chapitre 4 : les forces - accueiljmdeconto.pagesperso-orange.fr/mecanique4.pdf · 4.2 qu’est ce...
TRANSCRIPT
Chapitre 4 : Les forces Aborder la mécanique sans traiter de la nature des forces serait un non-sens. Aussi nous proposons ici, de matière non-exhaustive, d’aborder :
• Les forces fondamentales connues dans l’univers connu (notez les précautions oratoires) et qui sont au nombre de quatre.
• Les forces de frottement, parce qu’elles sont essentielles en mécanique. Par exemple, un mécanicien sait parfaitement qu’il est nécessaire de laisser un jeu entre des pièces mécaniques pour ne pas bloquer le système. Il sait également qu’un jeu d’un centième de millimètre est bien souvent une utopie de théoricien. Ce jeu est requis à cause des forces de frottements et il est souvent nécessaire de bien choisir la nature des matériaux en contact (pièces en laiton, poudres métalliques associées à du graphite etc) qui réduisent les frottements ou lubrifient les contacts (cas du graphite pour les pièces mobiles).
• Quelques forces comme la tension, pour mémoire. 4.1 Les interactions fondamentales. Elles sont au nombre de quatre :
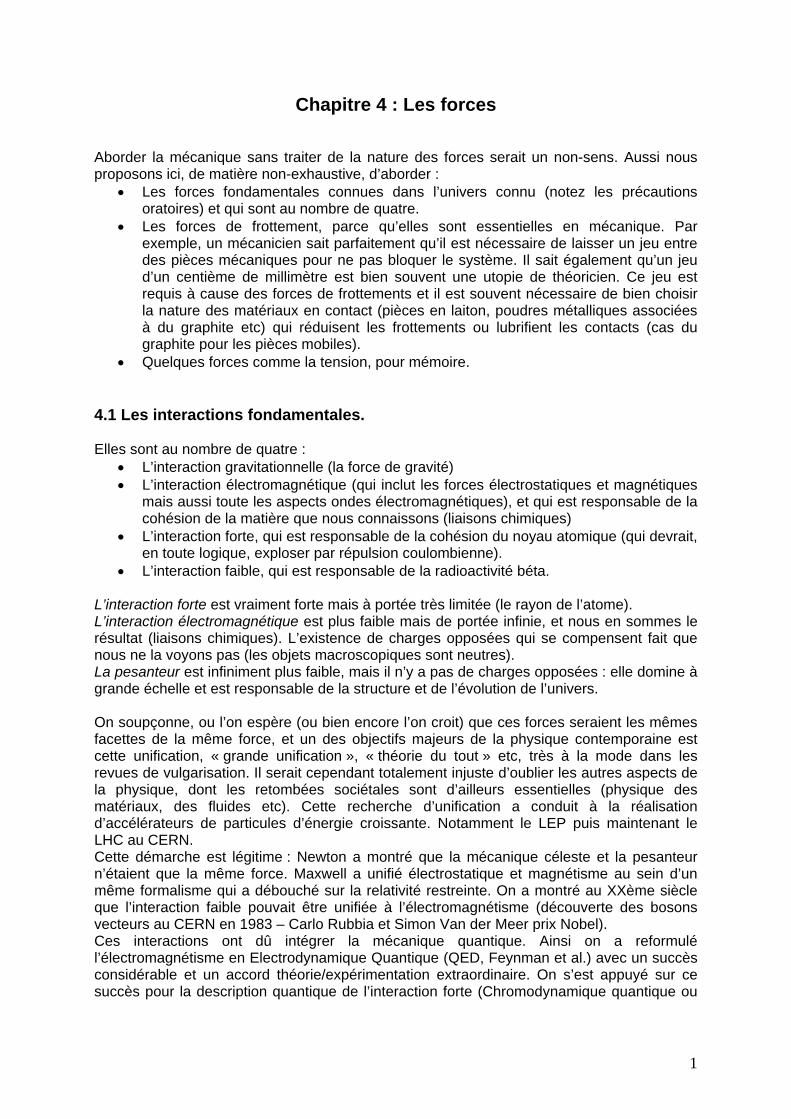
• L’interaction gravitationnelle (la force de gravité) • L’interaction électromagnétique (qui inclut les forces électrostatiques et magnétiques
mais aussi toute les aspects ondes électromagnétiques), et qui est responsable de la cohésion de la matière que nous connaissons (liaisons chimiques)
• L’interaction forte, qui est responsable de la cohésion du noyau atomique (qui devrait, en toute logique, exploser par répulsion coulombienne).
• L’interaction faible, qui est responsable de la radioactivité béta. L’interaction forte est vraiment forte mais à portée très limitée (le rayon de l’atome). L’interaction électromagnétique est plus faible mais de portée infinie, et nous en sommes le résultat (liaisons chimiques). L’existence de charges opposées qui se compensent fait que nous ne la voyons pas (les objets macroscopiques sont neutres). La pesanteur est infiniment plus faible, mais il n’y a pas de charges opposées : elle domine à grande échelle et est responsable de la structure et de l’évolution de l’univers. On soupçonne, ou l’on espère (ou bien encore l’on croit) que ces forces seraient les mêmes facettes de la même force, et un des objectifs majeurs de la physique contemporaine est cette unification, « grande unification », « théorie du tout » etc, très à la mode dans les revues de vulgarisation. Il serait cependant totalement injuste d’oublier les autres aspects de la physique, dont les retombées sociétales sont d’ailleurs essentielles (physique des matériaux, des fluides etc). Cette recherche d’unification a conduit à la réalisation d’accélérateurs de particules d’énergie croissante. Notamment le LEP puis maintenant le LHC au CERN. Cette démarche est légitime : Newton a montré que la mécanique céleste et la pesanteur n’étaient que la même force. Maxwell a unifié électrostatique et magnétisme au sein d’un même formalisme qui a débouché sur la relativité restreinte. On a montré au XXème siècle que l’interaction faible pouvait être unifiée à l’électromagnétisme (découverte des bosons vecteurs au CERN en 1983 – Carlo Rubbia et Simon Van der Meer prix Nobel). Ces interactions ont dû intégrer la mécanique quantique. Ainsi on a reformulé l’électromagnétisme en Electrodynamique Quantique (QED, Feynman et al.) avec un succès considérable et un accord théorie/expérimentation extraordinaire. On s’est appuyé sur ce succès pour la description quantique de l’interaction forte (Chromodynamique quantique ou
1
QCD). On cherche maintenant à unifier QED et QCD (modèles dits de supersymétrie, qui prédisent de nouvelles particules). Enfin, le rêve ultime serait d’unifier tout cela avec la gravitation, ce qui pour l’instant et malgré quelques théories très en vogue, et portées par les esprits les plus brillants, reste un échec (théorie des cordes, gravité à boucles, géométrie non-commutative)
Les interactions fondamentales (Auteur : Mme Fabienne Ledroit – Laboratoire de Physique Subatomique et de Cosmologie – Grenoble et CERN)
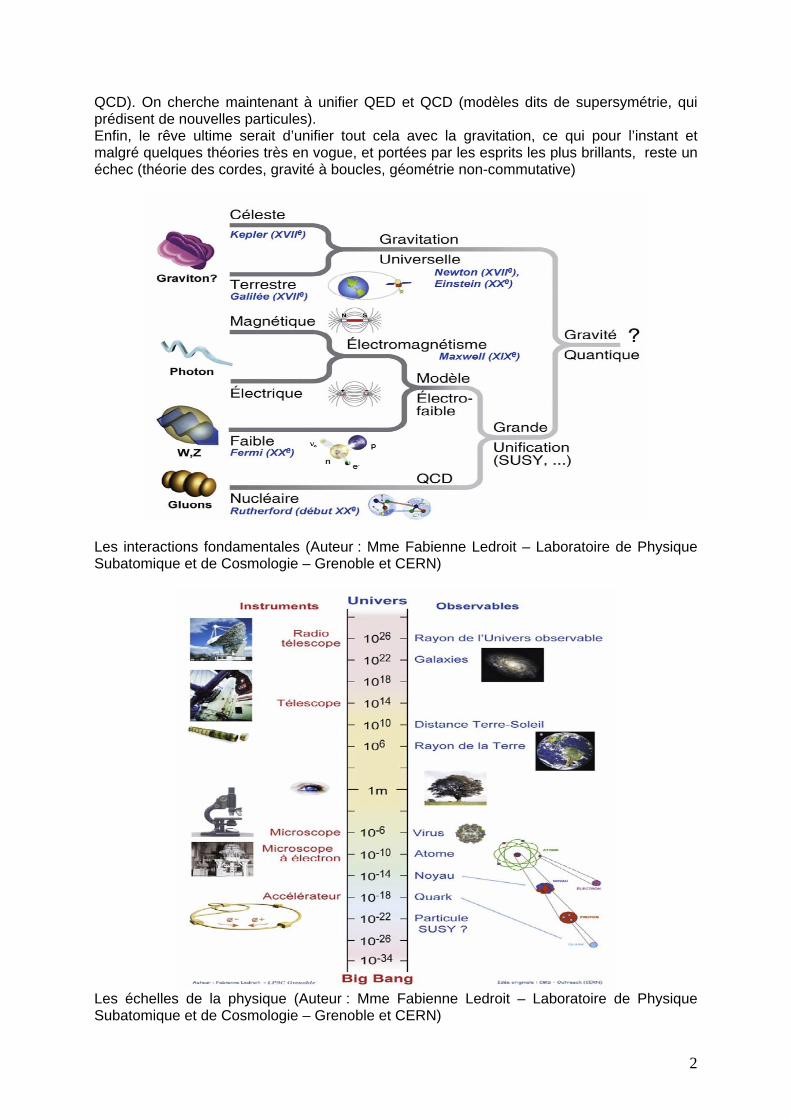
Les échelles de la physique (Auteur : Mme Fabienne Ledroit – Laboratoire de Physique Subatomique et de Cosmologie – Grenoble et CERN)
2
uu
uu dd
Du plus grand au plus petit (CERN)
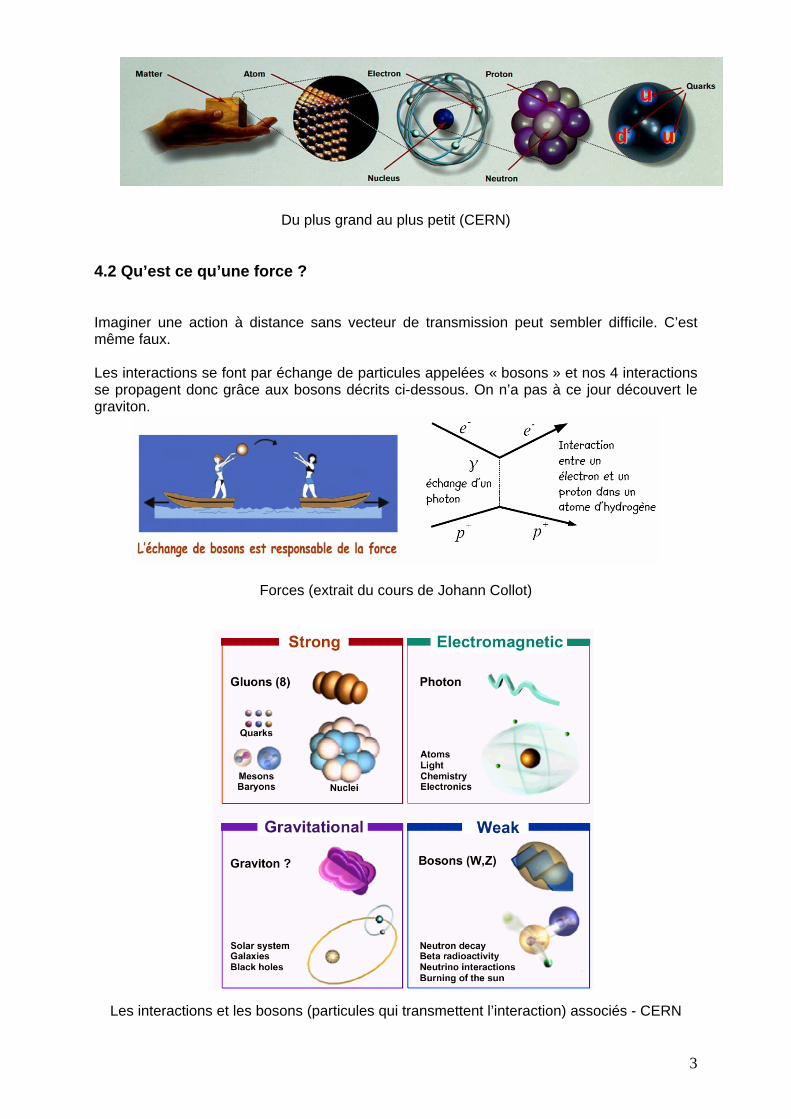
4.2 Qu’est ce qu’une force ? Imaginer une action à distance sans vecteur de transmission peut sembler difficile. C’est même faux. Les interactions se font par échange de particules appelées « bosons » et nos 4 interactions se propagent donc grâce aux bosons décrits ci-dessous. On n’a pas à ce jour découvert le graviton.
Forces (extrait du cours de Johann Collot)
Les interactions et les bosons (particules qui transmettent l’interaction) associés - CERN
3
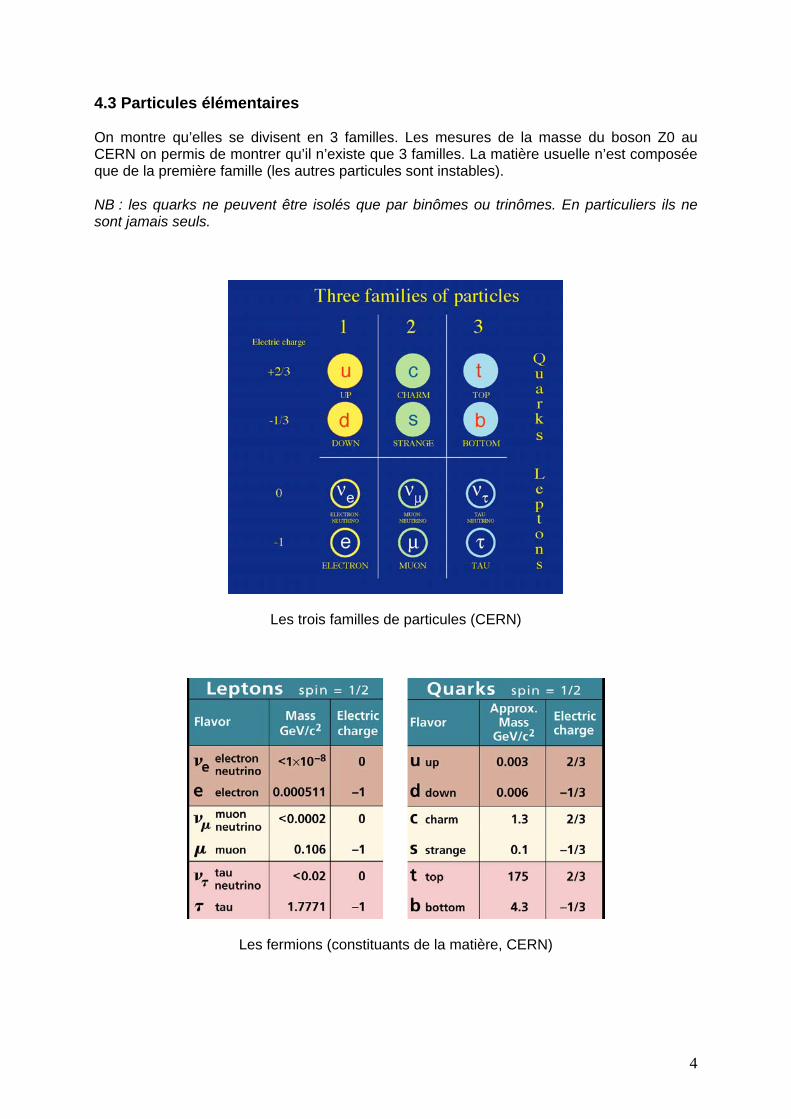
4.3 Particules élémentaires On montre qu’elles se divisent en 3 familles. Les mesures de la masse du boson Z0 au CERN on permis de montrer qu’il n’existe que 3 familles. La matière usuelle n’est composée que de la première famille (les autres particules sont instables). NB : les quarks ne peuvent être isolés que par binômes ou trinômes. En particuliers ils ne sont jamais seuls.
Les trois familles de particules (CERN)
Les fermions (constituants de la matière, CERN)
4
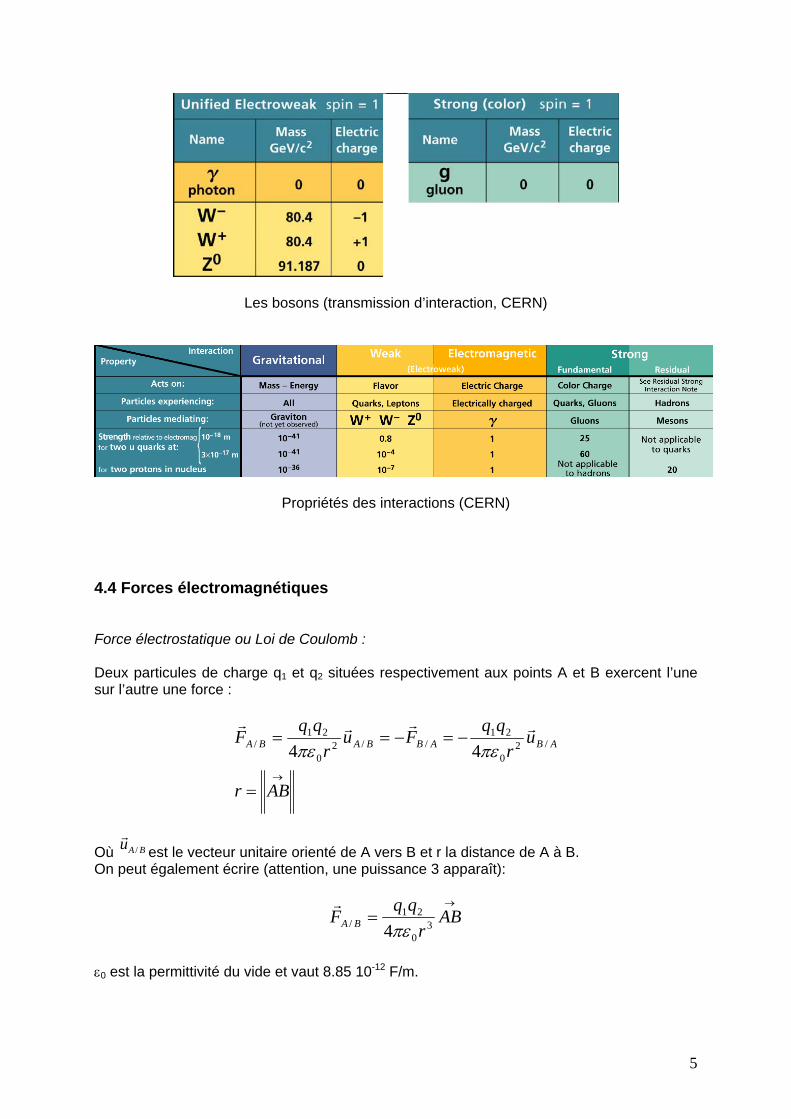
Les bosons (transmission d’interaction, CERN)
Propriétés des interactions (CERN)
4.4 Forces électromagnétiques Force électrostatique ou Loi de Coulomb : Deux particules de charge q1 et q2 situées respectivement aux points A et B exercent l’une sur l’autre une force :
→
=
−=−==
ABr
ur
qqFur
qqF ABABBABA /20
21//2
0
21/ 44
rrrr
πεπε
Où est le vecteur unitaire orienté de A vers B et r la distance de A à B. BAu /r
On peut également écrire (attention, une puissance 3 apparaît):
→
= ABr
qqF BA 30
21/ 4πε
r
ε0 est la permittivité du vide et vaut 8.85 10-12 F/m.
5

Force de Lorentz
Dans un champ électrique→
E , la force s’exerçant sur une particule de charge q est donnée par :
EqFe
r=
→
Dans un champ magnétique ou plus précisément dans un champ d’induction magnétique, la
force s’exerçant sur une particule de charge q et de vitesse est donnée par : →
v
BvqFm
rr∧=
→
Attention, B s’exprime en teslas. Il ne faut pas confondre l’induction B avec le champ magnétique H qui s’exprime en ampères par mètre. Cependant, un abus de langage est admis quand seul le champ B est utilisé (trajectoire d’une particule chargée dans un spectromètre). Il n’est pas acceptable quand B et H sont présent (calcul de l’aimant du spectromètre par exemple). La force de Lorentz est la force s’exerçant sur une particule chargée se déplaçant dans un champ électromagnétique :
( )BvEqFrrr
∧+=→
Commentaires :
• La force magnétique est perpendiculaire au vecteur vitesse. Par conséquent, la force magnétique ne travaille pas. Elle modifie la direction du vecteur vitesse mais pas sa norme. La force magnétique ne permet pas de changer l’énergie cinétique. Elle est utilisée pour du guidage et de la focalisation.
• La force électrique est orientée comme le champ électrique. Elle peut donc travailler et est utilisée, outre pour de la déflection, pour changer l’énergie cinétique.
• Dans les deux cas il y a accélération. Accélération ne signifie pas changement d’énergie cinétique mais changement de vitesse. On peut avoir changement de direction ou changement de norme, ou les deux.
4.5 Gravitation Deux particules de charge m1 et m2 situées respectivement aux points A et B exercent l’une sur l’autre une force :
→
=
−=−==
ABr
urmmKFu
rmmKF ABABBABA /2
21//2
21/
rrrr
Où BAu /r
est le vecteur unitaire orienté de A vers B et r la distance de A à B. K=6.67 10-11 m3/kg/s2
Cette loi est remarquablement vérifiée à notre échelle à deux réserves près :
6
Elle est inexacte pour les champs gravitationnels forts, où la relativité générale est requise. Dans le cas du GPS, une correction de relativité générale est en effet requise (outre celles de relativité restreinte) car la gravité a une incidence sur les horloges de synchronisation. Elle n’est vérifiée expérimentalement que pour des distances supérieures au mm ou au cm (c’est déjà très difficile à mesurer). Au niveau atomique, on ne sait pas. 4.6 Une application du théorème de Gauss Ceci n’est valable que pour les répartitions de charge ou de masse à symétrie sphérique Une charge totale Q répartie uniformément sur une sphère de rayon R exerce sur une charge q située en A à une distance r du centre O de la sphère une force égale à :
• 0 si r<R
• AOAO ur
QqF /20
/ 4rr
πε= si r>R
Une masse totale M répartie uniformément sur une sphère de rayon R exerce sur une charge m située en A à une distance r du centre O de la sphère une force égale à :
• 0 si r<R
• AOAO ur
MmKF /2/rr
= si r>R
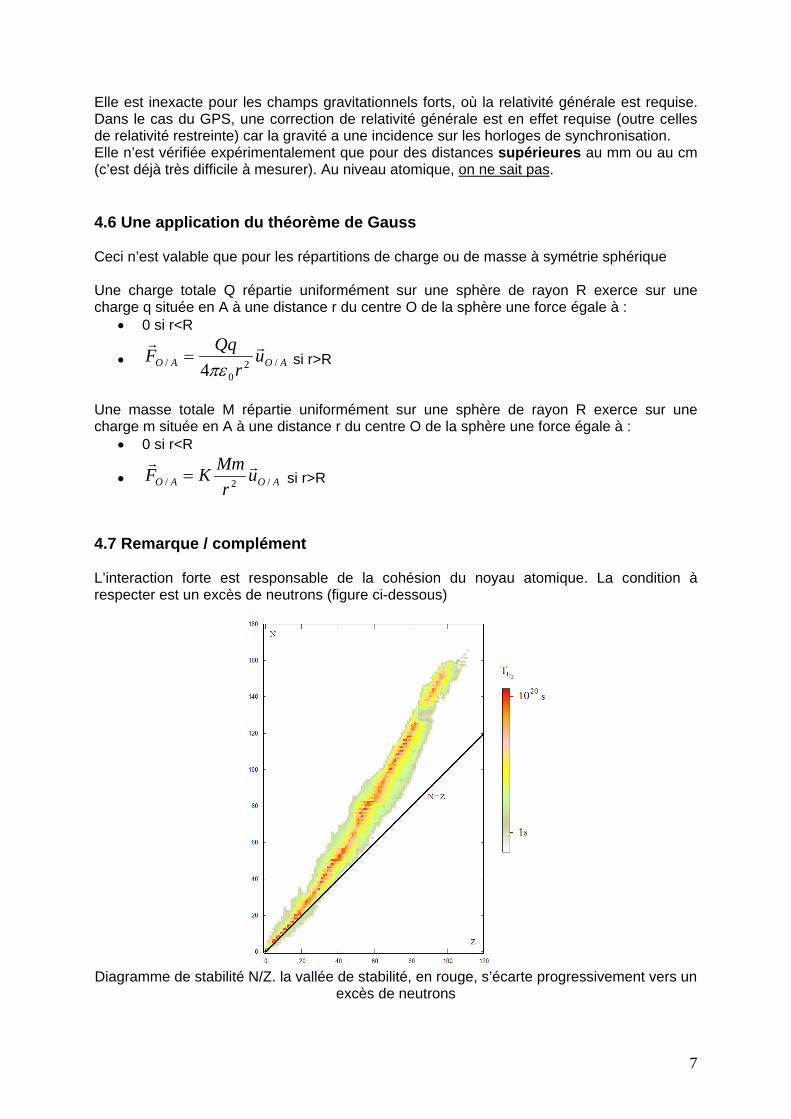
4.7 Remarque / complément L’interaction forte est responsable de la cohésion du noyau atomique. La condition à respecter est un excès de neutrons (figure ci-dessous)
Diagramme de stabilité N/Z. la vallée de stabilité, en rouge, s’écarte progressivement vers un
excès de neutrons
7
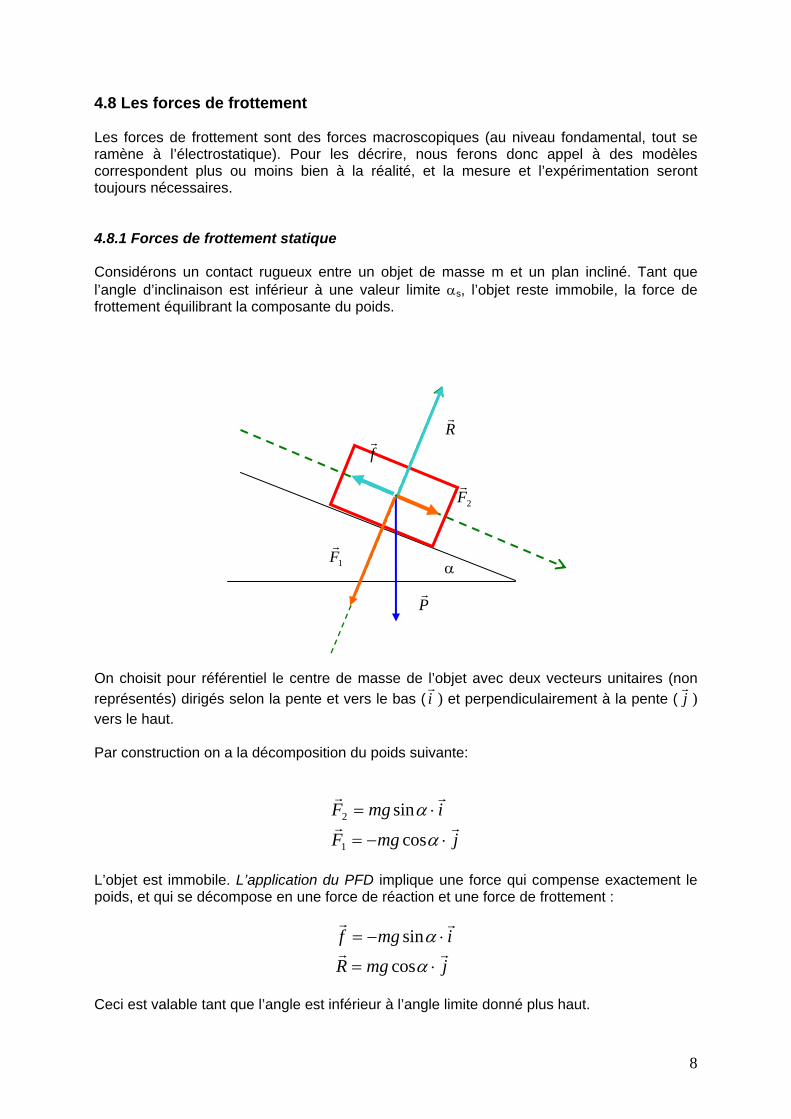
4.8 Les forces de frottement Les forces de frottement sont des forces macroscopiques (au niveau fondamental, tout se ramène à l’électrostatique). Pour les décrire, nous ferons donc appel à des modèles correspondent plus ou moins bien à la réalité, et la mesure et l’expérimentation seront toujours nécessaires. 4.8.1 Forces de frottement statique Considérons un contact rugueux entre un objet de masse m et un plan incliné. Tant que l’angle d’inclinaison est inférieur à une valeur limite αs, l’objet reste immobile, la force de frottement équilibrant la composante du poids.
α
Pr
1Fr
2Fr
Rr
fr
On choisit pour référentiel le centre de masse de l’objet avec deux vecteurs unitaires (non représentés) dirigés selon la pente et vers le bas ( i
r) et perpendiculairement à la pente ( j
r)
vers le haut. Par construction on a la décomposition du poids suivante:
jmgF
imgFrr
rr
⋅−=
⋅=
α
α
cos
sin
1
2
L’objet est immobile. L’application du PFD implique une force qui compense exactement le poids, et qui se décompose en une force de réaction et une force de frottement :
jmgR
imgfrr
rr
⋅=
⋅−=
α
α
cos
sin
Ceci est valable tant que l’angle est inférieur à l’angle limite donné plus haut.
8
De manière générale on a :
Rf
=αtan
A la limite on a :
ss kRf==αtan
Définition : On appelle coefficient de frottement statique la tangente de l’angle limite au-delà duquel le glissement s’amorce. De manière générale, la force de frottement vérifie :
Rkf s< quand on est en situation statique
Rkf s= quand on est à la limite du glissement R est dans tous les cas la réaction du support. Quand le glissement est amorcé, on passe en régime de glissement dynamique Remarque très importante : le sens de la force de frottement statique n’est pas nécessairement opposé au mouvement. Si ceci est vrai pour un skieur, ceci est totalement faux pour un objet emporté par un tapis roulant. Egalement, c’est parce que les pneus ont une adhérence qu’une voiture peut remonter une pente : si la force de frottement contrariait le mouvement, on aurait intérêt à prendre des pneus lisses. A la descente c’est heureusement l’inverse. On s’attachera donc à déterminer dans quel sens agit la force de frottement avant de partir dans des calculs douteux. 4.8.2 Forces de frottement dynamique Quand le régime passe de statique à dynamique, la force de frottement reste proportionnelle à la réaction du support mais avec les différences suivantes :
• Le cœfficient de frottement dynamique kd est inférieur à ks
• La force de frottement s’oppose toujours au mouvement. Détermination des coefficients de frottement entre deux matériaux On prend un objet d’un matériau donné que l’on appuie sur une surface constituée de l’autre matériau (cf figure). On exerce une force verticale P (ce peut être le poids seul, mais en général, on appuie avec une force calibrée). La valeur F0 de la force latérale F pour laquelle le glissement s’amorce vérifie :
PkF s=0
On représente qualitativement sur la seconde figure suivante la force de frottement en fonction de la force latérale. Tant que l’on est en régime statique, la force de frottement est
9
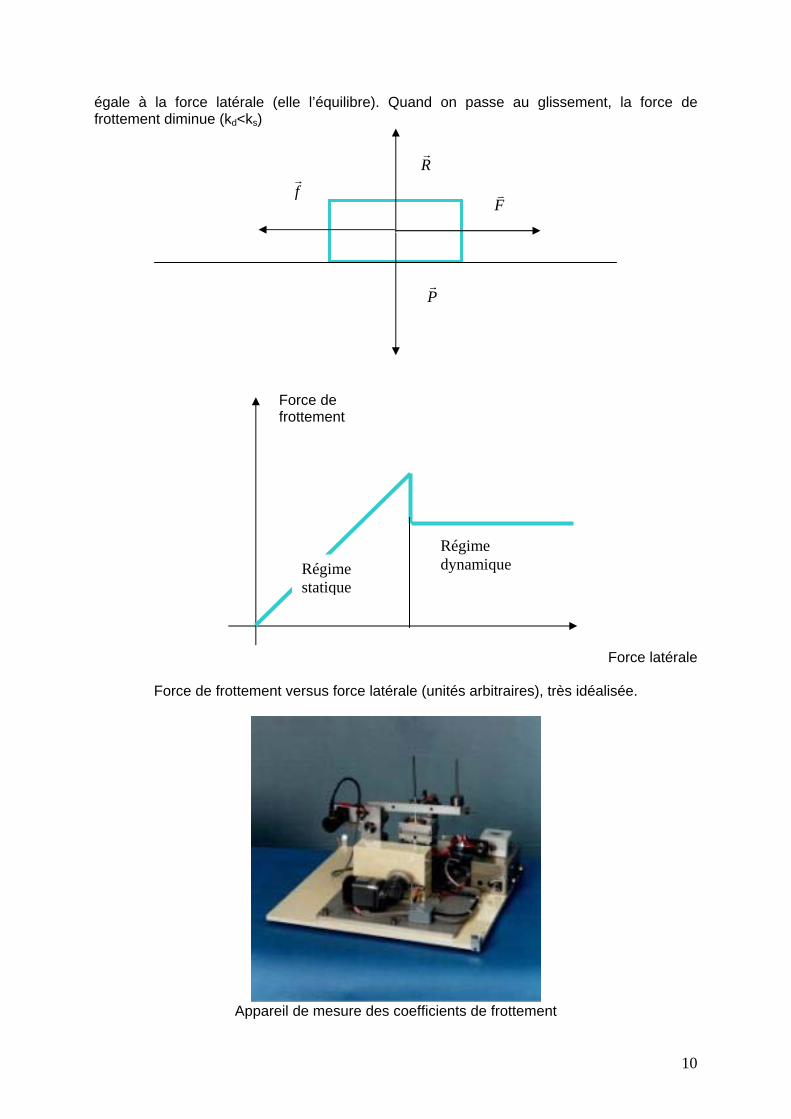
égale à la force latérale (elle l’équilibre). Quand on passe au glissement, la force de frottement diminue (kd<ks)
Force de frottement
Pr
Fv
Rr
fr
Régime dynamique Régime
statique
Force latérale
Force de frottement versus force latérale (unités arbitraires), très idéalisée.
Appareil de mesure des coefficients de frottement
10
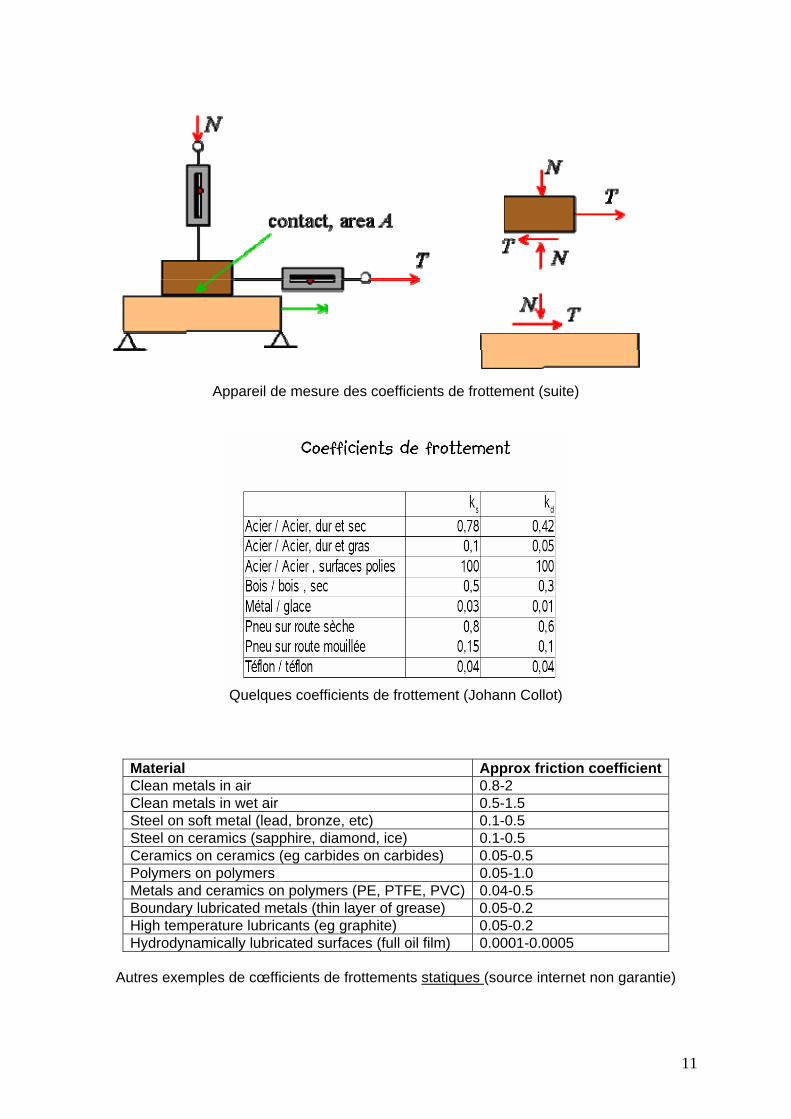
Appareil de mesure des coefficients de frottement (suite)
Quelques coefficients de frottement (Johann Collot)
Material Approx friction coefficientClean metals in air 0.8-2 Clean metals in wet air 0.5-1.5 Steel on soft metal (lead, bronze, etc) 0.1-0.5 Steel on ceramics (sapphire, diamond, ice) 0.1-0.5 Ceramics on ceramics (eg carbides on carbides) 0.05-0.5 Polymers on polymers 0.05-1.0 Metals and ceramics on polymers (PE, PTFE, PVC) 0.04-0.5 Boundary lubricated metals (thin layer of grease) 0.05-0.2 High temperature lubricants (eg graphite) 0.05-0.2 Hydrodynamically lubricated surfaces (full oil film) 0.0001-0.0005
Autres exemples de cœfficients de frottements statiques (source internet non garantie)
11

Appareil de mesure des coefficients de frottement statiques et dynamiques
Allure réelle (expérimentale) des courbes caractéristiques (Ref : Institut Supérieur de Mécanique de Paris -Supméca-)
12
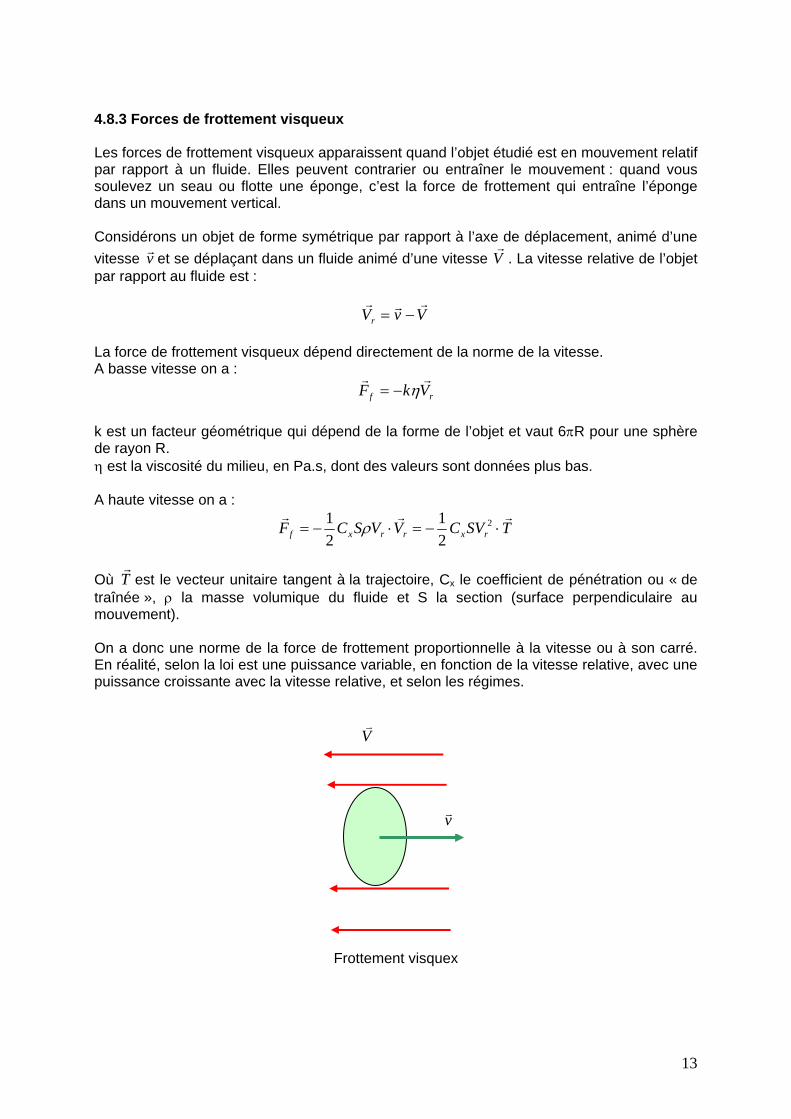
4.8.3 Forces de frottement visqueux Les forces de frottement visqueux apparaissent quand l’objet étudié est en mouvement relatif par rapport à un fluide. Elles peuvent contrarier ou entraîner le mouvement : quand vous soulevez un seau ou flotte une éponge, c’est la force de frottement qui entraîne l’éponge dans un mouvement vertical. Considérons un objet de forme symétrique par rapport à l’axe de déplacement, animé d’une vitesse et se déplaçant dans un fluide animé d’une vitesse Vvr
r. La vitesse relative de l’objet
par rapport au fluide est :
VvVr
rrr−=
La force de frottement visqueux dépend directement de la norme de la vitesse. A basse vitesse on a :
rf VkFrr
η−=
k est un facteur géométrique qui dépend de la forme de l’objet et vaut 6πR pour une sphère de rayon R. η est la viscosité du milieu, en Pa.s, dont des valeurs sont données plus bas. A haute vitesse on a :
TSVCVVSCF rxrrxf
rrr⋅−=⋅−= 2
21
21 ρ
Où T
rest le vecteur unitaire tangent à la trajectoire, Cx le coefficient de pénétration ou « de
traînée », ρ la masse volumique du fluide et S la section (surface perpendiculaire au mouvement). On a donc une norme de la force de frottement proportionnelle à la vitesse ou à son carré. En réalité, selon la loi est une puissance variable, en fonction de la vitesse relative, avec une puissance croissante avec la vitesse relative, et selon les régimes.
Vv
vv
Frottement visquex
13

Quelques valeurs du coefficient de trainée (source EPFL)
Le régime (la puissance de la vitesse mais aussi le coefficient de traînée) dépend en fait du nombre de Reynolds. On peut le définir ainsi (il est sans dimension)
ν
ηρ
DV
DV
=
=
Re
Re
Où V est la vitesse moyenne (relative) du fluide, ρ sa masse volumique, η la viscosité dynamique et ν égal au rapport η/ρ
A faible nombre de Reynolds le régime est laminaire, et devient progressivement turbulent.
Régime d’écoulement laminaire (à gauche) et turbulent (à droite) autour d’un cylindre.
Quelques valeurs de viscosités (Johann Collot)
Nous n’irons pas plus loin dans ce domaine, qui sort du cadre de ce cours et qui est traité en mécanique des fluides.
14
Conclusion : que retenir ? Il est indispensable de bien connaître le formalisme théorique des forces de frottement statiques, dynamiques et visqueux, afin de consacrer son énergie à la résolution des problèmes plutôt qu’à l’invention de la roue. Nous y consacrerons des travaux dirigés. Les forces de gravitation, coulombienne et de Lorentz sont à connaître également parfaitement. Nous n’y consacrerons pas de travaux dirigés. Les interactions fondamentales sont à connaître au plan de la formation générale (qui est un peu plus que la culture) en physique. Il peut vous être demandé quelles sont les 4 interactions et ce qu’elles représentent, même si aucun TD n’est effectué (le cours fait partie de la formation à part entière).
15