conception des racers de formule 1 - racer-club.org · la figure 2 présente l’efficacité...
TRANSCRIPT

Conception des racers de Formule 1 par George Owl (1975)
traduit de l’américain par Christophe Bozec
En 1975, une conférence sur les courses aériennes fut
organisée à California City. L’article suivant est une
traduction de la présentation donnée par George Owl sur la
conception des racers de Formule 1 à cette occasion. Bien
que certaines vérités de l’époque aient changé, notamment
en matière d’aérodynamique et de matériaux composites, il
donne une quantité importante d’informations toujours
pertinentes.
Je tiens à remercier Bill Rogers qui a bien voulu me
transmettre la présentation originale.
George Owl était un des rares concepteurs à avoir dessiné
plusieurs racers, notamment « Fang », « Lil’ Quickie » et le
plus célèbre, « Pogo ». Il avait une carrière impressionnante
dans l’industrie (ayant travaillé entre autres sur la
configuration du X‐15, du B‐70 et de la navette spatiale).
Plutôt que d’essayer de couvrir l’ensemble des
connaissances nécessaires à la conception d’un racer, qui
sont en grande partie les mêmes que pour n’importe quel
autre avion, cet article s’intéressera aux impacts sur les
performances en course des variations sur les paramètres
de conception, comme l’envergure ou l’épaisseur du profil.
La performance sur un circuit est un problème unique à
cause de l’alternance entre l’accélération en ligne droite et
de la décélération due aux virages. L’analyse classique de
performances telle que décrite dans les manuels doit être
appliquée d’une manière différente de la normale, ce qui
peut poser des difficultés aux ingénieurs novices ou aux
pilotes qui cherchent à comprendre les effets des
variations des paramètres de base.
Les performances en accélération et en décélération sont
essentiellement fonction de l’excédent de poussée (qui
peut être positif ou négatif). L’excédent de poussée
dépend de la puissance délivrée par le moteur, de
l’efficacité de l’hélice, et de la traînée de l’avion.
L’accélération (ou la décélération) résultante sur la
trajectoire est proportionnelle à cet excédent de poussée
divisé par la masse de l’avion.
La Figure 1 présente l’évolution typique de la puissance sur
arbre plein gaz en fonction de la vitesse de rotation. La
courbe a été tracée d’après les données des spécifications
Continental Motors. Il a été nécessaire d’extrapoler ces
données pour les vitesses de rotation utilisées en course,
bien plus élevées que la normale. De plus, il a fallu prendre
en compte l’augmentation de la pression d’admission par
la pression dynamique, l’effet des modifications moteur
autorisées, et la réduction frottements internes due à une
température d’huile plus élevée que la normale et des
tolérances non standard. Ces inconnues tendent à réduire
la confiance en la précision de cette courbe, mais ce n’est
pas critique pour les comparaisons qui suivent.
La Figure 2 présente l’efficacité d’hélice η et la vitesse de
rotation d’équilibre pour deux hélices typiques en Formule
1 (diamètre 58’’, pas 66’’ et diamètre 58’’, pas 64’’). Les
données ont été calculées en utilisant le manuel Hamilton
Standard et les performances moteur de la Figure 1. Le
facteur d’activité (A.F.) donne la largeur de pale relative
tandis que Cli est l’épaisseur relative. Ces paramètres ont
été choisis de telle sorte que l’on obtienne une bonne
corrélation avec les performances d’hélices connues. Le

facteur d’activité réel pour la plupart des hélices de
Formule 1 est légèrement inférieur à 100 (environ 80 à 95)
et le Cli (coefficient de portance intégré) est légèrement
supérieur à 0.5. Ces différences tendent à se compenser et
la différence par rapport aux performances présentées est
négligeable.
L’estimation de l’efficacité de l’hélice et de la puissance
moteur en fonction de la vitesse de rotation permet de
calculer la poussée plein gaz en fonction de la vitesse
propre, présentée sur la Figure 3. La relation est :
é é é
/
En unités impériales :
é é é
375
Les performances de l’hélice 58 x 64 ont été utilisées pour
tracer cette courbe. Cette hélice donnera une meilleure
accélération au décollage que la 58 x 66, et est assez
représentative des hélices généralement utilisées. Pour
une vitesse constante en vol en palier, la poussée doit être
égale à la force de traînée totale. A chaque niveau de
poussée à une vitesse considérée, présenté Figure 3,
correspond une traînée maximale permissible pour que
l’avion atteigne cette vitesse maximale. La Figure 4 illustre
ce « budget » de traînée en termes de coefficient de
traînée CD, où :
î é
Avec :
,
12
é, ⁄
La courbe supérieure de la Figure 4 représente le
coefficient de traînée CD maximal permissible, en fonction
de la vitesse maximale, pour un groupe motopropulseur
ayant les performances précédemment présentées. Si les
performances du groupe motopropulseur sont supérieures
aux estimations, alors la vitesse sera supérieure ou le
« budget » de traînée sera augmenté pour une même
vitesse. La Figure 4 montre également dans quelles
proportions la traînée totale se décompose. Le coefficient
de traînée CDf du fuselage, de l’empennage et du train
d’atterrissage est estimé, pour un Formule 1 typique, à
0.0068. Cette valeur varie en fonction de la surface
frontale, de l’effilement du fuselage, et de l’état de surface
général des éléments considérés. La traînée de l’aile est
donnée pour quatre épaisseurs, en supposant une couche
limite turbulente. Si un écoulement laminaire étendu peut
être réalisé, ces niveaux de traînée sur l’aile pourraient
être réduits de façon importante, cf Figure 22. Il doit être
noté que la plupart des racers compétitifs en Formule 1
n’ont pas de profil laminaire. L’opinion de l’auteur est
qu’un écoulement laminaire important ne peut être réalisé
en condition de course que sur une face de l’aile (extrados
ou intrados) à la fois. Sur la plupart des profils couramment
utilisés, seul l’extrados a un gradient de pression favorable
pour conserver un écoulement laminaire en vol en palier à
haute vitesse. C’est l’inverse en virage. L’écoulement
laminaire est très sensible aux gradients de pression, aux
vibrations, au bruit, à la turbulence et à l’état de surface et
ne peut donc probablement pas exister sans un gradient de
pression très favorable, qui n’existera (comme
précédemment expliqué) que sur une face de l’aile à la
fois. L’utilisation de profils relativement épais augmente
les gradients favorables sur la partie avant du profil au
détriment des gradients à l’arrière et au prix d’une vitesse
locale augmentée, qui mène à une plus forte traînée dans
les zones où l’écoulement est turbulent, et annule une
partie du gain potentiel. La conception d’un profil optimal
pour la Formule 1 est un travail très chronophage et
dépend beaucoup d’une estimation réaliste de la
probabilité d’obtenir un écoulement laminaire dans les
conditions réelles d’utilisation.
Sur la Figure 4, la zone contenue entre le niveau de traînée
de l’aile et la courbe de traînée maximum admissible est ce
qu’il reste disponible pour les traînées d’interférence, de
refroidissement, etc. La traînée de refroidissement est
également représentée comme une réduction de la
puissance disponible de 5% de la puissance et 10% de la
puissance. Un « bon » système de refroidissement peut
absorber 5% de la puissance du moteur et il est possible
de réduire cette valeur jusqu’à zéro et même peut‐être de
créer un peu de poussée en utilisant efficacement l’énergie
de l’échappement et la chaleur évacuée. Une bonne
récupération de la pression par les entrées d’air est
essentielle pour réaliser une faible traînée de
refroidissement.
Quiconque, familier avec la vision ingénieur des
performances avion peut reconnaître qu’atteindre des
vitesses de l’ordre de 260 mph (420 km/h) avec un avion
de Formule 1 est une belle réussite. Les niveaux de traînée
requis sont fantastiquement bas tandis que les
performances demandées au moteur et à l’hélice sont
extrêmement élevés. Un vrai défi !
L’auteur a entendu beaucoup de déclarations de vitesses
maximales de plus de 260 mph, mais celles‐ci ne sont
généralement pas confirmées sur le circuit. Dans la plupart
des cas, la référence de pression statique de l’anémomètre
est suspecte. L’utilisation du cockpit comme référence de
pression statique résulte invariablement en vitesses
indiquées supérieures à la réalité, à cause du champ de
basses pressions créé par l’aile et de l’écoulement accéléré
au dessus de la verrière, qui tend à aspirer l’air du cockpit.
La Figure 4 est d’une utilité incertaine pour prédire les
performances d’un appareil spécifique. Elle est sensée
illustrer l’importance relative des différents postes du bilan
de traînées et la sensibilité de la vitesse maximale aux
raffinements apportés, ce qui donne une idée des gains à
attendre. Ce qui compte sur un circuit de course est la
performance d’un avion par rapport aux autres. Dans
l’analyse, le niveau de performance est académique.
L’auteur n’a jamais essayé de réalisé un bilan de traînée
complet d’un Formule 1 avant que ce soit nécessaire pour
tracer la Figure 4. Les différences relatives de traînées
entre des avions compétitifs sont si infimes qu’elles sont
complètement masquées par les imprécisions des
estimations, les différences entre les moteurs, les hélices,
etc. Il est probablement plus payant de faire des
comparaisons de traînée élément par élément pour
trouver la meilleure solution de conception dans chaque
zone. Avant de pouvoir faire des comparaisons, pour
évaluer les mérites de différentes alternatives, il est
nécessaire de définir un « profil de mission » suivant lequel
les différentes solutions seront comparées. Pour un
Formule 1, ce profil de mission peut être représenté
comme une répétition de deux branches de base : 1) une
accélération sur une ligne droite en palier et, 2) un virage à
180° à rayon constant en décélération autour de 3 pylônes,
puis une répétition de 1), puis 2), etc. Une branche
supplémentaire présentant un intérêt important est une
accélération, depuis l’arrêt, sur une distance pouvant être
arbitrairement prise égale à 6000 pieds (1830 mètres). Les
avantages pris sur une branche doivent être comparés
avec les pertes sur une autre.
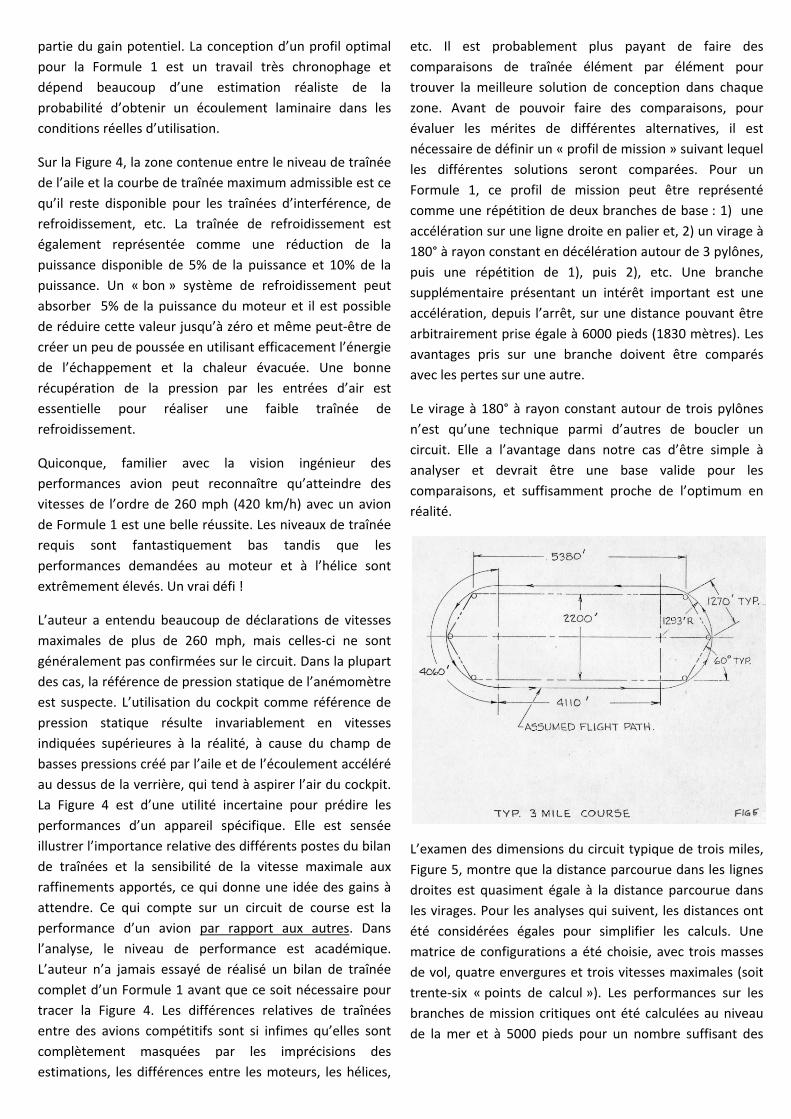
Le virage à 180° à rayon constant autour de trois pylônes
n’est qu’une technique parmi d’autres de boucler un
circuit. Elle a l’avantage dans notre cas d’être simple à
analyser et devrait être une base valide pour les
comparaisons, et suffisamment proche de l’optimum en
réalité.
L’examen des dimensions du circuit typique de trois miles,
Figure 5, montre que la distance parcourue dans les lignes
droites est quasiment égale à la distance parcourue dans
les virages. Pour les analyses qui suivent, les distances ont
été considérées égales pour simplifier les calculs. Une
matrice de configurations a été choisie, avec trois masses
de vol, quatre envergures et trois vitesses maximales (soit
trente‐six « points de calcul »). Les performances sur les
branches de mission critiques ont été calculées au niveau
de la mer et à 5000 pieds pour un nombre suffisant des

points précédents pour tracer et comparer leurs
performances relatives.
La définition du rayon de virage (Figure 5) à 1293 pieds
(394 mètres) permet de calculer le facteur de charge en
fonction de la vitesse instantanée comme présenté Figure
6.
Pour tout avion en vol sustenté, il existe un incrément de
traînée en plus de la traînée minimale présentée Figure 4.
Cette traînée résulte de la création de portance et est
appelée « traînée induite ». La Figure 7 présente de quelle
façon cette traînée augmente avec l’augmentation de la
portance (et du facteur de charge) à vitesse constante.
Remarquez que l’aile de 14 pieds d’envergure a deux ois
plus de traînée induite que l’aile de 20 pieds d’envergure
pour une même portance. Les valeurs données (à 5000
pieds et 240 mph) diminuent quand la vitesse indiquée
augmente (et quand la densité augmente).
La Figure 8 illustre les caractéristiques d’excédent de
poussée pour les points de calculs ayant des vitesses
maximales de 240, 250, et 260 mph. L’excédent de
poussée apparaît quand l’appareil est plein gaz à des
vitesses inférieures à la vitesse maximale, car la traînée de
l’avion (à 1g) diminue tandis que la poussée de l’hélice
augmente.
Une fois que les caractéristiques d’excédent de poussée et
de traînée induite sont établies pour un design donné, il
est possible de calculer l’évolution de la vitesse en fonction
du temps sur le circuit, pour chaque « branche » déjà
évoquée. Pour qu’une situation stabilisée existe, il faut que
la vitesse en sortie de virage soit égale à la vitesse au début
de la ligne droite, et que la vitesse à la fin de la ligne droite
soit égale à la vitesse à l’entrée du virage. Pour les
dimensions de circuit présentes, la vitesse moyenne doit
être, approximativement, la vitesse à laquelle la
décélération moyenne, dans le virage, est égale à
l’accélération moyenne en palier dans la ligne droite. Ceci
se produit à la vitesse où la traînée induite en virage est
égale à deux fois l’excédent de poussée moyen dans la
ligne droite. Pour résoudre cette équation sur la traînée
induite, il faut aussi que les facteurs de charge corrects
soient établis. Ceci est accompli par itérations graphiques
successives à trois vitesses arbitraires.
La Figure 9 illustre l’évolution de la vitesse en fonction du
temps pour quatre conceptions différant uniquement par
leur envergure, et ayant des vitesses maximales et des
masses égales. Ce graphique montre clairement l’effet de
l’augmentation de traînée induite lorsque l’on réduit
l’envergure. Un calcul similaire est réalisé pour les autres
points de calcul, qui donne des graphiques similaires aux
Figures 10 et 11 pour deux autres masses maximales. Pour
arriver aux moyennes en course à partir des résolutions qui
donnent la vitesse propre moyenne, il faut tenir compte de
la distance parcourue en supplément des trois miles du
circuit. La distance parcourue, dans l’exemple de profil de
mission, est de 3,10 miles ce qui indiquerait que la vitesse
en course devrait être environ 97% de la vitesse propre
moyenne. L’utilisation de ces valeurs a donné des valeurs
irréalistes et trop optimistes pour plusieurs appareils réels
dont les caractéristiques sont connues de l’auteur. L’usage
d’une valeur de vitesse moyenne sur le circuit égale à
93,5% de la vitesse propre moyenne calculée a donné une
meilleure corrélation et a donc été utilisée pour
développer les données suivantes.
La Figure 12 a été déduite des données précédentes pour
illustrer la sensibilité de la vitesse moyenne en course aux
changements de masse. Par exemple, une augmentation
de 50 lbs (22,6 kg) sur un avion de 20 pieds d’envergure
(6,1 mètres) résultera en une réduction de vitesse
moyenne de course de : 0,022 x 50 = 1,1 mph (1,8 km/h) à
5000 pieds. Pour une envergure de 14 pieds (4,3 mètres),
la diminution sera de 0,048 x 50 = 2,4 mph (3,8 km/h).
Cette pénalité est due quasi entièrement à la traînée
induite. La diminution de l’accélération dans la ligne droite
est compensée par une décélération réduite dans les
virages due au supplément d’inertie. Ceci explique peut‐
être pourquoi « Rivets » tourne aussi vite malgré une
masse relativement élevée.
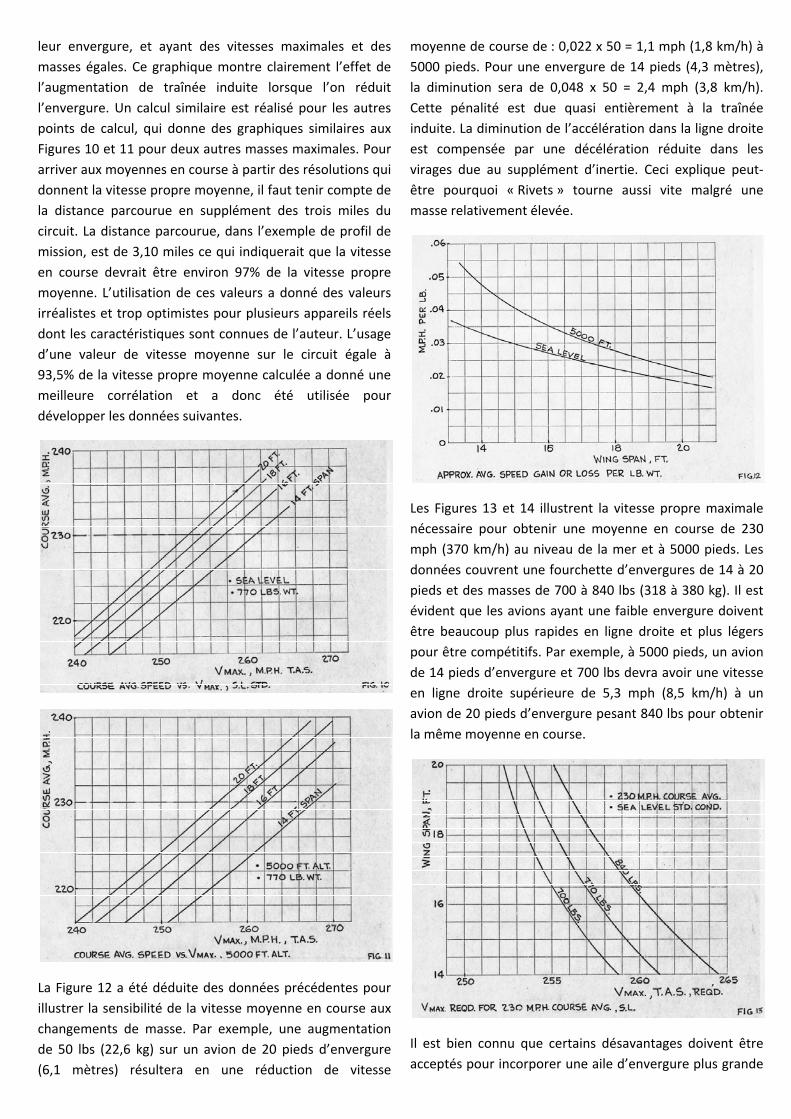
Les Figures 13 et 14 illustrent la vitesse propre maximale
nécessaire pour obtenir une moyenne en course de 230
mph (370 km/h) au niveau de la mer et à 5000 pieds. Les
données couvrent une fourchette d’envergures de 14 à 20
pieds et des masses de 700 à 840 lbs (318 à 380 kg). Il est
évident que les avions ayant une faible envergure doivent
être beaucoup plus rapides en ligne droite et plus légers
pour être compétitifs. Par exemple, à 5000 pieds, un avion
de 14 pieds d’envergure et 700 lbs devra avoir une vitesse
en ligne droite supérieure de 5,3 mph (8,5 km/h) à un
avion de 20 pieds d’envergure pesant 840 lbs pour obtenir
la même moyenne en course.
Il est bien connu que certains désavantages doivent être
acceptés pour incorporer une aile d’envergure plus grande

et ces désavantages doivent être évalués en comparaison
avec les bénéfices indiqués par les Figures 13 et 14.
Pour une épaisseur constante, la masse de l’aile augmente
rapidement avec l’envergure, et pour les ailes très
allongées, il y a des limites où le flutter et les inversions de
commande d’ailerons deviennent un problème sérieux. La
tendance naturelle est donc d’augmenter l’épaisseur
relative en même temps que l’envergure, pour limiter
l’augmentation de masse et préserver la rigidité de l’aile. Si
la possibilité de garder un écoulement laminaire est
perdue, alors l’augmentation d’épaisseur résulte en une
augmentation de la traînée minimale de l’aile et une
réduction de la vitesse maximale, comme montré sur la
Figure 15. Si l’écoulement laminaire peut être conservé sur
toute la plage de coefficients de portance nécessaires en
course, alors les ailes plus épaisses (12% à 15%) auront
probablement moins de traînée que les ailes minces (8% à
10%) car la « bosse de traînée » des profils minces n’est
pas assez large pour englober la plage de coefficients de
portance rencontrés en course, cf Figure 22. La conclusion
à tirer est que la pénalité en vitesse causée par l’épaisseur
est tout ce qu’il y a à craindre et peut être nulle jusqu’à des
épaisseurs de 15%.
Le bénéfice le plus évident d’une masse plus faible est
l’avantage lors de l’accélération au décollage. Lors d’un
départ arrêté, l’avion ayant la meilleure accélération peut
être le premier sur le circuit. Pour être battu il doit être
dépassé. Les règles de dépassement obligent l’avion
dépassant à faire des virages à plus grand rayon que l’avion
dépassé en volant à l’extérieur ou au‐dessus (faire des
circuits « hauts » résulte quasi inévitablement en des
virages plus larges). Il faut bien noter qu’il faut une
différence de vitesse importante pour pouvoir dépasser,
avec la marge de sécurité, sur la longueur d’une ligne
droite, et que parce que nous avons des différences de
vitesses faibles, il nous faut considérer le cas du
dépassement en virage. La Figure 16 illustre la différence
de vitesse maximale nécessaire pour parcourir le virage
sans perdre de terrain en volant 50 pieds (15 mètres) à
l’extérieur de la trajectoire de l’avion dépassé, pour deux
avions ayant la même envergure et la même masse. Pour
les autres envergures et masses, on peut estimer
l’avantage de vitesse maximale nécessaire est celui
permettant une augmentation de la vitesse moyenne de
course de 3,5 mph (5,6 km/h). La conclusion est donc
qu’un avion qui a un avantage de vitesse moyenne en
course de moins de 3,5 mph sur un concurrent doit le
battre avant d’entrer sur le circuit pour l’emporter, sauf
erreur de pilotage.
Un facteur qui complique l’estimation de l’accélération au
décollage par rapport à la vitesse en course est le fait que
la position de l’avion sur la ligne de départ est déterminée
par la vitesse aux qualifications, le premier ayant le
premier choix de position, etc. L’important ici est que le
premier aux qualifications peut choisir de démarrer côté
intérieur et ainsi forcer les autres concurrents à accélérer
plus vite que lui avec une marge suffisante pour couper le
premier pylône devant lui et lui prendre l’intérieur du
circuit. Si un « intervalle de sécurité » peut être défini,
alors il est possible d’estimer quelle différence de masse

ou de poussée est nécessaire pour prendre l’intérieur du
circuit au décollage devant un avion plus rapide aux
qualifications.
La Figure 17 donne la distance parcourue en fonction du
temps pour un décollage représentatif de la Formule 1.
Aucune donnée n’est disponible pour calculer avec
précision la poussée statique et à faible vitesse des hélices
de course. Les courbes ont été construites en itérant
plusieurs valeurs de poussée en fonction de la vitesse
jusqu’à ce qu’on obtienne une bonne corrélation avec une
vitesse mesurée à une distance connue. En utilisant ces
performances comme base il est possible de calculer
l’intervalle entre deux avions (différant seulement par leur
masse) 37 secondes après le lâcher des freins, cf Figure 18.
La durée, 37 secondes, a été choisie comme
approximativement la durée nécessaire pour atteindre le
pylône « scatter », où la question de qui a l’intérieur est
réglée. Comme montré sur la Figure 18, un avion qui pèse
95% à 96% de la masse du compétiteur devrait être
environ 200 pieds en avant (61 mètres), tous les autres
paramètres étant égaux, et ainsi avoir suffisamment de
marge pour prendre l’intérieur du circuit.
La Figure 19 illustre la différence de distance atteinte 37
secondes après le départ en fonction de la poussée
statique. Une augmentation de la poussée statique peut
être obtenue par un pas d’hélice plus petit et/ou un
diamètre plus grand, ou plus de puissance. Pour cette
comparaison, on suppose que l’augmentation ou la
diminution de poussée statique, par rapport à la référence,
diminue jusqu’à être nulle à 200 mph (320 km/h), comme
ce pourrait être le cas pour une hélice ayant un pas
différent. Les données indiquent qu’une augmentation de
7% de la poussée statique donnera une avance de 200
pieds au pylône scatter. Une conclusion possible est que si
vous essayez de battre un concurrent qui a une vitesse
quasiment égale (pas suffisamment de marge pour
dépasser sur le circuit), il peut être intéressant de passer à
une hélice ayant moins de pas si cela permet de le
dépasser avant d’entrer sur le circuit sans pour autant
sacrifier tellement de vitesse qu’il puisse ensuite dépasser.
La Figure 20 illustre la différence de masse estimée entre
des longerons en bois typiques de Formule 1, comparés à
une référence de 20 pieds d’envergure et 12% d’épaisseur.
La masse des autres éléments de l’aile changera très peu
en fonction de l’envergure et de l’épaisseur, et la variation
de la masse du longeron est supposée être la variation de

masse totale de l’aile pour la réalisation de la figure
suivante.
Ayant estimé l’effet sur les performances des changements
en envergure, masse et épaisseur de l’aile, et des
changements de masse dus aux changements d’épaisseur
et d’envergure, il est possible de tracer un graphique
combinant les effets sur la masse et la traînée des
changements en envergure et en épaisseur, et de prédire
leurs effets sur la vitesse moyenne de course.
La Figure 21 illustre ces variations de performances à 5000
pieds. Au niveau de la mer, la détérioration de
performances avec la réduction d’envergure est
légèrement moindre.
Il est intéressant de voir que les combinaisons ayant des
vitesses moyennes en courses égales sur la Figure 21 ont
également une masse d’aile sensiblement égale (cf Figure
20), et donc potentiellement la même accélération au
décollage. Cette conclusion ne tient cependant que
lorsqu’on compare des appareils ayant une différence de 2
ou 3 pieds en envergure et dépend beaucoup de
l’hypothèse qu’un écoulement laminaire étendu ne peut
être réalisé. De plus, les données de la Figure 21 résultent
de compilations de données basées sur de petites
différences dans des valeurs assez grandes. Dans la réalité,
ces petites différences sont généralement noyées par
d’autres facteurs comme la qualité de fabrication,
l’efficacité du groupe motopropulseur ou le talent du
pilote.
L’objectif de cet article était de donner un aperçu des
combinaisons de géométries d’aile qui peuvent donner le
meilleur potentiel pour gagner sur un circuit. La réponse
est claire, il faut un avion de 500 livres, 60 pieds
d’envergure, un profil de 3% d’épaisseur, et un moteur qui
tourne une hélice de 68’’ de pas à 4500 tours/minute.
Bonne chance !