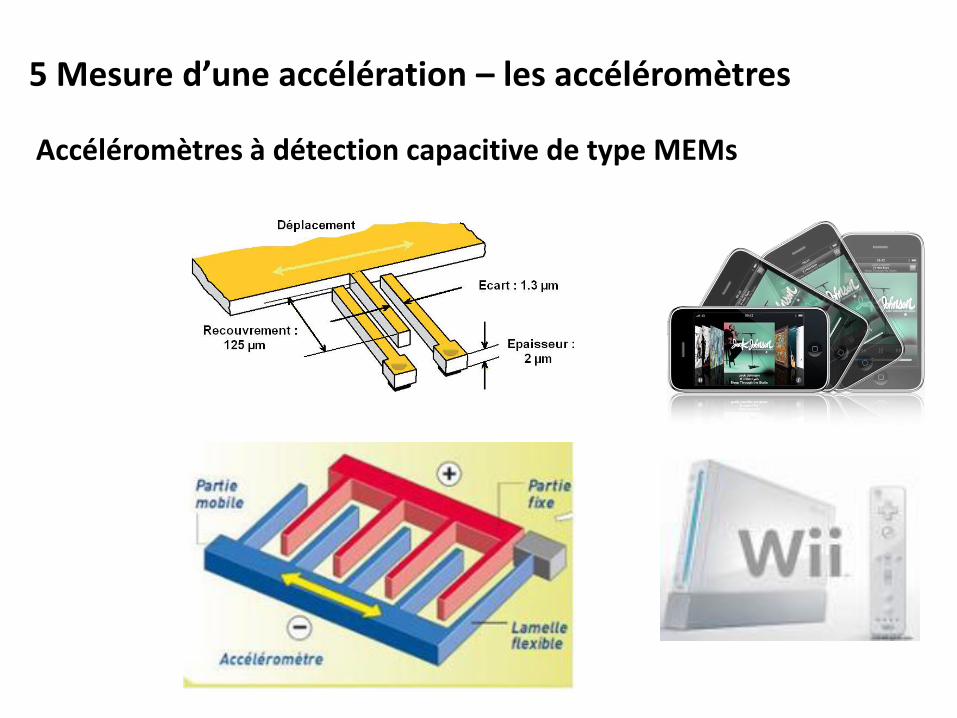
5 Mesure d’une accélération – les accéléromètres
Accéléromètres à détection capacitive de type MEMs
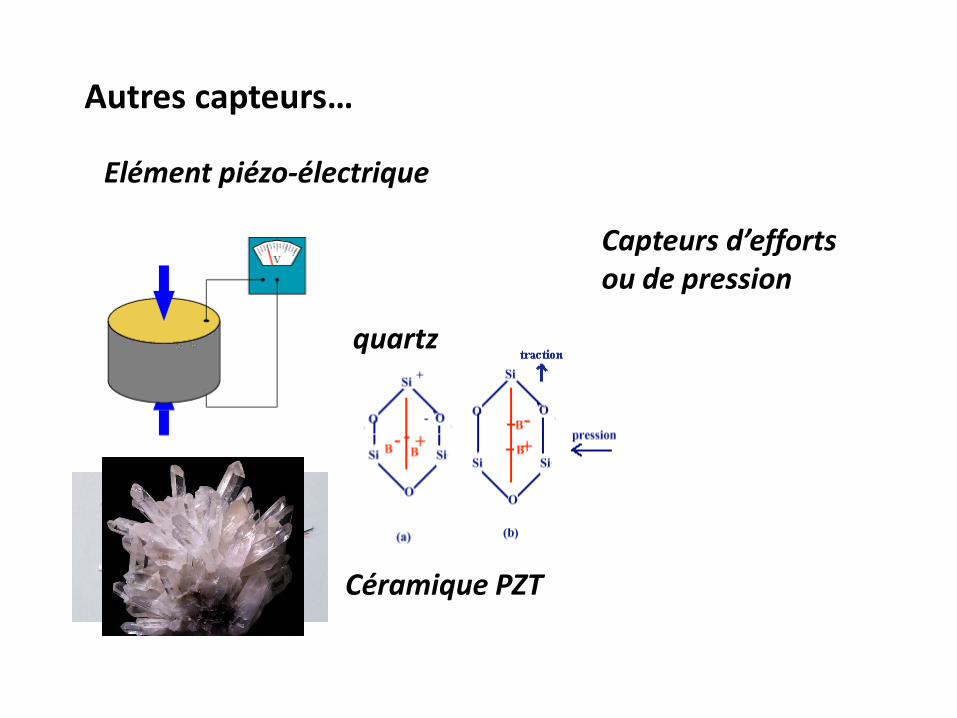
Elément piézo-électrique
Autres capteurs…
quartz
Céramique PZT
Capteurs d’efforts ou de pression
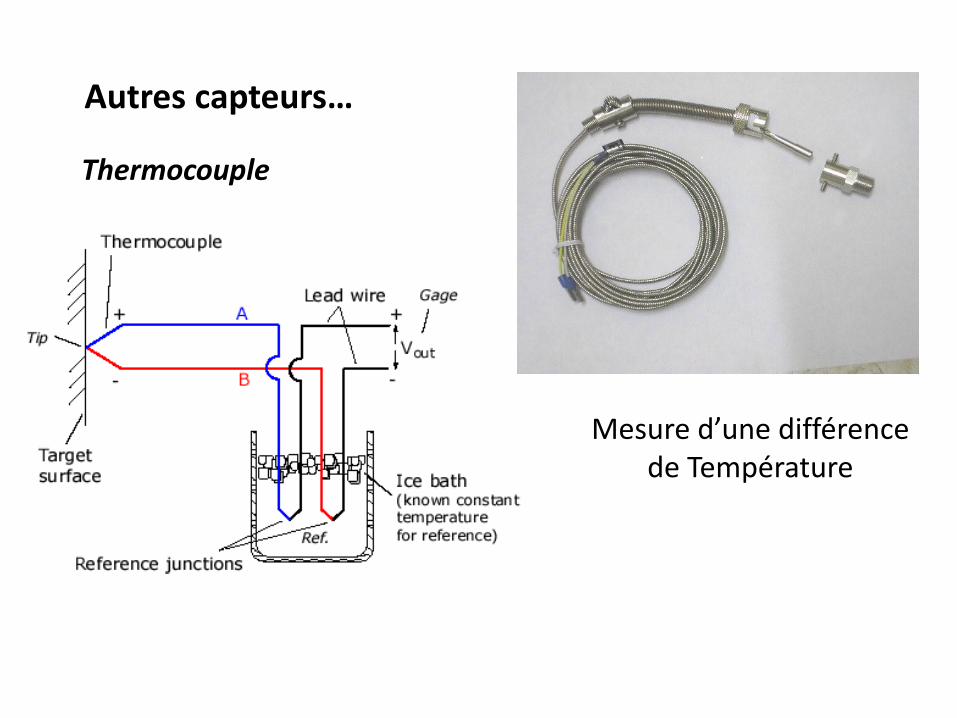
Autres capteurs…
Thermocouple
Mesure d’une différence de Température
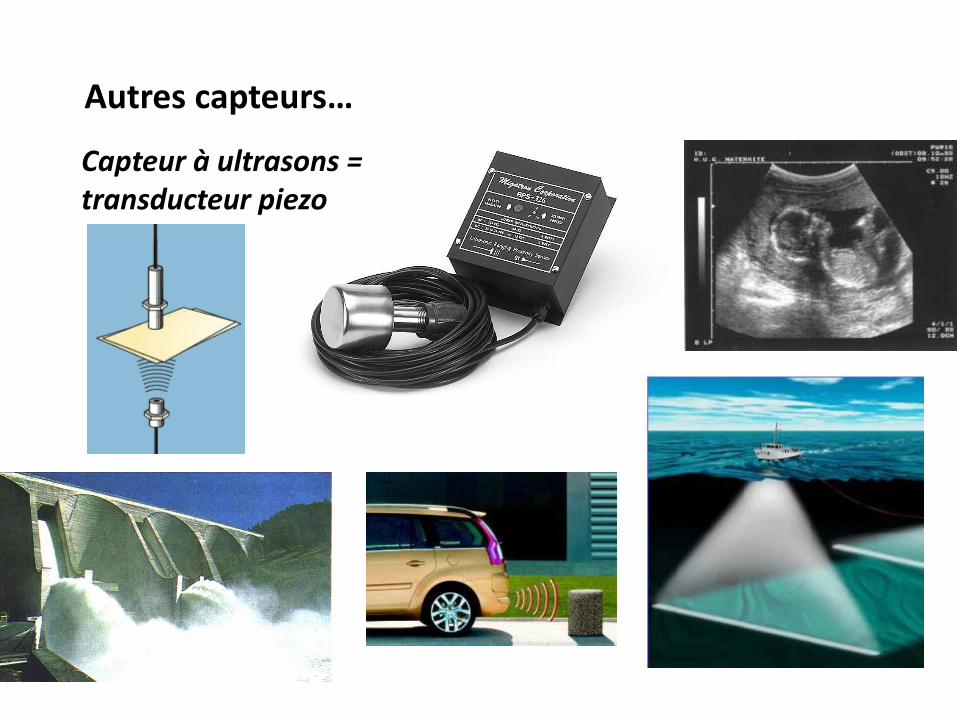
Autres capteurs…
Capteur à ultrasons = transducteur piezo








