diagnostic d’une génératrie asynhrone à doule - … · la présen e des défauts dans une...
TRANSCRIPT

Diagnostic d’une génératrice asynchrone à double alimentations :
Application à l’énergie éolienne
Par : Hakim OUYESSAAD IRSEEM / ESIGELEC
Directeur de thèse : Houcine CHAFOUK IRSEEM / ESIGELEC
Co-Directeur : Dimitri LEFEBVRE GREAH/Université du Havre
Institut de Recherche en Systèmes Electroniques EMbarqués (IRSEEM) – EA 4353

Plan

Les Énergies Renouvelables

Enjeux et Contexte La consommation d’énergie, dans le courant du siècle dernier a
considérablement augmenté à cause de l’industrialisation massive et du nombre croissant du parc automobile mondial.
La production d’énergie est un besoin fondamental dans un monde qui est en constante évolution.
La sécurité et la fiabilité des procédés industriels sont des sujets qui font l'objet d'un intérêt croissant dans la communauté scientifique.
La réduction des risques industriels et leurs impacts environnementaux fait partie des préoccupations majeures du monde industriel.
Hakim OUYESSAAD
4 Introduction
70,5 TWh 82 TWh 176 TWh 477 TWh
2005 2006 2010 2020
Contribution de l'énergie éolienne à la consommation
d'électricité en 2020
Consommation d'électricité TWh
Source : European Renoewable
Energy Council (EREC 2010))

L’apparition d’un défaut étant à l’origine de nombreux phénomènes tels que : le bruit, l’échauffement, les vibrations, etc. Ces symptômes sont la manifestation flagrante d’une modification des caractéristiques
temporelles et fréquentielles des grandeurs électriques et mécaniques La présence des défauts dans une génératrice d’une éolienne provoque des courts-
circuits dans la génératrice.
La sûreté de fonctionnement des éoliennes devient un aspect important pour la sécurité des génératrices et du réseau électrique.
Conséquences
5 Introduction Problématique
Pertes de production d’énergie et coûts de maintenance

Objectifs des travaux
Détecter et isoler les défauts électriques affectant la génératrice de l’éolienne.
Augmenter la disponibilité et la performance des génératrices des éoliennes pour en tirer le meilleur profit.
Améliorer les outils de diagnostic pour garantir la sûreté de fonctionnement des systèmes énergétiques, comme l’énergie éolienne.
AVANTAGE du Diagnostic : détection et localisation de défauts à partir d’un minimum de capteurs
Hakim OUYESSAAD
6 Introduction

Les différentes causes des défaillances dans une éolienne
Quatre causes principales de défaillance de la nacelle d’une éolienne :
Erreur humaine
Défauts de conception
Détérioration de l'équipement
Acte imprévu
une mauvaise installation des composants, etc.
Des événements naturels
Dans son contexte de fonctionnement normal, comme la fatigue, l'usure, etc.
Composants défaillants
dès leur fabrication.
Hakim OUYESSAAD
7 Introduction

Source : (Wind states Newsletter, 2004). [WIN, 2004]
42%
21% 8%
5%
5%
4% 2% 2%
11%
Panne des composants
Une défaillance du systèmede commandeCause inconnue
Vent fort
Défaillance du réseau
Foudre
32%
34%
0% 0%
1% 1%
2%
2%
2%
5% 21%
Générateur Pâles Frein d’arrêt Frein
Onduleur Palier d’arbre Mécanisme de calage Arbre de transmission
Contrôle Système électriques Boîte de vitesse
Source : Centre for Renewable Energy Systems Technology (CREST) [CREST, 2004]
Hakim OUYESSAAD
8
En Allemagne : Parc des turbines éoliennes raccordé au réseau
Royaume-Uni
Introduction

Causes internes des défauts
Mécaniques
Frottement Rotor/Stator
Excentricité
Déplacement des conducteurs
Défauts des Roulements
Electriques
Rupture des barres
Défauts statoriques
Défauts d’isolement
Causes internes de défauts de la machine asynchrone triphasée
Causes externes des
défauts
Mécaniques
Pulsation de couple
Surcharge
Mauvais montage
Environnementales
Température
Encrassement
Humidité
Electriques
Fluctuation de tension
Tension transitoire
Déséquilibre de tension
Causes externes de défauts de machine asynchrone triphasée
Origine des défaillances de la génératrice
Hakim OUYESSAAD
9 Introduction

Diagnostic des défauts
Pourquoi le diagnostic ?
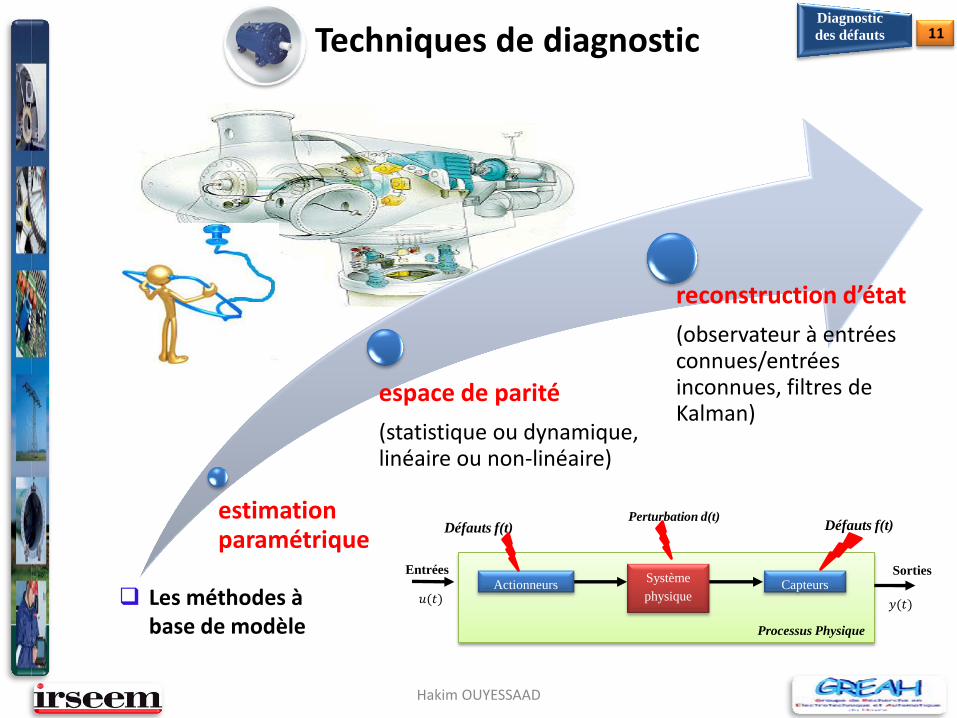
estimation paramétrique
espace de parité
(statistique ou dynamique, linéaire ou non-linéaire)
reconstruction d’état
(observateur à entrées connues/entrées inconnues, filtres de Kalman)
Techniques de diagnostic
Les méthodes à base de modèle
𝑢(𝑡)
Défauts f(t) Perturbation d(t)
Défauts f(t)
Entrées
Sorties
𝑦(𝑡)
Processus Physique
Actionneurs
Système
physique
Capteurs
Hakim OUYESSAAD
11 Diagnostic
des défauts

Diagnostic de défauts - Introduction
Diagnostic à base d’observateurs
Observateur pour les systèmes linéaires (Lunberger, …) Observateur pour les systèmes non linéaires :
de type Libshitz de type multimodèle, …
Hakim OUYESSAAD
12 Diagnostic
des défauts
𝒚 (𝒕)
Observateur Générateur de
résidus Analyseur de
résidus
𝒚(𝒕) Système Physique
Diagnostic
u(𝒕)

Observateur GOS (Generalised Observer Scheme) : le ième observateur est piloté par toutes les entrées/sorties sauf la ième entrée/sortie.
Hakim OUYESSAAD
13 Diagnostic
des défauts Banc d’observateurs
Structure (GOS) cas des défauts actionneurs
Structure (GOS) cas des défauts capteurs

Hakim OUYESSAAD
14
Observateur DOS (Detected Observer Scheme) : le ième observateur est piloté uniquement par la ième entrée/sortie.
Diagnostic
des défauts
Structure (DOS) cas des défauts actionneurs
Structure (DOS) cas des défauts capteurs

Principe de l’approche multimodèle
Comment représenter un modèle non-linéaire (LPV) par un multimodèle ?
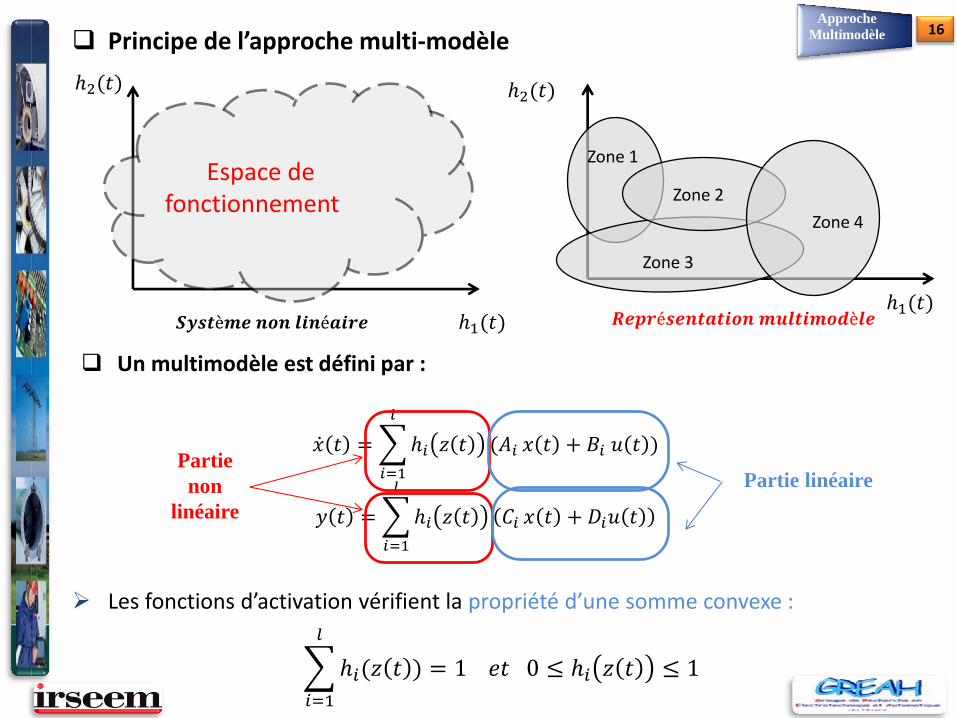
Principe de l’approche multi-modèle
Zone 1
Zone 2
Zone 3
Zone 4
ℎ1(𝑡)
ℎ2(𝑡)
Espace de fonctionnement
ℎ2(𝑡)
ℎ1(𝑡) 𝑺𝒚𝒔𝒕è𝒎𝒆 𝒏𝒐𝒏 𝒍𝒊𝒏é𝒂𝒊𝒓𝒆 𝑹𝒆𝒑𝒓é𝒔𝒆𝒏𝒕𝒂𝒕𝒊𝒐𝒏 𝒎𝒖𝒍𝒕𝒊𝒎𝒐𝒅è𝒍𝒆
16 Approche
Multimodèle
Un multimodèle est défini par :
𝑥 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
(𝐴𝑖 𝑥 𝑡 + 𝐵𝑖 𝑢 𝑡 )
𝑦 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
𝐶𝑖 𝑥 𝑡 + 𝐷𝑖𝑢 𝑡
Partie
non
linéaire
Partie linéaire
Les fonctions d’activation vérifient la propriété d’une somme convexe :
ℎ𝑖(𝑧 𝑡 )
𝑙
𝑖=1
= 1 𝑒𝑡 0 ≤ ℎ𝑖 𝑧 𝑡 ≤ 1

Techniques d’obtention d’un modèle Takagi-Sugéno
Comment obtenir un modèle T-S?
Linéarisation Identification Approche du secteur non
linéaire
Linéarisation autour d’un nombre fini de points de fonctionnement
Choix judicieux des fonctions d’appartenance
Nécessite le modèle mathématique
Transformation polytopique des termes non linéaires
Ne nécessite pas la connaissance du modèle mathématique non linéaire
Hakim OUYESSAAD
17 Approche
Multimodèle

Approche du secteur non linéaire
Lemme 1:
Si ∀ 𝑥 ∈ −𝑏 𝑎 , 𝑎 , 𝑏 ∈ ℝ+, Soit f(x(t)): →ℝ →ℝ bornée sur −𝑏 𝑎 , alors il existe deux fonctions 𝛼 𝑥 et 𝛽 𝑥 ainsi que deux réels 𝑓𝑚𝑎𝑥 et 𝑓𝑚𝑖𝑛 tels que :
𝑓 𝑥 = 𝛼(𝑥). 𝑓𝑚𝑎𝑥 + 𝛽(𝑥). 𝑓𝑚𝑖𝑛
avec 𝛼 𝑥 + 𝛽 𝑥 =1 et 𝛼 𝑥 ≥ 0 et 𝛽 𝑥 ≥ 0, 𝛼 𝑥 =𝑓 𝑥 −𝑓𝑚𝑖𝑛
𝑓𝑚𝑎𝑥−𝑓𝑚𝑖𝑛 et 𝛽 𝑥 =
𝑓𝑚𝑎𝑥−𝑓 𝑥
𝑓𝑚𝑎𝑥−𝑓𝑚𝑖𝑛
Exemple : Soit le système non linéaire autonome donné par : 𝑥 (𝑡) = 𝑥 𝑡 𝑐𝑜𝑠 𝑥 𝑡
notons que 𝑓 𝑥 𝑡 = 𝑐𝑜𝑠 𝑥 𝑡 est continue et bornée par [-1 , 1], d’après le lemme 1, on
peut écrire :
𝑐𝑜𝑠 𝑥 𝑡 =𝑐𝑜𝑠 𝑥 𝑡 + 1
2× (1) +
1 − 𝑐𝑜𝑠 𝑥 𝑡
2× (−1)
Règle 1: 𝑺𝒊 𝑥 𝑡 𝑒𝑠𝑡 ℎ1 𝑥(𝑡) 𝑨𝒍𝒐𝒓𝒔 𝑥 (𝑡) = 𝑥 𝑡 . 1
Règle 2: 𝑺𝒊 𝑥 𝑡 𝑒𝑠𝑡 ℎ2 𝑥 𝑡 𝑨𝒍𝒐𝒓𝒔 𝑥 (𝑡) = 𝑥 𝑡 . (−1)
𝑥 (𝑡) = ℎ𝑖 𝑥 𝑡
2
𝑖=1
𝑎𝑖 𝑥 𝑡
avec 𝑎1 = 1 et 𝑎2 = −1
ℎ1 𝑥(𝑡) ℎ2 𝑥(𝑡)
18 Approche
Multimodèle

Conditions de stabilité quadratiques
On considère le modèle T-S suivant (∀ 𝑡, 𝑢 𝑡 = 0)
𝑥 𝑡 = ℎ𝑖 𝑧 𝑡𝑙𝑖=1 𝐴𝑖 𝑥 𝑡 (1)
On considère la fonction candidate quadratique de Lyapunove (FQL):
𝑉 𝑥 𝑡 = 𝑥𝑇 𝑡 𝑃𝑥 𝑡 , 𝑃 = 𝑃𝑇 > 0
(1) est globalement asymptotiquement stable si :
𝑉 𝑥 𝑡 = 𝑥 𝑇 𝑡 𝑃𝑥 𝑡 + 𝑥𝑇 𝑡 𝑃𝑥 𝑡 = ℎ𝑖 𝑧 𝑡 𝑥𝑇 𝐴𝑖𝑇𝑃 + 𝑃𝐴𝑖 𝑥(𝑡) < 0
𝑙
𝑖=1
Théorème : [Tanaka et al., 1998]
Le modèle T-S (1) (GAS) s’il existe une matrice symétrique définie positive P tels que les inégalités matricielles linéaires (LMI) suivantes vérifient:
Pour i = 1,…,l, 𝐴𝑖𝑇𝑃 + 𝑃𝐴𝑖 < 0
Hakim OUYESSAAD
19 Approche
Multimodèle
Modélisation de la GADA
Comment obtenir un modèle mathématique de la génératrice ?

Modélisation de la génératrice asynchrone à double alimentations
Les hypothèses [S. El-Aimani, 2004], [A. Gaillard, 2010] : la machine a une parfaite symétrie de construction la construction mécanique est parfaitement équilibrée un entrefer constant un même nombre des phases entre le stator et le rotor les pertes ferromagnétiques sont négligeables les inductances propres sont constantes
Configuration d'une éolienne avec une machine asynchrone
Hakim OUYESSAAD
21
Paramètres de la
génératrice

les tensions statoriques et rotoriques sont exprimées par l’ensemble des équations suivantes: [K. Rothenhagen and F. W. Fuchs]
𝑣𝑑𝑠 = 𝑅𝑠𝑖𝑑𝑠 +𝑑∅𝑑𝑠
𝑑𝑡− ∅𝑑𝑠
𝑑𝜃𝑠𝑑𝑡
𝑣𝑞𝑠 = 𝑅𝑠𝑖𝑞𝑠 +𝑑∅𝑞𝑠
𝑑𝑡+ ∅𝑞𝑠
𝑑𝜃𝑠𝑑𝑡
𝑣𝑑𝑟 = 𝑅𝑟𝑖𝑑𝑟 +𝑑∅𝑑𝑟
𝑑𝑡− ∅𝑑𝑟
𝑑𝜃𝑟𝑑𝑡
𝑣𝑞𝑟 = 𝑅𝑟𝑖𝑞𝑟 +𝑑∅𝑞𝑟
𝑑𝑡+ ∅𝑞𝑟
𝑑𝜃𝑟𝑑𝑡
avec : 𝑠 =𝑑𝜃𝑠
𝑑𝑡 pulsation statorique
𝑟=𝑑𝜃𝑟
𝑑𝑡 pulsation mécanique du rotor
les équations des flux dans le repère de Park :
∅𝑑𝑠 = 𝐿𝑠𝑖𝑑𝑠 + 𝐿ℎ𝑖𝑑𝑠∅𝑞𝑠 = 𝐿𝑠𝑖𝑞𝑠 + 𝐿ℎ𝑖𝑑𝑠 ∅𝑑𝑟= 𝐿𝑟𝑖𝑑𝑟 + 𝐿ℎ𝑖𝑑𝑟 ∅𝑞𝑟= 𝐿𝑟𝑖𝑞𝑟 + 𝐿ℎ𝑖𝑑𝑟
(2)
(1)
Hakim OUYESSAAD
22
Transformation de Park
𝑥 𝑡 = 𝐴(𝑠(𝑡),𝑟 𝑡 )𝑥 𝑡 + 𝐵 𝑢 𝑡
𝑦 𝑡 = 𝐶 𝑥 𝑡
Le système sous forme d’équation d’état
Avec: 𝑥 𝑡 = [𝑖𝑑𝑠𝑖𝑞𝑠𝑖𝑑𝑟𝑖𝑞𝑟]𝑇,
𝑢 𝑡 = [𝑉𝑑𝑟𝑉𝑞𝑟 𝑉𝑑𝑠𝑉𝑞𝑠]𝑇

Il est possible de réécrire (1 et 2) sous une forme matricielle suivante :
𝐴 𝜔𝑠 𝑡 , 𝜔𝑟 𝑡
=
−𝑅𝑠
𝜎𝐿𝑠𝑃 𝜔𝑠 𝑡 +
𝐿ℎ2
𝜎𝐿𝑠𝐿𝑟𝜔𝑟 𝑡
𝐿ℎ𝑅𝑟
𝜎𝐿𝑟𝐿𝑠
𝑃𝐿ℎ𝜎𝐿𝑠
𝜔𝑟 𝑡
−𝑃 𝜔𝑠 𝑡 +𝐿ℎ2
𝜎𝐿𝑠𝐿𝑟𝜔𝑟 𝑡
−𝑅𝑠
𝜎𝐿𝑠
−𝑃𝐿ℎ𝜎𝐿𝑠
𝜔𝑟 𝑡𝐿ℎ𝑅𝑟
𝜎𝐿𝑟𝐿𝑠𝐿ℎ𝑅𝑠
𝜎𝐿𝑟𝐿𝑠
−𝑃𝐿ℎ𝜎𝐿𝑟
𝜔𝑟 𝑡−𝑅𝑟
𝜎𝐿𝑟𝑃 𝜔𝑠 𝑡 −
𝜔𝑟 𝑡
𝜎
𝑃𝐿ℎ𝜎𝐿𝑟
𝜔𝑟 𝑡𝐿ℎ𝑅𝑠
𝜎𝐿𝑟𝐿𝑠−𝑃 𝜔𝑠 𝑡 −
𝜔𝑟 𝑡
𝜎
−𝑅𝑟
𝜎𝐿𝑟
𝐵 =
−𝐿ℎ
𝜎𝐿𝑟𝐿𝑠0
1
𝜎𝐿𝑠0
0 −𝐿ℎ
𝜎𝐿𝑟𝐿𝑠0
1
𝜎𝐿𝑠1
𝜎𝐿𝑟0 −
𝐿ℎ𝜎𝐿𝑟𝐿𝑠
0
01
𝜎𝐿𝑟0 −
𝐿ℎ𝜎𝐿𝑟𝐿𝑠
la pulsation statorique 𝑠 = 2𝜋𝑓 𝑠−1
𝑽𝒅𝒔
𝑽𝒅𝒓
𝑽𝒒𝒓
𝑽𝒒𝒔
𝒓
𝒊𝒅𝒔
𝒊𝒒𝒔
𝒊𝒅𝒓
𝒊𝒒𝒓
Hakim OUYESSAAD
23

Représentation du modèle de la génératrice par un multimodèle (T-S)
Les équations dynamiques du modèle LPV s’écrivent sous la forme suivante [K. Rothenhagen and F. W. Fuchs] :
𝑥 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
𝐴𝑖 𝑥 𝑡 + 𝐵 𝑢 𝑡
𝑦 𝑡 = 𝐶 𝑥 𝑡
Remarque : Les modèles T-S obtenus via une transformation polytopique convexe dépendent directement du nombre des non-linéarités à découper. Les fonctions d’activation ont été construites de la manière suivante : la non-linéarité 𝑟(𝑡), vitesse de rotation rotorique de la génératrice
Hakim OUYESSAAD
24
𝑟 𝑡 =𝑟(𝑡) − 𝛽1𝛼1 − 𝛽1
𝛼1 +𝛼1 − 𝑟(𝑡)
𝛼1 − 𝛽1 𝛽1
Les fonctions d’activation ℎ𝑖 𝑧 𝑡
ℎ1(ω𝑟(𝑡)) ℎ2(ω𝑟(𝑡))

Les équations du multimodèle de la GADA s’écrivent de la manière suivante :
𝑥 𝑡 = ℎ1(ω𝑟 𝑡 )𝐴1+ℎ2(ω𝑟 𝑡 )𝐴2 𝑥 𝑡 + 𝐵 𝑢 𝑡
𝑦 𝑡 = 𝐶 𝑥 𝑡
Les matrices du multimodèle sont obtenues comme suit :
𝐴1 =
−𝑅𝑠
𝜎𝐿𝑠𝑃 𝜔𝑠 +
𝐿ℎ2
𝜎𝐿𝑠𝐿𝑟𝜶𝟏
𝐿ℎ𝑅𝑟
𝜎𝐿𝑟𝐿𝑠
𝑃𝐿ℎ𝜎𝐿𝑠
𝜶𝟏
−𝑃 𝜔𝑠 +𝐿ℎ2
𝜎𝐿𝑠𝐿𝑟𝜶𝟏
−𝑅𝑠
𝜎𝐿𝑠
−𝑃𝐿ℎ𝜎𝐿𝑠
𝛼1𝐿ℎ𝑅𝑟
𝜎𝐿𝑟𝐿𝑠𝐿ℎ𝑅𝑠
𝜎𝐿𝑟𝐿𝑠
−𝑃𝐿ℎ𝜎𝐿𝑟
𝜶𝟏
−𝑅𝑟
𝜎𝐿𝑟𝑃 𝜔𝑠 −
𝜶𝟏
𝜎𝑃𝐿ℎ𝜎𝐿𝑟
𝜶𝟏
𝐿ℎ𝑅𝑠
𝜎𝐿𝑟𝐿𝑠−𝑃 𝜔𝑠 −
𝜶𝟏
𝜎
−𝑅𝑟
𝜎𝐿𝑟
𝐴2 =
−𝑅𝑠
𝜎𝐿𝑠𝑃 𝜔𝑠 +
𝐿ℎ2
𝜎𝐿𝑠𝐿𝑟𝜷𝟏
𝐿ℎ𝑅𝑟
𝜎𝐿𝑟𝐿𝑠
𝑃𝐿ℎ𝜎𝐿𝑠
𝜷𝟏
−𝑃 𝜔𝑠 +𝐿ℎ2
𝜎𝐿𝑠𝐿𝑟𝜷𝟏
−𝑅𝑠
𝜎𝐿𝑠
−𝑃𝐿ℎ𝜎𝐿𝑠
𝜷𝟏
𝐿ℎ𝑅𝑟
𝜎𝐿𝑟𝐿𝑠𝐿ℎ𝑅𝑠
𝜎𝐿𝑟𝐿𝑠
−𝑃𝐿ℎ𝜎𝐿𝑟
𝛽1−𝑅𝑟
𝜎𝐿𝑟𝑃 𝜔𝑠 −
𝜷𝟏
𝜎
𝑃𝐿ℎ𝜎𝐿𝑟
𝜷𝟏
𝐿ℎ𝑅𝑠
𝜎𝐿𝑟𝐿𝑠−𝑃 𝜔𝑠 −
𝜷𝟏
𝜎
−𝑅𝑟
𝜎𝐿𝑟
Hakim OUYESSAAD
25

Résultats de simulation
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 18.99
9
9.01
9.02
9.03
Temps (s)
Vitesse d
u v
en
t (m
/s)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
50
100
150
Temps (s)
wr (rad
/s)
Fig -1- Profil du vent appliqué à l’éolienne Fig -2- Vitesse de rotation de la génératrice
0 0.2 0.4 0.6 0.8 1
0
0.5
1
Temps (s)
h1
h2Fig -3 - Les fonctions d’activation
26

Résultats de simulation
Les courants de la génératrice :
0.82 0.84 0.86 0.88 0.9
-50
0
50
Temps(s)
Cou
rant
(A)
ids
ids-mul
0.81 0.82 0.83 0.84 0.85
-50
0
50
Temps(s)
Cou
rant
(A)
iqs
iqs-mul
0.8 0.81 0.82 0.83 0.84 0.85 0.86
-50
0
50
Temps(s)
Cou
rant
(A)
idr
idr-mul
0.81 0.82 0.83 0.84 0.85 0.86
-100
0
100
Temps(s)
Cou
rant
(A)
iqr
iqr-mul
Fig -4- Sorties de la génératrice et leurs estimations par le multimodèle
Zoo
m
-100-50
050
100
-50
0
500.4
0.6
0.8
1
iqs
(A)ids
(A)
Tem
ps
(s) i
qs modèle
iqs
mul-modèle
-100-50
050
100
-50
0
500.4
0.6
0.8
1
iqr
(A)idr
(A)
Tem
ps
(s)
ids
modèle
iqs
mul-modèle
27

Application à la détection de défauts
capteurs de GADA
Comment les approches proposées se comportent pour
la détection de défauts capteur ?

Diagnostic de la génératrice à base d’observateurs à entrées inconnues
Système avec entrées inconnues:
L’observateur
𝑔 𝑡 = ℎ𝑖 𝜉 𝑡𝑙
𝑖=1 𝑁𝑖 𝑔 𝑡 + 𝐺𝑖 𝑢 𝑡 + 𝐿𝑖𝑦 𝑡
𝑥 𝑡 = ℎ𝑖 𝜉 𝑡𝑙𝑖=1 (𝑔 𝑡 − 𝐸𝑦 𝑡 )
Objectif : déterminer 𝑁𝑖, 𝐺𝑖, 𝐿𝑖 et E pour que : 𝑥 𝑡 → 𝑥 𝑡 → 𝑒 𝑡 = 𝑥 𝑡 − 𝑥 𝑡 , l’erreur d’estimation, tend vers zéro → 𝑒 𝑡 est indépendante des entrées inconnues 𝑣 𝑡 La dynamique de l’erreur d’estimation d’état
𝑒 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
(𝑁𝑖 𝑒 𝑡 + 𝑃𝐴𝑖 − 𝑁𝑖 − 𝐾𝑖𝐶)𝑥(𝑡) + (𝑃𝐵 − 𝐺𝑖 𝑢 𝑡 ) + 𝑃𝑅𝑣 𝑡
avec : 𝑃 = 𝐼 + 𝐸𝐶
𝑥 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
𝐴𝑖 𝑥 𝑡 + 𝐵𝑢 𝑡 + 𝑅𝑣 𝑡
𝑦 𝑡 = 𝐶 𝑥 𝑡
Hakim OUYESSAAD
29

Diagnostic à base d’observateurs à entrées inconnues L’erreur d’estimation tend asymptotiquement vers zéro si les conditions suivantes sont
vérifiées :
𝑁𝑖𝑇𝑋 + 𝑋𝑁𝑖 < 0 , ∀ 𝑖 ∈ 1, … , 𝑙 Inégalité Matricielles Linéaire
variable 𝑁𝑖 et 𝑋> 0 𝑃𝑅 = 0 𝑃 = 𝐼 + 𝐸𝐶 𝑁𝑖= 𝑃𝐴𝑖 − 𝐾𝑖𝐶 𝐿𝑖 = 𝐾𝑖 −𝑁𝑖𝐸 𝐺𝑖 = 𝑃𝐵
ℎ𝑖 𝑧 𝑡𝑙𝑖=1 𝑁𝑖 est stable
La dynamique de l’erreur d’estimation d’état est donnée par :
𝑒 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
𝑁𝑖 𝑒 𝑡
=> L’ensemble de ces contraintes garantit la convergence globale de l’observateur,
Estimation de l’entrée inconnue est donnée par l’équation suivante :
𝑣 𝑡 = (𝑄𝑇𝑄)−1𝑄𝑇 𝑥 𝑡 − ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
𝐴𝑖 𝑥 𝑡 + 𝐵 𝑢 𝑡
𝑦 𝑡 − 𝐶𝑥 𝑡
30
𝑄 = ℎ𝑖 𝑧 𝑡 𝑅
𝑙
𝑖=1
𝐷
La matrice Q doit être de plein rang colonne :

Application à la détection de défauts capteurs
Multiobservateurs avec un schéma DOS
rDOS4(t)
rDOS3(t)
rDOS1(t)
rDOS2(t)
y4(t)
Observateur 4 Génération de
résidu
Observateur 1 Génération de
résidu
y1(t)
GADA u(t)
𝒗 (t) y1(t)
y2(t)
y3(t)
y4(t)
Défauts = fc1(t)…. fc4(t)
Fig -5- Banc d’observateurs suivant un schéma DOS pour la détection des défauts capteurs
31
Le système observé devient :
𝑥 𝑡 = ℎ𝑖 𝜉 𝑡
𝑙
𝑖=1
𝐴𝑖 𝑥 𝑡 + 𝐵 𝑢 𝑡 + 𝑅𝑣 𝑡
𝑦 𝑡 = 𝐶 𝑥 𝑡 + 𝑫𝒄𝒇𝒄 𝒕
avec : 𝑓𝑐 𝑡 = 𝑓𝑐1 𝑡 𝑓𝑐2 𝑡 𝑓𝑐3 𝑡 𝑓𝑐4 𝑡 𝑇 , les entrées inconnues 𝑣 𝑡 = [𝑉𝑑𝑠𝑉𝑞𝑠]
𝑇
défaut capteur

Défauts multiples et simultanés → y1(t) et y4(t). Les sorties y2(t) et y3(t), sont supposées sans défaut. Les défauts sont injectés à l’instant t= 0.85s et disparaissent à l’instant t=0.87s et avec
une amplitude constante égale à 20% par rapport à la valeur nominale du courant.
0.8 0.82 0.84 0.86 0.88 0.9
0
10
20
Défaut et bruit considérés sur y1(t)
Am
plitu
de
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
1.5
Défaut et bruit considérés sur y2(t)
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
1.5
Défaut et bruit considérés sur y3(t)
Am
plitu
de
0.8 0.82 0.84 0.86 0.88 0.9
0
10
20
Défaut et bruit considérés sur y4(t)
Défaut fc1
Défaut fc4 0.8 0.82 0.84 0.86 0.88 0.9
-5
0
5
10
15
Temps (s)
Résid
u
r1
0.8 0.82 0.84 0.86 0.88 0.9-5
0
5
10
15
Temps (s)
Résid
u
r2
0.8 0.82 0.84 0.86 0.88 0.9-5
0
5
10
15
Temps (s)
Résid
u
r3
0.8 0.82 0.84 0.86 0.88 0.9-5
0
5
10
15
Temps (s)
Résid
u
r4
Défaut fc1
Défaut fc4
Fig -6 - Perturbation sur les mesures
Fig -7- Résidus de l’observateur unique (SOS) en présence de défauts
Hakim OUYESSAAD
32

0.8 0.82 0.84 0.86 0.88 0.9-505
1015
rDOS11
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS12
0.8 0.82 0.84 0.86 0.88 0.9-505
1015
rDOS13
Résid
u m
ultio
bserv
ateu
r 1
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS14
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS21
Résid
u m
ultio
bserv
ateu
r 2
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS22
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS23
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS24
3 4
2 1
Utilisation du Banc d’observateurs DOS pour la détection des défauts multiples et simultanés
Fig -8- Évolution des résidus rDOS,i,j en utilisant le schéma pour la détection de défauts capteurs de courants
Hakim OUYESSAAD
33
0.8 0.82 0.84 0.86 0.88 0.9-5
0
5
10
15
rDOS44
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS31
0.8 0.82 0.84 0.86 0.88 0.9-505
1015
rDOS42
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS34
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS41
Résid
u m
ultio
bserv
ateu
r 4
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS33
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS43
0.8 0.82 0.84 0.86 0.88 0.9-0.5
0
0.5
1
rDOS32
Résid
u m
ultio
bserv
ateu
r 3
Variation de la résistance Rr

Application à la détection de défauts lors d’un creux de
tension du réseau
Comment se comporte la génératrice lors d’un creux de tension ?

Application a la génératrice lors d’un creux de tension du réseau
Les creux de tension sont l’un des plus importants problèmes pour la qualité des
réseaux électriques. Un creux de tension est une réduction soudaine (entre 10% et 90%) de la tension à un
point du réseau, qui peut durer environ 1 minute [Y. Ling et al. 2013]. Le creux de tension
Tension
déclarée
Amplitude du
creux de tension
Profondeur du
creux de tension
Durée
U
Durée du creux de tension
Hakim OUYESSAAD
35

Diagnostic par formalisme 𝐇∞ La conception d’un générateur de résidus pour le diagnostic a été utilisé dans plusieurs domaines, par exemple [J. Stoustrup et al. 1997], [T. Suzuki et al. 1999] et [D. Ichalal, 2009]
Formulation du problème : Considérons le système non linéaire T-S, donné par la représentation d’état suivante [K. Tanaka et al. 2001] :
𝑥 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
𝐴𝑖 𝑥 𝑡 + 𝐵𝑖 𝑢 𝑡 + 𝑅𝑖 𝑣 𝑡 +𝐹𝑖 𝑓(𝑡)
𝑦 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
(𝐶𝑖 𝑥 𝑡 + 𝐷𝑖 𝑓 𝑡 )
Conception du générateur de résidus : Un générateur de résidus est proposé sous la
forme suivante :
𝑥 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
𝐴𝑖 𝑥 𝑡 + 𝐵𝑖 𝑢 𝑡 + 𝑅𝑖𝑣 𝑡 + 𝐿𝑖(𝑦 𝑡 − 𝑦 (𝑡) )
𝑦 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
(𝐶𝑖 𝑥 𝑡 )
Hakim OUYESSAAD
36
(1)
(2)

La dynamique de l’erreur d’estimation d’état :
𝑒 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
ℎ𝑘 𝑧 𝑡
𝑙
𝑘=1
( 𝐴𝑖 − 𝐿𝑖𝐶𝑘) 𝑒 𝑡 + (𝐹𝑖−𝐿𝑖𝐷𝑘)𝑓(𝑡)
L’objectif de la synthèse d’observateur se pose dans les termes suivants : Trouver les gains 𝐿𝑖 de l’observateur (3) pour :
l’erreur d’estimation d’état 𝑒(𝑡) → 0 Atténuer l’influence des 𝑓(𝑡) sur 𝑒(𝑡)
Cet objectif se traduit par les contraintes de performance suivantes :
lim𝑡→∞
𝑒 𝑡 = 0 avec 𝑓 𝑡 = 0
𝑒(𝑡) 22 < 𝛾 𝑓(𝑡) 2
2 avec 𝑓 𝑡 ≠ 0 et 𝑒 𝑡 = 0
𝜸 est un scalaire positif qui indique le niveau d’atténuation ou taux de performance 𝐻∞entre 𝑓(𝑡) et l’erreur 𝑒(𝑡).
Hakim OUYESSAAD
37
(3)
(4)

En introduisant une dynamique virtuelle, (3) peut être réécrite comme suit :
𝑒 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
ℎ𝑘 𝑧 𝑡
𝑙
𝑘=1
(𝐴𝑖 − 𝐿𝑖𝐶𝑘) 𝑒 𝑡 + (𝐹𝑖−𝐿𝑖𝐷𝑘)𝑓(𝑡)
𝟎𝑟 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
(𝐶𝑖𝑒 𝑡 + 𝐷𝑖 𝑓 𝑡 ) − 𝑟 𝑡
où 0 ∈ ℝ𝑚𝑥𝑛 est une matrice nulle. L’équation (4) peut être réécrite sous une forme matricielle suivante :
𝐼 00 0
𝑒 (𝑡)𝑟 (𝑡)
= ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
ℎ𝑘 𝑧 𝑡
𝑙
𝑘=1
𝐴𝑖 − 𝐿𝑖𝐶𝑘 0 𝐶𝑖 − 𝐼
𝑒(𝑡)𝑟(𝑡)
+𝐹𝑖 − 𝐿𝑖𝐷𝑘
𝐷𝑖𝑓(𝑡)
avec
𝐸 =𝐼 00 0
, 𝑄 𝑡 =𝑒(𝑡)𝑟(𝑡)
, 𝐻𝑖𝑘 =𝐴𝑖 − 𝐿𝑖𝐶𝑘 0
𝐶 −𝐼 , 𝑊𝑖𝑘 =
𝐹𝑖 − 𝐿𝑖𝐷𝑘
𝐷𝑖
Hakim OUYESSAAD
38
(4)

Soit 𝑉(𝑒 𝑡 ) la fonction candidate de Lyapunov définie par 𝑉 𝑒 𝑡 = 𝑄𝑇(𝑡)𝐸𝑃𝑄(𝑡)
On choisit 𝑃 =𝑃1 00 𝑃2
.
D’où
𝑉 𝑒 𝑡 =𝑒(𝑡)𝑟(𝑡)
𝑻𝐼 00 0
𝑃1 00 𝑃2
𝑒(𝑡)𝑟(𝑡)
avec la condition de symétrie : 𝐸𝑃 = 𝑃𝑇𝐸𝑇 D’après la condition de symétrie on trouve 𝑃1 = 𝑃1
𝑇 > 0 et 𝑃2 est une matrice libre La convergence d’état 𝑒(𝑡) → 0 est assurée si :
𝑉 𝑒 𝑡 > 0, ∀𝑡 et 𝑒 𝑡 ≠ 0
𝑉 𝑒 𝑡 < 0, ∀𝑡 et 𝑒 𝑡 ≠ 0
La condition de la stabilité de l’erreur d’estimation sous 𝐇∞ si :
𝑄 𝑇 𝑡 𝐸𝑃𝑄 𝑡 + 𝑄𝑇 𝑡 𝐸𝑃𝑄 𝑡 + 𝑄𝑇 𝑡 𝐸𝑄 𝑡 − 𝛾2𝑓𝑇 𝑡 𝑓 𝑡 <0
Hakim OUYESSAAD
39

c.-à-d. si:
𝑄𝑇 𝑡 𝐻𝑖𝑘𝑇𝑃𝑄 𝑡 + 𝑓𝑇 𝑡 𝑊𝑖𝑘
𝑇𝑃𝑄 𝑡 + 𝑄𝑇 𝑡 𝑃𝐻𝑖𝑘𝑄 𝑡 + 𝑄𝑇 𝑡 𝑃𝑊𝑖𝑘𝑓 𝑡 +𝑄𝑇 𝑡 𝐸𝑄 𝑡 − 𝛾2𝑓𝑇 𝑡 𝑓 𝑡 < 0
→ Soit, sous sa forme matricielles :
𝑄𝑇(𝑡)
𝑓𝑇(𝑡)
𝐻𝑖𝑘𝑇𝑃 + 𝑃𝐻𝑖𝑘 + 𝐸 ∗
𝑊𝑖𝑘𝑇𝑃 −𝛾2 𝐼
𝑄(𝑡)𝑓(𝑡)
< 0
avec ∶ 𝐾𝑖 = 𝑃1𝐿𝑖 et 𝛾 = 𝛾2. Théorème : le système (4) est stable s’il existe des matrices 𝑃1 = 𝑃1
𝑇 > 0, 𝑃2, 𝐾𝑖 = 𝑃1𝐿𝑖 et un scalaire positif 𝛾 = 𝛾2 tels que les LMIs (5) sont satisfaits pour i, k=1,…,l . les inégalités matricielles :
𝑃1𝐴𝑖 + 𝐴𝑖𝑇𝑃1 − 𝐾𝑖𝐶𝑘 − 𝐶𝑘
𝑇𝐾𝑖𝑇 + 𝐼 ∗ ∗
𝑃2𝐶𝑖 −2 𝑃2𝑇 ∗
𝐹𝑖𝑇𝑃1 − 𝐷𝑘
𝑇𝐾𝑖𝑇 𝐷𝑖
𝑇𝑃2 −𝛾 𝐼
< 0
Hakim OUYESSAAD
40
(5)

Modèle mathématique du courant rotorique pendant une chute de tension :
𝑖𝑟2𝑟 =
𝑘𝑠𝑅𝑟 + 𝑗𝑋
−𝑔 𝑉𝑠 − 𝑉 𝑒−𝑡 𝜏𝑟 − 𝑔𝑉𝑒𝑗𝜔𝑡 + 1 − 𝑔 (𝑉𝑠 − 𝑉)𝑒−𝑗𝜔𝑟𝑡𝑒−𝑡 𝜏𝑟
Application du diagnostic à la génératrice lors d’un creux de tension La nouvelle représentation d’état de la génératrice avec défauts sur le réseau est donnée par :
𝑥 𝑡 = ℎ𝑖 𝑧 𝑡
𝑙
𝑖=1
𝐴𝑖𝑥 𝑡 + 𝐵 𝑢 𝑡 + 𝐹𝑓(𝑡)
𝑦 𝑡 = 𝐶 𝑥 𝑡
Le vecteur de défaut s’écrit : 𝑓 𝑡 = 0 0 𝒊𝒅𝒓𝟐𝒓 (𝒕) 𝒊𝒒𝒓𝟐
𝒓 (𝒕)𝑇
les inégalités matricielles associées à ce cas de défaut :
𝑃1𝐴𝑖 + 𝐴𝑖𝑇𝑃1 − 𝐾𝑖𝐶𝑘 − 𝐶𝑘
𝑇𝐾𝑖𝑇 + 𝐼 ∗ ∗
0 −2 𝑃2𝑇 ∗
𝐹𝑖𝑇𝑃1 0 −𝛾 𝐼
< 0
41
Paramètres de la génératrice

Simulation : génération de signaux sans défauts
-400
-200
0
200
400
-400
-200
0
200
4000
0.5
1
Vqs
(V)V
ds (V)
Tem
ps
(s)
Vs
Fig -3 - Entrées appliquées à la génératrice
-100-50
050
100
-50
0
500.4
0.6
0.8
1
iqs
(A)ids
(A)
Tem
ps (s
) iqs
modèle
iqs
mul-modèle
Fig -4- Sorties de la génératrice et leurs estimations à l’aide du multimodèle
42
0 0.2 0.4 0.6 0.8 1-0.5
0
0.5
Temps (s)
r1
0 0.2 0.4 0.6 0.8 1-0.5
0
0.5
Temps (s)
r2
0 0.2 0.4 0.6 0.8 1-1
0
1
Temps (s)
r3
0 0.2 0.4 0.6 0.8 1-1
0
1
Temps (s)
r4
Fig -5- Évolution des résidus en l’absence de défauts
L’évolution des résidus, en l’absence de défauts :

Simulation en présence de défauts
Les défauts 𝑓3 𝑡 et 𝑓4 𝑡 sont injectés sur les entrées 𝑢3 𝑡 et 𝑢4 𝑡 à l’instant t=0.2s respectivement.
Les entrées 𝑢1 𝑡 et 𝑢2 𝑡 sont supposées sans défaut, cela est dû au creux de tension
qui affecte uniquement la tension du stator.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-400
-200
0
200
400
Temps (s)
Ten
sio
n (
V)
Chute de tension dans le stator
Vds
et Vqs
de 80%
-400-200
0200
400
-500
0
5000
0.2
0.4
0.6
0.8
1
Vqs
(V)Vds
(V)
Tem
ps
(s)
Chute de la tension de 80%
Fig -6- La tension du stator pendant un défaut de creux de tension
Hakim OUYESSAAD
43

Simulation en présence de défauts
-100 0 100 200-1000
100200
0
0.2
0.4
0.6
0.8
1
iqr
(A)idr
(A)
Tem
ps (s
)
idqr
f3(t) et f
4(t)
0 0.2 0.4 0.6 0.8 1-200
-150
-100
-50
0
50
100
150
200
Temps(s)
Cou
rant
(A
)
idr
iqr
défaut f3(t)
défaut f4(t)
-200-100
0100
200
-200-100
0100
2000
0.2
0.4
0.6
0.8
1
iqs
(A)ids
(A)
Tem
ps
(s)
idqs
0 0.2 0.4 0.6 0.8 1-200
-150
-100
-50
0
50
100
150
200
Temps(s)
Co
ura
nt
(A)
ids
iqs
Fig -7- Les courants du rotor et du stator après un défaut de creux de tension de 80 % et un glissement de -0.2
44

Simulation en présence de défauts
0 0.2 0.4 0.6 0.8 1-20
0
20
Temps (s)
r1
0 0.2 0.4 0.6 0.8 1
-50
0
50
Temps (s)
r2
0 0.2 0.4 0.6 0.8 1
-20
0
20
40
Temps (s)
r3
0 0.2 0.4 0.6 0.8 1-40
-20
0
20
40
Temps (s)
r4
Fig -8- Résidus de multi-observateur en présence de défauts
les résidus obtenus avec le générateur des résidus en présence des défauts :
45
Les résultats
LMI

Conclusion & Perspectives
Hakim OUYESSAAD
Quels est l’apport et le devenir de ces approches ?

L’approche multimodèle nous a permis d’éviter les inconvénients des approches par linéarisation habituellement utilisées.
Les conditions de stabilité ont été résolues avec l’utilisation d’une fonction quadratique de Lyapunov.
Conception d’un multi-observateurs à entrées inconnues, pour la détection et la localisation des défauts capteurs de courant dans la génératrice.
L’utilisation du formalisme H∞afin de concevoir un générateur de résidus permettant la détection des défauts lors d’un creux de tension provenant du réseau.
Perspectives L’utilisation des signaux réels de la génératrice pour le diagnostic, avec la mise en place
d’un banc d’essais composé d’une génératrice et d’un simulateur temps-réel.
La conception d’observateurs en utilisant des variables de prémisse non mesurables pour l’estimation simultanée de l’état et des fonctions d’activation,
L’utilisation du modèle de la génératrice avec la variation de 𝜔𝑠(𝑡), pour avoir un multimodèle à quatre règles floues.
La résolution du problème qui est due à l’intéracation entre les sorties du système.
Conclusion & Perspectives Conclusion
47

Merci de votre attention

Annexes

Hakim OUYESSAAD
50
-90% -80%
-40%
0% 60% 80%
100%
0,0107Ω 0,0856Ω 0,0535Ω 0,107Ω 0.1712 Ω 0.1926Ω 0.2140Ω
Variation de la résistance Rr
Série1
Simulation pour un fonctionnement avec une variation ΔRr (augmentation) de la résistance Rr
𝐴 𝜔𝑠 𝑡 , 𝜔𝑟 𝑡 =
−𝑅𝑠
𝜎𝐿𝑠𝑃 𝜔𝑠 𝑡 +
𝐿ℎ2
𝜎𝐿𝑠𝐿𝑟𝜔𝑟 𝑡
𝐿ℎ(𝑅𝑟+𝛥𝑅𝑟)
𝜎𝐿𝑟𝐿𝑠
𝑃𝐿ℎ𝜎𝐿𝑠
𝜔𝑟 𝑡
−𝑃 𝜔𝑠 𝑡 +𝐿ℎ2
𝜎𝐿𝑠𝐿𝑟𝜔𝑟 𝑡
−𝑅𝑠
𝜎𝐿𝑠
−𝑃𝐿ℎ𝜎𝐿𝑠
𝜔𝑟 𝑡𝐿ℎ(𝑅𝑟+𝛥𝑅𝑟)
𝜎𝐿𝑟𝐿𝑠𝐿ℎ𝑅𝑠
𝜎𝐿𝑟𝐿𝑠
−𝑃𝐿ℎ𝜎𝐿𝑟
𝜔𝑟 𝑡−(𝑅𝑟+𝛥𝑅𝑟)
𝜎𝐿𝑟𝑃 𝜔𝑠 𝑡 −
𝜔𝑟 𝑡
𝜎
𝑃𝐿ℎ𝜎𝐿𝑟
𝜔𝑟 𝑡𝐿ℎ𝑅𝑠
𝜎𝐿𝑟𝐿𝑠−𝑃 𝜔𝑠 𝑡 −
𝜔𝑟 𝑡
𝜎
−(𝑅𝑟+𝛥𝑅𝑟)
𝜎𝐿𝑟

21/03/2014 Hakim OUYESSAAD
0 200 400 600 800 1000 1200 1400 1600 1800 2000-3
-2
-1
0
1
2
3
Temps(Ms)
Cou
rant
A
résidu idr-Rr=0.2140 ohm (100%)
résidu idr-Rr= 0.1926 ohm 80%)
résidu idr-Rr=0.1712 ohm (60%)
Évolution des résidus pour les trois résistances Rr (pour un fonctionnement à chaud)
0 500 1000 1500 2000
-1
-0.5
0
0.5
1
1.5
Det
ecti
on
Time (Ms)
0 500 1000 1500 2000
-1
-0.5
0
0.5
1
1.5
Det
ecti
on
Time (Ms)
0 500 1000 1500 2000
-1
-0.5
0
0.5
1
1.5
Det
ecti
on
Time (Ms)
Det Rr= 60% Det Rr= 80% Det Rr= 100%
Détection et localisation de défauts pour τ = 3 %
51

Modèle triphasé de la GADA
Figure - Représentation schématique d’une machine asynchrone à double alimentations
Les équations des tensions statoriques et rotoriques sont représentées comme suit :
𝑉𝑠 𝑎𝑏𝑐 = 𝑅𝑠 𝐼𝑠 𝑎𝑏𝑐 +𝑑 ∅𝑠 𝑎𝑏𝑐
𝑑𝑡
𝑉𝑟 𝐴𝐵𝐶 = 𝑅𝑟 𝐼𝑟 𝐴𝐵𝐶 +𝑑 ∅𝑟 𝐴𝐵𝐶
𝑑𝑡
Hakim OUYESSAAD
52

Modèle diphasé de la machine asynchrone dans le repère de Park (d, q)
Représentation de la GADA après la transformation de Park
𝑝 𝜃 = 23
cos (𝜃) cos (𝜃 − 2𝜋/3) cos (𝜃 + 2𝜋/3)−sin(𝜃) −sin(𝜃 − 2𝜋/3) −sin (𝜃 + 2𝜋/3)
1 2 1 2 1 2
Hakim OUYESSAAD
53

Paramètres Valeurs Désignation
GADA
22 kw
400 V
41 A
255 V
53 A
Puissance nominale
Tension du stator
Courant statorique
Tension au rotor
Courant rotorique
Rs,Rr 0.1315 Ω; 0.1070 Ω Résistances du stator et du rotor
Lh 46.8 mH Inductance mutuelle.
Ls, Lr 46.8 mH;46.8 mH Inductance du stator et du rotor
P 1 Nombre de paires de pôles
Tableau - Paramètres de la génératrice asynchrone [Rot, 09]
Hakim OUYESSAAD
54

21/03/2014 Hakim OUYESSAAD 55
𝐴1 = 103
−0.066 6.795 7.471 6.944−6.795 −0.066 −6.944 7.4710.065 −6.944 −7.635 −7.0956.944 0.065 −7.095 −7.635
𝐴2 = 103
−0.066 0 7.471 00 −0.066 0 7.471
0.065 0 −7.6351 00 0.065 0 −7.635
Les résultats suivants sont obtenus à l’aide de la boite à outils Matlab LMI Toolbox. Avec une valeur de 𝜸 = 𝟏. 𝟑𝟏𝟔𝟔 , on obtient les matrices suivantes :
𝑃1 =
1.316 −0 0 −0 0 1.316 −0 0 0 −0 0.731 −0.581−0 0 −0.5855 0.731
𝑃2 =
0.731 0 0 00 0.731 0 00 0 0.731 00 0 0 0.731
𝐿1 = 104
−0.066 −0.0002 0.219 0.5380.0002 −0.066 −0.545 0.5313.305 −0.626 −2.246 1.1873.639 0.455 −1.186 0.720
𝐿2 = 104
−0.066 −0 0.375 −0.0010 −0.066 −0.001 0.375
1.871 1.494 −0.650 −0.0891.494 1.871 0.090 −0.875