contrôleur de moteur cmms-as-c4-3a-g2 - festo.com€¦ · (0…1000)hz4a désignationdetype...
TRANSCRIPT
Description
Montage et
installation
8040105
1404a
[8034506]
Contrôleur de moteur
CMMS-AS-C4-3A-G2
CMMS-AS-C4-3A-G2
2 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a –
Traduction de la notice originale
GDCP-CMMS-AS-G2-HW-FR
CANopen®, DeviceNet®, EnDat®, Heidenhain®, PHOENIX®, PROFIBUS® sont des marques déposées
appartenant à leurs propriétaires respectifs dans certains pays.
Identification des dangers et remarques utiles pour les éviter :
AvertissementDangers pouvant entraîner la mort ou des blessures graves.
AttentionDangers pouvant entraîner des blessures légères ou de graves dégâts matériels.
Autres symboles :
NotaDégâts matériels ou dysfonctionnement.
Recommandation, conseil, renvoi à d’autres documents.
Accessoires nécessaires ou utiles.
Informations pour une utilisation écologique.
Identifications de texte :
• Activités qui peuvent être effectuées dans n’importe quel ordre.
1. Activités qui doivent être effectuées dans l’ordre indiqué.
– Énumérations générales.
CMMS-AS-C4-3A-G2
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 3
Table des matières – CMMS-AS-C4-3A-G2
1 Sécurité et conditions préalables à l'utilisation du produit 8. . . . . . . . . . . . . . . . . . . . . . . .
1.1 Sécurité 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Instructions de sécurité 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.2 Usage normal 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Conditions préalables à l'utilisation du produit 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Conditions de transport et de stockage 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Conditions techniques préalables 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.3 Qualification du personnel technique 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.4 Domaine d'application et certifications 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Vue d’ensemble du produit 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Système complet du CMMS-AS-C4-3A-G2 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Fourniture 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Vue de l'appareil 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Éléments d'affichage et de commande 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.1 Afficheur à sept segments 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.2 Témoins LED 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.3 Micro-interrupteur DIL 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.4 Emplacement d'enfichage [EXT] 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.5 Logement de carte [M1] pour carte mémoire SD 17. . . . . . . . . . . . . . . . . . . . . . . . .
3 Installation mécanique 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Dimensions de montage 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Montage 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Démontage 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Installation électrique 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Instructions de sécurité 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Remarques relatives à une installation sûre et conforme aux exigences CEM 23. . . . . . . . . .
4.2.1 Immunité aux perturbations et émissions perturbatrices 23. . . . . . . . . . . . . . . . . .
4.2.2 Câblage respectant la CEM 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.3 Mise à la terre de protection du contrôleur de moteur 25. . . . . . . . . . . . . . . . . . . .
4.2.4 Mise à la terre de protection du moteur 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Interface- I/O [X1] 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Codeur [X2] 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Interface STO [X3] 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Affectation des broches 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.2 Câblage sans utilisation de la fonction de sécurité STO [X3] 33. . . . . . . . . . . . . . . .
4.5.3 Câblage en cas d'utilisation de la fonction de sécurité STO [X3] 34. . . . . . . . . . . . .
CMMS-AS-C4-3A-G2
4 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
4.6 CAN [X4] 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7 Interface série RS232/RS485 [X5] 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8 Moteur [X6] 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8.1 Affectation des broches 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.8.2 Raccordement du blindage du câble pour moteur 38. . . . . . . . . . . . . . . . . . . . . . .
4.8.3 Raccordement d'un frein de maintien 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.9 Alimentation électrique [X9] 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.9.1 Alimentation logique – Très Basse Tension de Protection (TBTP) 40. . . . . . . . . . . .
4.9.2 Affectation des broches 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.9.3 Raccordement à la tension d’alimentation 41. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.10 Interface maître/esclave [X10] 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Mise en service 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Maintenance, entretien, réparation et remplacement 44. . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Maintenance et entretien 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Réparation 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Remplacement et mise au rebut 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Démontage et montage 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2 Mise au rebut 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Annexe technique 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Caractéristiques techniques 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Données de raccordement 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.1 Protection réseau 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.2 Interface- I/O [X1] 48. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.3 Codeur [X2] 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.4 Interface STO [X3] 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.5 CAN [X4] 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.6 RS232/RS485 [X5] 50. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.7 Moteur [X6] 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2.8 Alimentation électrique et résistance de freinage [X9] 52. . . . . . . . . . . . . . . . . . . .
A.2.9 Interface maître/esclave [X10] 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Messages de diagnostic 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 Explications relatives aux messages de diagnostic 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 Messages de diagnostic avec remarques relatives à l'élimination de l'incident 55. . . . . . . . .
B.3 Errorcodes via CiA 301/402 68. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.4 Diagnostic PROFIBUS 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CMMS-AS-C4-3A-G2
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 5
Remarques relatives à la présente documentationCette documentation a pour but d'assurer un travail sûr avec le contrôleur de moteur CMMS-AS-…-G2
et décrit les fonctions, la mise en service et les messages d'erreur.
UtilisateursCette documentation s'adresse exclusivement aux spécialistes des techniques d'asservissement et
d'automatisation possédant une bonne maîtrise de l'installation, de la mise en service, de la prog-
rammation et du diagnostic des systèmes de positionnement.
Versions
Cette documentation se rapporte aux versions suivantes :
– Contrôleur de moteur CMMS-AS-C4-3A-G2 : à partir de la rév. 02 ( Plaque signa-
létique).
NotaAvant l'utilisation d'une version de firmware plus récente, vérifier si une version plus
récente du PlugIn FCT ou de la documentation utilisateur est disponible
(www.festo.com/sp).
Service après-ventePour toute question d'ordre technique, s'adresser à l'interlocuteur Festo en région.
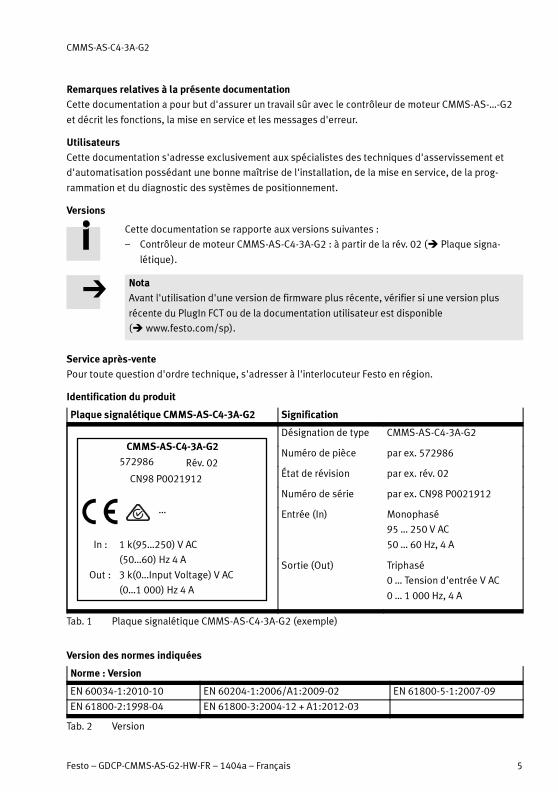
Identification du produit
Plaque signalétique CMMS-AS-C4-3A-G2 Signification
…
CMMS-AS-C4-3A-G2572986
CN98 P0021912
Rév. 02
In : 1 k(95…250) V AC
(50…60) Hz 4 A
Out : 3 k(0…Input Voltage) V AC
(0…1 000) Hz 4 A
Désignation de type CMMS-AS-C4-3A-G2
Numéro de pièce par ex. 572986
État de révision par ex. rév. 02
Numéro de série par ex. CN98 P0021912
Entrée (In) Monophasé
95 … 250 V AC
50 … 60 Hz, 4 A
Sortie (Out) Triphasé
0 … Tension d'entrée V AC
0 … 1 000 Hz, 4 A
Tab. 1 Plaque signalétique CMMS-AS-C4-3A-G2 (exemple)
Version des normes indiquées
Norme : Version
EN 60034-1:2010-10 EN 60204-1:2006/A1:2009-02 EN 61800-5-1:2007-09
EN 61800-2:1998-04 EN 61800-3:2004-12 + A1:2012-03
Tab. 2 Version
CMMS-AS-C4-3A-G2
6 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
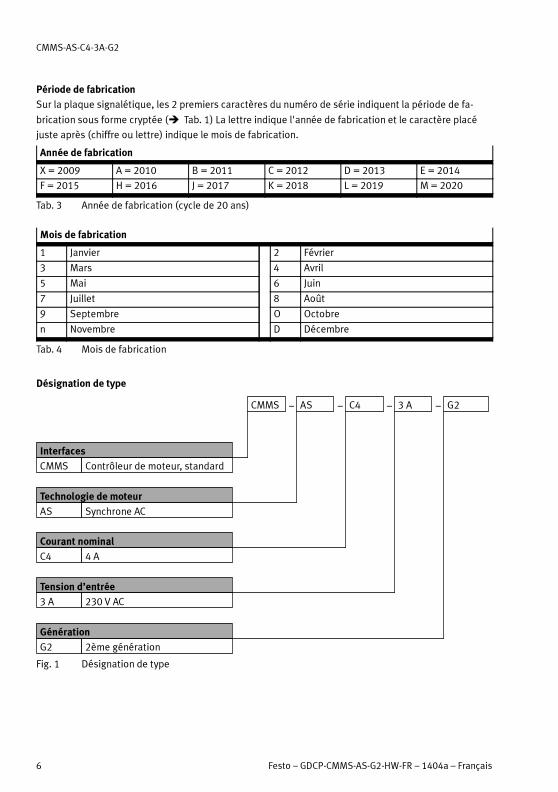
Période de fabricationSur la plaque signalétique, les 2 premiers caractères du numéro de série indiquent la période de fa-
brication sous forme cryptée ( Tab. 1) La lettre indique l'année de fabrication et le caractère placé
juste après (chiffre ou lettre) indique le mois de fabrication.
Année de fabrication
X = 2009 A = 2010 B = 2011 C = 2012 D = 2013 E = 2014
F = 2015 H = 2016 J = 2017 K = 2018 L = 2019 M = 2020
Tab. 3 Année de fabrication (cycle de 20 ans)
Mois de fabrication
1 Janvier 2 Février
3 Mars 4 Avril
5 Mai 6 Juin
7 Juillet 8 Août
9 Septembre O Octobre
n Novembre D Décembre
Tab. 4 Mois de fabrication
Désignation de type
CMMS –
Interfaces
AS C4 3 A G2–––
CMMS Contrôleur de moteur, standard
Technologie de moteurAS Synchrone AC
Courant nominalC4 4 A
Tension d’entrée3 A 230 V AC
GénérationG2 2ème génération
Fig. 1 Désignation de type
CMMS-AS-C4-3A-G2
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 7
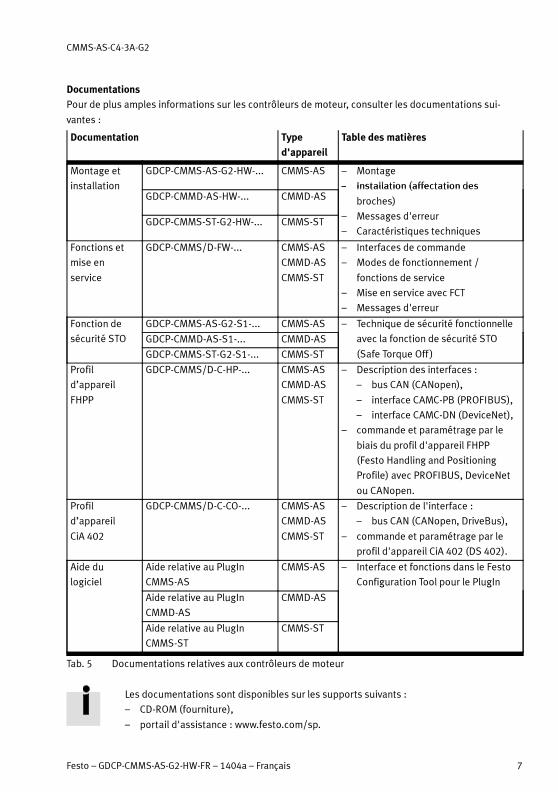
DocumentationsPour de plus amples informations sur les contrôleurs de moteur, consulter les documentations sui-
vantes :
Documentation Typed'appareil
Table des matières
Montage et
installation
GDCP-CMMS-AS-G2-HW-... CMMS-AS – Montage
– Installation (affectation desGDCP-CMMD-AS-HW-... CMMD-AS
– Installation (affectation des
broches)
– Messages d'erreur
– Caractéristiques techniquesGDCP-CMMS-ST-G2-HW-... CMMS-ST
Fonctions et
mise en
service
GDCP-CMMS/D-FW-... CMMS-AS
CMMD-AS
CMMS-ST
– Interfaces de commande
– Modes de fonctionnement /
fonctions de service
– Mise en service avec FCT
– Messages d'erreur
Fonction de
sécurité STO
GDCP-CMMS-AS-G2-S1-... CMMS-AS – Technique de sécurité fonctionnelle
GDCP-CMMD-AS-S1-... CMMD-AS
q
avec la fonction de sécurité STO
(Safe Torque Off )GDCP-CMMS-ST-G2-S1-... CMMS-ST
Profil
d’appareil
FHPP
GDCP-CMMS/D-C-HP-... CMMS-AS
CMMD-AS
CMMS-ST
– Description des interfaces :
– bus CAN (CANopen),
– interface CAMC-PB (PROFIBUS),
– interface CAMC-DN (DeviceNet),
– commande et paramétrage par le
biais du profil d'appareil FHPP
(Festo Handling and Positioning
Profile) avec PROFIBUS, DeviceNet
ou CANopen.
Profil
d’appareil
CiA 402
GDCP-CMMS/D-C-CO-... CMMS-AS
CMMD-AS
CMMS-ST
– Description de l'interface :
– bus CAN (CANopen, DriveBus),
– commande et paramétrage par le
profil d'appareil CiA 402 (DS 402).
Aide du
logiciel
Aide relative au PlugIn
CMMS-AS
CMMS-AS – Interface et fonctions dans le Festo
Configuration Tool pour le PlugIn
Aide relative au PlugIn
CMMD-AS
CMMD-AS
g p g
Aide relative au PlugIn
CMMS-ST
CMMS-ST
Tab. 5 Documentations relatives aux contrôleurs de moteur
Les documentations sont disponibles sur les supports suivants :
– CD-ROM (fourniture),
– portail d'assistance : www.festo.com/sp.
1 Sécurité et conditions préalables à l'utilisation du produit
8 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
1 Sécurité et conditions préalables à l'utilisation du produit
1.1 Sécurité
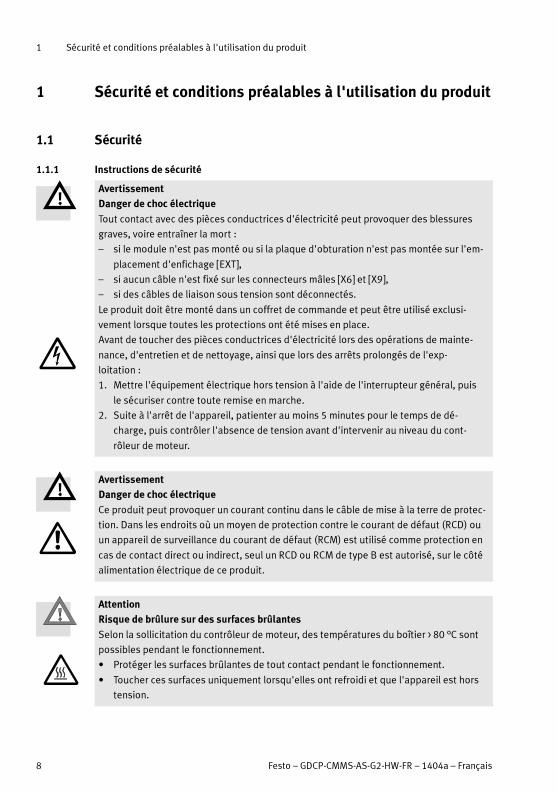
1.1.1 Instructions de sécurité
AvertissementDanger de choc électrique
Tout contact avec des pièces conductrices d'électricité peut provoquer des blessures
graves, voire entraîner la mort :
– si le module n'est pas monté ou si la plaque d'obturation n'est pas montée sur l'em-
placement d'enfichage [EXT],
– si aucun câble n'est fixé sur les connecteurs mâles [X6] et [X9],
– si des câbles de liaison sous tension sont déconnectés.
Le produit doit être monté dans un coffret de commande et peut être utilisé exclusi-
vement lorsque toutes les protections ont été mises en place.
Avant de toucher des pièces conductrices d'électricité lors des opérations de mainte-
nance, d'entretien et de nettoyage, ainsi que lors des arrêts prolongés de l'exp-
loitation :
1. Mettre l'équipement électrique hors tension à l'aide de l'interrupteur général, puis
le sécuriser contre toute remise en marche.
2. Suite à l'arrêt de l'appareil, patienter au moins 5 minutes pour le temps de dé-
charge, puis contrôler l'absence de tension avant d'intervenir au niveau du cont-
rôleur de moteur.
AvertissementDanger de choc électrique
Ce produit peut provoquer un courant continu dans le câble de mise à la terre de protec-
tion. Dans les endroits où unmoyen de protection contre le courant de défaut (RCD) ou
un appareil de surveillance du courant de défaut (RCM) est utilisé comme protection en
cas de contact direct ou indirect, seul un RCD ou RCM de type B est autorisé, sur le côté
alimentation électrique de ce produit.
AttentionRisque de brûlure sur des surfaces brûlantes
Selon la sollicitation du contrôleur de moteur, des températures du boîtier > 80 °C sont
possibles pendant le fonctionnement.
• Protéger les surfaces brûlantes de tout contact pendant le fonctionnement.
• Toucher ces surfaces uniquement lorsqu'elles ont refroidi et que l'appareil est hors
tension.
1 Sécurité et conditions préalables à l'utilisation du produit
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 9
NotaDanger dû au mouvement inattendu du moteur ou de l'axe
• Veiller à ce que ce mouvement ne mette personne en danger.
• Conformément à la directive Machines, réaliser une analyse du risque.
• Sur la base de cette analyse du risque, concevoir un système de sécurité pour l'en-
semble de la machine en incluant tous les composants intégrés. Les actionneurs
électriques en font également partie. Le pontage de dispositifs de sécurité n'est pas
autorisé.
1.1.2 Usage normal
Conformément à l'usage prévu, le contrôleur de moteur CMMS-AS-C4-3A-G2 est utilisé comme ré-
gulateur pour servomoteurs de la série EMMS-AS. Il permet la régulation du couple de torsion (cou-
rant), de la vitesse de rotation, de la position ainsi que la commande de positionnement avec des
enregistrements de déplacements. Le contrôleur de moteur a été conçu pour un montage dans un cof-
fret de commande.
Le produit est destiné à être utilisé dans le domaine industriel. Des mesures d'antiparasitage doivent
éventuellement être prises en cas d'utilisation hors d'environnements industriels, par ex. en zones
résidentielles, commerciales ou mixtes.
Utilisation exclusivement :
– dans un état fonctionnel irréprochable,
– dans son état d'origine sans modifications non autorisées ; seules les extensions décrites dans la
documentation accompagnant le produit sont autorisées,
– dans les limites du produit définies par les caractéristiques techniques ( Annexe A.1),
– dans le domaine industriel,
– comme appareil à encastrer dans un coffret de commande.
Tout dommage dû à des interventions menées par des personnes non autorisées ou toute utilisation
non conforme entraîne l'exclusion des recours en garantie et dégage le fabricant de sa responsabilité.
Le contrôleur de moteur prend en charge la fonction de sécurité suivante :
– Couple désactivé de manière sûre – “Safe Torque Off ” (STO)
Pour plus d'informations Description Fonction de sécurité STO,
GDCP-CMMS-AS-G2-S1-....
1 Sécurité et conditions préalables à l'utilisation du produit
10 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
1.2 Conditions préalables à l'utilisation du produit
• Mettre la présente notice d'utilisation à disposition du concepteur, du monteur et de l'ensemble du
personnel chargé de la mise en service de la machine ou de l'installation dans laquelle ce produit
sera utilisé.
• Veiller au respect permanent des consignes figurant dans la présente notice. À cet effet, prendre éga-
lement en considération toutes les documentations concernant les autres composants et modules.
• Pour le lieu de destination, tenir également compte des réglementations légales en vigueur,
notamment :
– des prescriptions et normes,
– des règlements des organismes de certification et des assurances,
– des dispositions nationales en vigueur.
1.2.1 Conditions de transport et de stockage
• Lors du transport et du stockage, protéger le produit contre des sollicitations non autorisées telles que :
– contraintes mécaniques,
– températures non autorisées,
– humidité,
– atmosphères agressives.
• Stocker et transporter le produit dans son emballage d'origine. L'emballage d'origine offre une
protection suffisante contre les sollicitations habituelles.
1.2.2 Conditions techniques préalablesPour une utilisation conforme et en toute sécurité du produit :
• Respecter les conditions ambiantes et de raccordement spécifiées pour le produit dans les caracté-
ristiques techniques ( Annexe A) ainsi que pour tous les composants connectés. Le respect des
valeurs limites ou des limites de charge permet un fonctionnement du produit conforme aux direc-
tives de sécurité en vigueur.
• Respecter les avertissements et remarques figurant dans cette documentation.
1.2.3 Qualification du personnel techniqueCe produit doit impérativement être mis en service par une personne qualifiée dans le domaine de
l'électrotechnique et familiarisée avec les éléments suivants :
– l'installation et le fonctionnement de systèmes de commande électriques,
– les prescriptions en vigueur concernant l'exploitation des installations de sécurité,
– les prescriptions en vigueur relatives à la sécurité et la prévention des accidents,
– la documentation relative à ce produit.
1.2.4 Domaine d'application et certifications
Le contrôleur de moteur avec fonction de sécurité intégrée STO est un composant de sécurité des com-
mandes. Le contrôleur de moteur porte un marquage CE, pour les normes et valeurs de contrôle
Annexe A.1.
Les directives CE relatives à ce produit figurent dans la déclaration de conformité.
Les certificats et la déclaration de conformité de ce produit sont disponibles à l'adresse
suivantewww.festo.com/sp.
2 Vue d’ensemble du produit
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 11
2 Vue d’ensemble du produit
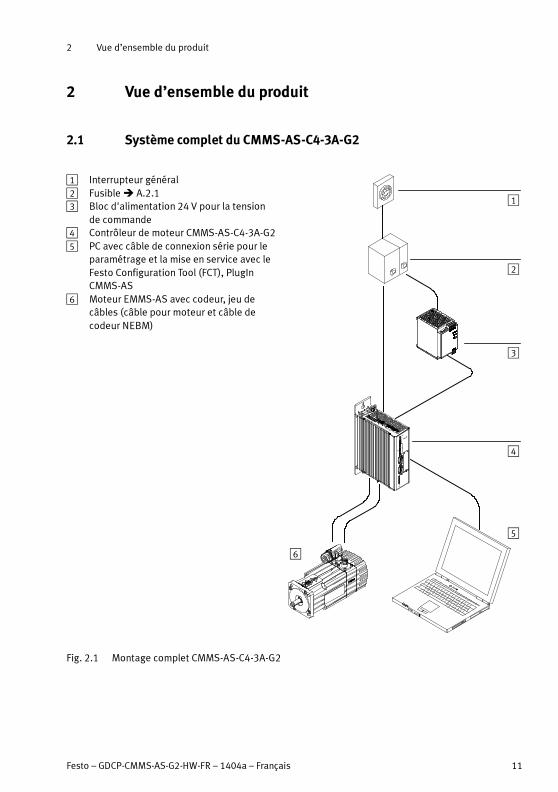
2.1 Système complet du CMMS-AS-C4-3A-G2
1 Interrupteur général2 Fusible A.2.13 Bloc d'alimentation 24 V pour la tension
de commande4 Contrôleur de moteur CMMS-AS-C4-3A-G25 PC avec câble de connexion série pour le
paramétrage et la mise en service avec leFesto Configuration Tool (FCT), PlugInCMMS-AS
6 Moteur EMMS-AS avec codeur, jeu decâbles (câble pour moteur et câble decodeur NEBM)
5
6
1
2
3
4
Fig. 2.1 Montage complet CMMS-AS-C4-3A-G2
2 Vue d’ensemble du produit
12 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
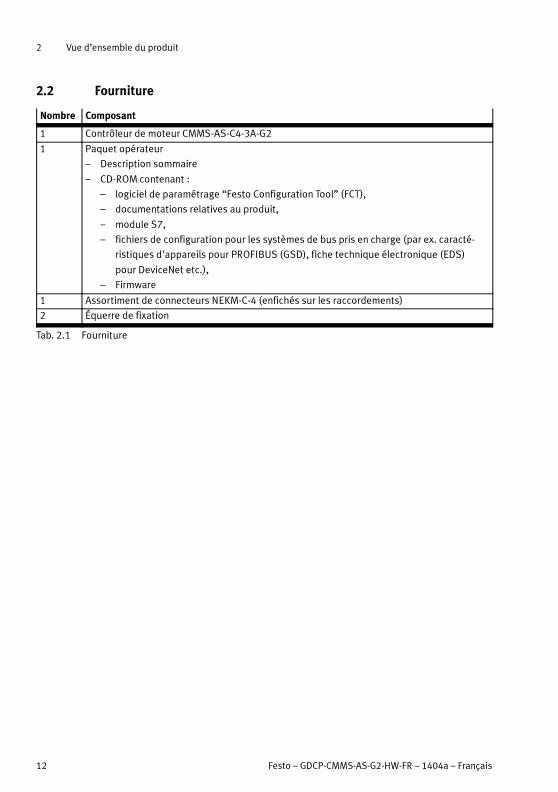
2.2 Fourniture
Nombre Composant
1 Contrôleur de moteur CMMS-AS-C4-3A-G2
1 Paquet opérateur
– Description sommaire
– CD-ROM contenant :
– logiciel de paramétrage “Festo Configuration Tool” (FCT),
– documentations relatives au produit,
– module S7,
– fichiers de configuration pour les systèmes de bus pris en charge (par ex. caracté-
ristiques d'appareils pour PROFIBUS (GSD), fiche technique électronique (EDS)
pour DeviceNet etc.),
– Firmware
1 Assortiment de connecteurs NEKM-C-4 (enfichés sur les raccordements)
2 Équerre de fixation
Tab. 2.1 Fourniture
2 Vue d’ensemble du produit
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 13
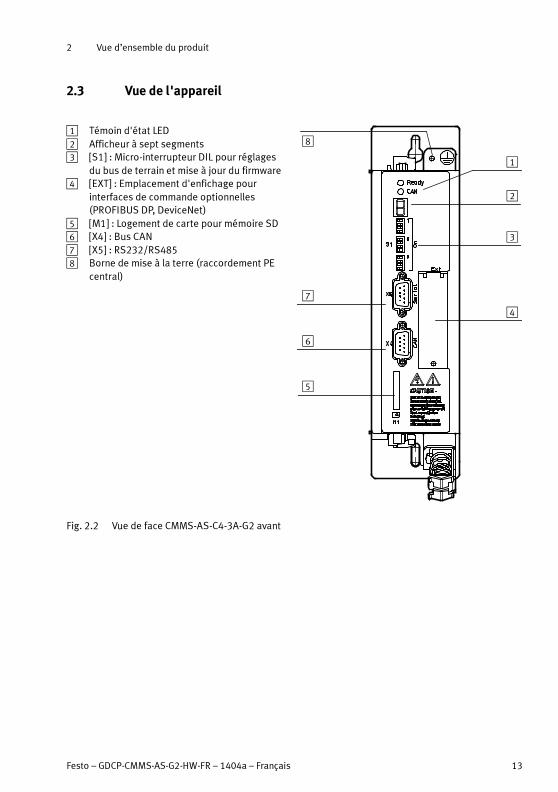
2.3 Vue de l'appareil
1 Témoin d'état LED2 Afficheur à sept segments3 [S1] : Micro-interrupteur DIL pour réglages
du bus de terrain et mise à jour du firmware4 [EXT] : Emplacement d'enfichage pour
interfaces de commande optionnelles(PROFIBUS DP, DeviceNet)
5 [M1] : Logement de carte pour mémoire SD6 [X4] : Bus CAN7 [X5] : RS232/RS4858 Borne de mise à la terre (raccordement PE
central)
1
2
3
4
5
6
7
8
Fig. 2.2 Vue de face CMMS-AS-C4-3A-G2 avant
2 Vue d’ensemble du produit
14 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
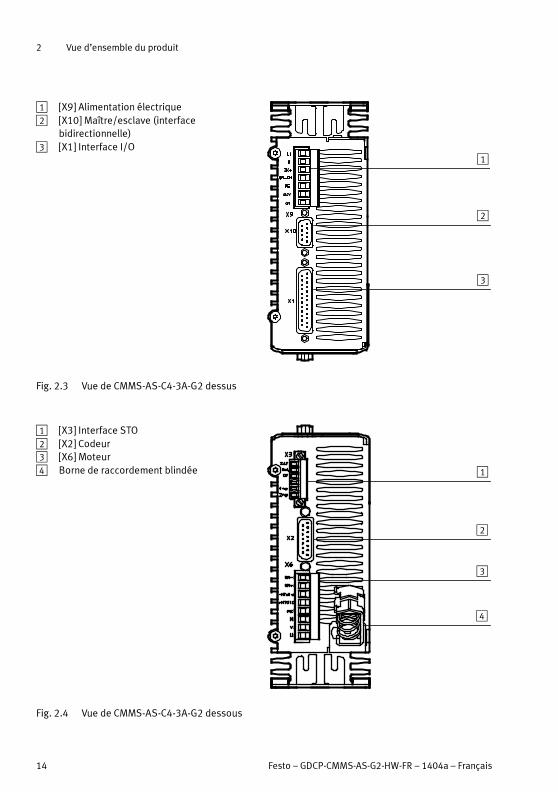
1 [X9] Alimentation électrique2 [X10] Maître/esclave (interface
bidirectionnelle)3 [X1] Interface I/O
1
3
2
Fig. 2.3 Vue de CMMS-AS-C4-3A-G2 dessus
1 [X3] Interface STO2 [X2] Codeur3 [X6] Moteur4 Borne de raccordement blindée 1
2
3
4
Fig. 2.4 Vue de CMMS-AS-C4-3A-G2 dessous
2 Vue d’ensemble du produit
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 15
2.4 Éléments d'affichage et de commande
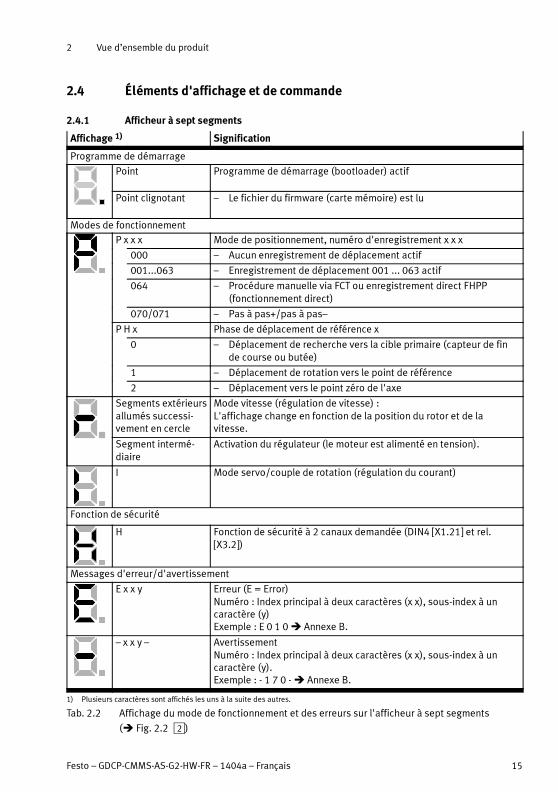
2.4.1 Afficheur à sept segments
Affichage 1) Signification
Programme de démarrage
Point Programme de démarrage (bootloader) actif
Point clignotant – Le fichier du firmware (carte mémoire) est lu
Modes de fonctionnement
P x x x Mode de positionnement, numéro d'enregistrement x x x
000 – Aucun enregistrement de déplacement actif
001...063 – Enregistrement de déplacement 001 ... 063 actif
064 – Procédure manuelle via FCT ou enregistrement direct FHPP(fonctionnement direct)
070/071 – Pas à pas+/pas à pas–
P H x Phase de déplacement de référence x
0 – Déplacement de recherche vers la cible primaire (capteur de finde course ou butée)
1 – Déplacement de rotation vers le point de référence
2 – Déplacement vers le point zéro de l'axe
Segments extérieursallumés successi-vement en cercle
Mode vitesse (régulation de vitesse) :L'affichage change en fonction de la position du rotor et de lavitesse.
Segment intermé-diaire
Activation du régulateur (le moteur est alimenté en tension).
I Mode servo/couple de rotation (régulation du courant)
Fonction de sécurité
H Fonction de sécurité à 2 canaux demandée (DIN4 [X1.21] et rel.[X3.2])
Messages d'erreur/d'avertissement
E x x y Erreur (E = Error)Numéro : Index principal à deux caractères (x x), sous-index à uncaractère (y)Exemple : E 0 1 0 Annexe B.
– x x y – AvertissementNuméro : Index principal à deux caractères (x x), sous-index à uncaractère (y).Exemple : - 1 7 0 - Annexe B.
1) Plusieurs caractères sont affichés les uns à la suite des autres.
Tab. 2.2 Affichage du mode de fonctionnement et des erreurs sur l'afficheur à sept segments
( Fig. 2.2 2)
2 Vue d’ensemble du produit
16 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
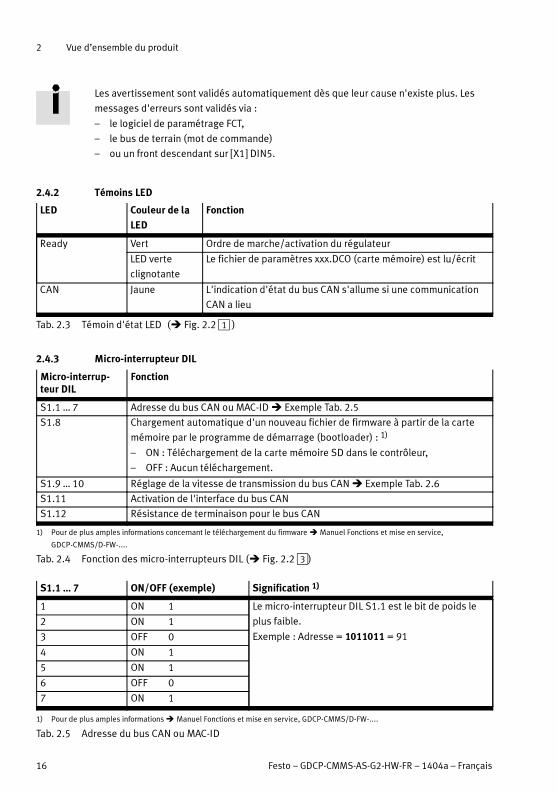
Les avertissement sont validés automatiquement dès que leur cause n'existe plus. Les
messages d'erreurs sont validés via :
– le logiciel de paramétrage FCT,
– le bus de terrain (mot de commande)
– ou un front descendant sur [X1] DIN5.
2.4.2 Témoins LED
LED Couleur de laLED
Fonction
Ready Vert Ordre de marche/activation du régulateur
LED verte
clignotante
Le fichier de paramètres xxx.DCO (carte mémoire) est lu/écrit
CAN Jaune L'indication d'état du bus CAN s'allume si une communication
CAN a lieu
Tab. 2.3 Témoin d'état LED ( Fig. 2.21 )
2.4.3 Micro-interrupteur DIL
Micro-interrup-teur DIL
Fonction
S1.1 … 7 Adresse du bus CAN ou MAC-ID Exemple Tab. 2.5
S1.8 Chargement automatique d'un nouveau fichier de firmware à partir de la carte
mémoire par le programme de démarrage (bootloader) : 1)
– ON : Téléchargement de la carte mémoire SD dans le contrôleur,
– OFF : Aucun téléchargement.
S1.9 … 10 Réglage de la vitesse de transmission du bus CAN Exemple Tab. 2.6
S1.11 Activation de l'interface du bus CAN
S1.12 Résistance de terminaison pour le bus CAN
1) Pour de plus amples informations concernant le téléchargement du firmware Manuel Fonctions et mise en service,
GDCP-CMMS/D-FW-....
Tab. 2.4 Fonction des micro-interrupteurs DIL ( Fig. 2.23)
S1.1 … 7 ON/OFF (exemple) Signification 1)
1 ON 1 Le micro-interrupteur DIL S1.1 est le bit de poids le
plus faible.
Exemple : Adresse = 1011011 = 91
2 ON 1
3 OFF 0
4 ON 1
5 ON 1
6 OFF 0
7 ON 1
1) Pour de plus amples informations Manuel Fonctions et mise en service, GDCP-CMMS/D-FW-....
Tab. 2.5 Adresse du bus CAN ou MAC-ID
2 Vue d’ensemble du produit
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 17
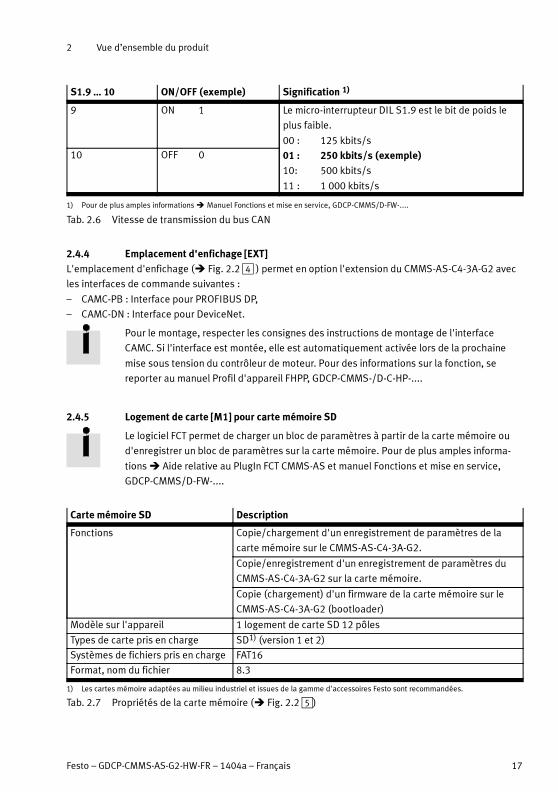
S1.9 … 10 ON/OFF (exemple) Signification 1)
9 ON 1 Le micro-interrupteur DIL S1.9 est le bit de poids le
plus faible.
00 : 125 kbits/s
01 : 250 kbits/s (exemple)10: 500 kbits/s
11 : 1 000 kbits/s
10 OFF 0
1) Pour de plus amples informations Manuel Fonctions et mise en service, GDCP-CMMS/D-FW-....
Tab. 2.6 Vitesse de transmission du bus CAN
2.4.4 Emplacement d'enfichage [EXT]L'emplacement d'enfichage ( Fig. 2.24 ) permet en option l'extension du CMMS-AS-C4-3A-G2 avec
les interfaces de commande suivantes :
– CAMC-PB : Interface pour PROFIBUS DP,
– CAMC-DN : Interface pour DeviceNet.
Pour le montage, respecter les consignes des instructions de montage de l'interface
CAMC. Si l'interface est montée, elle est automatiquement activée lors de la prochaine
mise sous tension du contrôleur de moteur. Pour des informations sur la fonction, se
reporter au manuel Profil d'appareil FHPP, GDCP-CMMS-/D-C-HP-....
2.4.5 Logement de carte [M1] pour carte mémoire SD
Le logiciel FCT permet de charger un bloc de paramètres à partir de la carte mémoire ou
d'enregistrer un bloc de paramètres sur la carte mémoire. Pour de plus amples informa-
tions Aide relative au PlugIn FCT CMMS-AS et manuel Fonctions et mise en service,
GDCP-CMMS/D-FW-....
Carte mémoire SD Description
Fonctions Copie/chargement d'un enregistrement de paramètres de la
carte mémoire sur le CMMS-AS-C4-3A-G2.
Copie/enregistrement d'un enregistrement de paramètres du
CMMS-AS-C4-3A-G2 sur la carte mémoire.
Copie (chargement) d'un firmware de la carte mémoire sur le
CMMS-AS-C4-3A-G2 (bootloader)
Modèle sur l'appareil 1 logement de carte SD 12 pôles
Types de carte pris en charge SD1) (version 1 et 2)
Systèmes de fichiers pris en charge FAT16
Format, nom du fichier 8.3
1) Les cartes mémoire adaptées au milieu industriel et issues de la gamme d'accessoires Festo sont recommandées.
Tab. 2.7 Propriétés de la carte mémoire ( Fig. 2.25)
3 Installation mécanique
18 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
3 Installation mécanique
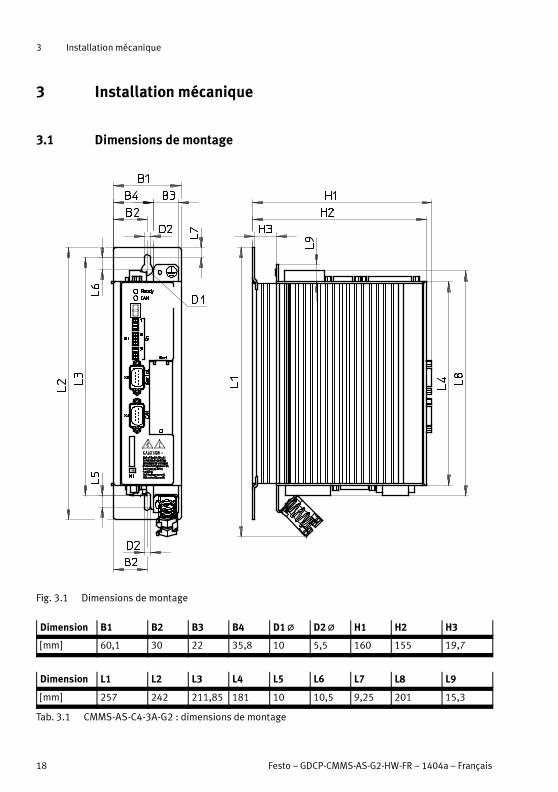
3.1 Dimensions de montage
Fig. 3.1 Dimensions de montage
Dimension B1 B2 B3 B4 D1 @ D2 @ H1 H2 H3
[mm] 60,1 30 22 35,8 10 5,5 160 155 19,7
Dimension L1 L2 L3 L4 L5 L6 L7 L8 L9
[mm] 257 242 211,85 181 10 10,5 9,25 201 15,3
Tab. 3.1 CMMS-AS-C4-3A-G2 : dimensions de montage
3 Installation mécanique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 19
3.2 Montage
AvertissementDanger d'électrocution.
Tout contact avec des pièces conductrices d'électricité peut provoquer des blessures
graves, voire entraîner la mort. Ne pas débrancher les câbles de connexion s'ils sont
sous tension. Avant les travaux de montage et d'installation :
1. Mettre l'équipement électrique hors tension à l'aide de l'interrupteur général, puis
le sécuriser contre toute remise en marche.
2. Suite à l'arrêt de l'appareil, patienter au moins 5 minutes pour le temps de dé-
charge, puis contrôler l'absence de tension avant d'intervenir au niveau du cont-
rôleur de moteur.
AttentionRisque de brûlure sur des surfaces brûlantes
Selon la sollicitation du contrôleur de moteur, des températures du boîtier > 80 °C sont
possibles pendant le fonctionnement.
• Toucher ces surfaces uniquement lorsqu'elles ont refroidi et que l'appareil est hors
tension.
NotaLors du montage et pendant le fonctionnement, s'assurer qu'aucun(e) copeau
métallique, poussière métallique ou pièce de montage (vis, écrous, bouts de câble) ne
tombe dans le contrôleur de moteur.
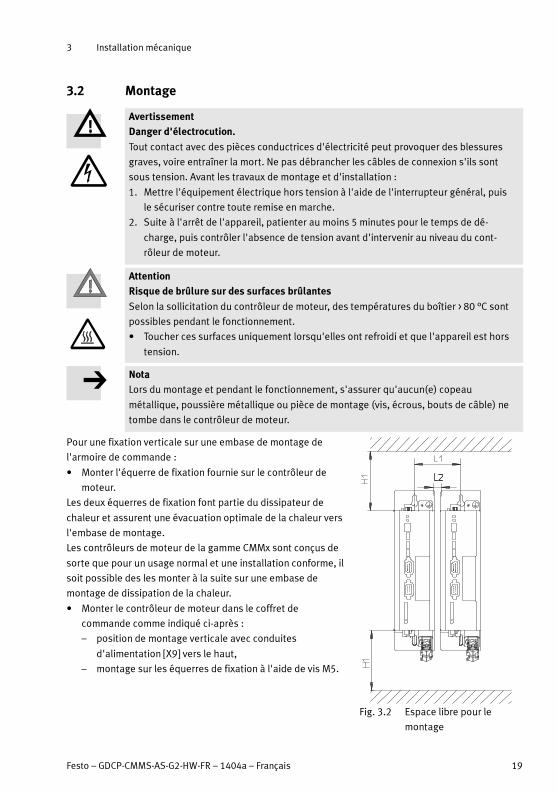
Pour une fixation verticale sur une embase de montage de
l'armoire de commande :
• Monter l'équerre de fixation fournie sur le contrôleur de
moteur.
Les deux équerres de fixation font partie du dissipateur de
chaleur et assurent une évacuation optimale de la chaleur vers
l'embase de montage.
Les contrôleurs de moteur de la gamme CMMx sont conçus de
sorte que pour un usage normal et une installation conforme, il
soit possible des les monter à la suite sur une embase de
montage de dissipation de la chaleur.
• Monter le contrôleur de moteur dans le coffret de
commande comme indiqué ci-après :
– position de montage verticale avec conduites
d'alimentation [X9] vers le haut,
– montage sur les équerres de fixation à l'aide de vis M5.
Fig. 3.2 Espace libre pour le
montage
3 Installation mécanique
20 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
NotaUne surchauffe provoque un vieillissement prématuré ou l'endommagement du cont-
rôleur de moteur.
• Pour une ventilation suffisante, respecter les espaces libres indiqués pour le mon-
tage ( Tab. 3.2).
Espace libre pour le montage H1 1) L1 L2
– Avec une puissance de 400W [mm] 100 70 10
– Avec une puissance nominale de 600W [mm] 100 140 80
1) Recommandation pour un câblage optimal du câble demoteur et du câble de codeur : espace libre de 150 mmpour lemontage H1surla partie inférieure.
Tab. 3.2 Espace libre pour le montage
L'espace libre L1 = 70 mm indiqué pour le montage se base sur une puissance moteur
moyenne en fonctionnement permanent (mode de fonctionnement S1 selon la norme
EN 60034-1). À une puissance supérieure, la distance L1 = 70 mm est suffisante en pré-
sence des conditions préalables suivantes :
– En présence d'une charge de pointe supérieure, le moteur fonctionne en mode service
intermittent (mode S3/S4 selon EN 60034-1 : accélération, déplacement constant
avec une charge plus faible, freinage).
– La ventilation forcée permet d'éviter une surchauffe excessive du contrôleur de
moteur.
3.3 Démontage
AvertissementDanger d'électrocution.
Tout contact avec des pièces conductrices d'électricité peut provoquer des blessures
graves, voire entraîner la mort. Ne pas débrancher les câbles de connexion s'ils sont
sous tension. Avant les travaux de montage et d'installation :
1. Mettre l'équipement électrique hors tension à l'aide de l'interrupteur général, puis
le sécuriser contre toute remise en marche.
2. Suite à l'arrêt de l'appareil, patienter au moins 5 minutes pour le temps de dé-
charge, puis contrôler l'absence de tension avant d'intervenir au niveau du cont-
rôleur de moteur.
AttentionRisque de brûlure sur des surfaces brûlantes
Selon la sollicitation du contrôleur de moteur, des températures du boîtier > 80 °C sont
possibles pendant le fonctionnement.
• Toucher ces surfaces uniquement lorsqu'elles ont refroidi et que l'appareil est hors
tension.
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 21
4 Installation électrique
4.1 Instructions de sécurité
AvertissementDanger d'électrocution
Les contrôleurs de moteur sont des appareils avec un courant de fuite élevé (> 10 mA).
En cas de câblage erroné ou de défaut de l'appareil, des tensions élevées peuvent
apparaître sur le boîtier et provoquer des blessures graves, voire entraîner la mort en
cas de contact avec le boîtier.
• Avant toute mise en service, même pour des besoins temporaires de mesure et
d'essai, raccorder le conducteur de protection PE Fig. 4.4 :
– à la borne de mise à la terre du boîtier du contrôleur,
– à la broche PE [X9.5], alimentation électrique.
La section transversale du conducteur de protection sur PE [X9.5] doit
correspondre au moins à la section transversale du conducteur extérieur L [X9.1].
• Respecter les instructions indiquées dans la norme EN 60204-1 pour la mise à la
terre de protection.
AvertissementDanger d'électrocution
– si le module n'est pas monté ou si la plaque d'obturation n'est pas montée sur l'em-
placement d'enfichage [EXT],
– si aucun câble n'est fixé sur les connecteurs mâles [X6] et [X9],
– si des câbles de connexion sous tension sont déconnectés.
Tout contact avec des pièces conductrices d'électricité peut provoquer des blessures
graves, au risque d'entraîner la mort. Avant les travaux de montage et d'installation :
1. Mettre l'équipement électrique hors tension à l'aide de l'interrupteur général, puis
le sécuriser contre toute remise en marche.
2. Suite à l'arrêt de l'appareil, patienter au moins 5 minutes pour le temps de dé-
charge, puis contrôler l'absence de tension avant d'intervenir au niveau du cont-
rôleur de moteur.
AvertissementDanger d'électrocution
Ce produit peut provoquer un courant continu dans le câble de mise à la terre de protec-
tion. Dans les endroits où unmoyen de protection contre le courant de défaut (RCD) ou
un appareil de surveillance du courant de défaut (RCM) est utilisé comme protection en
cas de contact direct ou indirect, seul un RCD ou RCM de type B est autorisé, sur le côté
alimentation électrique de ce produit.
4 Installation électrique
22 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
AttentionDanger dû au mouvement inattendu
Des câbles de confection incorrecte peuvent endommager l'électronique et déclencher
des mouvements imprévus du moteur.
• Pour le câblage du système, utiliser exclusivement les connecteurs mâles fournis et
de préférence les câbles indiqués dans le catalogue dans la liste des accessoires.
www.festo.com/catalogue
• Poser tous les câbles mobiles sans les plier et sans exercer de contrainte mé-
canique, si nécessaire utiliser une chaîne porte-câbles.
NotaDu fait des connecteurs non affectés, il existe un risque de dommage dû aux décharges
électrostatiques (DES) sur l'appareil ou sur d'autres parties de l'installation.
• Avant l'installation : Mettre à la terre toutes les parties de l'installation et utiliser
des équipements DES adaptés (chaussures, bandes de mise à la terre, etc.).
• Après l'installation : Obturer les connecteurs mâles sub-D non affectés à l'aide de
capuchons de protection (disponible dans le commerce).
• Respecter les consignes de manipulation des composants sensibles aux charges
électrostatiques.
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 23
4.2 Remarques relatives à une installation sûre et conforme auxexigences CEM
Les contrôleurs de moteur CMMS-AS-C4-3A-G2 ont été certifiés conformes aux exigences
de la norme produit EN 61800-3 applicable aux actionneurs électriques. À cette fin, des
composants Festo ont été utilisés (comme les câbles pour le moteur ou le codeur).
La déclaration de conformité à la directive CEM (compatibilité électromagnétique) est
disponible à l'adressewww.festo.com.
4.2.1 Immunité aux perturbations et émissions perturbatricesAfin d'améliorer l'immunité aux perturbations et de limiter l'émission de perturbations, des selfs
moteur et des filtres secteur sont intégrés au contrôleur de moteur CMMS-AS-C4-3A-G2, de façon à
permettre l'utilisation du contrôleur de moteur dans la plupart des applications sans dispositif de blin-
dage ou de filtrage supplémentaire.
Lorsqu'ils sont montés correctement et que tous les câbles de connexion ( Chap. 4.2.2) sont rac-
cordés de manière appropriée, le contrôleur de moteur est conforme à la norme produit EN 61800-3
pour les domaines d'application suivants :
Domaine d'application admissible
Émission de perturbations Deuxième environnement (industrie)1)
Immunité aux perturbations Deuxième environnement (industrie)1)
1) Sites à l'extérieur des zones d'habitations ou des zones industrielles, alimentés par l'intermédiaire d'un transformateur propre à
partir d'un réseau moyenne tension.
Tab. 4.1 Domaine d'application admissible selon la norme EN 61800-3
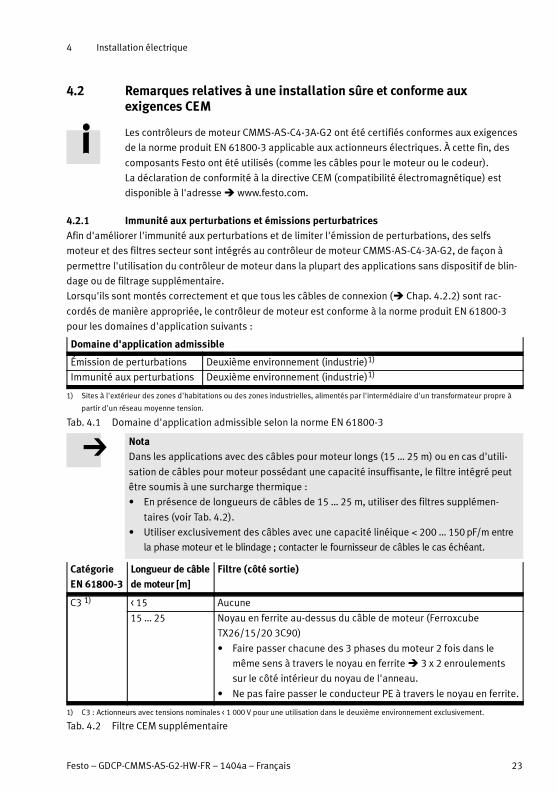
NotaDans les applications avec des câbles pour moteur longs (15 … 25 m) ou en cas d'utili-
sation de câbles pour moteur possédant une capacité insuffisante, le filtre intégré peut
être soumis à une surcharge thermique :
• En présence de longueurs de câbles de 15 … 25 m, utiliser des filtres supplémen-
taires (voir Tab. 4.2).
• Utiliser exclusivement des câbles avec une capacité linéique < 200 … 150pF/m entre
la phase moteur et le blindage ; contacter le fournisseur de câbles le cas échéant.
CatégorieEN 61800-3
Longueur de câblede moteur [m]
Filtre (côté sortie)
C3 1) < 15 Aucune
15 … 25 Noyau en ferrite au-dessus du câble de moteur (Ferroxcube
TX26/15/20 3C90)
• Faire passer chacune des 3 phases du moteur 2 fois dans le
même sens à travers le noyau en ferrite 3 x 2 enroulements
sur le côté intérieur du noyau de l'anneau.
• Ne pas faire passer le conducteur PE à travers le noyau en ferrite.
1) C3 : Actionneurs avec tensions nominales < 1 000 V pour une utilisation dans le deuxième environnement exclusivement.
Tab. 4.2 Filtre CEM supplémentaire
4 Installation électrique
24 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
4.2.2 Câblage respectant la CEM
Pose des câbles :
– ne pas poser les câbles de signalisation parallèlement aux câbles de puissance,
– la distance entre les câbles de signalisation et les câbles de puissance doit être d'au
moins 25 cm,
– éviter les croisements avec les câbles de puissance ou les réaliser à angle droit.
Blindage :
– réaliser toujours les câbles pour moteur et les câbles de codeur avec un blindage,
– vriller les câbles de signalisation non blindés,
– pour les câbles blindés avec un boîtier de connecteur mâle non blindé : La longueur
des conducteurs non blindés à la fin du câble ne doit pas dépasser 35 mm.
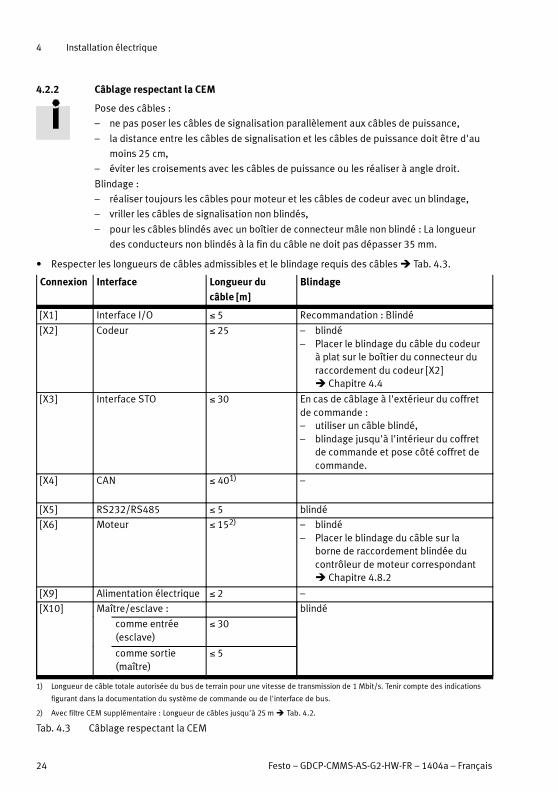
• Respecter les longueurs de câbles admissibles et le blindage requis des câbles Tab. 4.3.
Connexion Interface Longueur ducâble [m]
Blindage
[X1] Interface I/O ≤ 5 Recommandation : Blindé
[X2] Codeur ≤ 25 – blindé– Placer le blindage du câble du codeur
à plat sur le boîtier du connecteur duraccordement du codeur [X2] Chapitre 4.4
[X3] Interface STO ≤ 30 En cas de câblage à l'extérieur du coffretde commande :– utiliser un câble blindé,– blindage jusqu'à l'intérieur du coffret
de commande et pose côté coffret decommande.
[X4] CAN ≤ 401) –
[X5] RS232/RS485 ≤ 5 blindé
[X6] Moteur ≤ 152) – blindé– Placer le blindage du câble sur la
borne de raccordement blindée ducontrôleur de moteur correspondant Chapitre 4.8.2
[X9] Alimentation électrique ≤ 2 –
[X10] Maître/esclave : blindé
comme entrée(esclave)
≤ 30
comme sortie(maître)
≤ 5
1) Longueur de câble totale autorisée du bus de terrain pour une vitesse de transmission de 1 Mbit/s. Tenir compte des indications
figurant dans la documentation du système de commande ou de l'interface de bus.
2) Avec filtre CEM supplémentaire : Longueur de câbles jusqu'à 25 m Tab. 4.2.
Tab. 4.3 Câblage respectant la CEM
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 25
En cas d'utilisation de câbles pour moteur d'autres fabricants :
• Utiliser exclusivement des câbles pour moteur sur lesquels le câble pour le capteur de température
(MT–, MT+) et le câble pour le frein de maintien (BR–, BR+) sont torsadés par paires et blindés
( Tab. 4.20).
4.2.3 Mise à la terre de protection du contrôleur de moteur
AvertissementDanger d'électrocution
Les contrôleurs de moteur sont des appareils avec un courant de fuite élevé (> 10 mA).
En cas de câblage erroné ou de défaut de l'appareil, des tensions élevées peuvent
apparaître sur le boîtier et provoquer des blessures graves, voire entraîner la mort en
cas de contact avec le boîtier.
• Avant toute mise en service, même pour des besoins temporaires de mesure et
d'essai, raccorder le conducteur de protection PE Fig. 4.4 :
– à la borne de mise à la terre du boîtier du contrôleur,
– à la broche PE [X9.5], alimentation électrique.
La section transversale du conducteur de protection sur PE [X9.5] doit
correspondre au moins à la section transversale du conducteur extérieur L [X9.1].
• Respecter les instructions indiquées dans la norme EN 60204-1 pour la mise à la
terre de protection.
4.2.4 Mise à la terre de protection du moteur
AvertissementDanger d'électrocution
Le moteur raccordé et le câble pour moteur transportent des courants de fuites élevés.
Une mise à la terre réalisée de manière non conforme peut provoquer des tensions
dangereuses et des pannes dues à la compatibilité électromagnétique.
• Raccorder le conducteur PE du câble pour moteur au raccordement PE [X6.5]
Chapitre 4.8.2
• Placer le blindage du câble pour moteur sur la borne de raccordement blindée du
contrôleur de moteur Chapitre 4.8.2.
• Placer le blindage du câble du codeur à plat sur le boîtier du connecteur du rac-
cordement [X2] Chapitre 4.4.
4 Installation électrique
26 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
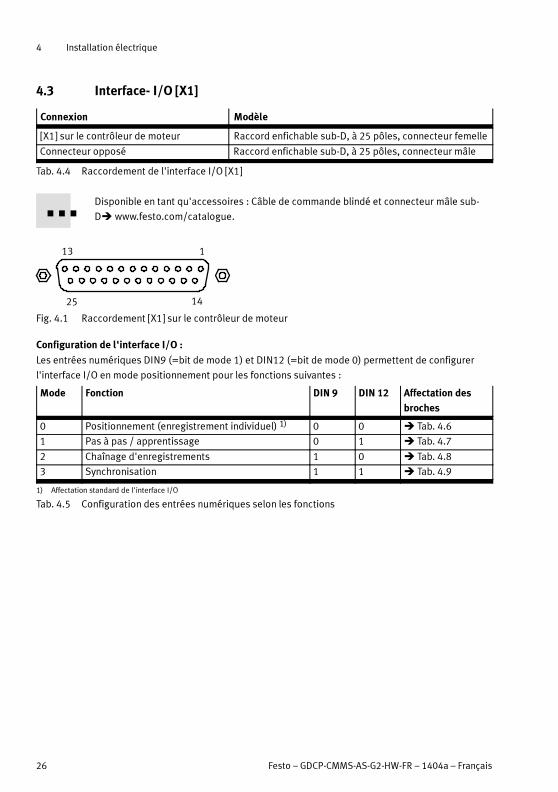
4.3 Interface- I/O [X1]
Connexion Modèle
[X1] sur le contrôleur de moteur Raccord enfichable sub-D, à 25 pôles, connecteur femelle
Connecteur opposé Raccord enfichable sub-D, à 25 pôles, connecteur mâle
Tab. 4.4 Raccordement de l'interface I/O [X1]
Disponible en tant qu'accessoires : Câble de commande blindé et connecteur mâle sub-
Dwww.festo.com/catalogue.
113
1425
Fig. 4.1 Raccordement [X1] sur le contrôleur de moteur
Configuration de l'interface I/O :
Les entrées numériques DIN9 (=bit de mode 1) et DIN12 (=bit de mode 0) permettent de configurer
l'interface I/O en mode positionnement pour les fonctions suivantes :
Mode Fonction DIN 9 DIN 12 Affectation desbroches
0 Positionnement (enregistrement individuel) 1) 0 0 Tab. 4.6
1 Pas à pas / apprentissage 0 1 Tab. 4.7
2 Chaînage d'enregistrements 1 0 Tab. 4.8
3 Synchronisation 1 1 Tab. 4.9
1) Affectation standard de l'interface I/O
Tab. 4.5 Configuration des entrées numériques selon les fonctions
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 27
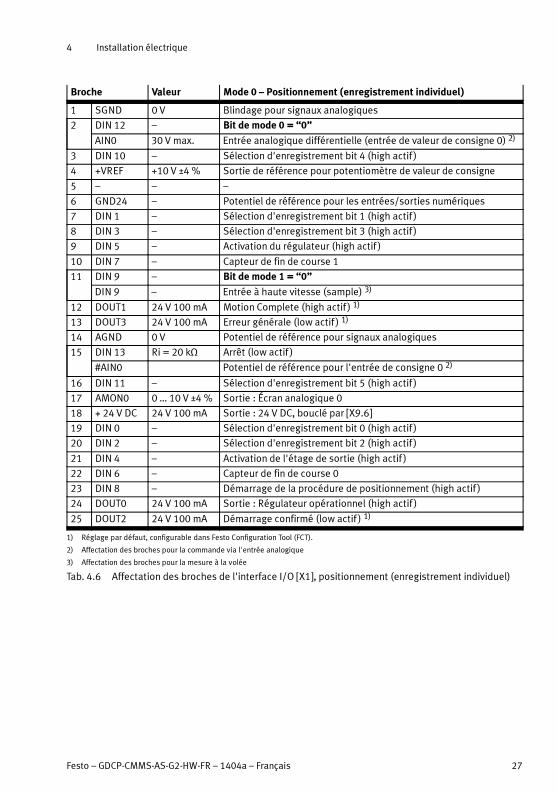
Broche Valeur Mode 0 – Positionnement (enregistrement individuel)
1 SGND 0 V Blindage pour signaux analogiques
2 DIN 12 – Bit de mode 0 = “0”
AIN0 30 V max. Entrée analogique différentielle (entrée de valeur de consigne 0) 2)
3 DIN 10 – Sélection d'enregistrement bit 4 (high actif )
4 +VREF +10 V ±4 % Sortie de référence pour potentiomètre de valeur de consigne
5 – – –
6 GND24 – Potentiel de référence pour les entrées/sorties numériques
7 DIN 1 – Sélection d'enregistrement bit 1 (high actif )
8 DIN 3 – Sélection d'enregistrement bit 3 (high actif )
9 DIN 5 – Activation du régulateur (high actif )
10 DIN 7 – Capteur de fin de course 1
11 DIN 9 – Bit de mode 1 = “0”
DIN 9 – Entrée à haute vitesse (sample) 3)
12 DOUT1 24 V 100 mA Motion Complete (high actif ) 1)
13 DOUT3 24 V 100 mA Erreur générale (low actif ) 1)
14 AGND 0 V Potentiel de référence pour signaux analogiques
15 DIN 13 Ri = 20 kΩ Arrêt (low actif )
#AIN0 Potentiel de référence pour l'entrée de consigne 0 2)
16 DIN 11 – Sélection d'enregistrement bit 5 (high actif )
17 AMON0 0 … 10 V ±4 % Sortie : Écran analogique 0
18 + 24 V DC 24 V 100 mA Sortie : 24 V DC, bouclé par [X9.6]
19 DIN 0 – Sélection d'enregistrement bit 0 (high actif )
20 DIN 2 – Sélection d'enregistrement bit 2 (high actif )
21 DIN 4 – Activation de l'étage de sortie (high actif )
22 DIN 6 – Capteur de fin de course 0
23 DIN 8 – Démarrage de la procédure de positionnement (high actif )
24 DOUT0 24 V 100 mA Sortie : Régulateur opérationnel (high actif )
25 DOUT2 24 V 100 mA Démarrage confirmé (low actif ) 1)
1) Réglage par défaut, configurable dans Festo Configuration Tool (FCT).
2) Affectation des broches pour la commande via l'entrée analogique
3) Affectation des broches pour la mesure à la volée
Tab. 4.6 Affectation des broches de l'interface I/O [X1], positionnement (enregistrement individuel)
4 Installation électrique
28 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
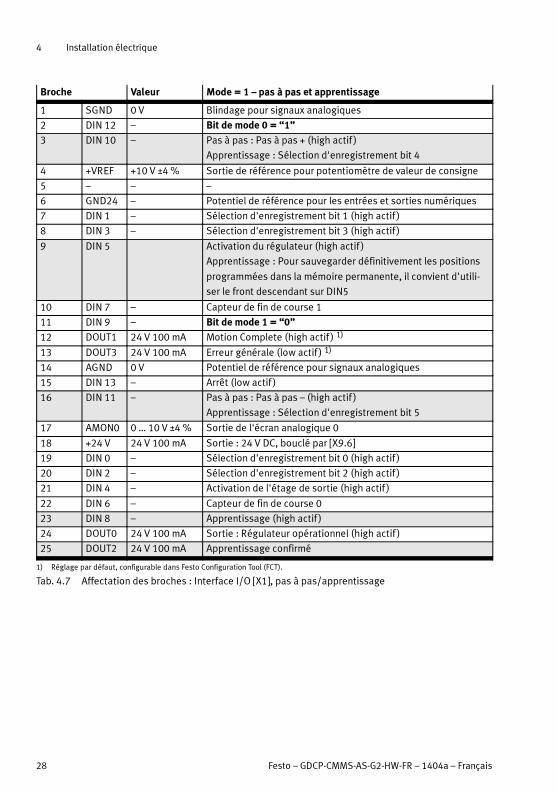
Broche Valeur Mode = 1 – pas à pas et apprentissage
1 SGND 0 V Blindage pour signaux analogiques
2 DIN 12 – Bit de mode 0 = “1”3 DIN 10 – Pas à pas : Pas à pas + (high actif )
Apprentissage : Sélection d'enregistrement bit 4
4 +VREF +10 V ±4 % Sortie de référence pour potentiomètre de valeur de consigne
5 – – –
6 GND24 – Potentiel de référence pour les entrées et sorties numériques
7 DIN 1 – Sélection d'enregistrement bit 1 (high actif )
8 DIN 3 – Sélection d'enregistrement bit 3 (high actif )
9 DIN 5 Activation du régulateur (high actif )
Apprentissage : Pour sauvegarder définitivement les positions
programmées dans la mémoire permanente, il convient d'utili-
ser le front descendant sur DIN5
10 DIN 7 – Capteur de fin de course 1
11 DIN 9 – Bit de mode 1 = “0”12 DOUT1 24 V 100 mA Motion Complete (high actif ) 1)
13 DOUT3 24 V 100 mA Erreur générale (low actif ) 1)
14 AGND 0 V Potentiel de référence pour signaux analogiques
15 DIN 13 – Arrêt (low actif )
16 DIN 11 – Pas à pas : Pas à pas – (high actif )
Apprentissage : Sélection d'enregistrement bit 5
17 AMON0 0 … 10 V ±4 % Sortie de l'écran analogique 0
18 +24 V 24 V 100 mA Sortie : 24 V DC, bouclé par [X9.6]
19 DIN 0 – Sélection d'enregistrement bit 0 (high actif )
20 DIN 2 – Sélection d'enregistrement bit 2 (high actif )
21 DIN 4 – Activation de l'étage de sortie (high actif )
22 DIN 6 – Capteur de fin de course 0
23 DIN 8 – Apprentissage (high actif )
24 DOUT0 24 V 100 mA Sortie : Régulateur opérationnel (high actif )
25 DOUT2 24 V 100 mA Apprentissage confirmé
1) Réglage par défaut, configurable dans Festo Configuration Tool (FCT).
Tab. 4.7 Affectation des broches : Interface I/O [X1], pas à pas/apprentissage
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 29
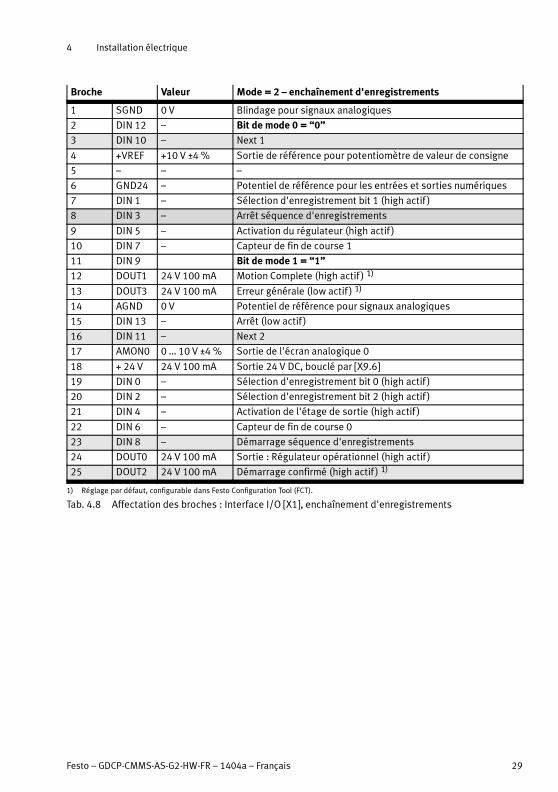
Broche Valeur Mode = 2 – enchaînement d'enregistrements
1 SGND 0 V Blindage pour signaux analogiques
2 DIN 12 – Bit de mode 0 = “0”3 DIN 10 – Next 1
4 +VREF +10 V ±4 % Sortie de référence pour potentiomètre de valeur de consigne
5 – – –
6 GND24 – Potentiel de référence pour les entrées et sorties numériques
7 DIN 1 – Sélection d'enregistrement bit 1 (high actif )
8 DIN 3 – Arrêt séquence d'enregistrements
9 DIN 5 – Activation du régulateur (high actif )
10 DIN 7 – Capteur de fin de course 1
11 DIN 9 Bit de mode 1 = “1”12 DOUT1 24 V 100 mA Motion Complete (high actif ) 1)
13 DOUT3 24 V 100 mA Erreur générale (low actif ) 1)
14 AGND 0 V Potentiel de référence pour signaux analogiques
15 DIN 13 – Arrêt (low actif )
16 DIN 11 – Next 2
17 AMON0 0 … 10 V ±4 % Sortie de l'écran analogique 0
18 + 24 V 24 V 100 mA Sortie 24 V DC, bouclé par [X9.6]
19 DIN 0 – Sélection d'enregistrement bit 0 (high actif )
20 DIN 2 – Sélection d'enregistrement bit 2 (high actif )
21 DIN 4 – Activation de l'étage de sortie (high actif )
22 DIN 6 – Capteur de fin de course 0
23 DIN 8 – Démarrage séquence d'enregistrements
24 DOUT0 24 V 100 mA Sortie : Régulateur opérationnel (high actif )
25 DOUT2 24 V 100 mA Démarrage confirmé (high actif ) 1)
1) Réglage par défaut, configurable dans Festo Configuration Tool (FCT).
Tab. 4.8 Affectation des broches : Interface I/O [X1], enchaînement d'enregistrements
4 Installation électrique
30 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
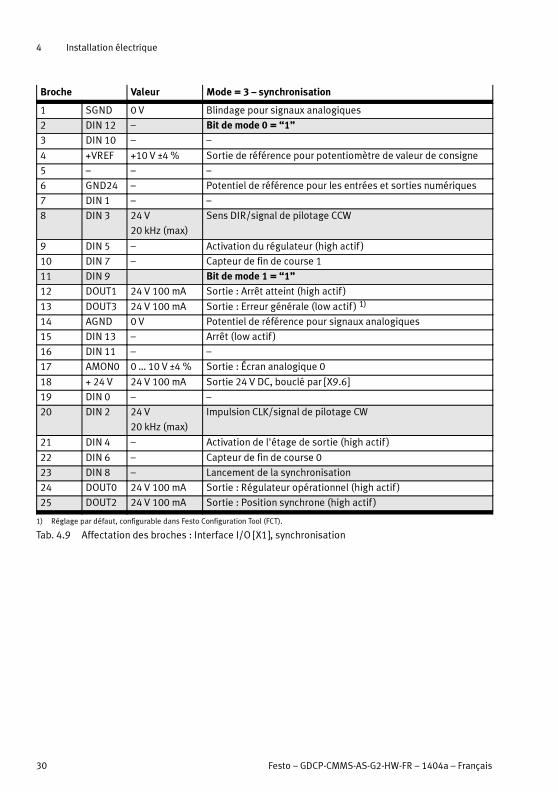
Broche Valeur Mode = 3 – synchronisation
1 SGND 0 V Blindage pour signaux analogiques
2 DIN 12 – Bit de mode 0 = “1”3 DIN 10 – –
4 +VREF +10 V ±4 % Sortie de référence pour potentiomètre de valeur de consigne
5 – – –
6 GND24 – Potentiel de référence pour les entrées et sorties numériques
7 DIN 1 – –
8 DIN 3 24 V
20 kHz (max)
Sens DIR/signal de pilotage CCW
9 DIN 5 – Activation du régulateur (high actif )
10 DIN 7 – Capteur de fin de course 1
11 DIN 9 Bit de mode 1 = “1”12 DOUT1 24 V 100 mA Sortie : Arrêt atteint (high actif )
13 DOUT3 24 V 100 mA Sortie : Erreur générale (low actif ) 1)
14 AGND 0 V Potentiel de référence pour signaux analogiques
15 DIN 13 – Arrêt (low actif )
16 DIN 11 – –
17 AMON0 0 … 10 V ±4 % Sortie : Écran analogique 0
18 + 24 V 24 V 100 mA Sortie 24 V DC, bouclé par [X9.6]
19 DIN 0 – –
20 DIN 2 24 V
20 kHz (max)
Impulsion CLK/signal de pilotage CW
21 DIN 4 – Activation de l'étage de sortie (high actif )
22 DIN 6 – Capteur de fin de course 0
23 DIN 8 – Lancement de la synchronisation
24 DOUT0 24 V 100 mA Sortie : Régulateur opérationnel (high actif )
25 DOUT2 24 V 100 mA Sortie : Position synchrone (high actif )
1) Réglage par défaut, configurable dans Festo Configuration Tool (FCT).
Tab. 4.9 Affectation des broches : Interface I/O [X1], synchronisation
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 31
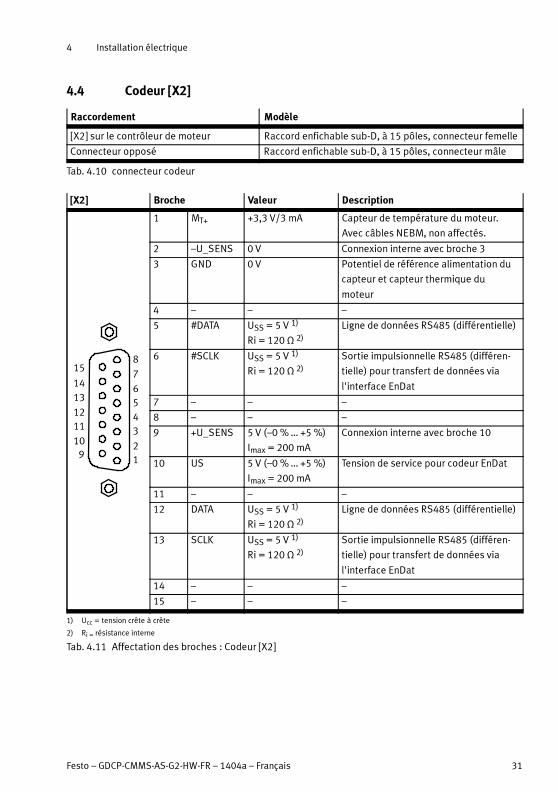
4.4 Codeur [X2]
Raccordement Modèle
[X2] sur le contrôleur de moteur Raccord enfichable sub-D, à 15 pôles, connecteur femelle
Connecteur opposé Raccord enfichable sub-D, à 15 pôles, connecteur mâle
Tab. 4.10 connecteur codeur
[X2] Broche Valeur Description
12
3456
7
8
910
1112
1314
15
1 MT+ +3,3 V/3 mA Capteur de température du moteur.
Avec câbles NEBM, non affectés.
2 –U_SENS 0 V Connexion interne avec broche 3
3 GND 0 V Potentiel de référence alimentation du
capteur et capteur thermique du
moteur
4 – – –
5 #DATA USS = 5 V 1)
Ri = 120 Ω 2)
Ligne de données RS485 (différentielle)
6 #SCLK USS = 5 V 1)
Ri = 120 Ω 2)
Sortie impulsionnelle RS485 (différen-
tielle) pour transfert de données via
l'interface EnDat
7 – – –
8 – – –
9 +U_SENS 5 V (–0 %… +5 %)
Imax = 200 mA
Connexion interne avec broche 10
10 US 5 V (–0 %… +5 %)
Imax = 200 mA
Tension de service pour codeur EnDat
11 – – –
12 DATA USS = 5 V 1)
Ri = 120 Ω 2)
Ligne de données RS485 (différentielle)
13 SCLK USS = 5 V 1)
Ri = 120 Ω 2)
Sortie impulsionnelle RS485 (différen-
tielle) pour transfert de données via
l'interface EnDat
14 – – –
15 – – –
1) Ucc = tension crête à crête
2) Ri = résistance interne
Tab. 4.11 Affectation des broches : Codeur [X2]
4 Installation électrique
32 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
Le codeur angulaire monté sur l'arbre du moteur est utilisé pour la commutation du moteur synchrone
triphasé et en tant que système d'enregistrement de valeur réelle pour le régulateur de vitesse et le
régulateur de position intégré. En fonction du type de moteur, les codeurs suivants sont pris en charge :
– codeurs de valeurs absolues (monotour, multitours),
– interface numérique EnDat 2.1 ou 2.2, informations angulaires numériques exclusivement (les sig-
naux analogiques, SIN, COS, des codeurs ne sont pas pris en charge),
– intensité absorbée maximale de 200 mA.
La tension d'alimentation du codeur est dérivée de l'alimentation logique interne +5 V. La tolérance
pour la tension d'alimentation a été réduite. Les chutes de tension sur le câble de raccordement ne
sont pas régulées.
Utilisation de câbles de fabricants tiers– Câblage double du câble d'alimentation :
En fonction de l'intensité absorbée et de la longueur de câbles, le câblage des câbles
d'alimentation doit être doublé. Exemple :
Dans le cas d'un câblage de codeur avec une section transversale de câble de
0,5 mm2, une longueur de câble de 25 m (50 pour les deux câbles aller et retour), une
intensité absorbée de 200 mA, la chute de tension en cas de câblage simple est de
Udiff ~ 0,36 V. Un câblage double est donc nécessaire (Udiff ~ 0,18 V).
– Blindage :
• Le câble du codeur doit être blindé
• Vriller par paire les câbles de signalisation différentiels (non blindés)
(DATA/#DATA, SCLK/#SCLK, +5 V/0 V)
• Placer le blindage côté moteur et côté contrôleur sur le boîtier de connecteur mâle
Pour une immunité aux perturbations maximale :
• Utiliser un câble avec des paires de fils torsadées et blindées
• Réaliser les blindages de câble des paires blindées (blindages internes) avec une
séparation galvanique par rapport au blindage externe et les mettre en place sur le
raccordement [X2.3] uniquement côté régulateur
• Placer le blindage complet côté moteur et côté contrôleur sur le boîtier de connec-
teur mâle.
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 33
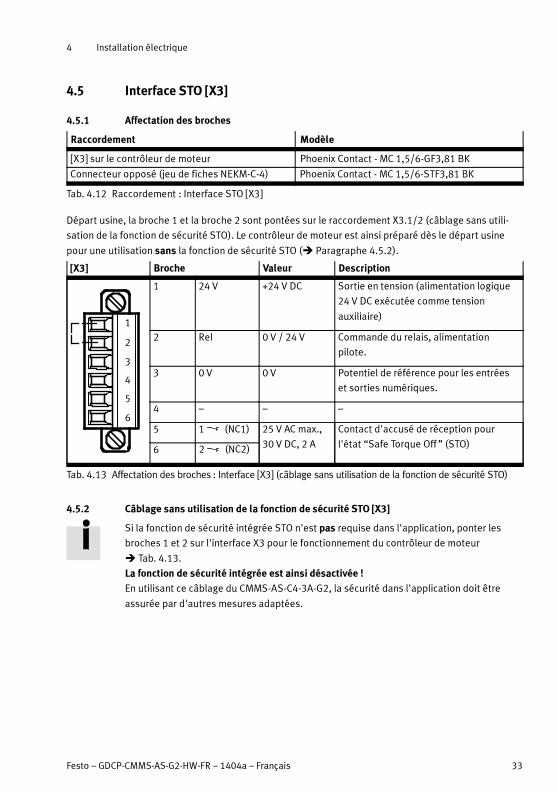
4.5 Interface STO [X3]
4.5.1 Affectation des broches
Raccordement Modèle
[X3] sur le contrôleur de moteur Phoenix Contact - MC 1,5/6-GF3,81 BK
Connecteur opposé (jeu de fiches NEKM-C-4) Phoenix Contact - MC 1,5/6-STF3,81 BK
Tab. 4.12 Raccordement : Interface STO [X3]
Départ usine, la broche 1 et la broche 2 sont pontées sur le raccordement X3.1/2 (câblage sans utili-
sation de la fonction de sécurité STO). Le contrôleur de moteur est ainsi préparé dès le départ usine
pour une utilisation sans la fonction de sécurité STO ( Paragraphe 4.5.2).
[X3] Broche Valeur Description
1
2
3
4
5
6
1 24 V +24 V DC Sortie en tension (alimentation logique
24 V DC exécutée comme tension
auxiliaire)
2 Rel 0 V / 24 V Commande du relais, alimentation
pilote.
3 0 V 0 V Potentiel de référence pour les entrées
et sorties numériques.
4 – – –
5 1 (NC1) 25 V AC max.,
30 V DC, 2 A
Contact d'accusé de réception pour
l'état “Safe Torque Off ” (STO)6 2 (NC2)
Tab. 4.13 Affectation des broches : Interface [X3] (câblage sans utilisation de la fonction de sécurité STO)
4.5.2 Câblage sans utilisation de la fonction de sécurité STO [X3]
Si la fonction de sécurité intégrée STO n'est pas requise dans l'application, ponter lesbroches 1 et 2 sur l'interface X3 pour le fonctionnement du contrôleur de moteur
Tab. 4.13.
La fonction de sécurité intégrée est ainsi désactivée !En utilisant ce câblage du CMMS-AS-C4-3A-G2, la sécurité dans l'application doit être
assurée par d'autres mesures adaptées.
4 Installation électrique
34 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
4.5.3 Câblage en cas d'utilisation de la fonction de sécurité STO [X3]
La fonction de sécurité ne protège pas contre une électrocution mais uniquement contre
des mouvements dangereux. Tenir compte des informations relatives à l'usage normal de
la fonction de sécurité STO – “Safe Torque Off ” ( Description Fonction de sécurité STO,
GDCP-CMMS-AS-G2-S1-...).
Si la fonction de sécurité intégrée STO est requise dans l'application, retirer le pontage entre les
broches 1 et 2 sur l'interface X3 pour le fonctionnement du contrôleur de moteur Tab. 4.13.
Recommandation lors de la première mise en service sans technique de sécurité :Câblage minimal avec commande d'arrêt d'urgence et coupure à deux canaux via les entrées de pi-
lotage :
– REL [X3.2],
– DIN4 [X1.21].
NotaPerte de la fonction de sécurité.
Une fonction de sécurité manquante peut entraîner de graves et irréversibles blessures,
notamment en cas de mouvements incontrôlés des actionneurs reliés. Le pontage de
dispositifs de sécurité n'est pas autorisé.
• S'assurer que des ponts ou autres ne peuvent être installés parallèlement à un câb-
lage de sécurité, en utilisant notamment des sections de conducteur maximale ou
des cosses appropriées munies de gaine d'isolation.
• Pour le bouclage de câble entre des appareils rapprochés, utiliser des cosses
doubles.
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 35
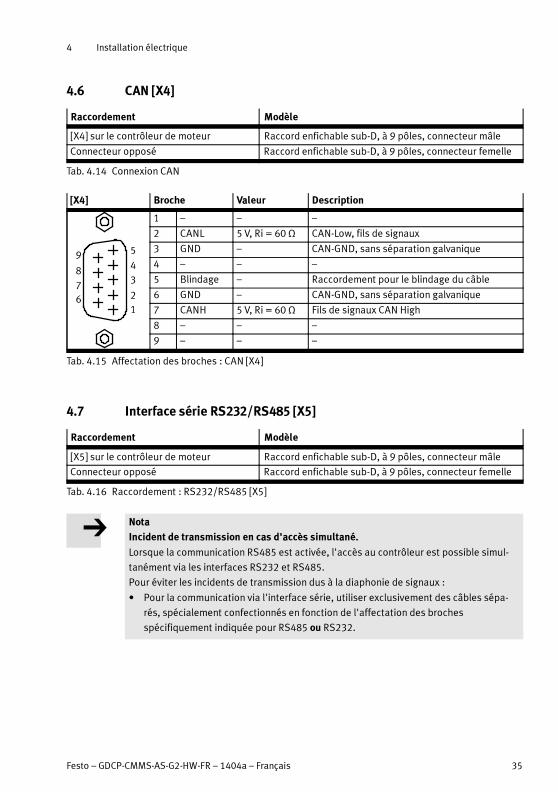
4.6 CAN [X4]
Raccordement Modèle
[X4] sur le contrôleur de moteur Raccord enfichable sub-D, à 9 pôles, connecteur mâle
Connecteur opposé Raccord enfichable sub-D, à 9 pôles, connecteur femelle
Tab. 4.14 Connexion CAN
[X4] Broche Valeur Description
5
12
3
4
67
8
9
1 – – –
2 CANL 5 V, Ri = 60 Ω CAN-Low, fils de signaux
3 GND – CAN-GND, sans séparation galvanique
4 – – –
5 Blindage – Raccordement pour le blindage du câble
6 GND – CAN-GND, sans séparation galvanique
7 CANH 5 V, Ri = 60 Ω Fils de signaux CAN High
8 – – –
9 – – –
Tab. 4.15 Affectation des broches : CAN [X4]
4.7 Interface série RS232/RS485 [X5]
Raccordement Modèle
[X5] sur le contrôleur de moteur Raccord enfichable sub-D, à 9 pôles, connecteur mâle
Connecteur opposé Raccord enfichable sub-D, à 9 pôles, connecteur femelle
Tab. 4.16 Raccordement : RS232/RS485 [X5]
NotaIncident de transmission en cas d'accès simultané.
Lorsque la communication RS485 est activée, l'accès au contrôleur est possible simul-
tanément via les interfaces RS232 et RS485.
Pour éviter les incidents de transmission dus à la diaphonie de signaux :
• Pour la communication via l'interface série, utiliser exclusivement des câbles sépa-
rés, spécialement confectionnés en fonction de l'affectation des broches
spécifiquement indiquée pour RS485 ou RS232.
4 Installation électrique
36 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
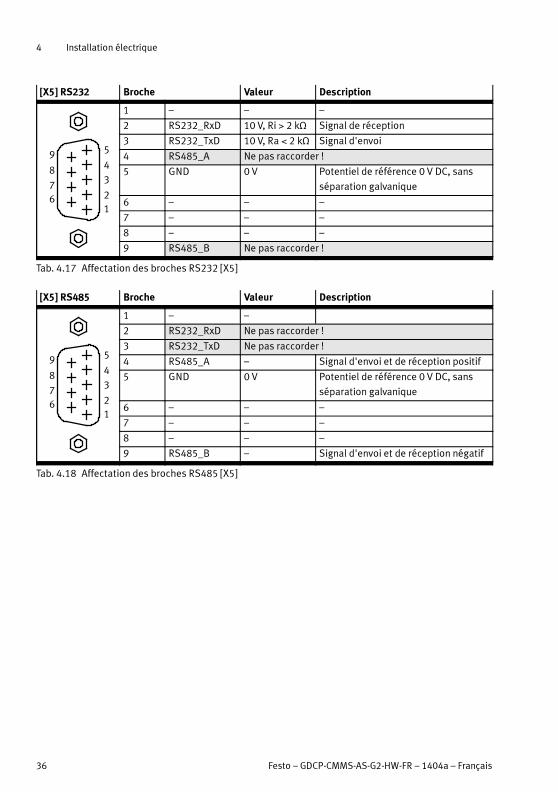
[X5] RS232 Broche Valeur Description
5
12
3
4
67
8
9
1 – – –
2 RS232_RxD 10 V, Ri > 2 kΩ Signal de réception
3 RS232_TxD 10 V, Ra < 2 kΩ Signal d'envoi
4 RS485_A Ne pas raccorder !
5 GND 0 V Potentiel de référence 0 V DC, sans
séparation galvanique
6 – – –
7 – – –
8 – – –
9 RS485_B Ne pas raccorder !
Tab. 4.17 Affectation des broches RS232 [X5]
[X5] RS485 Broche Valeur Description
5
12
3
4
67
8
9
1 – –
2 RS232_RxD Ne pas raccorder !
3 RS232_TxD Ne pas raccorder !
4 RS485_A – Signal d'envoi et de réception positif
5 GND 0 V Potentiel de référence 0 V DC, sans
séparation galvanique
6 – – –
7 – – –
8 – – –
9 RS485_B – Signal d'envoi et de réception négatif
Tab. 4.18 Affectation des broches RS485 [X5]
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 37
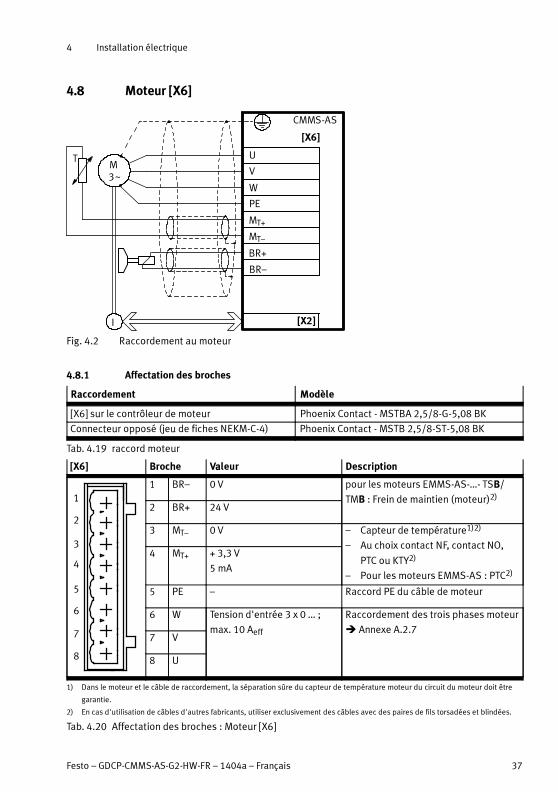
4.8 Moteur [X6]
U
V
W
PE
MT+
MT–
BR+
BR–
I
M3~
T
[X6]
[X2]
CMMS-AS
Fig. 4.2 Raccordement au moteur
4.8.1 Affectation des broches
Raccordement Modèle
[X6] sur le contrôleur de moteur Phoenix Contact - MSTBA 2,5/8-G-5,08 BK
Connecteur opposé (jeu de fiches NEKM-C-4) Phoenix Contact - MSTB 2,5/8-ST-5,08 BK
Tab. 4.19 raccord moteur
[X6] Broche Valeur Description
1
2
3
4
5
6
7
8
1 BR– 0 V pour les moteurs EMMS-AS-…- TSB/TMB : Frein de maintien (moteur)2)
2 BR+ 24 V
3 MT– 0 V – Capteur de température1)2)
– Au choix contact NF, contact NO,
PTC ou KTY2)
– Pour les moteurs EMMS-AS : PTC2)
4 MT+ + 3,3 V
5 mA
5 PE – Raccord PE du câble de moteur
6 W Tension d'entrée 3 x 0 … ;
max. 10 Aeff
Raccordement des trois phases moteur
Annexe A.2.77 V
8 U
1) Dans le moteur et le câble de raccordement, la séparation sûre du capteur de température moteur du circuit du moteur doit être
garantie.
2) En cas d'utilisation de câbles d'autres fabricants, utiliser exclusivement des câbles avec des paires de fils torsadées et blindées.
Tab. 4.20 Affectation des broches : Moteur [X6]
4 Installation électrique
38 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
4.8.2 Raccordement du blindage du câble pour moteur
En cas d'utilisation de câbles d'autres fabricants : Placer l'ensemble du blindage du câble
côté moteur sur le boîtier du connecteur mâle ou sur le carter du moteur. Longueur maxi-
male 40 mm
• Placer l'ensemble du blindage du câble pour moteur sur la borne de raccordement blindée du cont-
rôleur de moteur correspondant, afin que les courants de fuite puissent retourner dans le ré-
gulateur dont ils proviennent.
• Ne pas utiliser l'ensemble du blindage comme décharge de traction
Pour d'autres remarques concernant le câblage conforme CEM du moteur Chapitre 4.2.1.
4.8.3 Raccordement d'un frein de maintien
Les freins de maintien ne sont pas adaptés pour le freinage du moteur. Il servent au
maintien fonctionnel de l'arbre du moteur. Pour une utilisation dans des applications
axées sur la sécurité, il est nécessaire de prendre des mesures supplémentaires.
AvertissementLe frein de maintien intégré dans le moteur ou un frein de maintien externe commandé
par le contrôleur de moteur n'est pas prévu pour la protection des personnes !
• Il convient de prévoir un dispositif contre le détachement ou la chute des axes
verticaux après la mise hors circuit du moteur, notamment avec :
– un verrouillage mécanique des axes verticaux,
– un dispositif externe de freinage/prise/serrage ou
– un contrepoids suffisant sur les axes.
• Raccorder le frein de maintien aux bornes BR+ [X6.2] et BR- [X6.1]. Ce frein est alimenté via l'alimen-
tation logique du contrôleur de moteur.
NotaSi le moteur est chaud et que la tension d'alimentation est trop faible (en dehors des
tolérances), le frein de maintien du moteur risque de ne pas s'ouvrir totalement.
Conséquence : Usure prématurée du frein.
• S'assurer que les tolérances de tension de la tension nominale au niveau des bornes
de raccordement du frein de maintien sont respectées ( Tab. A.9, alimentation
logique).
• Tenir compte du courant de sortie maximal fourni par le contrôleur de moteur ( Tab. A.9).
En cas de consommation de courant supérieur, brancher un relais entre le contrôleur et le frein de
maintien.
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 39
+24 V
GND
+24 V
GND
2
3
4
4
5
BR+
BR -
1
[X6]
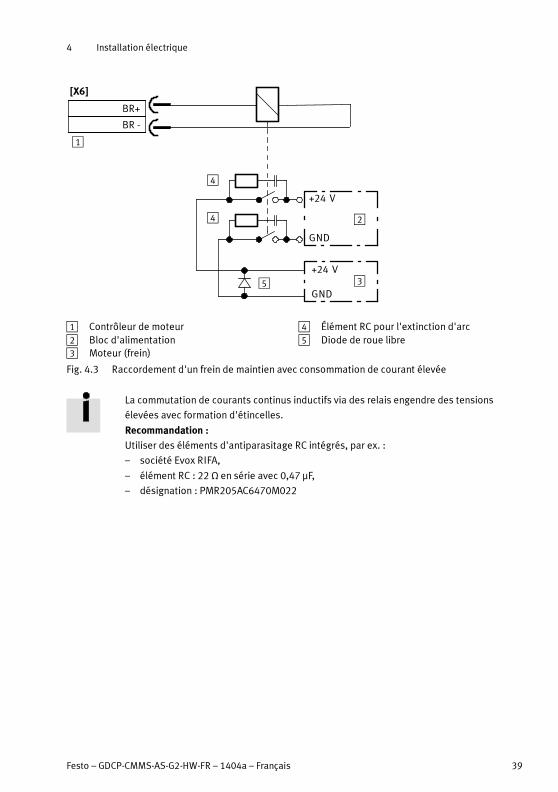
1 Contrôleur de moteur2 Bloc d'alimentation3 Moteur (frein)
4 Élément RC pour l'extinction d'arc5 Diode de roue libre
Fig. 4.3 Raccordement d'un frein de maintien avec consommation de courant élevée
La commutation de courants continus inductifs via des relais engendre des tensions
élevées avec formation d'étincelles.
Recommandation :Utiliser des éléments d'antiparasitage RC intégrés, par ex. :
– société Evox RIFA,
– élément RC : 22 Ω en série avec 0,47 μF,
– désignation : PMR205AC6470M022
4 Installation électrique
40 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
4.9 Alimentation électrique [X9]
4.9.1 Alimentation logique – Très Basse Tension de Protection (TBTP)
AvertissementDanger d'électrocution
• Pour l'alimentation électrique, utiliser uniquement des circuits électriques TBTP
selon EN 60204-1 (Très Basse Tension de Protection, TBTP).
Tenir compte également des exigences générales pour les circuits électriques TBTP
selon la norme EN 60204-1.
• Utiliser exclusivement des sources d'énergie qui garantissent une isolation
électrique fiable de la tension d'alimentation selon EN 60204-1.
L'utilisation des circuits électriques TBTP permet d'assurer l'isolation (protection contre les contacts
directs et indirects) selon EN 60204-1 (Équipement électrique des machines, exigences générales). Le
bloc d'alimentation 24 V utilisé dans le système doit répondre aux exigences de la norme EN 60204-1
relative aux alimentations en courant continu (comportement en cas de coupure de tension, etc.).
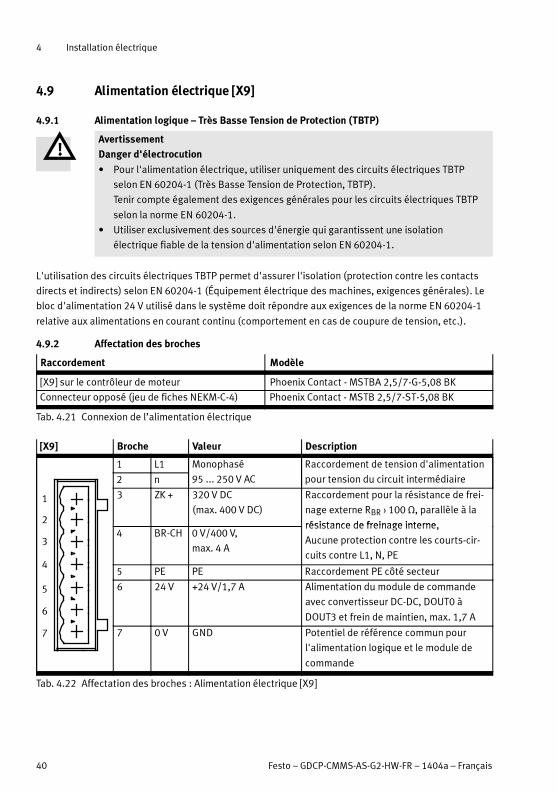
4.9.2 Affectation des broches
Raccordement Modèle
[X9] sur le contrôleur de moteur Phoenix Contact - MSTBA 2,5/7-G-5,08 BK
Connecteur opposé (jeu de fiches NEKM-C-4) Phoenix Contact - MSTB 2,5/7-ST-5,08 BK
Tab. 4.21 Connexion de l’alimentation électrique
[X9] Broche Valeur Description
1
2
3
4
5
6
7
1 L1 Monophasé
95 ... 250 V AC
Raccordement de tension d'alimentation
pour tension du circuit intermédiaire2 n
3 ZK + 320 V DC
(max. 400 V DC)
Raccordement pour la résistance de frei-
nage externe RBR › 100 Ω, parallèle à la
résistance de freinage interne4 BR-CH 0 V/400 V,
max. 4 A
résistance de freinage interne,
Aucune protection contre les courts-cir-
cuits contre L1, N, PE
5 PE PE Raccordement PE côté secteur
6 24 V +24 V/1,7 A Alimentation du module de commande
avec convertisseur DC-DC, DOUT0 à
DOUT3 et frein de maintien, max. 1,7 A
7 0 V GND Potentiel de référence commun pour
l'alimentation logique et le module de
commande
Tab. 4.22 Affectation des broches : Alimentation électrique [X9]
4 Installation électrique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 41
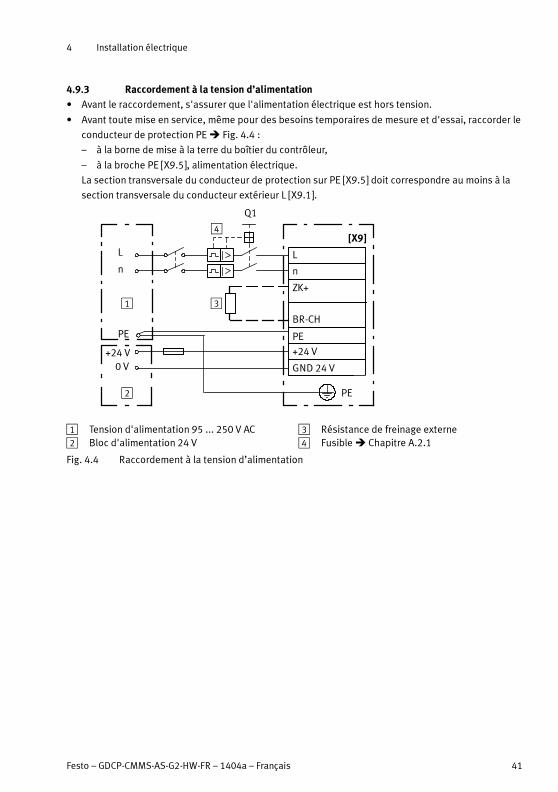
4.9.3 Raccordement à la tension d’alimentation• Avant le raccordement, s'assurer que l'alimentation électrique est hors tension.
• Avant toute mise en service, même pour des besoins temporaires de mesure et d'essai, raccorder le
conducteur de protection PE Fig. 4.4 :
– à la borne de mise à la terre du boîtier du contrôleur,
– à la broche PE [X9.5], alimentation électrique.
La section transversale du conducteur de protection sur PE [X9.5] doit correspondre au moins à la
section transversale du conducteur extérieur L [X9.1].
0 V
PE
BR-CH
ZK+
L
n
+24 V
GND 24 V
L
n
Q1
[X9]
PE
+24 V
1
2
3
4
PE
1 Tension d'alimentation 95 ... 250 V AC2 Bloc d'alimentation 24 V
3 Résistance de freinage externe4 Fusible Chapitre A.2.1
Fig. 4.4 Raccordement à la tension d’alimentation
4 Installation électrique
42 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
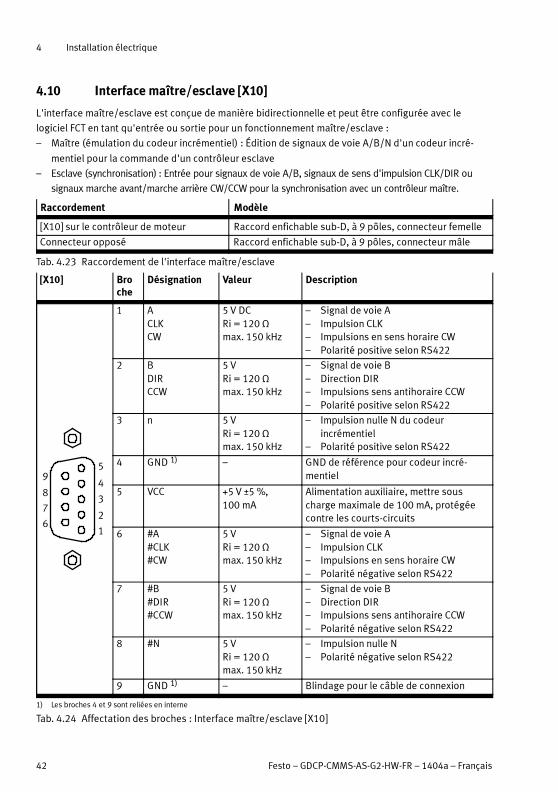
4.10 Interface maître/esclave [X10]
L'interface maître/esclave est conçue de manière bidirectionnelle et peut être configurée avec le
logiciel FCT en tant qu'entrée ou sortie pour un fonctionnement maître/esclave :
– Maître (émulation du codeur incrémentiel) : Édition de signaux de voie A/B/N d'un codeur incré-
mentiel pour la commande d'un contrôleur esclave
– Esclave (synchronisation) : Entrée pour signaux de voie A/B, signaux de sens d'impulsion CLK/DIR ou
signaux marche avant/marche arrière CW/CCW pour la synchronisation avec un contrôleur maître.
Raccordement Modèle
[X10] sur le contrôleur de moteur Raccord enfichable sub-D, à 9 pôles, connecteur femelle
Connecteur opposé Raccord enfichable sub-D, à 9 pôles, connecteur mâle
Tab. 4.23 Raccordement de l'interface maître/esclave
[X10] Broche
Désignation Valeur Description
6
7
8
9
2
1
3
4
5
1 ACLKCW
5 V DCRi = 120 Ωmax. 150 kHz
– Signal de voie A– Impulsion CLK– Impulsions en sens horaire CW– Polarité positive selon RS422
2 BDIRCCW
5 VRi = 120 Ωmax. 150 kHz
– Signal de voie B– Direction DIR– Impulsions sens antihoraire CCW– Polarité positive selon RS422
3 n 5 VRi = 120 Ωmax. 150 kHz
– Impulsion nulle N du codeurincrémentiel
– Polarité positive selon RS422
4 GND 1) – GND de référence pour codeur incré-mentiel
5 VCC +5 V ±5 %,100 mA
Alimentation auxiliaire, mettre souscharge maximale de 100 mA, protégéecontre les courts-circuits
6 #A#CLK#CW
5 VRi = 120 Ωmax. 150 kHz
– Signal de voie A– Impulsion CLK– Impulsions en sens horaire CW– Polarité négative selon RS422
7 #B#DIR#CCW
5 VRi = 120 Ωmax. 150 kHz
– Signal de voie B– Direction DIR– Impulsions sens antihoraire CCW– Polarité négative selon RS422
8 #N 5 VRi = 120 Ωmax. 150 kHz
– Impulsion nulle N– Polarité négative selon RS422
9 GND 1) – Blindage pour le câble de connexion
1) Les broches 4 et 9 sont reliées en interne
Tab. 4.24 Affectation des broches : Interface maître/esclave [X10]
5 Mise en service
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 43
5 Mise en service
NotaDanger dû au mouvement inattendu du moteur ou de l'axe
• Veiller à ce que ce mouvement ne mette personne en danger.
• Paramétrer le contrôleur de moteur avec le Festo Configuration Tool (FCT), avant
d'activer le régulateur via DIN5 [X1.9].
– Le pontage de dispositifs de sécurité n'est pas autorisé.
Recommandation pour la première mise en service sans technique de sécurité :
– câblage minimal avec commande d'arrêt d'urgence sur [X3],
– coupure à deux canaux via les entrées de pilotage REL [X3.2] et DIN4 [X1.21].
NotaDommages au niveau du contrôleur de moteur
Le contrôleur de moteur est endommagé dans les cas suivants :
– tension d'alimentation trop élevée,
– inversion de polarité des connecteurs d'alimentation,
– inversion des connecteurs de tension d'alimentation et des connecteurs du moteur,
– courts-circuits dans le circuit moteur entre les phases du moteur et PE.
• Respecter les valeurs indiquées pour la tension d'alimentation.
• Avant la mise sous tension, vérifier les raccordements [X9] et [X6].
• Vérifier qu'aucun court-circuit PE n'est présent dans le circuit de raccordement du
moteur.
Avant l'activation de l'alimentation électrique :Vérifier l'installation du contrôleur de moteur :
• Vérifier tous les raccordements ( Chapitre 4).
• Raccorder tous les conducteurs de protection PE, même pour des besoins temporaires de mesure
et d'essai.
• Module ou plaque d'obturation monté(e) sur l'emplacement d'enfichage [EXT]. Câble monté sur [X9]
et [X6]
• DeviceNet/RS485 : Contrôler le raccordement de la résistance de terminaison.
Procéder aux réglages suivants :
• S'assurer de l'absence d'une activation du régulateur sur DIN5 [X1.9]. L'interface I/O [X1] est acti-
vée lors de la mise sous tension.
• Micro-interrupteur DIL [S1.8] :
– OFF : Aucun téléchargement de firmware, réglage standard
– ON : Téléchargement de firmware de la carte mémoire SD dans le contrôleur
Pour les autres étapes pour la préparation de la mise en service Description Fonctions
et mise en service GDCP-CMMS/D-FW- ....
6 Maintenance, entretien, réparation et remplacement
44 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
6 Maintenance, entretien, réparation et remplacement
6.1 Maintenance et entretien
AvertissementDanger d'électrocution.
Tout contact avec des pièces conductrices d'électricité peut provoquer des blessures
graves, voire entraîner la mort. Ne pas débrancher les câbles de connexion s'ils sont
sous tension.
Avant de toucher des pièces conductrices d'électricité lors des opérations de mainte-
nance, d'entretien et de nettoyage, ainsi que lors des arrêts prolongés de l'exp-
loitation :
1. Mettre l'équipement électrique hors tension à l'aide de l'interrupteur général, puis
le sécuriser contre toute remise en marche.
2. Après la mise hors tension, attendre l'écoulement du temps de décharge pendant au
moins 5 minutes et vérifier l'absence de tension avant d'intervenir sur le contrôleur.
AttentionRisque de brûlure sur des surfaces brûlantes
Selon la sollicitation du contrôleur de moteur, des températures du boîtier > 80 °C sont
possibles pendant le fonctionnement.
• Toucher ces surfaces uniquement lorsqu'elles ont refroidi et que l'appareil est hors
tension.
Utilisé conformément à l’usage prévu selon la notice d’utilisation, le produit ne nécessite aucun
entretien.
• Nettoyer le produit à l'aide d'un chiffon doux.
6.2 Réparation
Une réparation ou maintenance du produit n’est pas autorisée. Si nécessaire, remplacer
le produit complet.

6 Maintenance, entretien, réparation et remplacement
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 45
6.3 Remplacement et mise au rebut
Respecter les instructions de démontage figurant au paragraphe 3.3.
6.3.1 Démontage et montage
Des informations concernant le démontage et le montage sont disponibles ici :
– Montage Paragraphe 3.2
– Démontage Paragraphe 3.3.
– Mise en service Paragraphe 5.
6.3.2 Mise au rebut
Procéder à la mise au rebut des modules électroniques selon les directives locales de
protection de l'environnement. Le produit conforme à 2002/95/CE (RoHS).
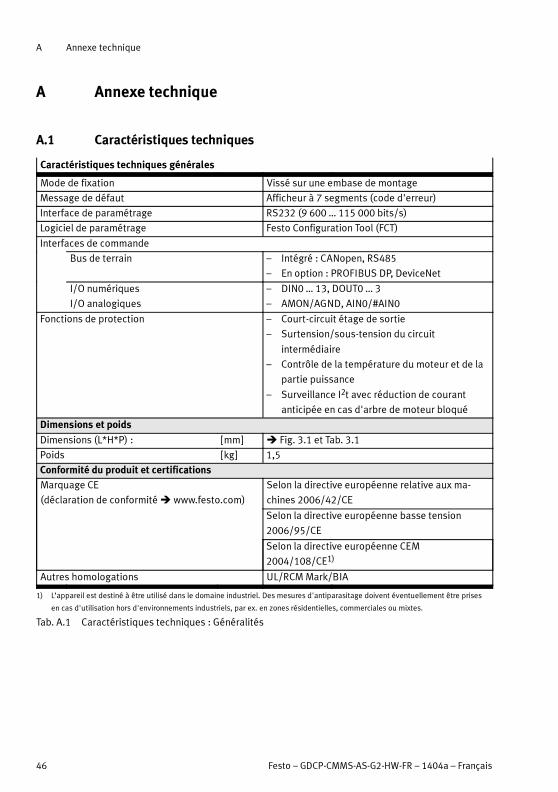
A Annexe technique
46 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
A Annexe technique
A.1 Caractéristiques techniques
Caractéristiques techniques générales
Mode de fixation Vissé sur une embase de montage
Message de défaut Afficheur à 7 segments (code d'erreur)
Interface de paramétrage RS232 (9 600 … 115 000 bits/s)
Logiciel de paramétrage Festo Configuration Tool (FCT)
Interfaces de commande
Bus de terrain – Intégré : CANopen, RS485
– En option : PROFIBUS DP, DeviceNet
I/O numériques
I/O analogiques
– DIN0 … 13, DOUT0 … 3
– AMON/AGND, AIN0/#AIN0
Fonctions de protection – Court-circuit étage de sortie
– Surtension/sous-tension du circuit
intermédiaire
– Contrôle de la température du moteur et de la
partie puissance
– Surveillance I2t avec réduction de courant
anticipée en cas d'arbre de moteur bloqué
Dimensions et poids
Dimensions (L*H*P) : [mm] Fig. 3.1 et Tab. 3.1
Poids [kg] 1,5
Conformité du produit et certificationsMarquage CE
(déclaration de conformitéwww.festo.com)
Selon la directive européenne relative aux ma-
chines 2006/42/CE
Selon la directive européenne basse tension
2006/95/CE
Selon la directive européenne CEM
2004/108/CE1)
Autres homologations UL/RCMMark/BIA
1) L’appareil est destiné à être utilisé dans le domaine industriel. Des mesures d'antiparasitage doivent éventuellement être prises
en cas d'utilisation hors d'environnements industriels, par ex. en zones résidentielles, commerciales ou mixtes.
Tab. A.1 Caractéristiques techniques : Généralités
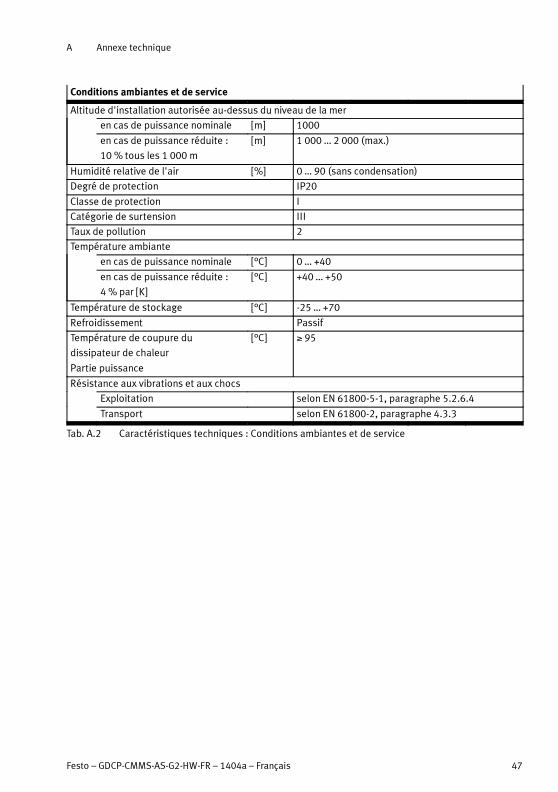
A Annexe technique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 47
Conditions ambiantes et de service
Altitude d'installation autorisée au-dessus du niveau de la mer
en cas de puissance nominale [m] 1000
en cas de puissance réduite :
10 % tous les 1 000 m
[m] 1 000 … 2 000 (max.)
Humidité relative de l'air [%] 0 … 90 (sans condensation)
Degré de protection IP20
Classe de protection I
Catégorie de surtension III
Taux de pollution 2
Température ambiante
en cas de puissance nominale [°C] 0 … +40
en cas de puissance réduite :
4 % par [K]
[°C] +40 … +50
Température de stockage [°C] -25 … +70
Refroidissement Passif
Température de coupure du
dissipateur de chaleur
Partie puissance
[°C] ≥ 95
Résistance aux vibrations et aux chocs
Exploitation selon EN 61800-5-1, paragraphe 5.2.6.4
Transport selon EN 61800-2, paragraphe 4.3.3
Tab. A.2 Caractéristiques techniques : Conditions ambiantes et de service
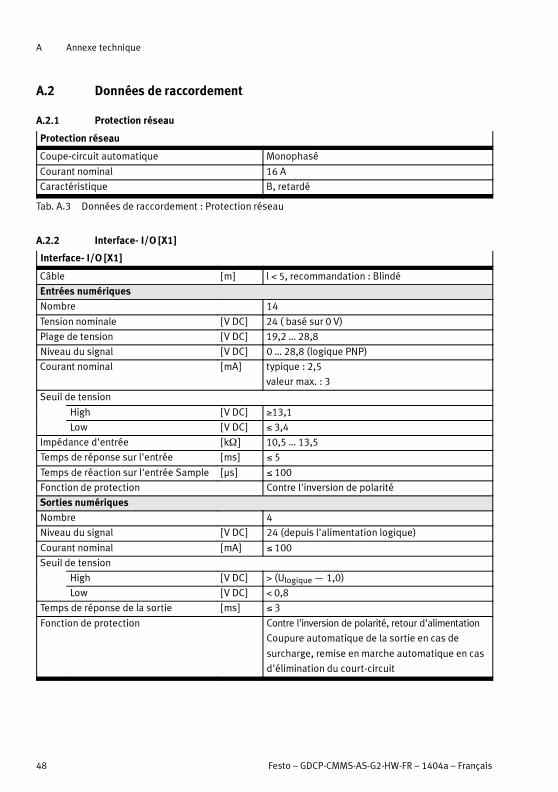
A Annexe technique
48 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
A.2 Données de raccordement
A.2.1 Protection réseau
Protection réseau
Coupe-circuit automatique Monophasé
Courant nominal 16 A
Caractéristique B, retardé
Tab. A.3 Données de raccordement : Protection réseau
A.2.2 Interface- I/O [X1]
Interface- I/O [X1]
Câble [m] l < 5, recommandation : Blindé
Entrées numériquesNombre 14
Tension nominale [V DC] 24 ( basé sur 0 V)
Plage de tension [V DC] 19,2 … 28,8
Niveau du signal [V DC] 0 … 28,8 (logique PNP)
Courant nominal [mA] typique : 2,5
valeur max. : 3
Seuil de tension
High [V DC] ≥13,1
Low [V DC] ≤ 3,4
Impédance d'entrée [kΩ] 10,5 … 13,5
Temps de réponse sur l'entrée [ms] ≤ 5
Temps de réaction sur l'entrée Sample [μs] ≤ 100
Fonction de protection Contre l'inversion de polarité
Sorties numériquesNombre 4
Niveau du signal [V DC] 24 (depuis l'alimentation logique)
Courant nominal [mA] ≤ 100
Seuil de tension
High [V DC] > (Ulogique—1,0)
Low [V DC] < 0,8
Temps de réponse de la sortie [ms] ≤ 3
Fonction de protection Contre l'inversion de polarité, retour d'alimentation
Coupure automatique de la sortie en cas de
surcharge, remise en marche automatique en cas
d'élimination du court-circuit
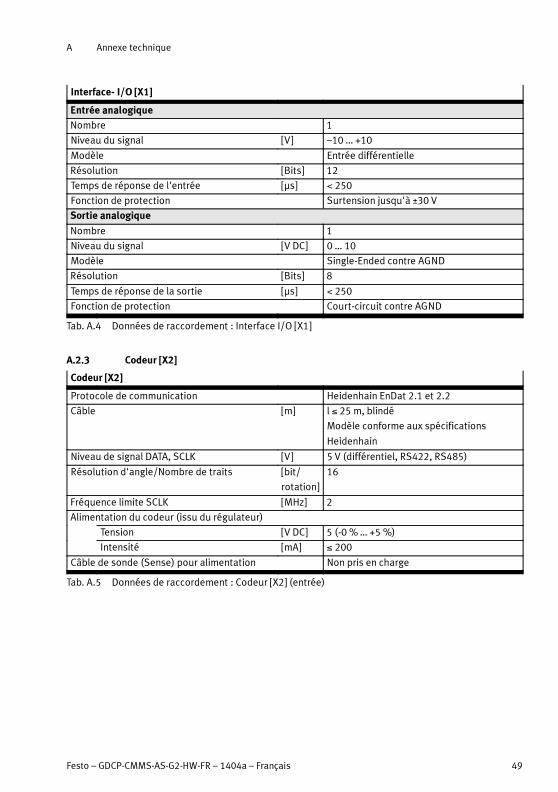
A Annexe technique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 49
Interface- I/O [X1]
Entrée analogiqueNombre 1
Niveau du signal [V] –10 … +10
Modèle Entrée différentielle
Résolution [Bits] 12
Temps de réponse de l'entrée [μs] < 250
Fonction de protection Surtension jusqu'à ±30 V
Sortie analogique
Nombre 1
Niveau du signal [V DC] 0 … 10
Modèle Single-Ended contre AGND
Résolution [Bits] 8
Temps de réponse de la sortie [μs] < 250
Fonction de protection Court-circuit contre AGND
Tab. A.4 Données de raccordement : Interface I/O [X1]
A.2.3 Codeur [X2]
Codeur [X2]
Protocole de communication Heidenhain EnDat 2.1 et 2.2
Câble [m] l ≤ 25 m, blindé
Modèle conforme aux spécifications
Heidenhain
Niveau de signal DATA, SCLK [V] 5 V (différentiel, RS422, RS485)
Résolution d'angle/Nombre de traits [bit/
rotation]
16
Fréquence limite SCLK [MHz] 2
Alimentation du codeur (issu du régulateur)
Tension [V DC] 5 (-0 %… +5 %)
Intensité [mA] ≤ 200
Câble de sonde (Sense) pour alimentation Non pris en charge
Tab. A.5 Données de raccordement : Codeur [X2] (entrée)
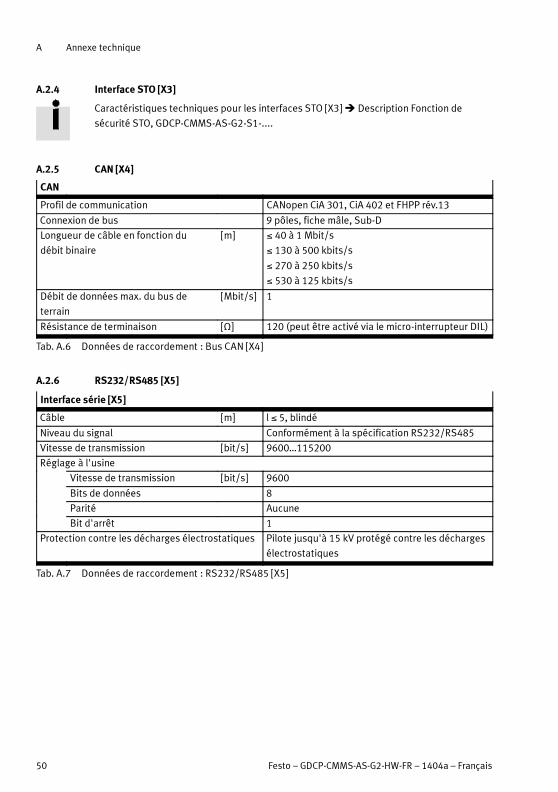
A Annexe technique
50 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
A.2.4 Interface STO [X3]
Caractéristiques techniques pour les interfaces STO [X3] Description Fonction de
sécurité STO, GDCP-CMMS-AS-G2-S1-....
A.2.5 CAN [X4]
CAN
Profil de communication CANopen CiA 301, CiA 402 et FHPP rév.13
Connexion de bus 9 pôles, fiche mâle, Sub-D
Longueur de câble en fonction du
débit binaire
[m] ≤ 40 à 1 Mbit/s
≤ 130 à 500 kbits/s
≤ 270 à 250 kbits/s
≤ 530 à 125 kbits/s
Débit de données max. du bus de
terrain
[Mbit/s] 1
Résistance de terminaison [Ω] 120 (peut être activé via le micro-interrupteur DIL)
Tab. A.6 Données de raccordement : Bus CAN [X4]
A.2.6 RS232/RS485 [X5]
Interface série [X5]
Câble [m] l ≤ 5, blindé
Niveau du signal Conformément à la spécification RS232/RS485
Vitesse de transmission [bit/s] 9600…115200
Réglage à l'usine
Vitesse de transmission [bit/s] 9600
Bits de données 8
Parité Aucune
Bit d'arrêt 1
Protection contre les décharges électrostatiques Pilote jusqu'à 15 kV protégé contre les décharges
électrostatiques
Tab. A.7 Données de raccordement : RS232/RS485 [X5]
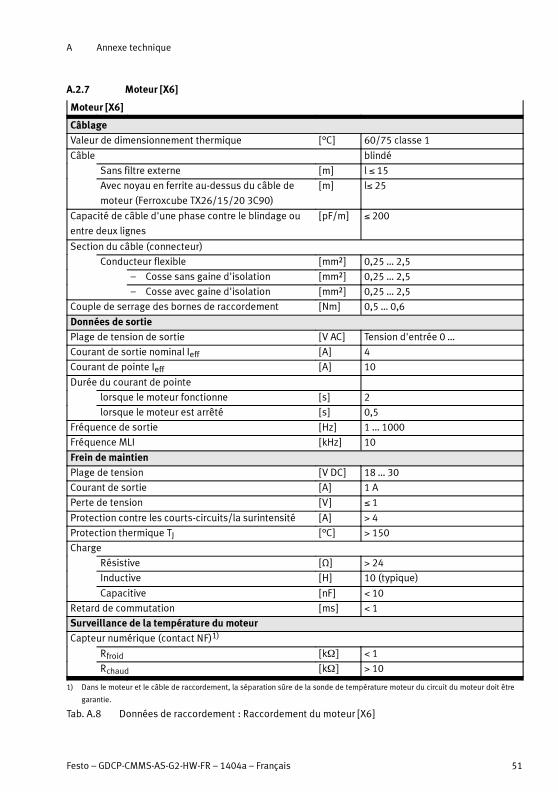
A Annexe technique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 51
A.2.7 Moteur [X6]
Moteur [X6]
CâblageValeur de dimensionnement thermique [°C] 60/75 classe 1
Câble blindé
Sans filtre externe [m] l ≤ 15
Avec noyau en ferrite au-dessus du câble de
moteur (Ferroxcube TX26/15/20 3C90)
[m] l≤ 25
Capacité de câble d'une phase contre le blindage ou
entre deux lignes
[pF/m] ≤ 200
Section du câble (connecteur)
Conducteur flexible [mm²] 0,25 … 2,5
– Cosse sans gaine d'isolation [mm²] 0,25 … 2,5
– Cosse avec gaine d'isolation [mm²] 0,25 … 2,5
Couple de serrage des bornes de raccordement [Nm] 0,5 … 0,6
Données de sortiePlage de tension de sortie [V AC] Tension d'entrée 0 …
Courant de sortie nominal Ieff [A] 4
Courant de pointe Ieff [A] 10
Durée du courant de pointe
lorsque le moteur fonctionne [s] 2
lorsque le moteur est arrêté [s] 0,5
Fréquence de sortie [Hz] 1 … 1000
Fréquence MLI [kHz] 10
Frein de maintienPlage de tension [V DC] 18 … 30
Courant de sortie [A] 1 A
Perte de tension [V] ≤ 1
Protection contre les courts-circuits/la surintensité [A] > 4
Protection thermique TJ [°C] > 150
Charge
Résistive [Ω] > 24
Inductive [H] 10 (typique)
Capacitive [nF] < 10
Retard de commutation [ms] < 1
Surveillance de la température du moteurCapteur numérique (contact NF)1)
Rfroid [kΩ] < 1
Rchaud [kΩ] > 10
1) Dans le moteur et le câble de raccordement, la séparation sûre de la sonde de température moteur du circuit du moteur doit être
garantie.
Tab. A.8 Données de raccordement : Raccordement du moteur [X6]
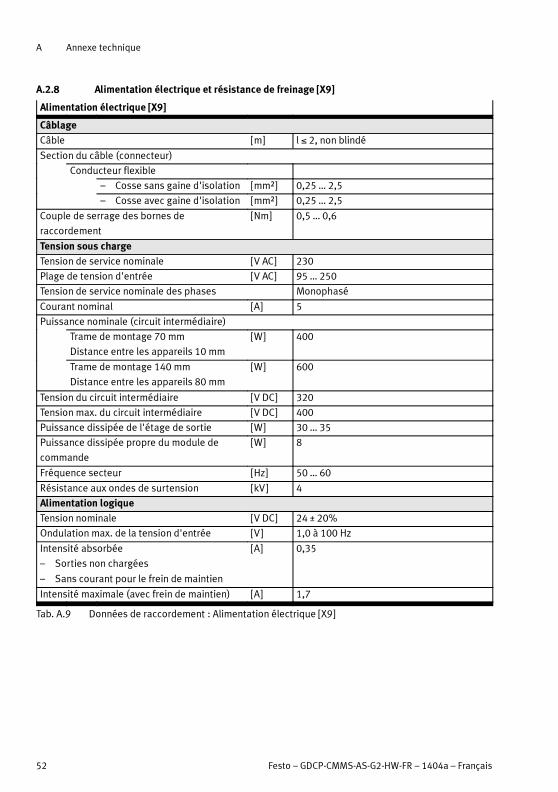
A Annexe technique
52 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
A.2.8 Alimentation électrique et résistance de freinage [X9]
Alimentation électrique [X9]
CâblageCâble [m] l ≤ 2, non blindé
Section du câble (connecteur)
Conducteur flexible
– Cosse sans gaine d'isolation [mm²] 0,25 … 2,5
– Cosse avec gaine d'isolation [mm²] 0,25 … 2,5
Couple de serrage des bornes de
raccordement
[Nm] 0,5 … 0,6
Tension sous chargeTension de service nominale [V AC] 230
Plage de tension d'entrée [V AC] 95 … 250
Tension de service nominale des phases Monophasé
Courant nominal [A] 5
Puissance nominale (circuit intermédiaire)
Trame de montage 70 mm
Distance entre les appareils 10 mm
[W] 400
Trame de montage 140 mm
Distance entre les appareils 80 mm
[W] 600
Tension du circuit intermédiaire [V DC] 320
Tension max. du circuit intermédiaire [V DC] 400
Puissance dissipée de l'étage de sortie [W] 30 … 35
Puissance dissipée propre du module de
commande
[W] 8
Fréquence secteur [Hz] 50 … 60
Résistance aux ondes de surtension [kV] 4
Alimentation logiqueTension nominale [V DC] 24 ± 20%
Ondulation max. de la tension d'entrée [V] 1,0 à 100 Hz
Intensité absorbée
– Sorties non chargées
– Sans courant pour le frein de maintien
[A] 0,35
Intensité maximale (avec frein de maintien) [A] 1,7
Tab. A.9 Données de raccordement : Alimentation électrique [X9]
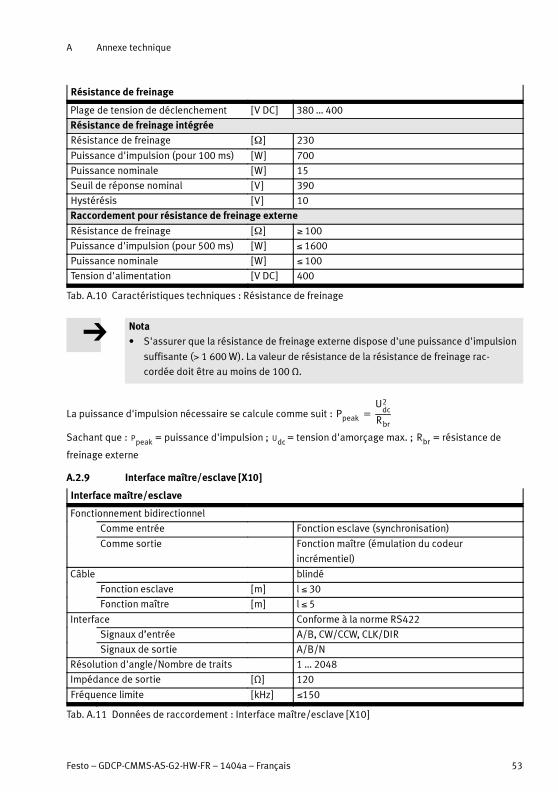
A Annexe technique
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 53
Résistance de freinage
Plage de tension de déclenchement [V DC] 380 … 400
Résistance de freinage intégréeRésistance de freinage [Ω] 230
Puissance d'impulsion (pour 100 ms) [W] 700
Puissance nominale [W] 15
Seuil de réponse nominal [V] 390
Hystérésis [V] 10
Raccordement pour résistance de freinage externe
Résistance de freinage [Ω] ≥ 100
Puissance d'impulsion (pour 500 ms) [W] ≤ 1600
Puissance nominale [W] ≤ 100
Tension d'alimentation [V DC] 400
Tab. A.10 Caractéristiques techniques : Résistance de freinage
Nota• S'assurer que la résistance de freinage externe dispose d'une puissance d'impulsion
suffisante (> 1 600W). La valeur de résistance de la résistance de freinage rac-
cordée doit être au moins de 100 Ω.
La puissance d'impulsion nécessaire se calcule comme suit : Ppeak =U2dc
Rbr
Sachant que : Ppeak = puissance d'impulsion ; Udc= tension d'amorçage max. ; Rbr = résistance de
freinage externe
A.2.9 Interface maître/esclave [X10]
Interface maître/esclave
Fonctionnement bidirectionnel
Comme entrée Fonction esclave (synchronisation)
Comme sortie Fonction maître (émulation du codeur
incrémentiel)
Câble blindé
Fonction esclave [m] l ≤ 30
Fonction maître [m] l ≤ 5
Interface Conforme à la norme RS422
Signaux d’entrée A/B, CW/CCW, CLK/DIR
Signaux de sortie A/B/N
Résolution d'angle/Nombre de traits 1 … 2048
Impédance de sortie [Ω] 120
Fréquence limite [kHz] ≤150
Tab. A.11 Données de raccordement : Interface maître/esclave [X10]
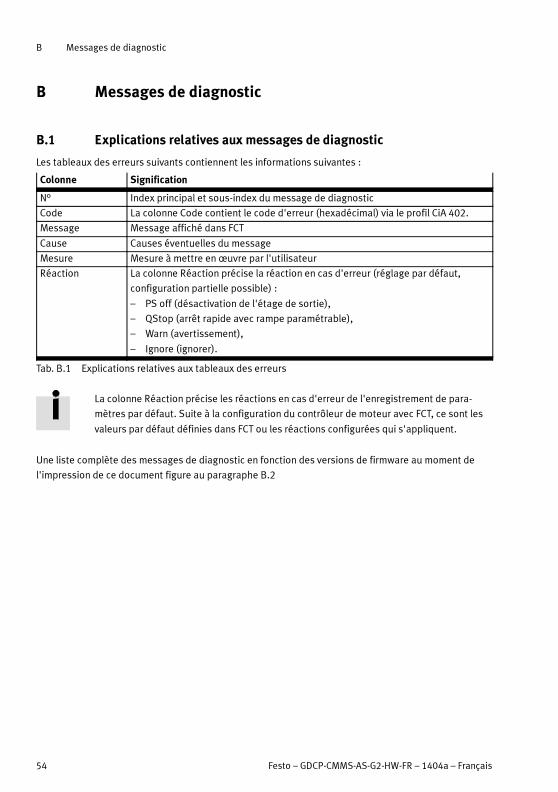
B Messages de diagnostic
54 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
B Messages de diagnostic
B.1 Explications relatives aux messages de diagnostic
Les tableaux des erreurs suivants contiennent les informations suivantes :
Colonne Signification
N° Index principal et sous-index du message de diagnostic
Code La colonne Code contient le code d'erreur (hexadécimal) via le profil CiA 402.
Message Message affiché dans FCT
Cause Causes éventuelles du message
Mesure Mesure à mettre enœuvre par l'utilisateur
Réaction La colonne Réaction précise la réaction en cas d'erreur (réglage par défaut,
configuration partielle possible) :
– PS off (désactivation de l'étage de sortie),
– QStop (arrêt rapide avec rampe paramétrable),
– Warn (avertissement),
– Ignore (ignorer).
Tab. B.1 Explications relatives aux tableaux des erreurs
La colonne Réaction précise les réactions en cas d'erreur de l'enregistrement de para-
mètres par défaut. Suite à la configuration du contrôleur de moteur avec FCT, ce sont les
valeurs par défaut définies dans FCT ou les réactions configurées qui s'appliquent.
Une liste complète des messages de diagnostic en fonction des versions de firmware au moment de
l'impression de ce document figure au paragraphe B.2
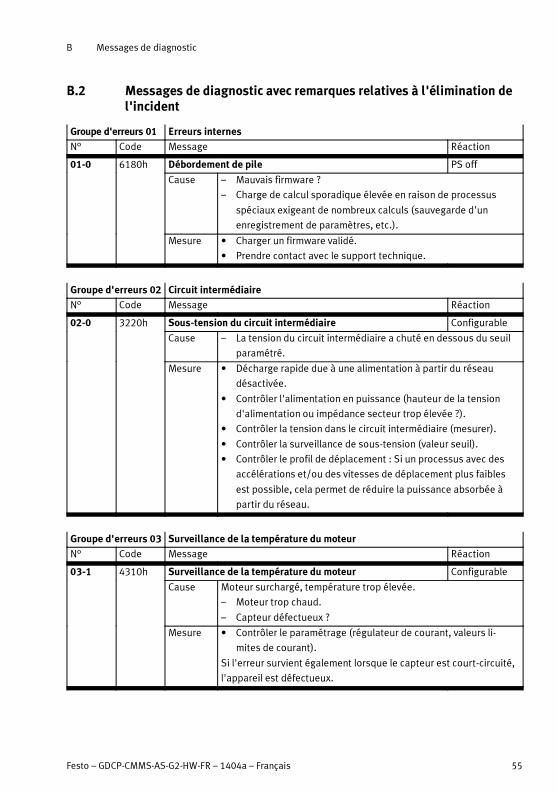
B Messages de diagnostic
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 55
B.2 Messages de diagnostic avec remarques relatives à l'élimination del'incident
Groupe d'erreurs 01 Erreurs internesN° Code Message Réaction
01-0 6180h Débordement de pile PS off
Cause – Mauvais firmware ?
– Charge de calcul sporadique élevée en raison de processus
spéciaux exigeant de nombreux calculs (sauvegarde d'un
enregistrement de paramètres, etc.).
Mesure • Charger un firmware validé.
• Prendre contact avec le support technique.
Groupe d'erreurs 02 Circuit intermédiaireN° Code Message Réaction
02-0 3220h Sous-tension du circuit intermédiaire Configurable
Cause – La tension du circuit intermédiaire a chuté en dessous du seuil
paramétré.
Mesure • Décharge rapide due à une alimentation à partir du réseau
désactivée.
• Contrôler l'alimentation en puissance (hauteur de la tension
d'alimentation ou impédance secteur trop élevée ?).
• Contrôler la tension dans le circuit intermédiaire (mesurer).
• Contrôler la surveillance de sous-tension (valeur seuil).
• Contrôler le profil de déplacement : Si un processus avec des
accélérations et/ou des vitesses de déplacement plus faibles
est possible, cela permet de réduire la puissance absorbée à
partir du réseau.
Groupe d'erreurs 03 Surveillance de la température du moteurN° Code Message Réaction
03-1 4310h Surveillance de la température du moteur Configurable
Cause Moteur surchargé, température trop élevée.
– Moteur trop chaud.
– Capteur défectueux ?
Mesure • Contrôler le paramétrage (régulateur de courant, valeurs li-
mites de courant).
Si l'erreur survient également lorsque le capteur est court-circuité,
l'appareil est défectueux.
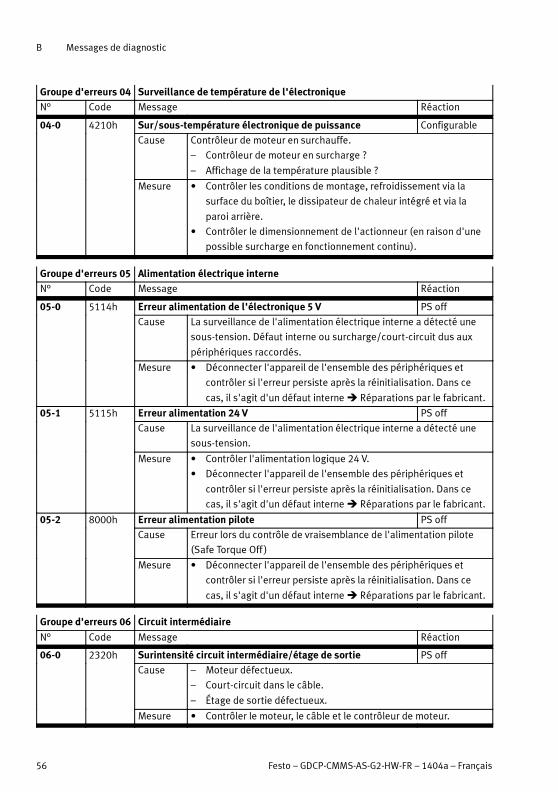
B Messages de diagnostic
56 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
Groupe d'erreurs 04 Surveillance de température de l'électroniqueN° Code Message Réaction
04-0 4210h Sur/sous-température électronique de puissance Configurable
Cause Contrôleur de moteur en surchauffe.
– Contrôleur de moteur en surcharge ?
– Affichage de la température plausible ?
Mesure • Contrôler les conditions de montage, refroidissement via la
surface du boîtier, le dissipateur de chaleur intégré et via la
paroi arrière.
• Contrôler le dimensionnement de l'actionneur (en raison d'une
possible surcharge en fonctionnement continu).
Groupe d'erreurs 05 Alimentation électrique interneN° Code Message Réaction
05-0 5114h Erreur alimentation de l'électronique 5 V PS off
Cause La surveillance de l'alimentation électrique interne a détecté une
sous-tension. Défaut interne ou surcharge/court-circuit dus aux
périphériques raccordés.
Mesure • Déconnecter l'appareil de l'ensemble des périphériques et
contrôler si l'erreur persiste après la réinitialisation. Dans ce
cas, il s'agit d'un défaut interne Réparations par le fabricant.
05-1 5115h Erreur alimentation 24 V PS off
Cause La surveillance de l'alimentation électrique interne a détecté une
sous-tension.
Mesure • Contrôler l'alimentation logique 24 V.
• Déconnecter l'appareil de l'ensemble des périphériques et
contrôler si l'erreur persiste après la réinitialisation. Dans ce
cas, il s'agit d'un défaut interne Réparations par le fabricant.
05-2 8000h Erreur alimentation pilote PS off
Cause Erreur lors du contrôle de vraisemblance de l'alimentation pilote
(Safe Torque Off )
Mesure • Déconnecter l'appareil de l'ensemble des périphériques et
contrôler si l'erreur persiste après la réinitialisation. Dans ce
cas, il s'agit d'un défaut interne Réparations par le fabricant.
Groupe d'erreurs 06 Circuit intermédiaire
N° Code Message Réaction
06-0 2320h Surintensité circuit intermédiaire/étage de sortie PS off
Cause – Moteur défectueux.
– Court-circuit dans le câble.
– Étage de sortie défectueux.
Mesure • Contrôler le moteur, le câble et le contrôleur de moteur.
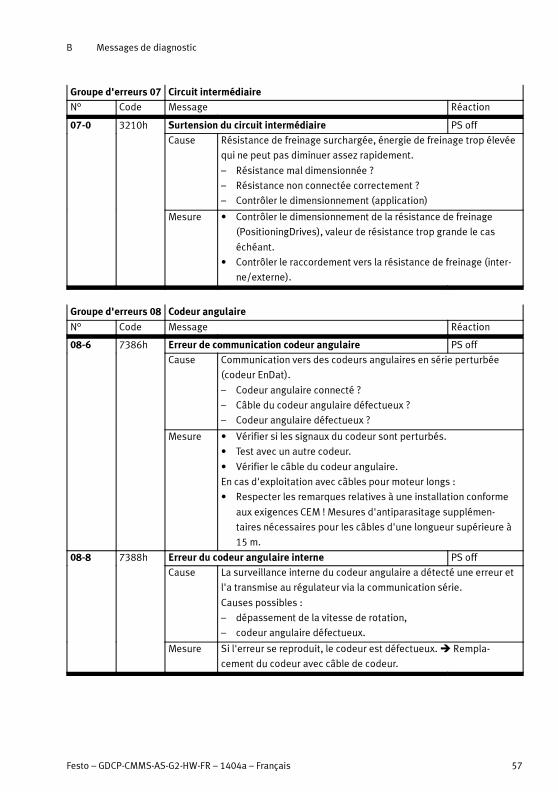
B Messages de diagnostic
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 57
Groupe d'erreurs 07 Circuit intermédiaireN° Code Message Réaction
07-0 3210h Surtension du circuit intermédiaire PS off
Cause Résistance de freinage surchargée, énergie de freinage trop élevée
qui ne peut pas diminuer assez rapidement.
– Résistance mal dimensionnée ?
– Résistance non connectée correctement ?
– Contrôler le dimensionnement (application)
Mesure • Contrôler le dimensionnement de la résistance de freinage
(PositioningDrives), valeur de résistance trop grande le cas
échéant.
• Contrôler le raccordement vers la résistance de freinage (inter-
ne/externe).
Groupe d'erreurs 08 Codeur angulaire
N° Code Message Réaction
08-6 7386h Erreur de communication codeur angulaire PS off
Cause Communication vers des codeurs angulaires en série perturbée
(codeur EnDat).
– Codeur angulaire connecté ?
– Câble du codeur angulaire défectueux ?
– Codeur angulaire défectueux ?
Mesure • Vérifier si les signaux du codeur sont perturbés.
• Test avec un autre codeur.
• Vérifier le câble du codeur angulaire.
En cas d'exploitation avec câbles pour moteur longs :
• Respecter les remarques relatives à une installation conforme
aux exigences CEM ! Mesures d'antiparasitage supplémen-
taires nécessaires pour les câbles d'une longueur supérieure à
15 m.
08-8 7388h Erreur du codeur angulaire interne PS off
Cause La surveillance interne du codeur angulaire a détecté une erreur et
l'a transmise au régulateur via la communication série.
Causes possibles :
– dépassement de la vitesse de rotation,
– codeur angulaire défectueux.
Mesure Si l'erreur se reproduit, le codeur est défectueux. Rempla-
cement du codeur avec câble de codeur.
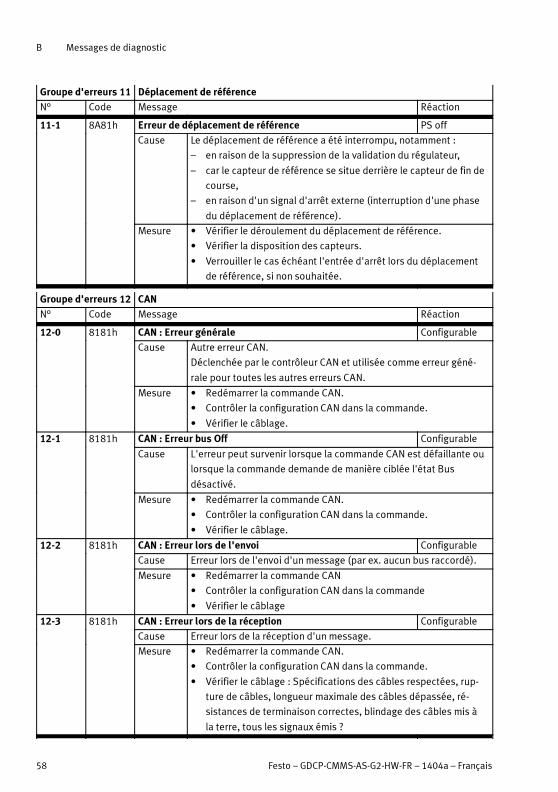
B Messages de diagnostic
58 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
Groupe d'erreurs 11 Déplacement de référenceN° Code Message Réaction
11-1 8A81h Erreur de déplacement de référence PS off
Cause Le déplacement de référence a été interrompu, notamment :
– en raison de la suppression de la validation du régulateur,
– car le capteur de référence se situe derrière le capteur de fin de
course,
– en raison d'un signal d'arrêt externe (interruption d'une phase
du déplacement de référence).
Mesure • Vérifier le déroulement du déplacement de référence.
• Vérifier la disposition des capteurs.
• Verrouiller le cas échéant l'entrée d'arrêt lors du déplacement
de référence, si non souhaitée.
Groupe d'erreurs 12 CANN° Code Message Réaction
12-0 8181h CAN : Erreur générale Configurable
Cause Autre erreur CAN.
Déclenchée par le contrôleur CAN et utilisée comme erreur géné-
rale pour toutes les autres erreurs CAN.
Mesure • Redémarrer la commande CAN.
• Contrôler la configuration CAN dans la commande.
• Vérifier le câblage.
12-1 8181h CAN : Erreur bus Off Configurable
Cause L'erreur peut survenir lorsque la commande CAN est défaillante ou
lorsque la commande demande de manière ciblée l'état Bus
désactivé.
Mesure • Redémarrer la commande CAN.
• Contrôler la configuration CAN dans la commande.
• Vérifier le câblage.
12-2 8181h CAN : Erreur lors de l'envoi Configurable
Cause Erreur lors de l'envoi d'unmessage (par ex. aucun bus raccordé).
Mesure • Redémarrer la commande CAN
• Contrôler la configuration CAN dans la commande
• Vérifier le câblage
12-3 8181h CAN : Erreur lors de la réception Configurable
Cause Erreur lors de la réception d'un message.
Mesure • Redémarrer la commande CAN.
• Contrôler la configuration CAN dans la commande.
• Vérifier le câblage : Spécifications des câbles respectées, rup-
ture de câbles, longueur maximale des câbles dépassée, ré-
sistances de terminaison correctes, blindage des câbles mis à
la terre, tous les signaux émis ?
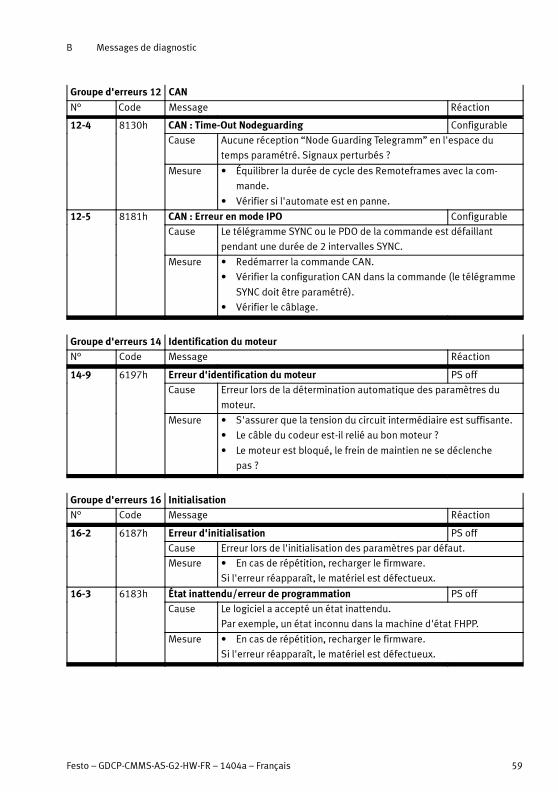
B Messages de diagnostic
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 59
Groupe d'erreurs 12 CAN
N° RéactionMessageCode
12-4 8130h CAN : Time-Out Nodeguarding Configurable
Cause Aucune réception “Node Guarding Telegramm” en l'espace du
temps paramétré. Signaux perturbés ?
Mesure • Équilibrer la durée de cycle des Remoteframes avec la com-
mande.
• Vérifier si l'automate est en panne.
12-5 8181h CAN : Erreur en mode IPO Configurable
Cause Le télégramme SYNC ou le PDO de la commande est défaillant
pendant une durée de 2 intervalles SYNC.
Mesure • Redémarrer la commande CAN.
• Vérifier la configuration CAN dans la commande (le télégramme
SYNC doit être paramétré).
• Vérifier le câblage.
Groupe d'erreurs 14 Identification du moteurN° Code Message Réaction
14-9 6197h Erreur d'identification du moteur PS off
Cause Erreur lors de la détermination automatique des paramètres du
moteur.
Mesure • S'assurer que la tension du circuit intermédiaire est suffisante.
• Le câble du codeur est-il relié au bonmoteur ?
• Le moteur est bloqué, le frein de maintien ne se déclenche
pas ?
Groupe d'erreurs 16 InitialisationN° Code Message Réaction
16-2 6187h Erreur d'initialisation PS off
Cause Erreur lors de l'initialisation des paramètres par défaut.
Mesure • En cas de répétition, recharger le firmware.
Si l'erreur réapparaît, le matériel est défectueux.
16-3 6183h État inattendu/erreur de programmation PS off
Cause Le logiciel a accepté un état inattendu.
Par exemple, un état inconnu dans la machine d'état FHPP.
Mesure • En cas de répétition, recharger le firmware.
Si l'erreur réapparaît, le matériel est défectueux.
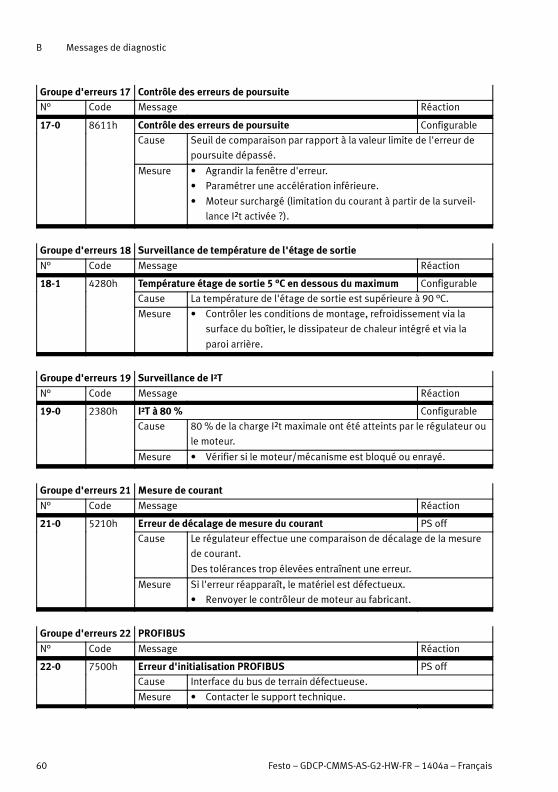
B Messages de diagnostic
60 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
Groupe d'erreurs 17 Contrôle des erreurs de poursuiteN° Code Message Réaction
17-0 8611h Contrôle des erreurs de poursuite Configurable
Cause Seuil de comparaison par rapport à la valeur limite de l'erreur de
poursuite dépassé.
Mesure • Agrandir la fenêtre d'erreur.
• Paramétrer une accélération inférieure.
• Moteur surchargé (limitation du courant à partir de la surveil-
lance I²t activée ?).
Groupe d'erreurs 18 Surveillance de température de l'étage de sortie
N° Code Message Réaction
18-1 4280h Température étage de sortie 5 °C en dessous du maximum Configurable
Cause La température de l'étage de sortie est supérieure à 90 °C.
Mesure • Contrôler les conditions de montage, refroidissement via la
surface du boîtier, le dissipateur de chaleur intégré et via la
paroi arrière.
Groupe d'erreurs 19 Surveillance de I²T
N° Code Message Réaction
19-0 2380h I²T à 80 % Configurable
Cause 80 % de la charge I²t maximale ont été atteints par le régulateur ou
le moteur.
Mesure • Vérifier si le moteur/mécanisme est bloqué ou enrayé.
Groupe d'erreurs 21 Mesure de courant
N° Code Message Réaction
21-0 5210h Erreur de décalage de mesure du courant PS off
Cause Le régulateur effectue une comparaison de décalage de la mesure
de courant.
Des tolérances trop élevées entraînent une erreur.
Mesure Si l'erreur réapparaît, le matériel est défectueux.
• Renvoyer le contrôleur de moteur au fabricant.
Groupe d'erreurs 22 PROFIBUS
N° Code Message Réaction
22-0 7500h Erreur d'initialisation PROFIBUS PS off
Cause Interface du bus de terrain défectueuse.
Mesure • Contacter le support technique.
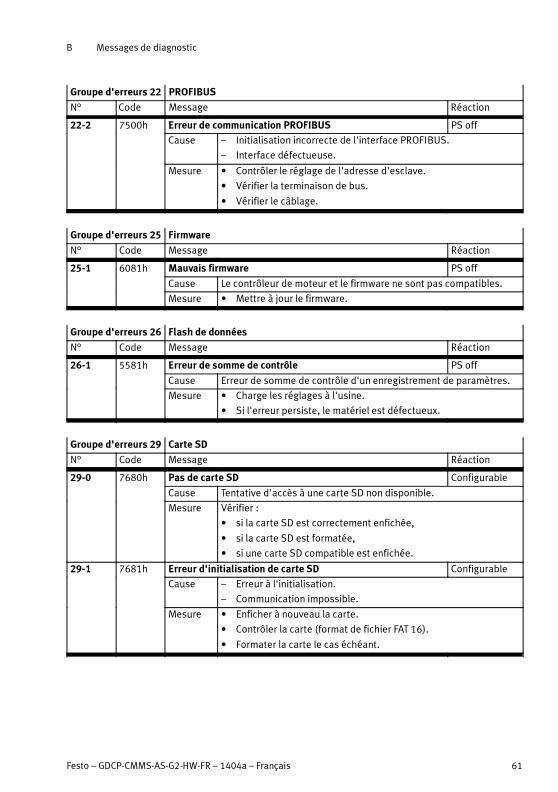
B Messages de diagnostic
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 61
Groupe d'erreurs 22 PROFIBUS
N° RéactionMessageCode
22-2 7500h Erreur de communication PROFIBUS PS off
Cause – Initialisation incorrecte de l'interface PROFIBUS.
– Interface défectueuse.
Mesure • Contrôler le réglage de l'adresse d'esclave.
• Vérifier la terminaison de bus.
• Vérifier le câblage.
Groupe d'erreurs 25 Firmware
N° Code Message Réaction
25-1 6081h Mauvais firmware PS off
Cause Le contrôleur de moteur et le firmware ne sont pas compatibles.
Mesure • Mettre à jour le firmware.
Groupe d'erreurs 26 Flash de données
N° Code Message Réaction
26-1 5581h Erreur de somme de contrôle PS off
Cause Erreur de somme de contrôle d'un enregistrement de paramètres.
Mesure • Charge les réglages à l'usine.
• Si l'erreur persiste, le matériel est défectueux.
Groupe d'erreurs 29 Carte SD
N° Code Message Réaction
29-0 7680h Pas de carte SD Configurable
Cause Tentative d'accès à une carte SD non disponible.
Mesure Vérifier :
• si la carte SD est correctement enfichée,
• si la carte SD est formatée,
• si une carte SD compatible est enfichée.
29-1 7681h Erreur d'initialisation de carte SD Configurable
Cause – Erreur à l'initialisation.
– Communication impossible.
Mesure • Enficher à nouveau la carte.
• Contrôler la carte (format de fichier FAT 16).
• Formater la carte le cas échéant.
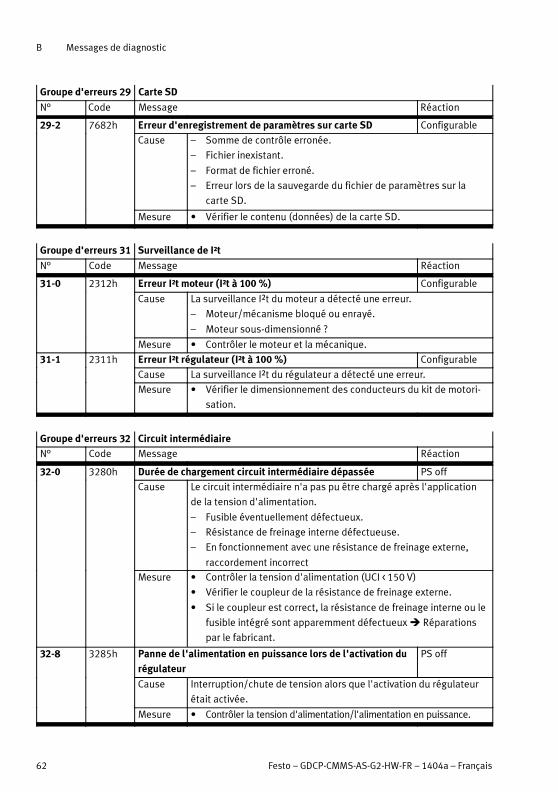
B Messages de diagnostic
62 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
Groupe d'erreurs 29 Carte SD
N° RéactionMessageCode
29-2 7682h Erreur d'enregistrement de paramètres sur carte SD Configurable
Cause – Somme de contrôle erronée.
– Fichier inexistant.
– Format de fichier erroné.
– Erreur lors de la sauvegarde du fichier de paramètres sur la
carte SD.
Mesure • Vérifier le contenu (données) de la carte SD.
Groupe d'erreurs 31 Surveillance de I²t
N° Code Message Réaction
31-0 2312h Erreur I²t moteur (I²t à 100 %) Configurable
Cause La surveillance I²t du moteur a détecté une erreur.
– Moteur/mécanisme bloqué ou enrayé.
– Moteur sous-dimensionné ?
Mesure • Contrôler le moteur et la mécanique.
31-1 2311h Erreur I²t régulateur (I²t à 100 %) Configurable
Cause La surveillance I²t du régulateur a détecté une erreur.
Mesure • Vérifier le dimensionnement des conducteurs du kit de motori-
sation.
Groupe d'erreurs 32 Circuit intermédiaireN° Code Message Réaction
32-0 3280h Durée de chargement circuit intermédiaire dépassée PS off
Cause Le circuit intermédiaire n'a pas pu être chargé après l'application
de la tension d'alimentation.
– Fusible éventuellement défectueux.
– Résistance de freinage interne défectueuse.
– En fonctionnement avec une résistance de freinage externe,
raccordement incorrect
Mesure • Contrôler la tension d'alimentation (UCI < 150 V)
• Vérifier le coupleur de la résistance de freinage externe.
• Si le coupleur est correct, la résistance de freinage interne ou le
fusible intégré sont apparemment défectueux Réparations
par le fabricant.
32-8 3285h Panne de l'alimentation en puissance lors de l'activation durégulateur
PS off
Cause Interruption/chute de tension alors que l'activation du régulateur
était activée.
Mesure • Contrôler la tension d'alimentation/l'alimentation en puissance.
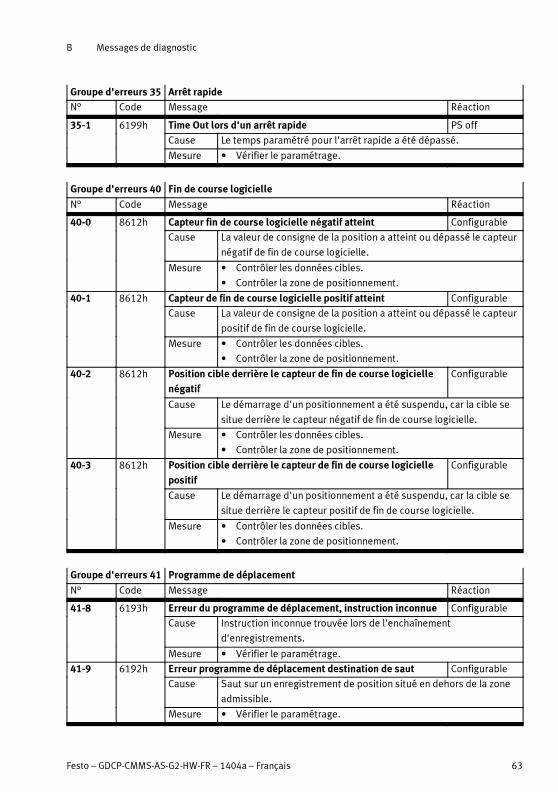
B Messages de diagnostic
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 63
Groupe d'erreurs 35 Arrêt rapideN° Code Message Réaction
35-1 6199h Time Out lors d'un arrêt rapide PS off
Cause Le temps paramétré pour l'arrêt rapide a été dépassé.
Mesure • Vérifier le paramétrage.
Groupe d'erreurs 40 Fin de course logicielle
N° Code Message Réaction
40-0 8612h Capteur fin de course logicielle négatif atteint Configurable
Cause La valeur de consigne de la position a atteint ou dépassé le capteur
négatif de fin de course logicielle.
Mesure • Contrôler les données cibles.
• Contrôler la zone de positionnement.
40-1 8612h Capteur de fin de course logicielle positif atteint Configurable
Cause La valeur de consigne de la position a atteint ou dépassé le capteur
positif de fin de course logicielle.
Mesure • Contrôler les données cibles.
• Contrôler la zone de positionnement.
40-2 8612h Position cible derrière le capteur de fin de course logiciellenégatif
Configurable
Cause Le démarrage d'un positionnement a été suspendu, car la cible se
situe derrière le capteur négatif de fin de course logicielle.
Mesure • Contrôler les données cibles.
• Contrôler la zone de positionnement.
40-3 8612h Position cible derrière le capteur de fin de course logiciellepositif
Configurable
Cause Le démarrage d'un positionnement a été suspendu, car la cible se
situe derrière le capteur positif de fin de course logicielle.
Mesure • Contrôler les données cibles.
• Contrôler la zone de positionnement.
Groupe d'erreurs 41 Programme de déplacement
N° Code Message Réaction
41-8 6193h Erreur du programme de déplacement, instruction inconnue Configurable
Cause Instruction inconnue trouvée lors de l'enchaînement
d'enregistrements.
Mesure • Vérifier le paramétrage.
41-9 6192h Erreur programme de déplacement destination de saut Configurable
Cause Saut sur un enregistrement de position situé en dehors de la zone
admissible.
Mesure • Vérifier le paramétrage.
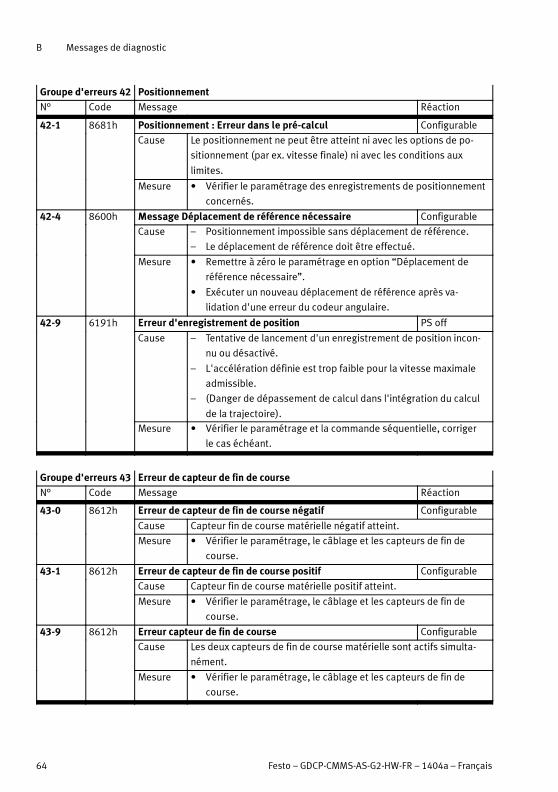
B Messages de diagnostic
64 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
Groupe d'erreurs 42 PositionnementN° Code Message Réaction
42-1 8681h Positionnement : Erreur dans le pré-calcul Configurable
Cause Le positionnement ne peut être atteint ni avec les options de po-
sitionnement (par ex. vitesse finale) ni avec les conditions aux
limites.
Mesure • Vérifier le paramétrage des enregistrements de positionnement
concernés.
42-4 8600h Message Déplacement de référence nécessaire Configurable
Cause – Positionnement impossible sans déplacement de référence.
– Le déplacement de référence doit être effectué.
Mesure • Remettre à zéro le paramétrage en option “Déplacement de
référence nécessaire”.
• Exécuter un nouveau déplacement de référence après va-
lidation d'une erreur du codeur angulaire.
42-9 6191h Erreur d'enregistrement de position PS off
Cause – Tentative de lancement d'un enregistrement de position incon-
nu ou désactivé.
– L'accélération définie est trop faible pour la vitesse maximale
admissible.
– (Danger de dépassement de calcul dans l'intégration du calcul
de la trajectoire).
Mesure • Vérifier le paramétrage et la commande séquentielle, corriger
le cas échéant.
Groupe d'erreurs 43 Erreur de capteur de fin de courseN° Code Message Réaction
43-0 8612h Erreur de capteur de fin de course négatif Configurable
Cause Capteur fin de course matérielle négatif atteint.
Mesure • Vérifier le paramétrage, le câblage et les capteurs de fin de
course.
43-1 8612h Erreur de capteur de fin de course positif Configurable
Cause Capteur fin de course matérielle positif atteint.
Mesure • Vérifier le paramétrage, le câblage et les capteurs de fin de
course.
43-9 8612h Erreur capteur de fin de course Configurable
Cause Les deux capteurs de fin de course matérielle sont actifs simulta-
nément.
Mesure • Vérifier le paramétrage, le câblage et les capteurs de fin de
course.
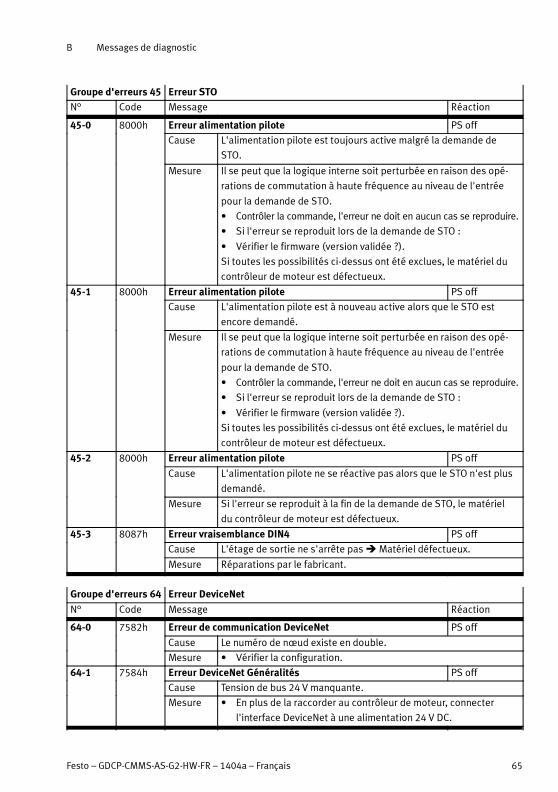
B Messages de diagnostic
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 65
Groupe d'erreurs 45 Erreur STON° Code Message Réaction
45-0 8000h Erreur alimentation pilote PS off
Cause L'alimentation pilote est toujours active malgré la demande de
STO.
Mesure Il se peut que la logique interne soit perturbée en raison des opé-
rations de commutation à haute fréquence au niveau de l'entrée
pour la demande de STO.
• Contrôler la commande, l'erreur ne doit en aucun cas se reproduire.
• Si l'erreur se reproduit lors de la demande de STO :
• Vérifier le firmware (version validée ?).
Si toutes les possibilités ci-dessus ont été exclues, le matériel du
contrôleur de moteur est défectueux.
45-1 8000h Erreur alimentation pilote PS off
Cause L'alimentation pilote est à nouveau active alors que le STO est
encore demandé.
Mesure Il se peut que la logique interne soit perturbée en raison des opé-
rations de commutation à haute fréquence au niveau de l'entrée
pour la demande de STO.
• Contrôler la commande, l'erreur ne doit en aucun cas se reproduire.
• Si l'erreur se reproduit lors de la demande de STO :
• Vérifier le firmware (version validée ?).
Si toutes les possibilités ci-dessus ont été exclues, le matériel du
contrôleur de moteur est défectueux.
45-2 8000h Erreur alimentation pilote PS off
Cause L'alimentation pilote ne se réactive pas alors que le STO n'est plus
demandé.
Mesure Si l'erreur se reproduit à la fin de la demande de STO, le matériel
du contrôleur de moteur est défectueux.
45-3 8087h Erreur vraisemblance DIN4 PS off
Cause L'étage de sortie ne s'arrête pasMatériel défectueux.
Mesure Réparations par le fabricant.
Groupe d'erreurs 64 Erreur DeviceNet
N° Code Message Réaction
64-0 7582h Erreur de communication DeviceNet PS off
Cause Le numéro de nœud existe en double.
Mesure • Vérifier la configuration.
64-1 7584h Erreur DeviceNet Généralités PS off
Cause Tension de bus 24 V manquante.
Mesure • En plus de la raccorder au contrôleur de moteur, connecter
l'interface DeviceNet à une alimentation 24 V DC.
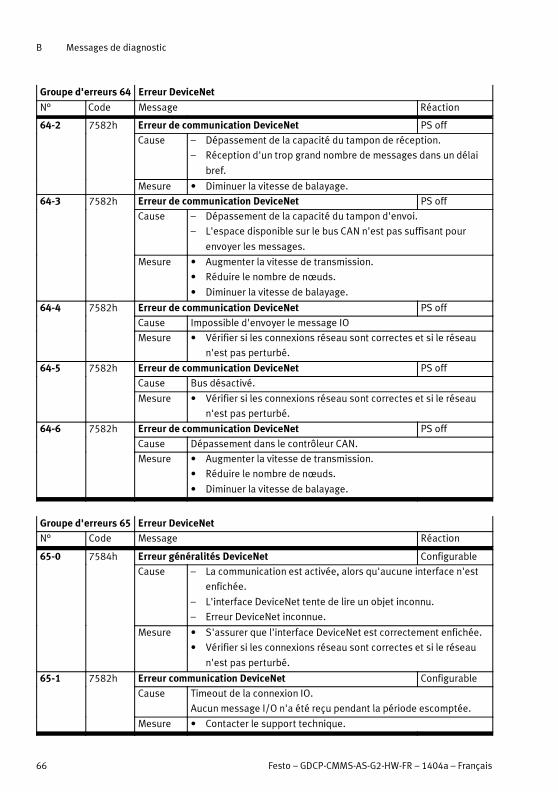
B Messages de diagnostic
66 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
Groupe d'erreurs 64 Erreur DeviceNet
N° RéactionMessageCode
64-2 7582h Erreur de communication DeviceNet PS off
Cause – Dépassement de la capacité du tampon de réception.
– Réception d'un trop grand nombre de messages dans un délai
bref.
Mesure • Diminuer la vitesse de balayage.
64-3 7582h Erreur de communication DeviceNet PS off
Cause – Dépassement de la capacité du tampon d'envoi.
– L'espace disponible sur le bus CAN n'est pas suffisant pour
envoyer les messages.
Mesure • Augmenter la vitesse de transmission.
• Réduire le nombre de nœuds.
• Diminuer la vitesse de balayage.
64-4 7582h Erreur de communication DeviceNet PS off
Cause Impossible d'envoyer le message IO
Mesure • Vérifier si les connexions réseau sont correctes et si le réseau
n'est pas perturbé.
64-5 7582h Erreur de communication DeviceNet PS off
Cause Bus désactivé.
Mesure • Vérifier si les connexions réseau sont correctes et si le réseau
n'est pas perturbé.
64-6 7582h Erreur de communication DeviceNet PS off
Cause Dépassement dans le contrôleur CAN.
Mesure • Augmenter la vitesse de transmission.
• Réduire le nombre de nœuds.
• Diminuer la vitesse de balayage.
Groupe d'erreurs 65 Erreur DeviceNetN° Code Message Réaction
65-0 7584h Erreur généralités DeviceNet Configurable
Cause – La communication est activée, alors qu'aucune interface n'est
enfichée.
– L'interface DeviceNet tente de lire un objet inconnu.
– Erreur DeviceNet inconnue.
Mesure • S'assurer que l'interface DeviceNet est correctement enfichée.
• Vérifier si les connexions réseau sont correctes et si le réseau
n'est pas perturbé.
65-1 7582h Erreur communication DeviceNet Configurable
Cause Timeout de la connexion IO.
Aucun message I/O n'a été reçu pendant la période escomptée.
Mesure • Contacter le support technique.
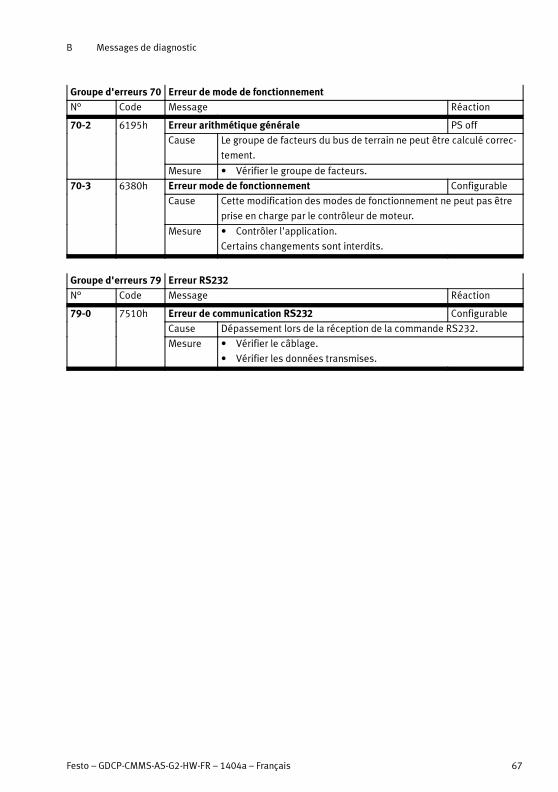
B Messages de diagnostic
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 67
Groupe d'erreurs 70 Erreur de mode de fonctionnementN° Code Message Réaction
70-2 6195h Erreur arithmétique générale PS off
Cause Le groupe de facteurs du bus de terrain ne peut être calculé correc-
tement.
Mesure • Vérifier le groupe de facteurs.
70-3 6380h Erreur mode de fonctionnement Configurable
Cause Cette modification des modes de fonctionnement ne peut pas être
prise en charge par le contrôleur de moteur.
Mesure • Contrôler l'application.
Certains changements sont interdits.
Groupe d'erreurs 79 Erreur RS232N° Code Message Réaction
79-0 7510h Erreur de communication RS232 Configurable
Cause Dépassement lors de la réception de la commande RS232.
Mesure • Vérifier le câblage.
• Vérifier les données transmises.
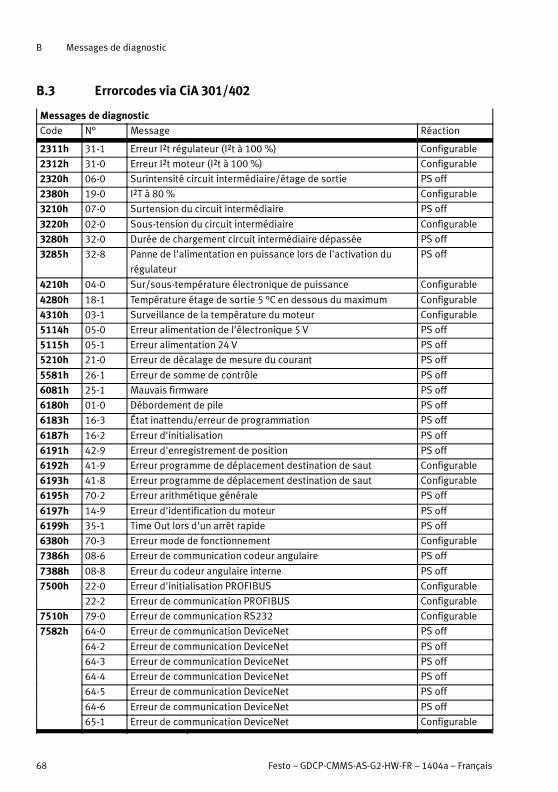
B Messages de diagnostic
68 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
B.3 Errorcodes via CiA 301/402
Messages de diagnosticCode N° Message Réaction
2311h 31-1 Erreur I²t régulateur (I²t à 100 %) Configurable
2312h 31-0 Erreur I²t moteur (I²t à 100 %) Configurable
2320h 06-0 Surintensité circuit intermédiaire/étage de sortie PS off
2380h 19-0 I²T à 80 % Configurable
3210h 07-0 Surtension du circuit intermédiaire PS off
3220h 02-0 Sous-tension du circuit intermédiaire Configurable
3280h 32-0 Durée de chargement circuit intermédiaire dépassée PS off
3285h 32-8 Panne de l'alimentation en puissance lors de l'activation du
régulateur
PS off
4210h 04-0 Sur/sous-température électronique de puissance Configurable
4280h 18-1 Température étage de sortie 5 °C en dessous du maximum Configurable
4310h 03-1 Surveillance de la température du moteur Configurable
5114h 05-0 Erreur alimentation de l'électronique 5 V PS off
5115h 05-1 Erreur alimentation 24 V PS off
5210h 21-0 Erreur de décalage de mesure du courant PS off
5581h 26-1 Erreur de somme de contrôle PS off
6081h 25-1 Mauvais firmware PS off
6180h 01-0 Débordement de pile PS off
6183h 16-3 État inattendu/erreur de programmation PS off
6187h 16-2 Erreur d'initialisation PS off
6191h 42-9 Erreur d'enregistrement de position PS off
6192h 41-9 Erreur programme de déplacement destination de saut Configurable
6193h 41-8 Erreur programme de déplacement destination de saut Configurable
6195h 70-2 Erreur arithmétique générale PS off
6197h 14-9 Erreur d'identification du moteur PS off
6199h 35-1 Time Out lors d'un arrêt rapide PS off
6380h 70-3 Erreur mode de fonctionnement Configurable
7386h 08-6 Erreur de communication codeur angulaire PS off
7388h 08-8 Erreur du codeur angulaire interne PS off
7500h 22-0 Erreur d'initialisation PROFIBUS Configurable
22-2 Erreur de communication PROFIBUS Configurable
7510h 79-0 Erreur de communication RS232 Configurable
7582h 64-0 Erreur de communication DeviceNet PS off
64-2 Erreur de communication DeviceNet PS off
64-3 Erreur de communication DeviceNet PS off
64-4 Erreur de communication DeviceNet PS off
64-5 Erreur de communication DeviceNet PS off
64-6 Erreur de communication DeviceNet PS off
65-1 Erreur de communication DeviceNet Configurable
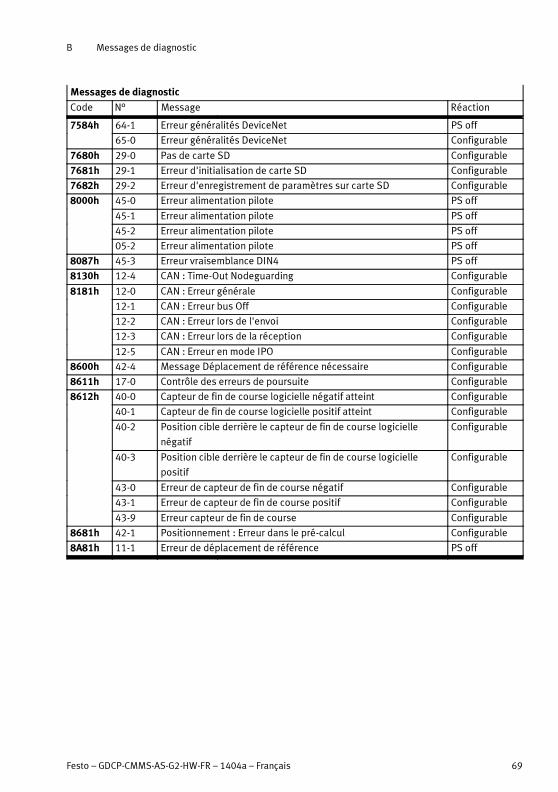
B Messages de diagnostic
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 69
Messages de diagnostic
Code RéactionMessageN°
7584h 64-1 Erreur généralités DeviceNet PS off
65-0 Erreur généralités DeviceNet Configurable
7680h 29-0 Pas de carte SD Configurable
7681h 29-1 Erreur d'initialisation de carte SD Configurable
7682h 29-2 Erreur d'enregistrement de paramètres sur carte SD Configurable
8000h 45-0 Erreur alimentation pilote PS off
45-1 Erreur alimentation pilote PS off
45-2 Erreur alimentation pilote PS off
05-2 Erreur alimentation pilote PS off
8087h 45-3 Erreur vraisemblance DIN4 PS off
8130h 12-4 CAN : Time-Out Nodeguarding Configurable
8181h 12-0 CAN : Erreur générale Configurable
12-1 CAN : Erreur bus Off Configurable
12-2 CAN : Erreur lors de l'envoi Configurable
12-3 CAN : Erreur lors de la réception Configurable
12-5 CAN : Erreur en mode IPO Configurable
8600h 42-4 Message Déplacement de référence nécessaire Configurable
8611h 17-0 Contrôle des erreurs de poursuite Configurable
8612h 40-0 Capteur de fin de course logicielle négatif atteint Configurable
40-1 Capteur de fin de course logicielle positif atteint Configurable
40-2 Position cible derrière le capteur de fin de course logicielle
négatif
Configurable
40-3 Position cible derrière le capteur de fin de course logicielle
positif
Configurable
43-0 Erreur de capteur de fin de course négatif Configurable
43-1 Erreur de capteur de fin de course positif Configurable
43-9 Erreur capteur de fin de course Configurable
8681h 42-1 Positionnement : Erreur dans le pré-calcul Configurable
8A81h 11-1 Erreur de déplacement de référence PS off
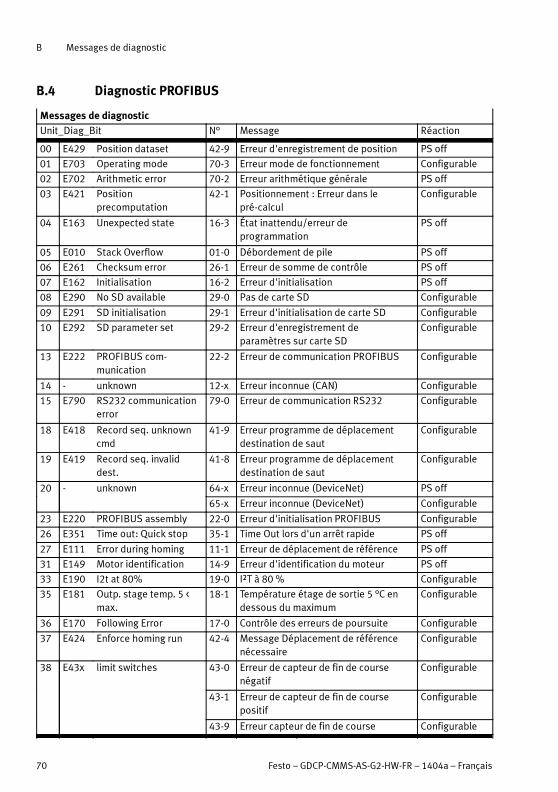
B Messages de diagnostic
70 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
B.4 Diagnostic PROFIBUS
Messages de diagnosticUnit_Diag_Bit N° Message Réaction
00 E429 Position dataset 42-9 Erreur d'enregistrement de position PS off
01 E703 Operating mode 70-3 Erreur mode de fonctionnement Configurable
02 E702 Arithmetic error 70-2 Erreur arithmétique générale PS off
03 E421 Positionprecomputation
42-1 Positionnement : Erreur dans lepré-calcul
Configurable
04 E163 Unexpected state 16-3 État inattendu/erreur deprogrammation
PS off
05 E010 Stack Overflow 01-0 Débordement de pile PS off
06 E261 Checksum error 26-1 Erreur de somme de contrôle PS off
07 E162 Initialisation 16-2 Erreur d'initialisation PS off
08 E290 No SD available 29-0 Pas de carte SD Configurable
09 E291 SD initialisation 29-1 Erreur d'initialisation de carte SD Configurable
10 E292 SD parameter set 29-2 Erreur d'enregistrement deparamètres sur carte SD
Configurable
13 E222 PROFIBUS com-munication
22-2 Erreur de communication PROFIBUS Configurable
14 - unknown 12-x Erreur inconnue (CAN) Configurable
15 E790 RS232 communicationerror
79-0 Erreur de communication RS232 Configurable
18 E418 Record seq. unknowncmd
41-9 Erreur programme de déplacementdestination de saut
Configurable
19 E419 Record seq. invaliddest.
41-8 Erreur programme de déplacementdestination de saut
Configurable
20 - unknown 64-x Erreur inconnue (DeviceNet) PS off
65-x Erreur inconnue (DeviceNet) Configurable
23 E220 PROFIBUS assembly 22-0 Erreur d'initialisation PROFIBUS Configurable
26 E351 Time out: Quick stop 35-1 Time Out lors d'un arrêt rapide PS off
27 E111 Error during homing 11-1 Erreur de déplacement de référence PS off
31 E149 Motor identification 14-9 Erreur d'identification du moteur PS off
33 E190 I2t at 80% 19-0 I²T à 80 % Configurable
35 E181 Outp. stage temp. 5 <max.
18-1 Température étage de sortie 5 °C endessous du maximum
Configurable
36 E170 Following Error 17-0 Contrôle des erreurs de poursuite Configurable
37 E424 Enforce homing run 42-4 Message Déplacement de référencenécessaire
Configurable
38 E43x limit switches 43-0 Erreur de capteur de fin de coursenégatif
Configurable
43-1 Erreur de capteur de fin de coursepositif
Configurable
43-9 Erreur capteur de fin de course Configurable
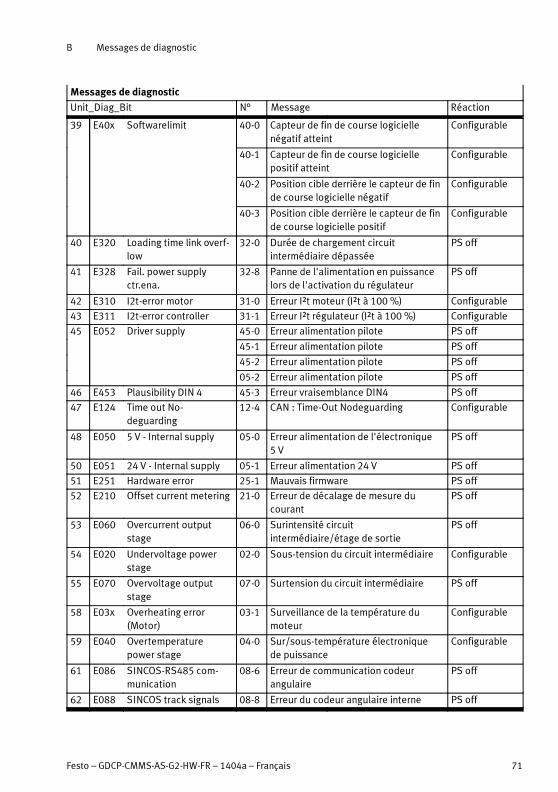
B Messages de diagnostic
Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français 71
Messages de diagnostic
Unit_Diag_Bit RéactionMessageN°
39 E40x Softwarelimit 40-0 Capteur de fin de course logiciellenégatif atteint
Configurable
40-1 Capteur de fin de course logiciellepositif atteint
Configurable
40-2 Position cible derrière le capteur de finde course logicielle négatif
Configurable
40-3 Position cible derrière le capteur de finde course logicielle positif
Configurable
40 E320 Loading time link overf-low
32-0 Durée de chargement circuitintermédiaire dépassée
PS off
41 E328 Fail. power supplyctr.ena.
32-8 Panne de l'alimentation en puissancelors de l'activation du régulateur
PS off
42 E310 I2t-error motor 31-0 Erreur I²t moteur (I²t à 100 %) Configurable
43 E311 I2t-error controller 31-1 Erreur I²t régulateur (I²t à 100 %) Configurable
45 E052 Driver supply 45-0 Erreur alimentation pilote PS off
45-1 Erreur alimentation pilote PS off
45-2 Erreur alimentation pilote PS off
05-2 Erreur alimentation pilote PS off
46 E453 Plausibility DIN 4 45-3 Erreur vraisemblance DIN4 PS off
47 E124 Time out No-deguarding
12-4 CAN : Time-Out Nodeguarding Configurable
48 E050 5 V - Internal supply 05-0 Erreur alimentation de l'électronique5 V
PS off
50 E051 24 V - Internal supply 05-1 Erreur alimentation 24 V PS off
51 E251 Hardware error 25-1 Mauvais firmware PS off
52 E210 Offset current metering 21-0 Erreur de décalage de mesure ducourant
PS off
53 E060 Overcurrent outputstage
06-0 Surintensité circuitintermédiaire/étage de sortie
PS off
54 E020 Undervoltage powerstage
02-0 Sous-tension du circuit intermédiaire Configurable
55 E070 Overvoltage outputstage
07-0 Surtension du circuit intermédiaire PS off
58 E03x Overheating error(Motor)
03-1 Surveillance de la température dumoteur
Configurable
59 E040 Overtemperaturepower stage
04-0 Sur/sous-température électroniquede puissance
Configurable
61 E086 SINCOS-RS485 com-munication
08-6 Erreur de communication codeurangulaire
PS off
62 E088 SINCOS track signals 08-8 Erreur du codeur angulaire interne PS off
CMMS-AS-C4-3A-G2
72 Festo – GDCP-CMMS-AS-G2-HW-FR – 1404a – Français
Index
AAfficheur à sept segments 13, 16. . . . . . . . . . . . .
Année de fabrication 6. . . . . . . . . . . . . . . . . . . . .
B
Blindage 24, 38. . . . . . . . . . . . . . . . . . . . . . . . . . .
Borne de mise à la terre 13, 25, 41. . . . . . . . . . . .
Borne de raccordement blindée 14, 25. . . . . . . .
Bus de terrain 17, 35. . . . . . . . . . . . . . . . . . . . . . .
– Numéros de nœud 16. . . . . . . . . . . . . . . . . . . .
– Vitesse de transmission 16, 17. . . . . . . . . . . . .
CCaractéristiques techniques 46. . . . . . . . . . . . . .
Carte mémoire SD 13, 17. . . . . . . . . . . . . . . . . . .
CEM 23, 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Blindage 24. . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Câblage 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Filtre 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Conditions de transport et de stockage 10. . . . .
DDéclaration de conformité 23. . . . . . . . . . . . . . . .
DES 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Désignation de type 6. . . . . . . . . . . . . . . . . . . . . .
Dimensions 18. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Documentation 5. . . . . . . . . . . . . . . . . . . . . . . . .
ÉÉmission de perturbations 23. . . . . . . . . . . . . . . .
Espace libre pour le montage 20. . . . . . . . . . . . .
FFCT 5, 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Firmware 5, 43. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fonction de sécurité 33, 34. . . . . . . . . . . . . . . . . .
Fourniture 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Frein de maintien 37, 38. . . . . . . . . . . . . . . . . . . .
IImmunité aux perturbations 23. . . . . . . . . . . . . .
LLED 13, 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Longueur de câble 23. . . . . . . . . . . . . . . . . . . . . .
– admissible 24. . . . . . . . . . . . . . . . . . . . . . . . . .
MMessage d'erreur 15, 54. . . . . . . . . . . . . . . . . . . .
Micro-interrupteur DIL 13, 16. . . . . . . . . . . . . . . .
Mise à la terre 25. . . . . . . . . . . . . . . . . . . . . . . . . .
NNuméro de série 5. . . . . . . . . . . . . . . . . . . . . . . . .
PPaquet opérateur 12. . . . . . . . . . . . . . . . . . . . . . .
PE 13, 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Plaque signalétique 5. . . . . . . . . . . . . . . . . . . . . .
RRésistance de freinage
– Externe 40, 41, 53. . . . . . . . . . . . . . . . . . . . . . .
– Intégrée 53. . . . . . . . . . . . . . . . . . . . . . . . . . . .
TTBTP 40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
UUsage normal 9. . . . . . . . . . . . . . . . . . . . . . . . . . .
VVersion 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

Toute communication ou reproduction de ce document, sous quelqueforme que ce soit, et toute exploitation ou communication de soncontenu sont interdites, sauf autorisation écrite expresse. Toutmanquement à cette règle est illicite et expose son auteur auversement de dommages et intérêts. Tous droits réservés pour le casde la délivrance d’un brevet, d’un modèle d’utilité ou d’un modèle deprésentation.
Copyright:Festo AG & Co. KGPostfach73726 EsslingenAllemagne
Phone:+49 711 347-0
Fax:+49 711 347-2144
e-mail:[email protected]
Internet:www.festo.com
Version originale: de