de quoi est composé un etx90 ?
DESCRIPTION
ETX90TRANSCRIPT

Le système réel :
Télescope ETX90PE-LNT de
Meade


L'Autostar

Carte moteur d'altitude

Carte moteur d'altitude
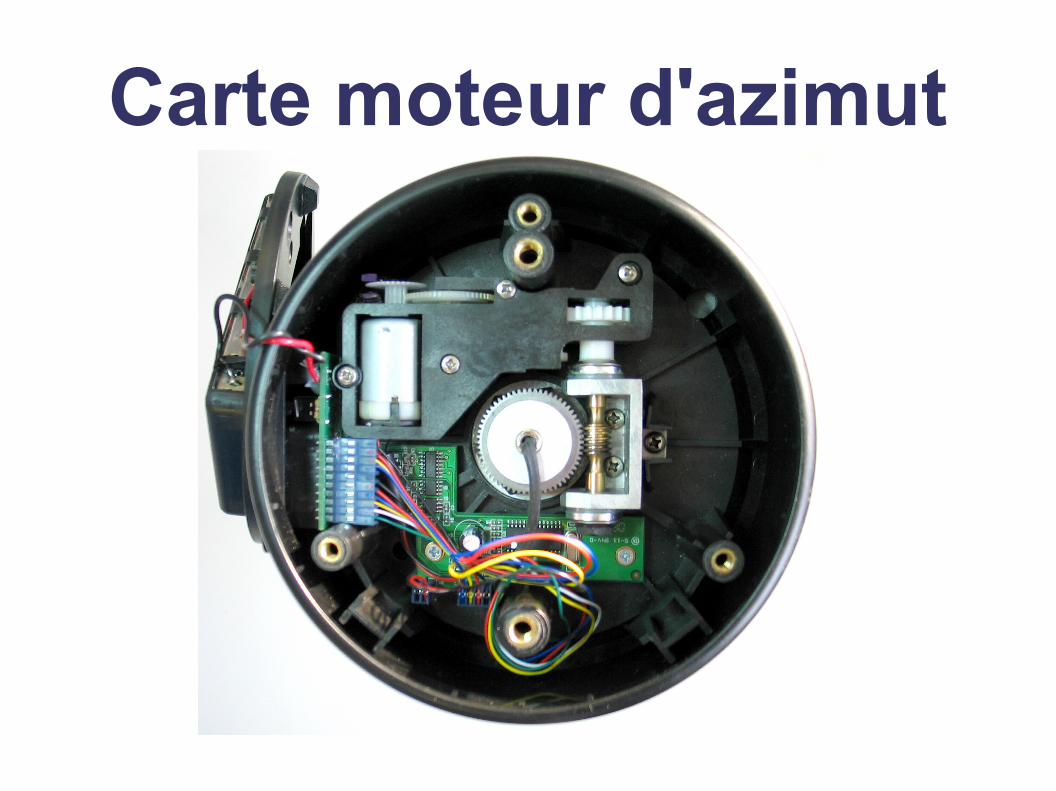
Carte moteur d'azimut

Carte moteur d'azimut

Motoréducteur

Motoréducteur

Le LNT

Le système didactisé

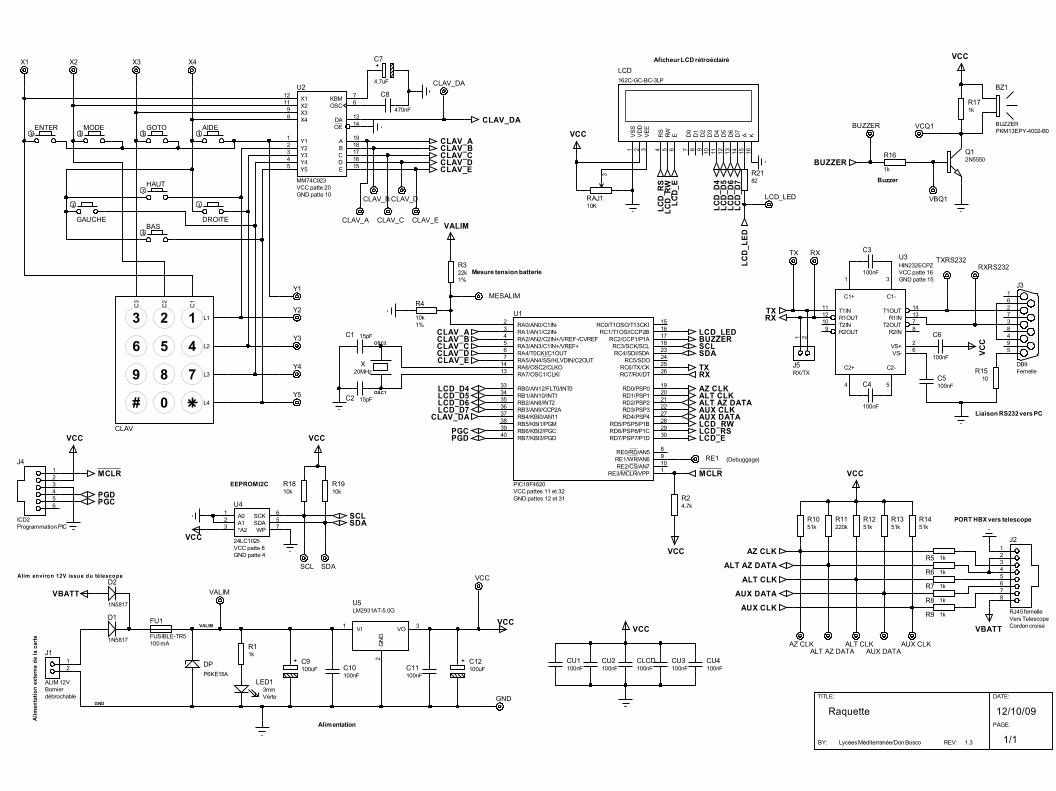
La raquette
OSC2
OSC1
GND
VALIM
TITLE:
BY:
DATE:
PAGE:
Raquette 12/10/09
Lycées Méditerranée/Don Bosco 1/1REV: 1.3
VI1 VO 3
GN
D2
U5LM2931AT-5.0G
D1
1N5817
C11100nF
C10100nF
GND
VCC
DPP6KE15A
FU1
FUSIBLE-TR5100 mA
+ C12100uF
+ C9100uF
Q12N5550
VCC
CU1100nF
VCC
VCC
123
456
789
0#
C1
C2
C3
L1
L2
L3
L4
CLAV
HAUT
BASGAUCHE DROITE
AIDEGOTOMODE
D7
14D
613
D5
12D
411
D3
10D
29
D1
8D
07
E6
RW5
RS
4
VSS
1
VD
D2
VEE
3
A15
K16
LCD162C-GC-BC-3LP
VCC
3
RAJ110K
Alimentation
ENTER
Aficheur LCD rétroéclairé
Buzzer
Liaison RS232 vers PC
T1IN11
R1OUT12
T2IN10
R2OUT9
T1OUT 14
R1IN 13
T2OUT 7
R2IN 8
C2+
4
C2-
5
C1+
1
C1-
3
VS+ 2
VS- 6
U3HIN232ECPZVCC patte 16GND patte 15
162738495
J3
DB9Femelle
C4
100nF
C3
100nF
R1510C5
100nF
C6
100nF
123456
J4
ICD2Programmation PIC
SCK 6
SDA 5
WP 7
A01
A12
*A23
U4
24LC1025VCC patte 8GND patte 4
R1910k
R1810k
VCC
EEPROM I2C
RA0/AN0/C1IN-2
RA1/AN1/C2IN-3
RA2/AN2/C2IN+/VREF-/CVREF4
RA3/AN3/C1IN+/VREF+5
RA4/T0CKI/C1OUT6
RA5/AN4/SS/HLVDIN/C2OUT7
RA6/OSC2/CLKO14
RA7/OSC1/CLKI13
RB0/AN12/FLT0/INT033
RB1/AN10/INT134
RB2/AN8/INT235
RB3/AN9/CCP2A36
RB4/KBI0/AN1137
RB5/KBI1/PGM38
RB6/KBI2/PGC39
RB7/KBI3/PGD40
RC0/T1OSO/T13CKI 15
RC1/T1OSI/CCP2B 16
RC2/CCP1/P1A 17
RC3/SCK/SCL 18
RC4/SDI/SDA 23
RC5/SDO 24
RC6/TX/CK 25
RC7/RX/DT 26
RD0/PSP0 19
RD1/PSP1 20
RD2/PSP2 21
RD3/PSP3 22
RD4/PSP4 27
RD5/PSP5/P1B 28
RD6/PSP6/P1C 29
RD7/PSP7/P1D 30
RE0/RD/AN5 8
RE1/WR/AN6 9
RE2/CS/AN7 10
RE3/MCLR/VPP 1
U1
PIC18F4620VCC pattes 11 et 32GND pattes 12 et 31
TXRX
BUZZER
BUZZER
MCLR
R2182
TXRX
CLAV_ACLAV_BCLAV_CCLAV_D
D2
1N5817
Alim environ 12V issue du télescope
Alim
enta
tion
exte
rne
de la
car
te
LED13mmVerte
R11k
CLAV_ACLAV_BCLAV_CCLAV_DCLAV_E
AZ CLKALT CLKALT AZ DATA
AUX DATAAUX CLK
SCLSDA
SCLSDA
LCD
_D4
LCD
_D5
LCD
_D6
LCD
_D7
LCD
_RS
LCD
_RW
LCD
_E
LCD_D4LCD_D5LCD_D6LCD_D7
LCD_RSLCD_RW
LCD_E
LCD
_LED
LCD_LED
MCLR
R24.7k
VCC
PGDPGC
PGCPGD
X20MHz
C1 15pF
C2 15pF
OSC 6KBM 7
DA 13
A 19
B 18
C 17
D 16
X112
X211
X39
X48
Y11
Y22
Y33
Y44
OE 14
Y55 E 15
U2
MM74C923VCC patte 20GND patte 10
CLAV_E
CLAV_DA
CLAV_DA
CU2100nF
CLCD100nF
CU3100nF
CU4100nF
+
C7
4.7uF
C8
470nF
12
J1
ALIM 12VBornierdébrochable
VALIM
VALIM
R322k1%
R4
10k1%
12345678
J2
RJ45 femelleVers TelescopeCordon croisé
R9 1k
R8 1k
R1251k
R11220k
R1051k
VCC
R1351k
R1451k
ALT AZ DATA
AZ CLK
ALT CLK
AUX DATA
AUX CLK
PORT HBX vers telescope
VBATT
R5 1k
R6 1k
R7 1k
AZ CLKALT AZ DATA
ALT CLKAUX DATA
AUX CLK
SDASCL
BUZZER VCQ1
VBQ1
TXRS232RXRS232
TX RX
CLAV_A
CLAV_B
CLAV_C
CLAV_D
CLAV_E
Y5
Y4
Y3
Y2
Y1
X1 X2 X3 X4
BZ1
BUZZERPKM13EPY-4002-B0
Mesure tension batterie
VCC
VCC
MESALIM
R16
1k
R171k
VBATT
RE1 (Debuggage)
VCC
CLAV_DA
LCD_LED
1 2
J5RX/TX

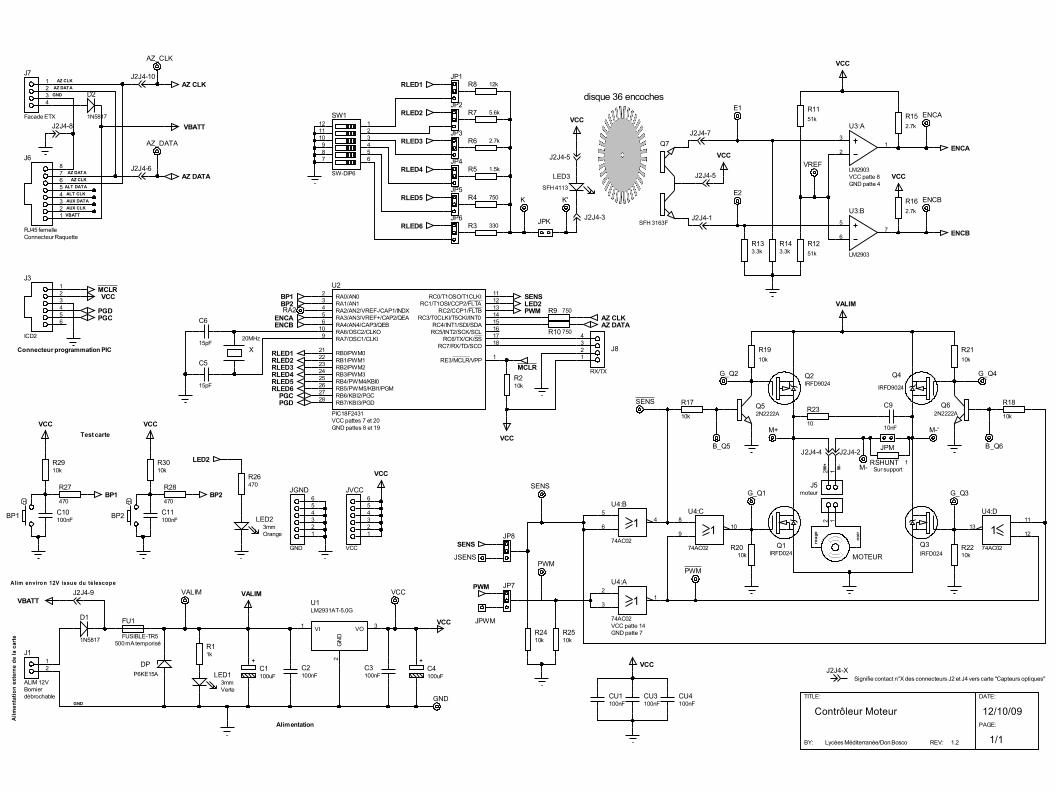
Le contrôleur moteur

Le contrôleur moteur
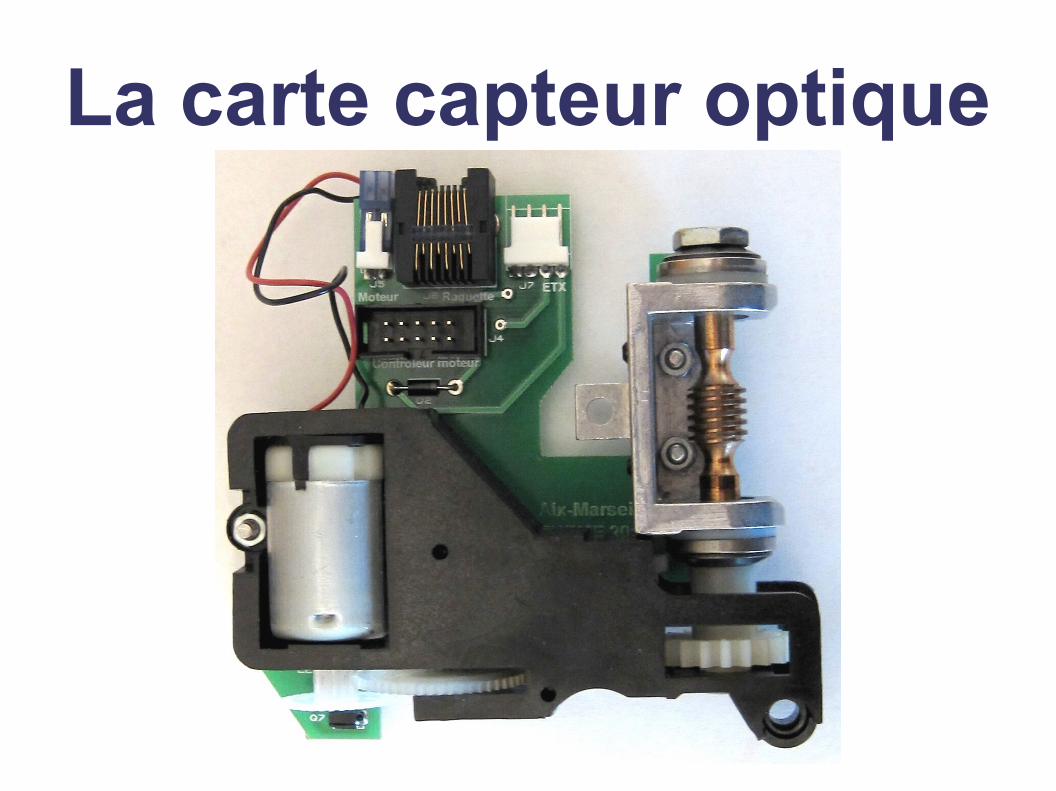
La carte capteur optique

Le capteur optique

Implantation de la carte capteur optique
AUX CLKAUX DATAALT CLK
ALT DATA
GND
AZ CLK
AZ CLKAZ DATA
AZ DATA
VBATT
M-
M+
GND
X20MHz
C6
15pF
C5
15pF
R3 330
R4 750
R5 1.5k
R6 2.7k
R7 5.6k
R8 12k
Q2IRFD9024
Q4
IRFD9024
Q3IRFD024
Q1IRFD024
R23
10
Q62N2222A
Q52N2222A
R1910k
R2110k
R18
10k
R17
10k
C9
10nF
R10 750
R9 750
VCC
R1251k
R1151k R15
2.7k
R162.7k
PWM
PWM
VALIM
R133.3k
R143.3k
3
21
U3:A
LM2903VCC patte 8GND patte 4
5
67
U3:B
LM2903
ENCA
ENCB
VCC
SENS
SENS
TITLE:
BY:
DATE:
PAGE:
Contrôleur Moteur 12/10/09
Lycées Méditerranée/Don Bosco 1/1REV: 1.2
RA0/AN02
RA1/AN13
RA2/AN2/VREF-/CAP1/INDX4
RA3/AN3/VREF+/CAP2/QEA5
RA4/AN4/CAP3/QEB6
RA6/OSC2/CLKO10
RA7/OSC1/CLKI9
RB0/PWM021
RB1/PWM122
RB2/PWM223
RB3/PWM324
RB4/PWM4/KBI025
RB5/PWM5/KBI1/PGM26
RC0/T1OSO/T1CLKI 11
RC1/T1OSI/CCP2/FLTA 12
RC2/CCP1/FLTB 13
RC3/T0CLKI/T5CKI/INT0 14
RC4/INT1/SDI/SDA 15
RC5/INT2/SCK/SCL 16
RC6/TX/CK/SS 17
RC7/RX/TD/SCO 18
RE3/MCLR/VPP 1
RB6/KBI2/PGC27
RB7/KBI3/PGD28
U2
PIC18F2431VCC pattes 7 et 20GND pattes 8 et 19
RLED1
RLED2
RLED3
RLED4
RLED5
RLED6
PGCPGD
ENCAENCB
R210k
VCC
MCLR
VCC
Connecteur programmation PIC
123456
J3
ICD2
MCLR
PGDPGC
RLED1RLED2RLED3RLED4RLED5RLED6
15
64
U4:B
74AC02
12
31
U4:A
74AC02VCC patte 14GND patte 7
18
910
U4:C
74AC02
111
1213
U4:D
74AC02R2010k
R2210k
1234
J7
Facade ETX
12
J5moteur
LED3SFH 4113
VCC
Q7
SFH 3163F
disque 36 encoches
12345678
J6
RJ45 femelleConnecteur Raquette
VBATT
D1
1N5817
C3100nF
C2100nF
GND
VCC
DPP6KE15A
FU1
FUSIBLE-TR5500 mA temporisé
+C1100uF
CU1100nF
VCC
Alimentation
D2
1N5817
Alim environ 12V issue du télescope
Alim
enta
tion
exte
rne
de la
car
te
LED13mmVerte
R11k
CU3100nF
CU4100nF
12
J1
ALIM 12VBornierdébrochable
VALIMVBATT
VCC
VALIM
G_Q2 G_Q4
M+ M-'
SENS
PWM
G_Q1 G_Q3
B_Q6B_Q5
SENS
PWM
BP1 C10100nF
R27
470
R26470
BP1
BP1BP2 LED2
BP2 C11100nF
R28
470BP2
LED2
123456
JGND
GND
123456
JVCC
VCC
VCC
JPK
E1
E2
ENCA
ENCB
VREF
K'K
AZ_CLK
AZ_DATA
MOTEUR
12
roug
e
noir
Test carte
LED23mmOrange
M-
JPM
R2510k
R2410k
JP1
JP2
JP3
JP4
JP5
JP6
JP8
JP7
JPWMVI1 VO 3
GN
D2
U1LM2931AT-5.0G
+C4100uF
JSENS
R2910k
R3010k
VCC VCC
RSHUNT 1Sur support
RA2
1234
J8
RX/TX
123456
121110987
SW1
SW-DIP6
J2J4-3
J2J4-7
J2J4-1
J2J4-10
J2J4-6J2J4-5
J2J4-9
J2J4-8
J2J4-2J2J4-4
AZ CLK
AZ CLK
AZ DATA
AZ DATA
VCC
J2J4-5
J2J4-XSignifie contact n°X des connecteurs J2 et J4 vers carte "Capteurs optiques"
L'alignement

GND
ALT CLKALT DATA
AZ CLKAZ DATA
3
21
U5:A
TLC3702VCC patte 8GND patte 4
&4
56
U3:B
74AC08
&9
108
U3:C
74AC08
&12
1311
U3:D
74AC08
1 2
13
U4:A
74HC4066
11 10
12
U4:B
74HC4066
4 3
5
U4:C
74HC4066
8 9
6
U4:D
74HC4066VCC patte 14GND patte 7
R9
13k3
R7100k
R84k7
VCC
LSEN-L
R5
100
R6
100
R4100k
R3100k
VCC
R12100
R10
1k
LED
LEDR22
1M
C7
100nFR1933k
R1710k
R1810k
SCLSDA
VCC
+PILE
PILE3VPile bouton CR2032
R1451k
R16 1k
OSC NORD
X1X2
XOUTYOUT
VBAT 3
X11
X22
SCL 6
SDA 5
SOUT 7
U8
DS1307+VCC patte 8GND patte 4
TITLE:
BY:
DATE:
PAGE:
Alignement 12/10/09
Lycées Méditerranée/Don Bosco 1/1REV: 1.2
32kHz 12
Vbat 5
U7
DS32KHZ
VCC patte 13GND patte 4
Horodatage
LED3LASERSmartfinder
D1
1N5817
C3100nF
C2100nF
GND
VCC
DPP6KE15A
FU1
FUSIBLE-TR5100 mA rapide
+ C1100uF
Alimentation
Alim environ 12V issue du télescope
Alim
enta
tion
exte
rne
de la
car
te
LED13mmVerte
R11k
12
J1
ALIM 12VBornierdébrochable
VALIMVBATT
VCC
VALIM
VCC
Connecteur programmation PIC
123456
J3
ICD2
MCLR
PGDPGC
CU2100nF
Yout 2
Tout 1
GN
D3
VD
A4
Vref 6
Sck7
VD
D8
Xout 5
U6
MXD2020E
VCC
CU6100nF
+ C4100uF
D2
1N5817
12345678
J4
RJ45 femelleConnecteur Raquette
VBATT
AUX DATA
1234
J21234
J5
VCC
YOUTXOUT
AUX CLK
R1351k
R15 1k
VCC
5
67
U5:B
TLC3702
&1
23
U3:A
74AC08VCC patte 14GND patte 7
VCC
LED2rouge3mm
R11470
VI1 VO 3
GN
D2
U1LM2931AT-5.0G
12
J612
Carte Inclinometre
Smartfinder
X32MHz
C5
18pF
C6
18pF
PGCPGD
AUX CLK
AUX DATA
R210k
VCC
MCLR
RA4/T0CKI/C1OUT6
RA5/AN4/SS/LVDIN/C2OUT7
RA6/OSC2/CLKO10
RA7/OSC1/CLKI9
RB0/AN12/INT021
RB1/AN10/INT122
RB2/AN8/INT223
RB3/AN9/CCP2B24
RB4/AN11/KBI025
RB5/KBI1/PGM26
RB6/KBI2/PGC27
RB7/KBI3/PGD28
RC0/T1OSO/T1CKI 11
RC3/SCK/SCL 14
RC4/SDI/SDA 15
RC5/SDO 16
RC6/TX/CK 17
RC7/RX/DT 18
RE3/MCLR/VPP 1
RC1/T1OSI/CCP2A 12
RC2/CCP1/P1A 13
RA0/AN0/C1IN-2
RA1/AN1/C2IN-3
RA2/AN2/C2IN+/VREF-/CVREF4
RA3/AN3/C1IN+/VREF+5
U2
PIC18F2320VCC patte 20GND pattes 8 et 19
SCLSDA
YOUT
XOUT
Q1BC307B
rouge
noir
Mesure d'inclinaison
Pointeur
RC0
+PILE
32KHZ SCL
SDA
LED
X1
X2
OSC NORD
U5+
U5-
B_Q1
C_Q1
AUX DATA
AUX CLK
CU7100nF
CU8100nF
+PILE
1234
J7
RX/TX
Détection Nord
X1
X2 OSC NORD
CU3100nF
VCC
CU4100nF
CU5100nF

Principe physique des capteurs● Le capteur de nord● Le capteur d'inclinaison

MXD2020
Un accéléromètre capable de mesurer des accélérations constantes ou non (vibrations).
● Échelle : +/- 1g● Précision : 20%

MXD2020E/F FUNCTIONAL BLOCK DIAGRAM

xy
ux2
ux1
uy2
uy1
Gradient de température symétrique

xy
ux2
ux1
uy2
uy1
Gradient de température asymétrique

MXD2020E/F FUNCTIONAL BLOCK DIAGRAM
-1 -0,8 -0,6 -0,4 -0,2 0 0,2 0,4 0,6 0,8 10
0,1
0,2
0,3
0,4
0,5
0,6
0,7
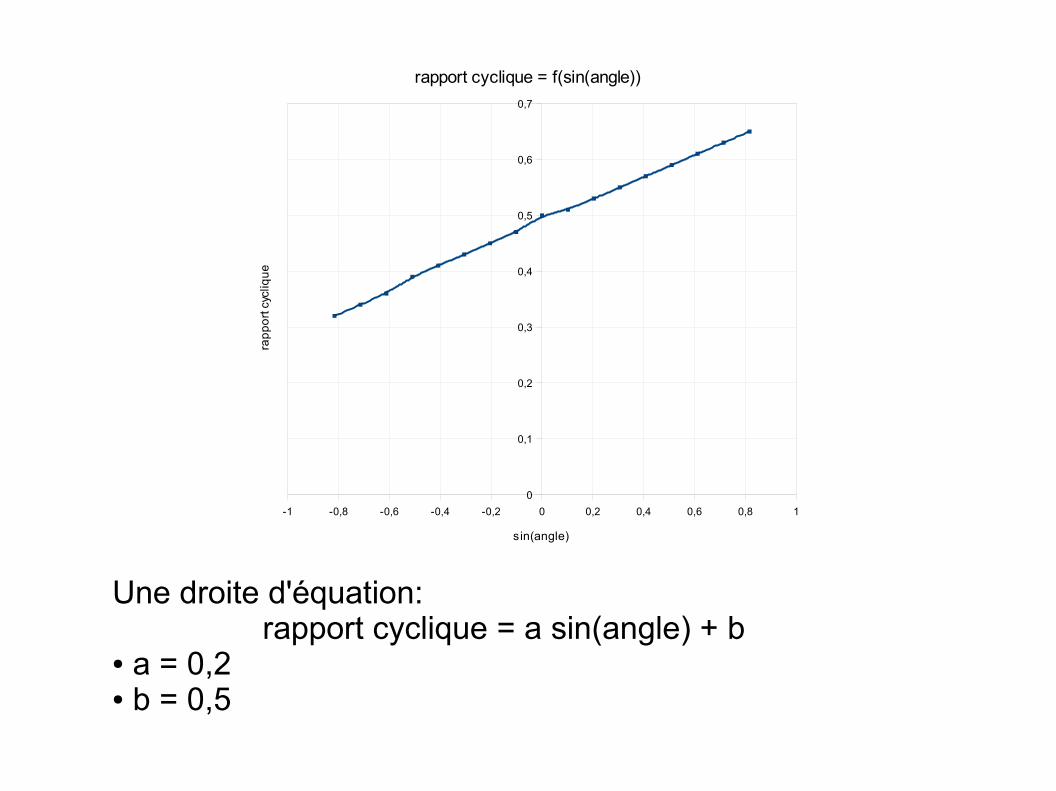
rapport cyclique = f(sin(angle))
sin(angle)
rapp
ort c
ycliq
ue
Une droite d'équation: rapport cyclique = a sin(angle) + b
● a = 0,2● b = 0,5

PNI SENS-L
Un capteur dont l'inductance varie en fonction du champ magnétique.● Lmin=1,75mH● Lmax=5,25mH● R : 110 à 130 Ω

Astable à circuit RL
T=k.L

360
100
angle [°]
vale
ur m
esur
ée [µ
s]
270180900
200
-200
-100
0N E S O N
N
S
angle

Principe physique des capteurs● Le capteur de nord● Le capteur d'inclinaison

Les interconnexions

ALT DATA
ALT DATA
ALT CLK
ALT CLK
AZ DATA
AZ DATA
AZ CLK
AZ CLK
AUX DATA
AUX DATA
AUX DATA
AUX DATA
GND
ALT
DA
TA
AZ
DA
TA
AUX CLK
AUX CLK
AUX CLK AUX CLK
GND
GND
GND
VBATT
VBATT
VBATT
VBATT
VBATTGNDGND
GND
AUX CLK
AUX
CLK
AUX
DA
TA
AUX DATA
GND
GND
GN
D
VB
ATT
VBATT
VBATT
VBAT
TVB
ATT
ALT DATA
AZ DATA M-
M+
AZ CLK
ALT CLK
AUX
CLK
AUX
DA
TA
AUX
DA
TA
AZ
CLK
ALT
CLK
AUX
CLK
M-M+
1234
RJ11 femelleConnecteur AUX
12345678
JP4
RJ45 femelleConnecteur HBX
1234
RJ11 femelleConnecteur AUX
123456
JP5
vers cartesmoteur ALT & LNT
1234
JP3
vers carteMOTEUR AZ
PILES
(deconnecté en cas d'alimentation externe)
JP6
+12V
GND
TITLE:
BY:
DATE:
PAGE:
Câblage Télescope ETX90PE 07/10/09
Lycées Méditerranée/Don Bosco 1/1REV: 1.0
1 2 3 4 5 6 7 8
J3RJ45 femelle
AUTOSTAR
1 2 3 4 5 6 7 8
CORDON CROISE TORSADE
RJ45 male
12345678
RJ45 male
FACADE ETX90
1234 1
234noir
rougejaunebleu
noirrouge
jaunebleu
123456
123456
blancvert
1234
JP2
CARTE MOTEUR AZ
123456
JP2
1 2 3 4
JP3
1 2 3 4
CARTE MOTEUR ALT
vert
bleu
jaun
ero
uge
LNT
MOTEUR AZ
1 2
JP1
1 2
rougenoir
MOTEUR ALT
12
JP112
rouge
noir
POINTEUR
VBATT

ALT DATA
ALT DATA
ALT CLK
ALT CLK
AZ DATA
AZ DATA
AZ CLK
AZ CLK
AUX DATA
AUX DATA
AUX DATA
AUX DATA
GND
ALT
DA
TA
AZ
DA
TA
AUX CLK
AUX CLK
AUX CLK AUX CLK
GND
GND
GND
VBATT
VBATT
VBATT
VBATT
VBATTGNDGND
GND
AUX CLK
AUX
CLK
AUX
DA
TA
AUX DATA
GND
GND
GN
D
VB
ATT
VBATT
VBATT
VBAT
TVB
ATT
ALT DATA
AZ DATA M-
M+
AZ CLK
ALT CLK
AUX
CLK
AUX
DA
TA
AUX
DA
TA
AZ
CLK
ALT
CLK
AUX
CLK
M-M+
1234
RJ11 femelleConnecteur AUX
12345678
JP4
RJ45 femelleConnecteur HBX
1234
RJ11 femelleConnecteur AUX
123456
JP5
vers cartesmoteur ALT & LNT
1234
JP3
vers carteMOTEUR AZ
PILES
(deconnecté en cas d'alimentation externe)
JP6
+12V
GND
TITLE:
BY:
DATE:
PAGE:
Câblage Télescope ETX90PE 07/10/09
Lycées Méditerranée/Don Bosco 1/1REV: 1.0
1 2 3 4 5 6 7 8
J3RJ45 femelle
AUTOSTAR
1 2 3 4 5 6 7 8
CORDON CROISE TORSADE
RJ45 male
12345678
RJ45 male
FACADE ETX90
1234 1
234noir
rougejaunebleu
noirrouge
jaunebleu
123456
123456
blancvert
1234
JP2
CARTE MOTEUR AZ
123456
JP2
1 2 3 4
JP3
1 2 3 4
CARTE MOTEUR ALT
vert
bleu
jaun
ero
uge
LNT
MOTEUR AZ
1 2
JP1
1 2
rougenoir
MOTEUR ALT
12
JP112
rouge
noir
POINTEUR
VBATT
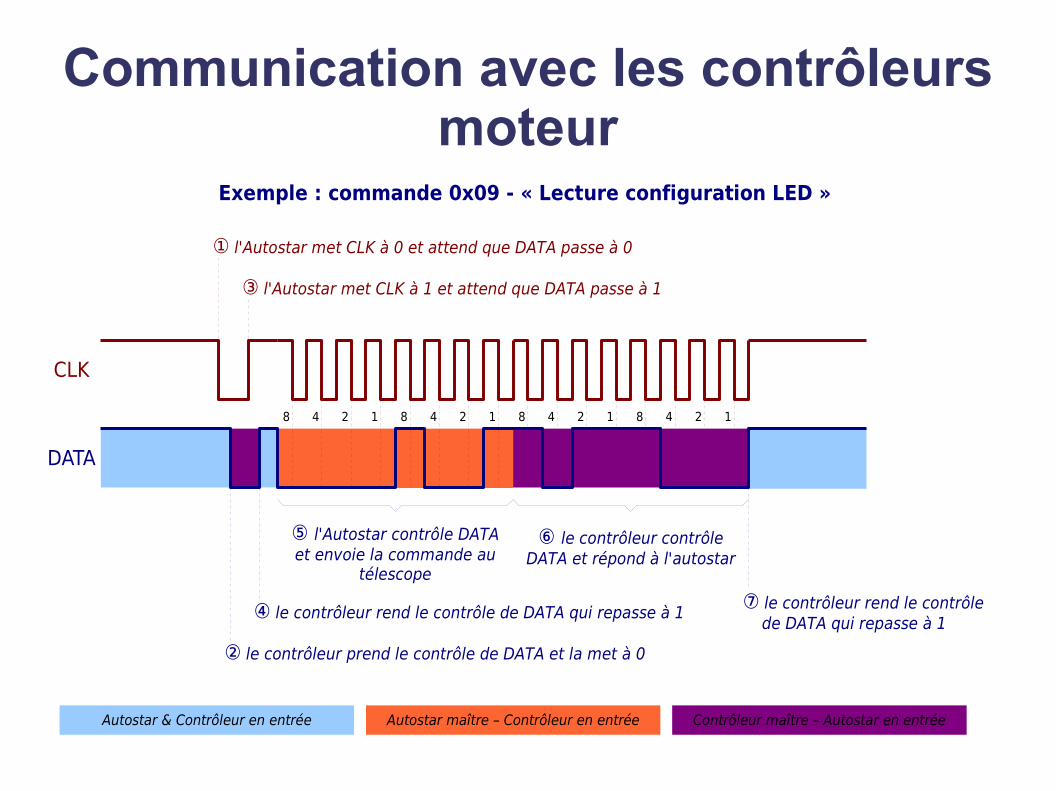
Communication avec les contrôleurs moteur
Exemple : commande 0x09 - « Lecture configuration LED »
CLK
DATA
8 4 2 18 4 2 1
⑥ le contrôleur contrôle DATA et répond à l'autostar
⑤ l'Autostar contrôle DATA et envoie la commande au
télescope
8 4 2 18 4 2 1
② le contrôleur prend le contrôle de DATA et la met à 0
④ le contrôleur rend le contrôle de DATA qui repasse à 1 ⑦ le contrôleur rend le contrôle de DATA qui repasse à 1
① l'Autostar met CLK à 0 et attend que DATA passe à 0
③ l'Autostar met CLK à 1 et attend que DATA passe à 1
Autostar & Contrôleur en entrée Autostar maître – Contrôleur en entrée Contrôleur maître – Autostar en entrée
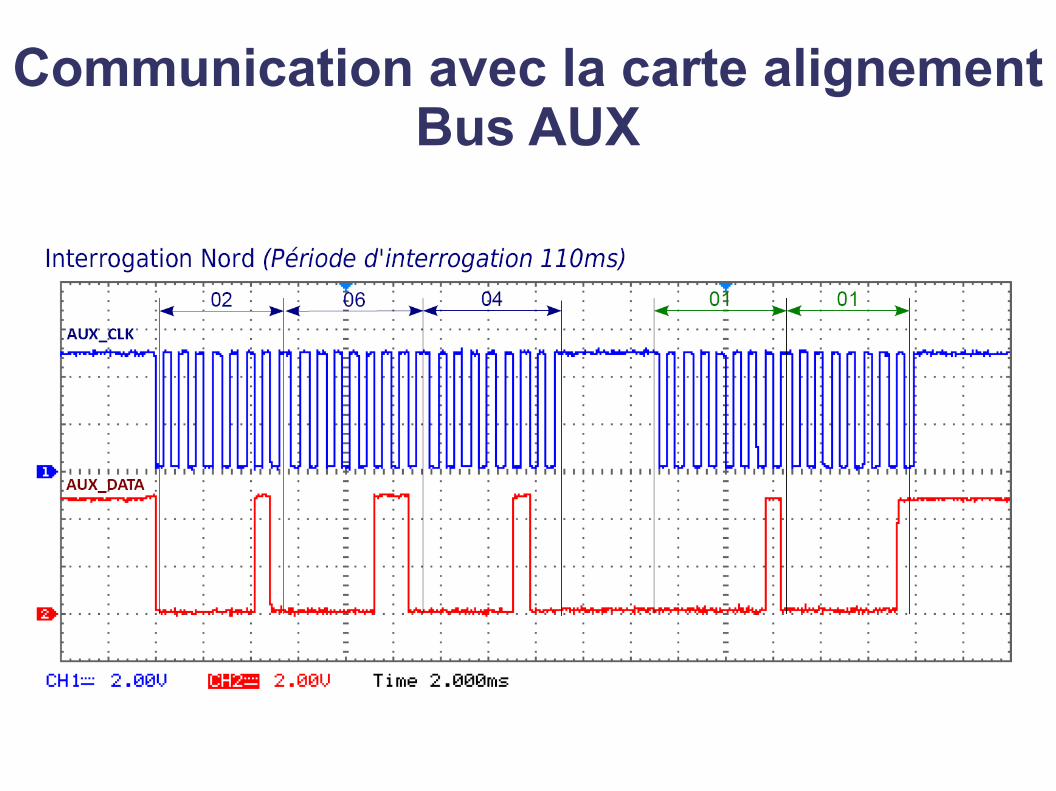
Communication avec la carte alignementBus AUX

ALT DATA
ALT DATA
ALT CLK
ALT CLK
AZ DATA
AZ DATA
AZ CLK
AZ CLK
AUX DATA
AUX DATA
AUX DATA
AUX DATA
GND
ALT
DA
TA
AZ
DA
TA
AUX CLK
AUX CLK
AUX CLK AUX CLK
GND
GND
GND
VBATT
VBATT
VBATT
VBATT
VBATTGNDGND
GND
AUX CLK
AUX
CLK
AUX
DA
TA
AUX DATA
GND
GND
GN
D
VB
ATT
VBATT
VBATT
VBAT
TVB
ATT
ALT DATA
AZ DATA M-
M+
AZ CLK
ALT CLK
AUX
CLK
AUX
DA
TA
AUX
DA
TA
AZ
CLK
ALT
CLK
AUX
CLK
M-M+
1234
RJ11 femelleConnecteur AUX
12345678
JP4
RJ45 femelleConnecteur HBX
1234
RJ11 femelleConnecteur AUX
123456
JP5
vers cartesmoteur ALT & LNT
1234
JP3
vers carteMOTEUR AZ
PILES
(deconnecté en cas d'alimentation externe)
JP6
+12V
GND
TITLE:
BY:
DATE:
PAGE:
Câblage Télescope ETX90PE 07/10/09
Lycées Méditerranée/Don Bosco 1/1REV: 1.0
1 2 3 4 5 6 7 8
J3RJ45 femelle
AUTOSTAR
1 2 3 4 5 6 7 8
CORDON CROISE TORSADE
RJ45 male
12345678
RJ45 male
FACADE ETX90
1234 1
234noir
rougejaunebleu
noirrouge
jaunebleu
123456
123456
blancvert
1234
JP2
CARTE MOTEUR AZ
123456
JP2
1 2 3 4
JP3
1 2 3 4
CARTE MOTEUR ALT
vert
bleu
jaun
ero
uge
LNT
MOTEUR AZ
1 2
JP1
1 2
rougenoir
MOTEUR ALT
12
JP112
rouge
noir
POINTEUR
VBATT

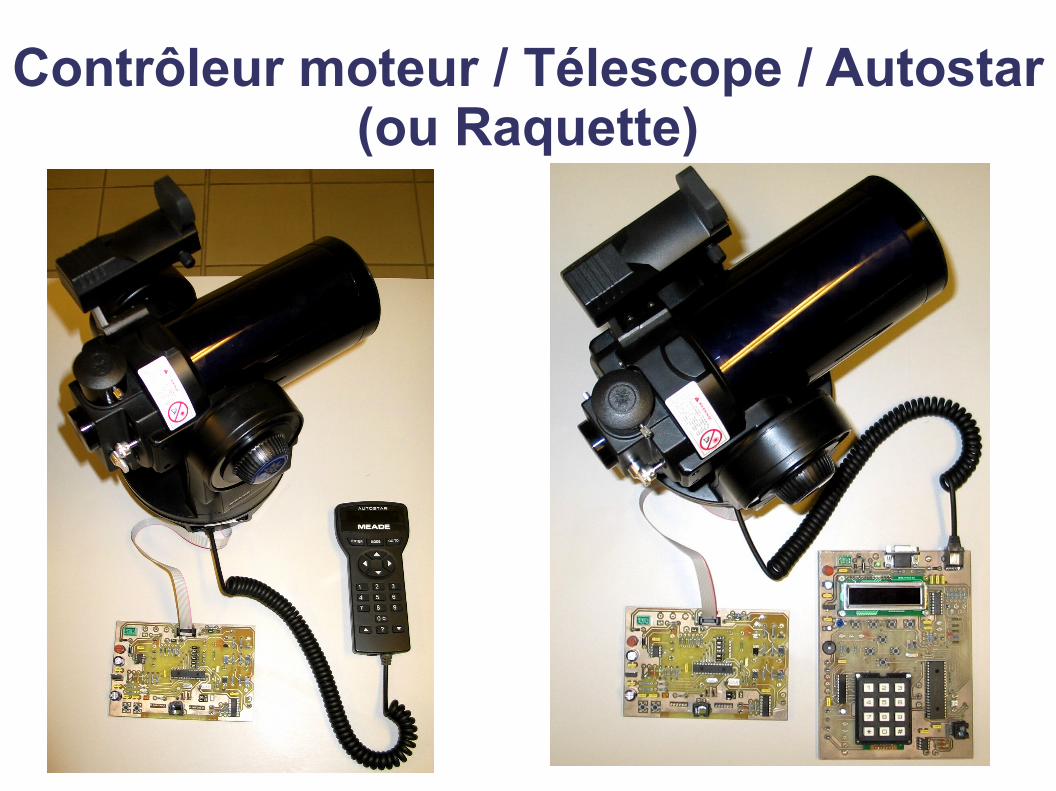
Contrôleur moteur / Télescope / Autostar (ou Raquette)

Contrôleur moteur / Raquette
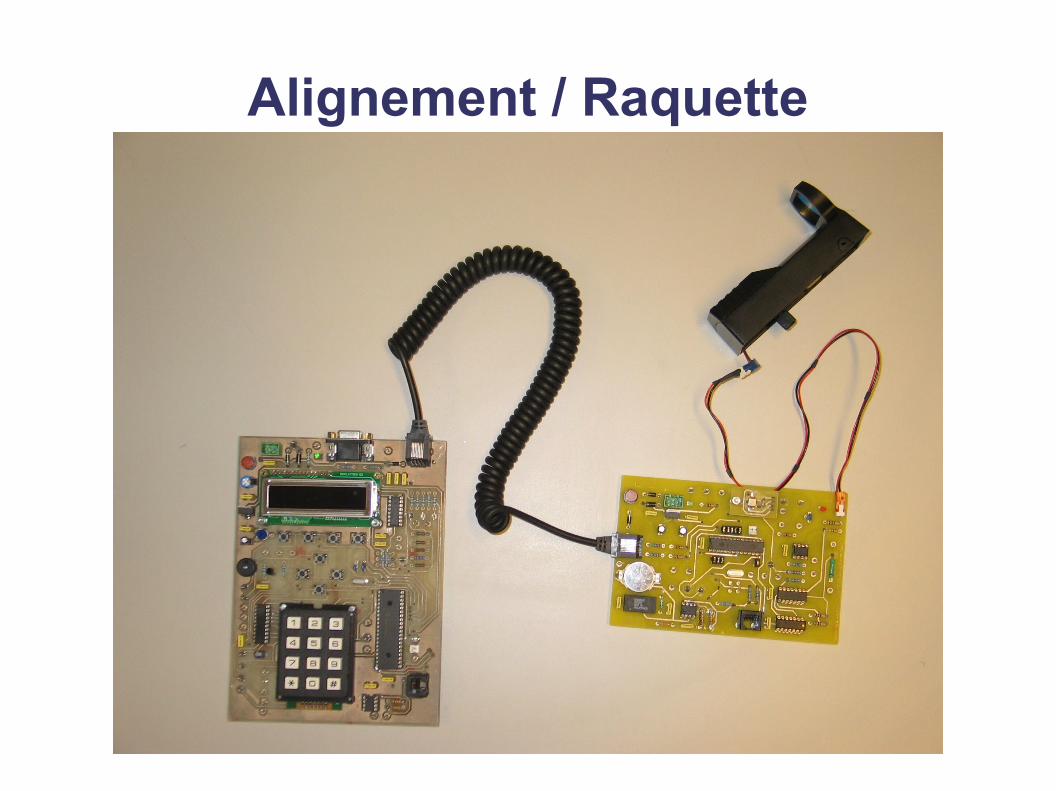
Alignement / Raquette