dÉfinition d’actionneurs À dÉbattement … · À rÉguler le debit du comburant d’un ... le...
TRANSCRIPT
1
Conférence EF 2009 UTC, Compiègne, 24-25 Septembre 2009
DÉFINITION D’ACTIONNEURS À DÉBATTEMENT LIMITÉ DESTINÉS À RÉGULER LE DEBIT DU COMBURANT D’UN MOTEUR
THERMIQUE
Christophe GUTFRIND, Pierre VIDAL, Jean-Claude VANNIER, Daniel SADARNAC Ecole SUPELEC, Département Energie, 1 rue Joliot-Curie, 91192 Gif sur Yvette, France
ELECTRICFIL Automotive, Service Recherche Avancée, 77 allée des Grandes Combes, 01708 Miribel, France
[email protected], [email protected], [email protected], [email protected]
Résumé
L’objectif de cet article est de présenter des travaux de développement d’actionneurs à débattement limité destinés à la régulation du comburant d’un moteur à combustion interne. Les performances de ces actionneurs sont spécifiées pour un encombrement réduit, un couple donné sur un débattement angulaire de 0 à 90° pour une température donnée et d’une faible consommation électrique. Deux structures d’actionneurs à aimants permanents et à entraînement direct sont comparées : l’une à flux axial, et l’autre à flux radial. Des modèles d’actionnements sont développés de manière analytique et d’une optimisation et une pré-étude par la méthode des éléments finis (MEF) avec FLUX 2D. Mots Clés : actionneur, débattement limité, machine électrique, consommation, optimisation, modélisation.
Abstract The objective of this article is to present development works of limited motion actuators, intended to the combustive regulation of an internal combustion engine. The performances are specified on reduced size for a minimal torque and an angular motion from 0 to 90 °, for a high temperature working condition and a low electric consumption. Two actuators with permanent magnets and direct drive are compared: one in axial magnet flux, and the other in radial magnet flux. We develop analytical models followed by an optimization and a pre-study based on finite elements method (FEM) with FLUX-2D. Keywords: actuator, limited motion, electrical machine, power consumption, optimisation, modelling.
Contexte de l’étude
Avec la sévérité des normes européennes [1] appliquées aux constructeurs automobiles afin de réduire les émissions polluantes et de gaz à effet de serre des véhicules conçus, de nouvelles conceptions de moteurs à combustions internes amènent de nouveaux besoins dans la régulation de la composition du comburant comme décrit dans [2] et [3].
Dans les techniques de dépollutions des moteurs thermiques, les deux voies de recherche sont soit de réduire les émissions polluantes à la source de la combustion via par exemple des systèmes de recyclages des gaz d’échappement (appelé EGR) et/ou de post-traiter les émissions du moteur via, par exemple, les catalyseurs et les filtres de piégeage, type filtre à particules [4].
Le moteur diesel moderne est bien placé sur le plan de la consommation de carburant mais
les nouvelles normes tendent à le désavantager en ce qui concerne les émissions d’oxydes d’azote (Nox) et les particules. Dernièrement, les systèmes d’injections ont fait évoluer significativement les performances de ces moteurs. Les besoins de réguler quantitativement et qualitativement le comburant doivent évoluer et ceci passe par des mécanismes comportant les systèmes de conversion d’énergie électrique en énergie mécanique pour réguler le débit d’air frais et/ou d’ EGR.
Suivant l’état de fonctionnement du moteur, le comburant est composé d’un certain taux d’EGR par rapport à l’air frais pour un état gazeux d’une certaine température et de pression. Cette composition est gérée par le calculateur via des capteurs et des actionneurs disposés sur le circuit d’air, parfois appelé boucle d’air (les gaz d’échappement revenant à l’admission)
ISBN 978-2-913923-30-0
2
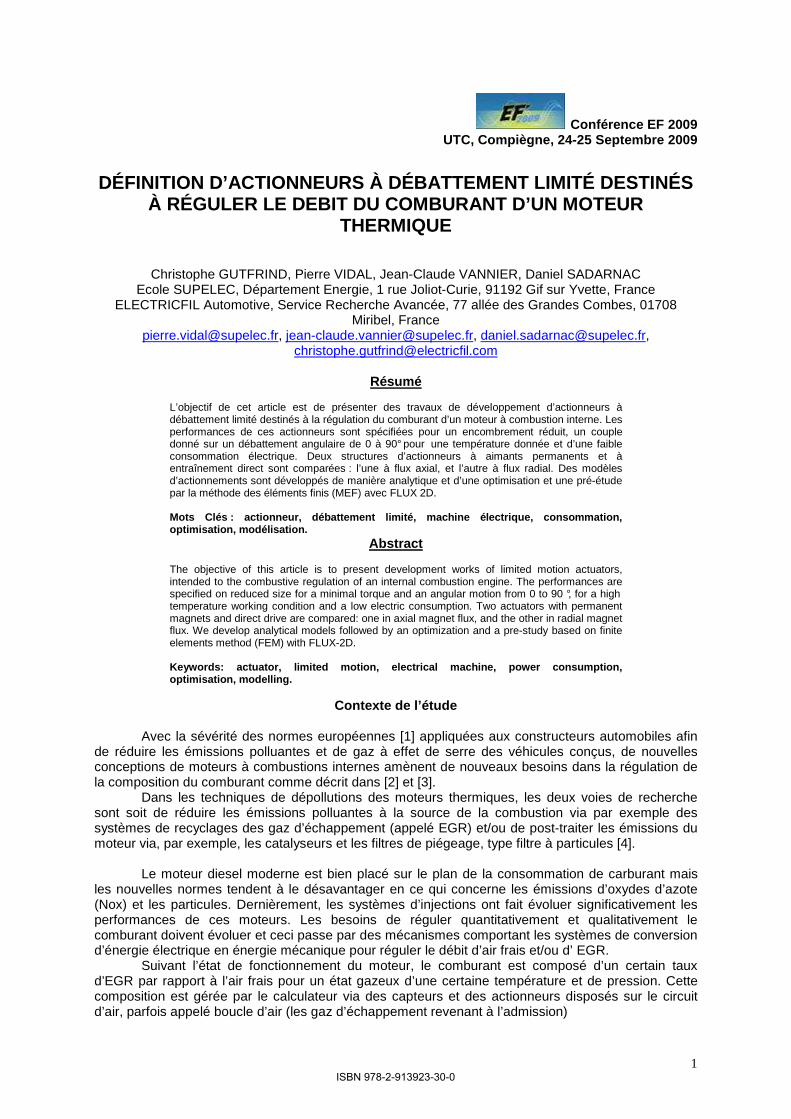
Figure 1 : Schéma d’un circuit d’air d’un moteur Diesel
Suite à un état de l’art des différents actionneurs régulant les débits d’écoulement du
comburant, plusieurs structures sont recensées qui utilisent diverses conversions d’énergies. A l’origine, le déplacement de volet ou de vanne s’effectuait soit par câble relié à une pédale soit par dépression en utilisant l’air aspiré des cylindres via la pipe d’admission ou par l’intermédiaire d’une pompe à dépression pour les moteurs diesel. Depuis une dizaine d’années, des structures électriques existent, et avec le temps ces mécanismes se sont affinés. Pour différentes architectures de boucle d’air, le nombre d’actionneurs électriques peut varier entre 3 et 8 actionneurs voire plus ce qui peut demander une gestion électrique optimisée de l’actionneur lui-même et de l’ensemble du système de gestion du circuit d’air.
Pour réaliser des mouvements rotatifs, l’étude isole deux topologies électriques: une topologie
à entraînement indirect composé d’un moteur à courant continu et d’un réducteur à engrenage parallèle, et d’une topologie à entraînement direct via un moteur couple.
Si l’on exprime Pe la puissance électrique comme puissance d’entrée et Ps la puissance
mécanique comme puissance de sortie en bout d’arbre et η le rendement, eees CPP ωηη ⋅⋅=⋅= .
Pour atteindre la puissance de sortie désirée, soit on augmente le couple et on diminue en vitesse de rotation d’entrée (cas de l’entrainement direct), soit on augmente la vitesse de rotation d’entrée, et on diminue le couple (cas de l’entrainement indirect). Le moteur à courant continu associé à un réducteur et le moteur « couple » à entrainement direct sont donc deux structures complémentaires.
Le mécanisme à motoréducteur possède des effets non linéaires néfastes à la précision de la
position (jeu entre-dents, jeu et efforts dans un palier, frottements de Coulomb, hystérésis de fonctionnement entre la phase d’ouverture et de fermeture du volet comme décrit dans [5]. Pour s’affranchir de ces effets non linéaires liés à la structure mécanique, le choix se porte sur des actionneurs à entraînement direct.
Les travaux nécessitent plusieurs compétences et divers modèles pour définir un actionneur: modèle géométrique, modèle mécanique, modèle thermique, modèle de comportement de matériaux, modèle électromagnétique, modèle électrique et d’automatique pour réguler la position du rotor.
Cet article propose de comparer deux topologies de conversion d’énergie par le modèle électromagnétique pour un actionneur à entraînement direct et donc de conclure sur une topologie qui répond au mieux aux besoins.
Caractérisation des actionneurs Pour caractériser ces actionneurs, l’objectif principal est d’obtenir un couple supérieur à 0,2
N.m pour un encombrement limité à environ 50mm3.
Acoustique FAP DOC
intercooler P1,T1,βegr1
P3,T3,λ3
P5,T5, βegr5
P2,T2, βegr2
P4,T4,λ4 Pfap,Tfap
Patmo,Tatmo,λ
Patmo,Tatmo,λ
Wastegate
TGV
PM
EGR HP
EGR LP
VVT
Tumble Swirl
By-pass
By-pass
Admission
Echappement
Filtre à air
ISBN 978-2-913923-30-0
3
A partir de [6], les premières structures intéressantes à entraînement direct se portent soit sur une machine à aimant permanent, soit sur une machine à réluctance variable, soit sur une machine à rotor bobiné. A puissance égale, l’actionneur à aimant permanent est plus petit qu'une machine à rotor bobiné et les machines à réluctances variables. Pour des performances équivalentes, les machines à aimants permanent sont préférées. Les matériaux magnétiques nécessaires aux rotors aimantés sont plus coûteux que l'acier et le cuivre nécessaires aux rotors bobinés.
Il existe d’autres exigences telles que le poids, la fiabilité et la tenue en température des aimants car ces actionneurs sont placés dans un environnement sévère.
Pour les aimants permanents, l’utilisation des NdFeB est de plus en plus répandue pour un faible coût. Néanmoins, de part ses caractéristiques de tenue en température, le SmCo paraît plus avantageux dans l’utilisation préconisée, comme décrit dans [7].
Enfin, deux principes électromagnétiques sont étudiés : l’un à flux axial, l’autre à flux radial.
Les performances de ces modèles seront modélisées, simulées et comparées.
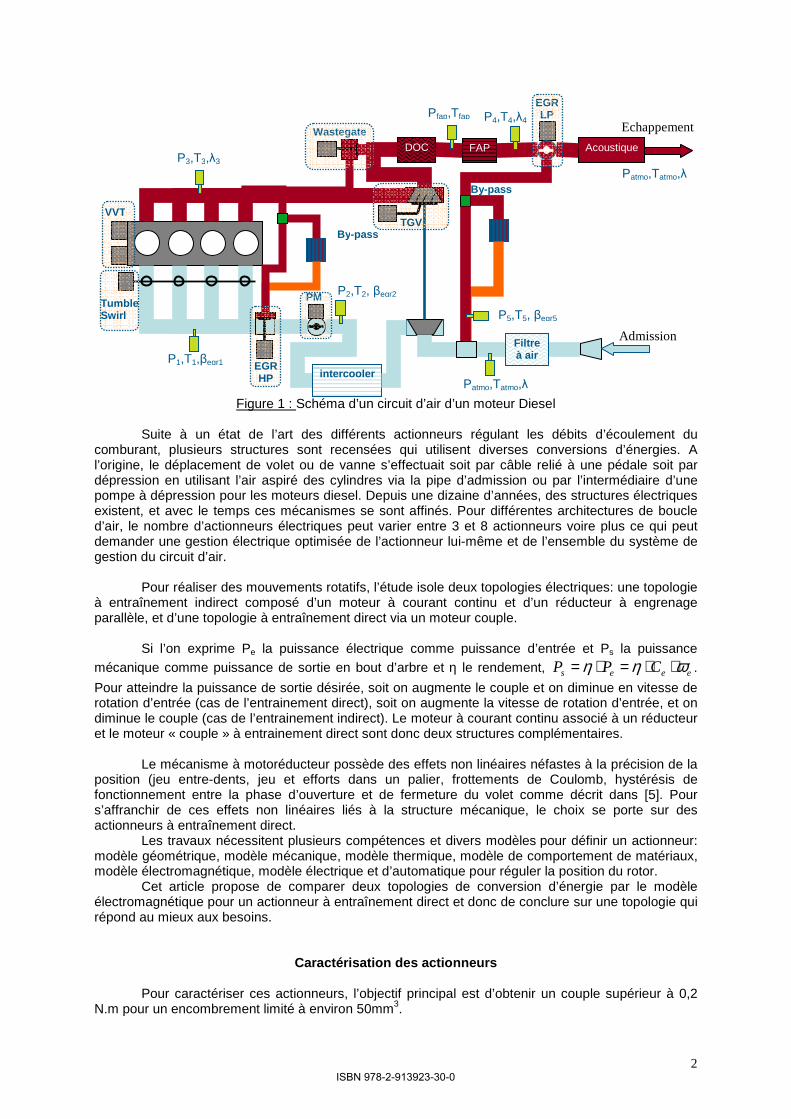
Deux modèles analytiques A/ Calcul de l’induction et du couple de l’actionneur à flux radial A partir d’un modèle avec un rotor à aimant permanent et une paire d’encoches au stator, le
but est d’obtenir un débattement minimum de 90° ave c un couple constant sur cette plage de fonctionnement.
Le calcul de l’induction dans l’entrefer est un des points essentiels de la modélisation. C’est par ce calcul que l’expression du flux et du couple est déterminé. Le calcul de l’induction s’exprime via le théorème d’Ampère sur le contour exposé en Fig.2. Ce chemin prend en compte la contribution des aimants.
La force magnétomotrice est donnée par la relation : Infmm ⋅= avec n le nombre de spires dans la paire d’encoches
et I le courant dans le conducteur. Pour déterminer l’induction traversant l’entrefer, nous
appliquons le théorème d’Ampère sur le contour suivant : le flux traverse deux fois l’entrefer et les deux aimants. Dans notre cas, l’expression devient :
InfmmeHeH eaa .)(2 ==⋅+⋅ (1)
avec Ha le champ dans l’aimant, He le champ dans
l’entrefer, ea l’épaisseur de l’aimant, e l’épaisseur de l’entrefer.
La loi de conservation du flux est appliquée pour les surfaces que le flux traverse :
eeaa SBSB ⋅=⋅ d’où eaea
eea kB
S
SBB ⋅=⋅= (2)
avec Se la demi-surface de révolution au stator et Sa la demi-surface de révolution à la
surface de l’aimant. Soit kea le rapport de ces surfaces eaa
e kS
S = .
La caractéristique de l’aimant est donnée par la relation : arra HBB ⋅⋅+= µµ0 . Le champ s’écrit :
r
raa
BBH
µµ ⋅−=
0
(3)
avec Ha le champ dans l’aimant, µ0 perméabilité absolue , µr perméabilité relatif de l’aimant, Br valeur de l’induction rémanente de l’aimant.
A
A
θ
Figure 2a : Coupe de l’actionneur à flux radial
0° 180° stator
rotor
e
Figure 2b : Trajet du flux pour l’actionneur à flux radial développé
ea
ISBN 978-2-913923-30-0
4
Le champ dans l’entrefer est défini par : 0µe
e
BH = (4)
A partir des équations (1), (2), (3) et (4), on obtient l’expression finale de l’induction dans l’entrefer devient :
)(
2
)()( 0 θδ
µ
µθβµ
θ ⋅
⋅+⋅
⋅⋅+⋅⋅+⋅
⋅=
a
aeaaaea
are
eke
In
eek
eBB (5)
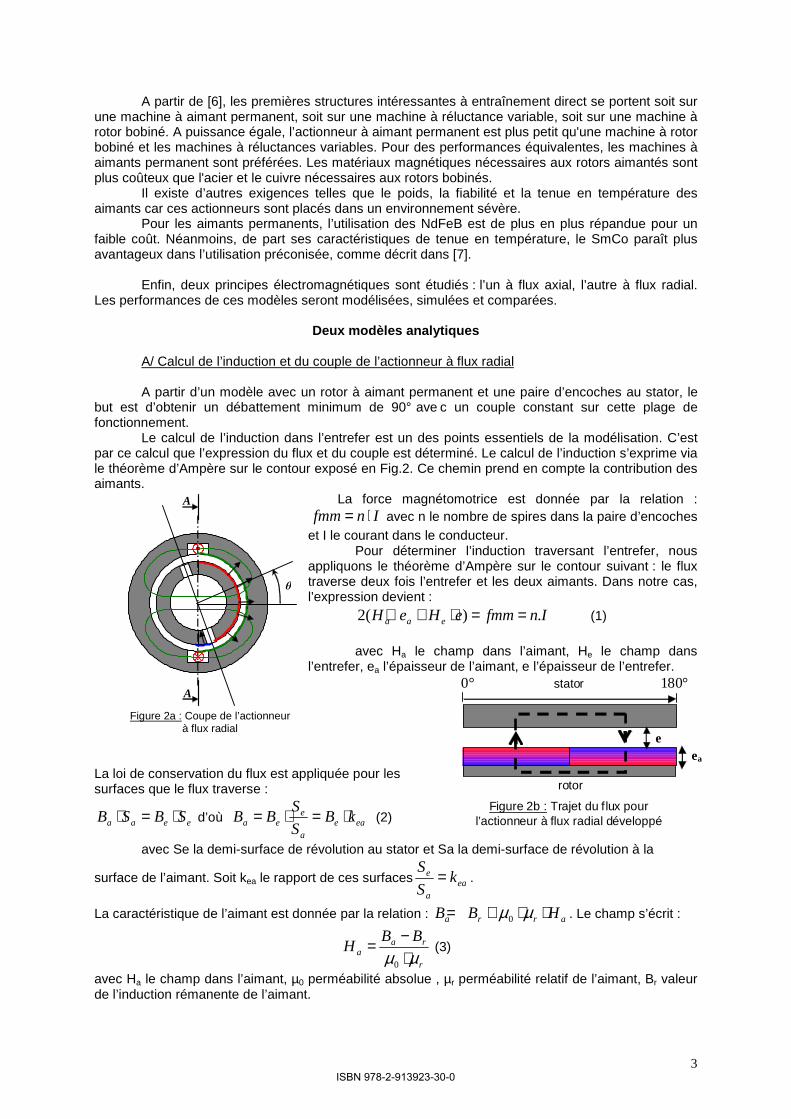
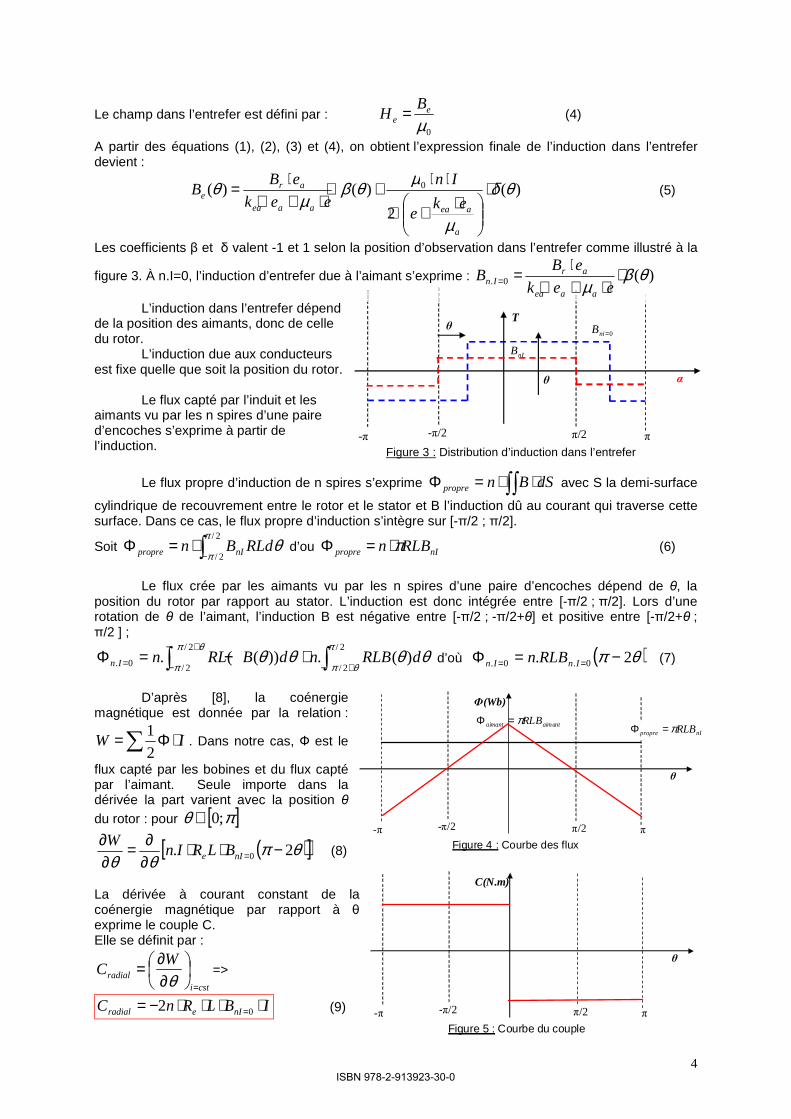
Les coefficients β et δ valent -1 et 1 selon la position d’observation dans l’entrefer comme illustré à la
figure 3. À n.I=0, l’induction d’entrefer due à l’aimant s’exprime : )(0. θβµ
⋅⋅+⋅
⋅== eek
eBB
aaea
arIn
L’induction dans l’entrefer dépend de la position des aimants, donc de celle du rotor.
L’induction due aux conducteurs est fixe quelle que soit la position du rotor.
Le flux capté par l’induit et les
aimants vu par les n spires d’une paire d’encoches s’exprime à partir de l’induction.
Le flux propre d’induction de n spires s’exprime ∫∫ ⋅⋅=Φ dSBnpropre avec S la demi-surface
cylindrique de recouvrement entre le rotor et le stator et B l’induction dû au courant qui traverse cette surface. Dans ce cas, le flux propre d’induction s’intègre sur [-π/2 ; π/2].
Soit ∫−⋅=Φ2/
2/
π
πθRLdBn nIpropre d’ou nIpropre RLBn π⋅=Φ (6)
Le flux crée par les aimants vu par les n spires d’une paire d’encoches dépend de θ, la
position du rotor par rapport au stator. L’induction est donc intégrée entre [-π/2 ; π/2]. Lors d’une rotation de θ de l’aimant, l’induction B est négative entre [-π/2 ; -π/2+θ] et positive entre [-π/2+θ ; π/2 ] ;
∫∫ +−
+−
−= +−=Φ2/
2/
2/
2/0. )(.))((.π
θπ
θπ
πθθθθ dRLBndBRLnIn d’où ( )θπ 2. 0.0. −=Φ == InIn RLBn (7)
D’après [8], la coénergie
magnétique est donnée par la relation :
∑ ⋅Φ= IW2
1. Dans notre cas, Ф est le
flux capté par les bobines et du flux capté par l’aimant. Seule importe dans la dérivée la part varient avec la position θ du rotor : pour [ ]πθ ;0∈
( )[ ]θπθθ
2. 0 −⋅⋅∂∂=
∂∂
=nIe BLRInW
(8)
La dérivée à courant constant de la coénergie magnétique par rapport à θ exprime le couple C. Elle se définit par :
cstiradial
WC
=
∂∂=
θ=>
IBLRnC nIeradial ⋅⋅⋅⋅−= =02 (9)
-π/2 π/2 -π π
α
nIB
0=niB
Figure 3 : Distribution d’induction dans l’entrefer
T θ
θ
-π/2 π/2 -π π
θ
nIpropre RLBπ=Φ
Ф(Wb)
aimantaimant RLBπ=Φ
Figure 4 : Courbe des flux
-π/2 π/2 -π π
θ
C(N.m))
Figure 5 : Courbe du couple
ISBN 978-2-913923-30-0
5
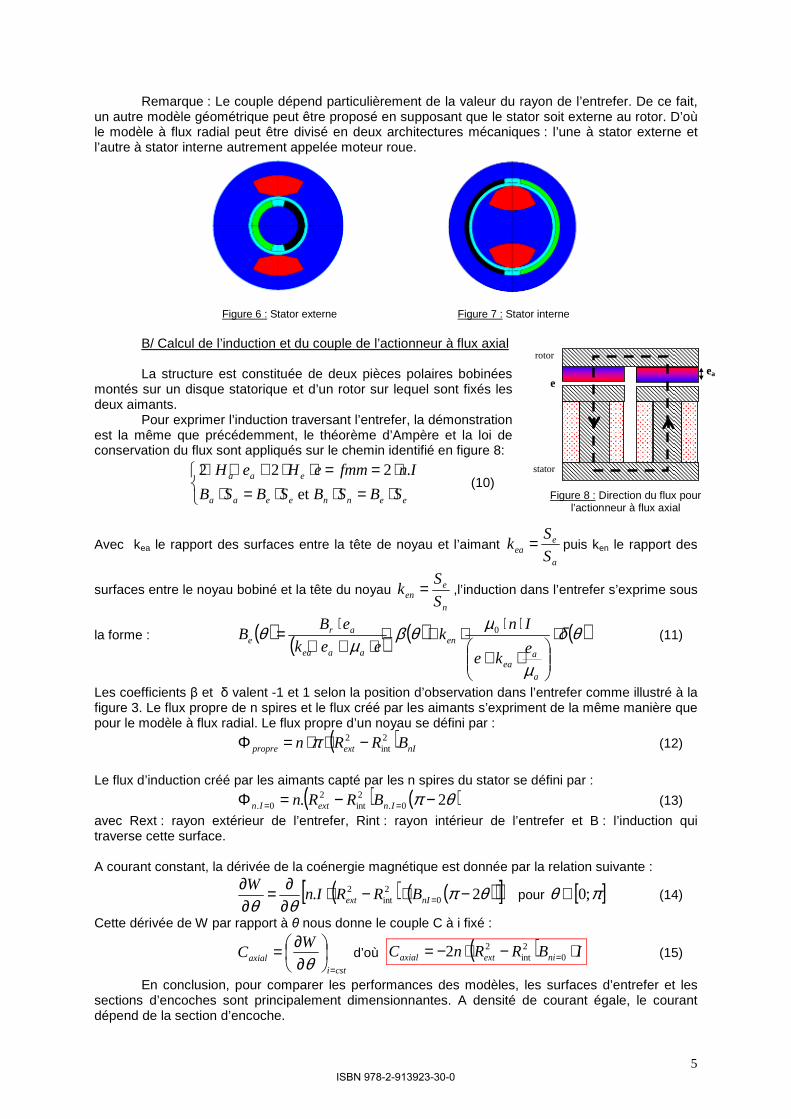
Remarque : Le couple dépend particulièrement de la valeur du rayon de l’entrefer. De ce fait, un autre modèle géométrique peut être proposé en supposant que le stator soit externe au rotor. D’où le modèle à flux radial peut être divisé en deux architectures mécaniques : l’une à stator externe et l’autre à stator interne autrement appelée moteur roue.
Figure 6 : Stator externe Figure 7 : Stator interne
B/ Calcul de l’induction et du couple de l’actionneur à flux axial
La structure est constituée de deux pièces polaires bobinées
montés sur un disque statorique et d’un rotor sur lequel sont fixés les deux aimants.
Pour exprimer l’induction traversant l’entrefer, la démonstration est la même que précédemment, le théorème d’Ampère et la loi de conservation du flux sont appliqués sur le chemin identifié en figure 8:
⋅=⋅⋅=⋅⋅==⋅⋅+⋅⋅
eenneeaa
eaa
SBSBSBSB
InfmmeHeH
et
.222 (10)
Avec kea le rapport des surfaces entre la tête de noyau et l’aimant a
eea S
Sk = puis ken le rapport des
surfaces entre le noyau bobiné et la tête du noyau n
een S
Sk = ,l’induction dans l’entrefer s’exprime sous
la forme : ( ) ( ) ( ) ( )θδ
µ
µθβµ
θ ⋅
⋅+
⋅⋅⋅+⋅⋅+⋅
⋅=
a
aea
enaaea
are
eke
Ink
eek
eBB 0 (11)
Les coefficients β et δ valent -1 et 1 selon la position d’observation dans l’entrefer comme illustré à la figure 3. Le flux propre de n spires et le flux créé par les aimants s’expriment de la même manière que pour le modèle à flux radial. Le flux propre d’un noyau se défini par :
( ) nIextpropre BRRn 2int
2 −⋅⋅=Φ π (12)
Le flux d’induction créé par les aimants capté par les n spires du stator se défini par :
( ) ( )θπ 2. 0.2int
20. −−=Φ == InextIn BRRn (13)
avec Rext : rayon extérieur de l’entrefer, Rint : rayon intérieur de l’entrefer et B : l’induction qui traverse cette surface. A courant constant, la dérivée de la coénergie magnétique est donnée par la relation suivante :
( ) ( )( )[ ]θπθθ
2. 02int
2 −⋅−⋅∂∂=
∂∂
=nIext BRRInW
pour [ ]πθ ;0∈ (14)
Cette dérivée de W par rapport à θ nous donne le couple C à i fixé :
cstiaxial
WC
=
∂∂=
θ d’où ( ) IBRRnC niextaxial ⋅−⋅−= =0
2int
22 (15)
En conclusion, pour comparer les performances des modèles, les surfaces d’entrefer et les sections d’encoches sont principalement dimensionnantes. A densité de courant égale, le courant dépend de la section d’encoche.
stator
e ea
Figure 8 : Direction du flux pour l’actionneur à flux axial
rotor
ISBN 978-2-913923-30-0
6
Paramétrages et optimisation Les principales contraintes sont surtout liées à l’encombrement, la tenue en température et au
coût. Pour le moment, la contrainte d’encombrement est prise en compte et elle est conseillée pour un volume de 50 mm3 pour obtenir un couple supérieur à 0,2 N.m jusqu’ à l’ordre du newton-mètre et ceci pour une plage de couple constant de 0 à 90° de rot ation.
Le but de cette optimisation est de modéliser et de comparer les performances de chaque actionneur à partir de paramètres dimensionnants et ainsi de préparer la simulation sous le logiciel Flux 2D.
Une méthode d’optimisation continue est utilisée pour calculer les paramètres de ces modèles d’actionneurs. L’algorithme utilisé est un algorithme déterministe du type Sequential Quadratic Programming (SQP) issu de la boite à outil d’optimisation de Matlab®. Ce type d’algorithme impose l’utilisation de fonctions objectifs et de contraintes continues et dérivables.
La fonction « objective » est de maximiser au mieux le couple à densité de courant fixée dans la section d’encoche. L’association des contraintes et des équations analytiques précédentes définit les modèles d’actionnement par rapport aux problèmes d’optimisation.
Les principales variables d’optimisation sont : - la géométrie de l’aimant : son épaisseur et son angle d’ouverture, - l’induction rémanente des aimants, - l’épaisseur de l’entrefer, - la forme de l’encoche au stator : sa hauteur et son angle d’ouverture,
Les paramètres fixes sont déterminés pour un encombrement réduit d’un volume total de 50,26 mm3 pour chaque actionneur.
Les contraintes sont surtout liées à la saturation du matériau au stator et au rotor. Certaines
contraintes géométriques telles que l’épaisseur d’aimant sont dimensionnantes pour éviter la désaimantation des aimants au rotor.
Remarque : Dans le calcul du flux, les flux de fuites dûs à la forme des encoches sont intégrés au calcul du flux [9].
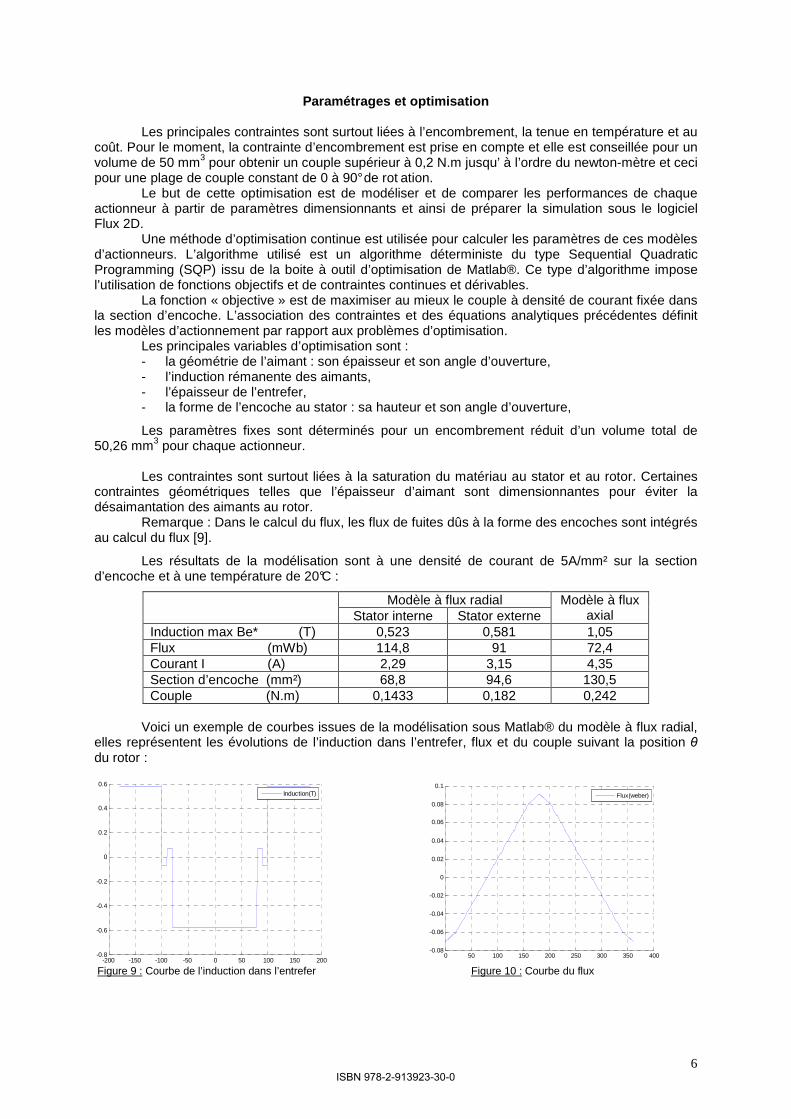
Les résultats de la modélisation sont à une densité de courant de 5A/mm² sur la section d’encoche et à une température de 20°C :
Modèle à flux radial Stator interne Stator externe
Modèle à flux axial
Induction max Be* (T) 0,523 0,581 1,05 Flux (mWb) 114,8 91 72,4 Courant I (A) 2,29 3,15 4,35 Section d’encoche (mm²) 68,8 94,6 130,5 Couple (N.m) 0,1433 0,182 0,242
Voici un exemple de courbes issues de la modélisation sous Matlab® du modèle à flux radial,
elles représentent les évolutions de l’induction dans l’entrefer, flux et du couple suivant la position θ du rotor :
-200 -150 -100 -50 0 50 100 150 200-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Induction(T)
0 50 100 150 200 250 300 350 400-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Flux(weber)
Figure 9 : Courbe de l’induction dans l’entrefer Figure 10 : Courbe du flux
ISBN 978-2-913923-30-0
7
-200 -150 -100 -50 0 50 100 150 200-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Flux
dFlux
C
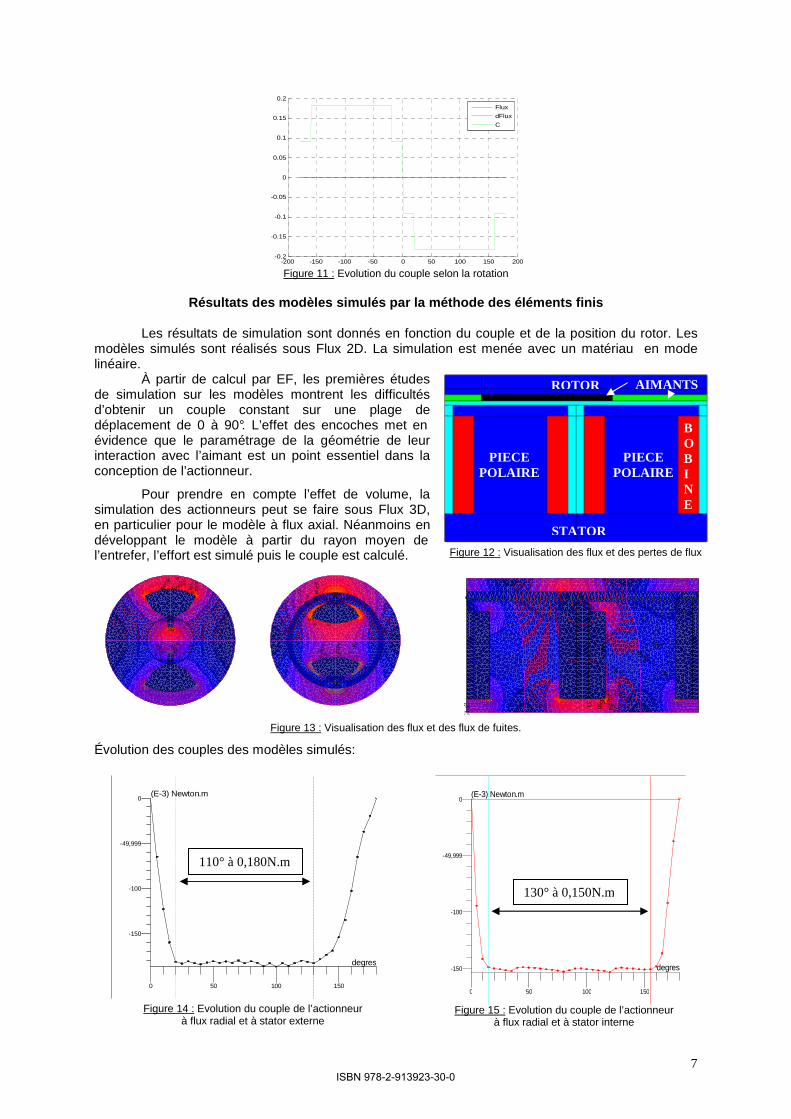
Figure 11 : Evolution du couple selon la rotation
Résultats des modèles simulés par la méthode des éléments finis
Les résultats de simulation sont donnés en fonction du couple et de la position du rotor. Les
modèles simulés sont réalisés sous Flux 2D. La simulation est menée avec un matériau en mode linéaire.
À partir de calcul par EF, les premières études de simulation sur les modèles montrent les difficultés d’obtenir un couple constant sur une plage de déplacement de 0 à 90°. L’effet des encoches met en évidence que le paramétrage de la géométrie de leur interaction avec l’aimant est un point essentiel dans la conception de l’actionneur.
Pour prendre en compte l’effet de volume, la simulation des actionneurs peut se faire sous Flux 3D, en particulier pour le modèle à flux axial. Néanmoins en développant le modèle à partir du rayon moyen de l’entrefer, l’effort est simulé puis le couple est calculé.
12
3
4
5
67
8
910
11
12
131415
16
1718
192021 222324 252627 28
2930
31 3233
34 3536
37 3839
404142
43444546 4748
4950
5152 53
5455
1
2
3
4 56
7 8 91011
1213 1415 16171819
2021 2223 2425 26 27
28
29
30
31
32
33
34
35
36
37
3839
40
41
42
43
44
45
46
47
48
49
50
51
52
53
5455
Figure 13 : Visualisation des flux et des flux de fuites.
Évolution des couples des modèles simulés:
-150
-100
-49,999
0
0 50 100 150
degres
(E-3) Newton.m
-150
-100
-49,999
0
0 50 100 150
degres
(E-3) Newton.m
130° à 0,150N.m
Figure 15 : Evolution du couple de l’actionneur à flux radial et à stator interne
Figure 14 : Evolution du couple de l’actionneur à flux radial et à stator externe
STATOR
PIECE POLAIRE
PIECE POLAIRE
ROTOR
BOB I NE
AIMANTS
Figure 12 : Visualisation des flux et des pertes de flux
110° à 0,180N.m
12
34
5
6
78
9
1011
1213
14
15
16
17
18
1920
21
2223
24
2526
2728
29
30
3132
33
3435
ISBN 978-2-913923-30-0
8
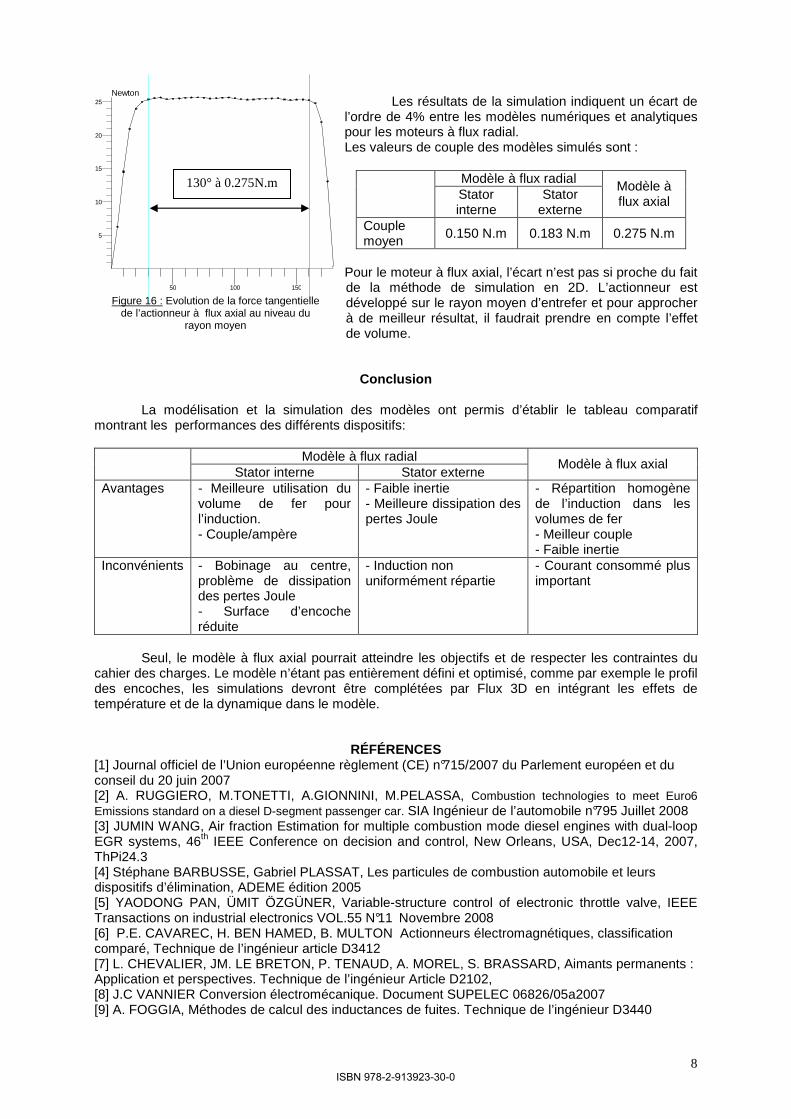
Les résultats de la simulation indiquent un écart de l’ordre de 4% entre les modèles numériques et analytiques pour les moteurs à flux radial. Les valeurs de couple des modèles simulés sont :
Modèle à flux radial Stator interne
Stator externe
Modèle à flux axial
Couple moyen
0.150 N.m 0.183 N.m 0.275 N.m
Pour le moteur à flux axial, l’écart n’est pas si proche du fait de la méthode de simulation en 2D. L’actionneur est développé sur le rayon moyen d’entrefer et pour approcher à de meilleur résultat, il faudrait prendre en compte l’effet de volume.
Conclusion
La modélisation et la simulation des modèles ont permis d’établir le tableau comparatif montrant les performances des différents dispositifs:
Modèle à flux radial
Stator interne Stator externe Modèle à flux axial
Avantages - Meilleure utilisation du volume de fer pour l’induction. - Couple/ampère
- Faible inertie - Meilleure dissipation des pertes Joule
- Répartition homogène de l’induction dans les volumes de fer - Meilleur couple - Faible inertie
Inconvénients - Bobinage au centre, problème de dissipation des pertes Joule - Surface d’encoche réduite
- Induction non uniformément répartie
- Courant consommé plus important
Seul, le modèle à flux axial pourrait atteindre les objectifs et de respecter les contraintes du
cahier des charges. Le modèle n’étant pas entièrement défini et optimisé, comme par exemple le profil des encoches, les simulations devront être complétées par Flux 3D en intégrant les effets de température et de la dynamique dans le modèle.
RÉFÉRENCES [1] Journal officiel de l’Union européenne règlement (CE) n°715/2007 du Parlement européen et du conseil du 20 juin 2007 [2] A. RUGGIERO, M.TONETTI, A.GIONNINI, M.PELASSA, Combustion technologies to meet Euro6 Emissions standard on a diesel D-segment passenger car. SIA Ingénieur de l’automobile n°795 Juillet 2008 [3] JUMIN WANG, Air fraction Estimation for multiple combustion mode diesel engines with dual-loop EGR systems, 46th IEEE Conference on decision and control, New Orleans, USA, Dec12-14, 2007, ThPi24.3 [4] Stéphane BARBUSSE, Gabriel PLASSAT, Les particules de combustion automobile et leurs dispositifs d’élimination, ADEME édition 2005 [5] YAODONG PAN, ÜMIT ÖZGÜNER, Variable-structure control of electronic throttle valve, IEEE Transactions on industrial electronics VOL.55 N°11 Novembre 2008 [6] P.E. CAVAREC, H. BEN HAMED, B. MULTON Actionneurs électromagnétiques, classification comparé, Technique de l’ingénieur article D3412 [7] L. CHEVALIER, JM. LE BRETON, P. TENAUD, A. MOREL, S. BRASSARD, Aimants permanents : Application et perspectives. Technique de l’ingénieur Article D2102, [8] J.C VANNIER Conversion électromécanique. Document SUPELEC 06826/05a2007 [9] A. FOGGIA, Méthodes de calcul des inductances de fuites. Technique de l’ingénieur D3440
Figure 16 : Evolution de la force tangentielle de l’actionneur à flux axial au niveau du
rayon moyen
5
10
15
20
25
50 100 150
Newton
130° à 0.275N.m
ISBN 978-2-913923-30-0