chapitre 3 - s21182c7956f6fcf0.jimcontent.com · compacteur de canettes moment en d : 50 y 21 –...
TRANSCRIPT
Chapitre 3 APPLICATION AUX PROBLEMES
PLANS
Objectif:
Simplifier la modélisation des actions mécaniques, et donc la résolution

x
y
z
F2 F2 F1 F1
P
x
y
P
2F2
2F1
O
1. DEFINITION D’UN PROBLEME PLAN
Liaisons et actions mécaniques extérieures sont disposées symétriquement par rapport à ce plan.
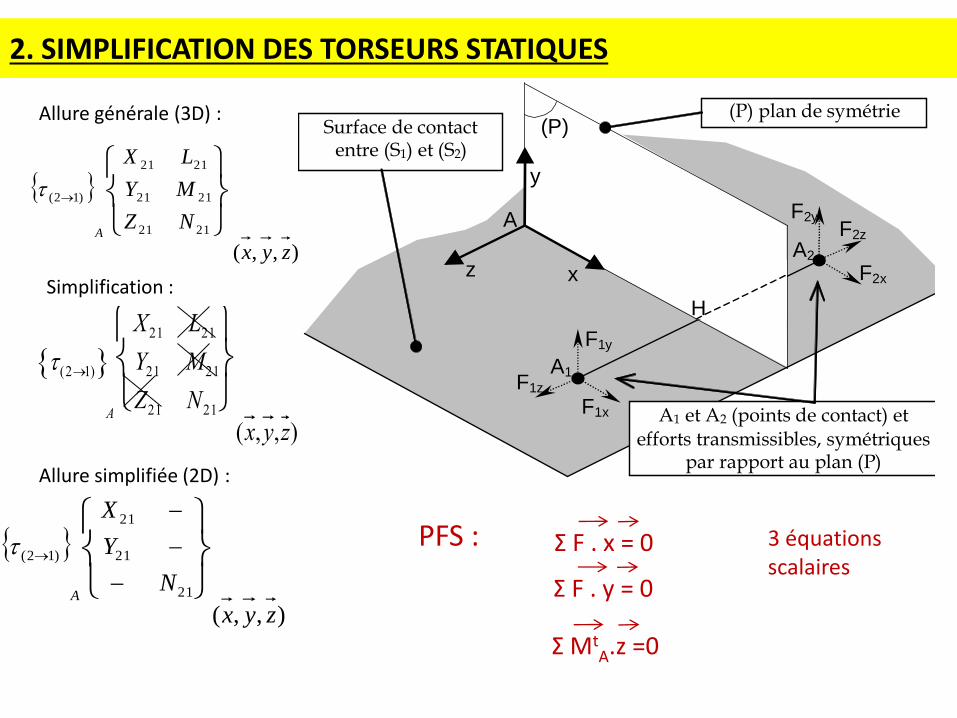
2. SIMPLIFICATION DES TORSEURS STATIQUES
(P) plan de symétrie
(P)
A
x
y
z A2
H
Surface de contact entre (S1) et (S2)
F1zz
F1y
F1x
A1
F2z F2y
F2x
A1 et A2 (points de contact) et efforts transmissibles, symétriques
par rapport au plan (P)
2121
2121
2121
)12(
),,(
NZ
MY
LX
zyxA
21
21
21
)12(
),,(
N
Y
X
zyxA
(x,y,z)
(21)
A
X21 L21
Y21 M21
Z21 N21
Allure générale (3D) :
Simplification :
Allure simplifiée (2D) :
PFS :
Σ MtA.z =0
Σ F . x = 0
Σ F . y = 0
3 équations scalaires
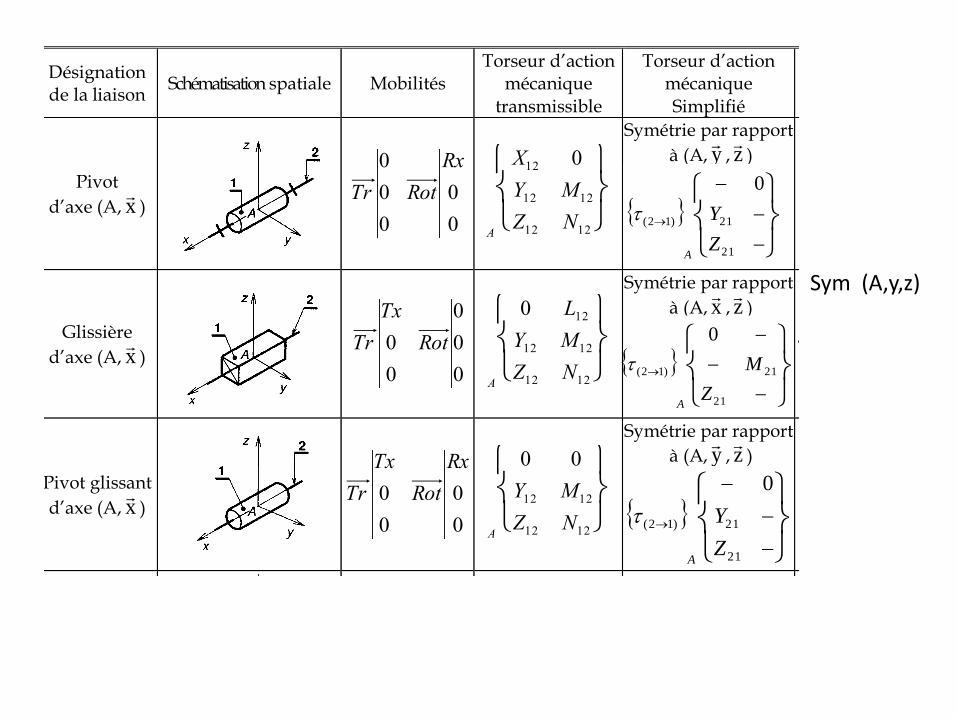
Désignation de la liaison
Schématisation spatiale Mobilités Torseur d’action
mécanique transmissible
Torseur d’action mécanique Simplifié
Schématisation plane
Pivot
d’axe (A, x
)
Tr
0
0
0
Rot
Rx
0
0
A
X12 0
Y12 M12
Z12 N12
Symétrie par rapport
à (A, y
, z
)
A
0 0
Y12 0
Z12 0
1
2
y
z
Glissière
d’axe (A, x
)
Tr
Tx
0
0
Rot
0
0
0
A
0 L12
Y12 M12
Z12 N12
Symétrie par rapport
à (A, x
, z
)
A
0 0
0 M12
Z12 0
x
z
1
2
Pivot glissant
d’axe (A, x
)
Tr
Tx
0
0
Rot
Rx
0
0
A
0 0
Y12 M12
Z12 N12
Symétrie par rapport
à (A, y
, z
)
A
0 0
Y12 0
Z12 0
1
2
y
z
Hélicoïdale
d’axe (A, x
)
Tr
Tx
0
0
Rot
Rx
0
0
1212
1212
1212
NZ
MY
LX
A
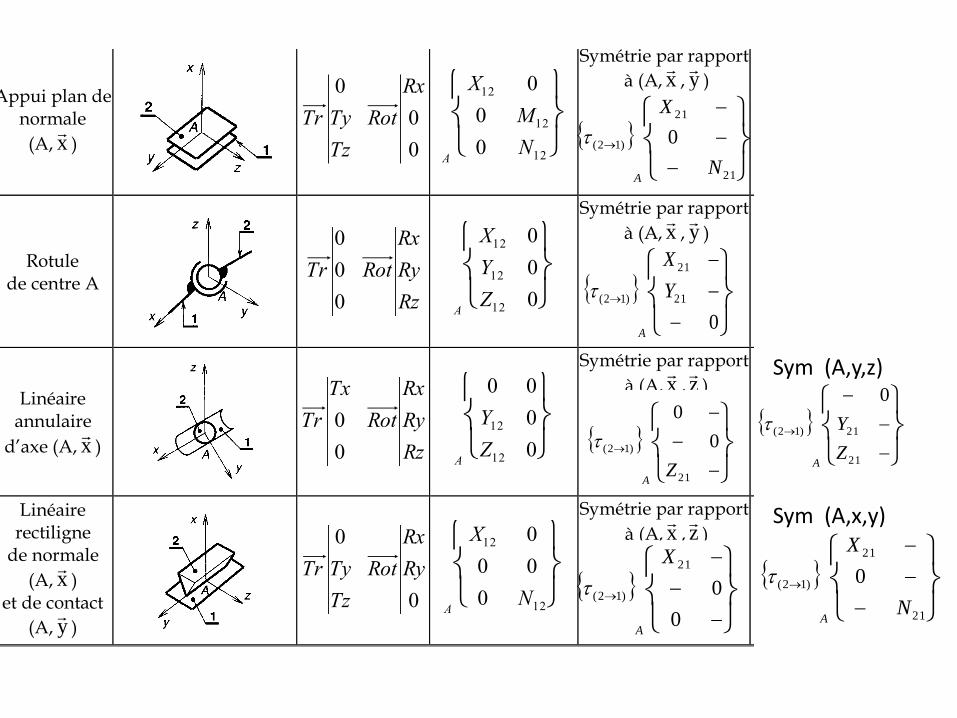
Appui plan de normale
(A, x
)
Tr
0
Ty
Tz
Rot
Rx
0
0
A
X12 0
0 M12
0 N12
Symétrie par rapport
à (A, x
, y
)
A
X12 0
0 0
0 N12
1
2
y
x
Rotule de centre A
Tr
0
0
0
Rot
Rx
Ry
Rz
A
X12 0
Y12 0
Z12 0
Symétrie par rapport
à (A, x
, y
)
A
X12 0
Y12 0
0 0
2
1
y
x
Linéaire annulaire
d’axe (A, x
)
Tr
Tx
0
0
Rot
Rx
Ry
Rz
A
0 0
Y12 0
Z12 0
Symétrie par rapport
à (A, x
, z
)
A
0 0
0 0
Z12 0
x
z2
1
Linéaire rectiligne
de normale
(A, x
) et de contact
(A, y
)
Tr
0
Ty
Tz
Rot
Rx
Ry
0
A
X12 0
0 0
0 N12
Symétrie par rapport
à (A, x
, z
)
A
X12 0
0 0
0 0
z
x
2
1
21
21)12(
0
Z
Y
A
21
21)12(
0
Z
M
A
21
21)12(
0
Z
Y
A
Sym (A,y,z)
Désignation de la liaison
Schématisation spatiale Mobilités Torseur d’action
mécanique transmissible
Torseur d’action mécanique Simplifié
Schématisation plane
Pivot
d’axe (A, x
)
Tr
0
0
0
Rot
Rx
0
0
A
X12 0
Y12 M12
Z12 N12
Symétrie par rapport
à (A, y
, z
)
A
0 0
Y12 0
Z12 0
1
2
y
z
Glissière
d’axe (A, x
)
Tr
Tx
0
0
Rot
0
0
0
A
0 L12
Y12 M12
Z12 N12
Symétrie par rapport
à (A, x
, z
)
A
0 0
0 M12
Z12 0
x
z
1
2
Pivot glissant
d’axe (A, x
)
Tr
Tx
0
0
Rot
Rx
0
0
A
0 0
Y12 M12
Z12 N12
Symétrie par rapport
à (A, y
, z
)
A
0 0
Y12 0
Z12 0
1
2
y
z
Hélicoïdale
d’axe (A, x
)
Tr
Tx
0
0
Rot
Rx
0
0
1212
1212
1212
NZ
MY
LX
A
Appui plan de normale
(A, x
)
Tr
0
Ty
Tz
Rot
Rx
0
0
A
X12 0
0 M12
0 N12
Symétrie par rapport
à (A, x
, y
)
A
X12 0
0 0
0 N12
1
2
y
x
Rotule de centre A
Tr
0
0
0
Rot
Rx
Ry
Rz
A
X12 0
Y12 0
Z12 0
Symétrie par rapport
à (A, x
, y
)
A
X12 0
Y12 0
0 0
2
1
y
x
Linéaire annulaire
d’axe (A, x
)
Tr
Tx
0
0
Rot
Rx
Ry
Rz
A
0 0
Y12 0
Z12 0
Symétrie par rapport
à (A, x
, z
)
A
0 0
0 0
Z12 0
x
z2
1
Linéaire rectiligne
de normale
(A, x
) et de contact
(A, y
)
Tr
0
Ty
Tz
Rot
Rx
Ry
0
A
X12 0
0 0
0 N12
Symétrie par rapport
à (A, x
, z
)
A
X12 0
0 0
0 0
z
x
2
1
21
21
)12( 0
N
X
A
21
)12( 0
0
ZA
0
21
21
)12( Y
X
A
0
0
21
)12(
X
A
Sym (A,x,y)
Sym (A,y,z)
21
21)12(
0
Z
Y
A
21
21
)12( 0
N
X
A
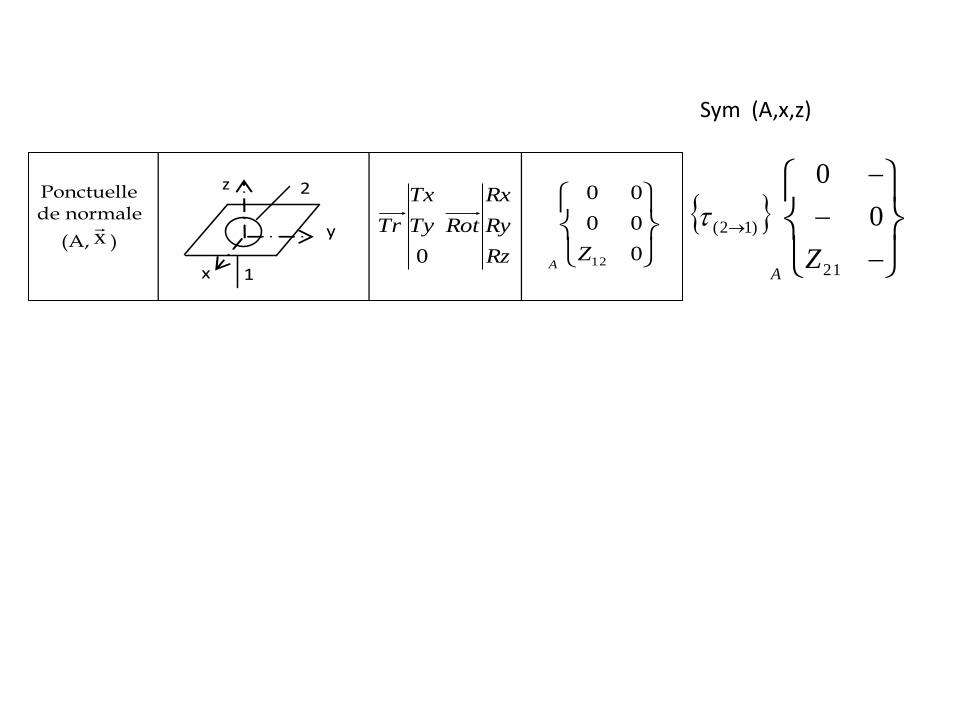
Ponctuelle de normale
(A, x
)
Rz
Ry
Rx
RotTy
Tx
Tr
0
0
00
00
12ZA
Symétrie par rapport
à (A, x
, z
)
0
00
00
12ZA
2
1
x
z 2
1 x
z
y
Sym (A,x,z)
21
)12( 0
0
ZA

0
1
2
3
Pivot Dz
Pivot Cz
Pivot Bz
glissière
F
E
Non isolé
APPLICATION : COMPACTEUR DE CANETTES
E
F = 1000 N
x
y
3
2
1
0
h? Pb dans l’espace? Pb plan?
Modif: définir A au même niveau que B

Équilibre 3 + 2 :
B
Fext
0
0
0
0
0
)3/(
M
B
N
M
Z
Y
X
0
)2/1( 12
12
12
12
12
C
BN
M
L
Z
X
03
03
03
03
03
0)3/0(
A
X03 + X12 = 0
F + Y12 = 0
N03 + 100Y12 – 234X12 +100F = 0
B
Fext
0
0
)3/(
M
B
Y
X
0
)2/1( 12
12
C
BN
X
03
03
0)3/0(
A
Pb plan (x,y):
0
1
2
3
Pivot Dz
Pivot Cz
Pivot Bz
glissière
F
E
Y12 = - F
E
F = 1000 N
x
y
3
2
1
0

0
1
2
3
Pivot Dz
Pivot Cz
Pivot Bz
glissière
F
E Équilibre 1 :
B
Eext
0
0
)1/(
E
B
Y
X
0
)1/2( 12
12
C
B
Y
X
0
)1/0( 01
01
D
Moment en D :
MD R2/1 = MCR 2/1 + R 2/1 CD =
x
x
- 50 Y12
=
-50
0
0
- X12
- Y12
x
MD E = ME E + E ED =
x
x
- 385 E
=
-385
0
0
0
- E
x
Th. Moment en D proj sur z:
- 50 Y12 – 385 E = 0 E = - 50 Y12 / 385 = 50 F / 385
E
F = 1000 N
x
y
3
2
1
0

Si résolution complète :
X01 – X12 = 0
- E + Y01 - Y 12 = 0
- 50 Y12 – 385 E = 0
X03 + X23 = 0
F + Y23 = 0
150 Y23 + N03 + 100 F = 0
X12 - X23 = 0
Y12 - Y23 = 0
-54 Y23 - 234 X23 = 0
Y23 = - F
Y12 = Y23 = - F
E = - 50 Y12 / 385 = 50 F / 385
9 équations pour 9 inconnues
1
2
3
E
F = 1000 N
x
y
3
2
1
0

3. RESOLUTION ANALYTIQUE : CALCUL DES MOMENTS
Le calcul des moments peut se faire de la manière suivante, plus rapide :
Autre méthode :
Mt
A F1
Mt
A F2
Mt
A F1
b
h c
Σ F.x = 0 :
Σ F.y 0 :
Σ MA.z = 0 :
On isole le levier :
θ
F1cosθ
F1sinθ
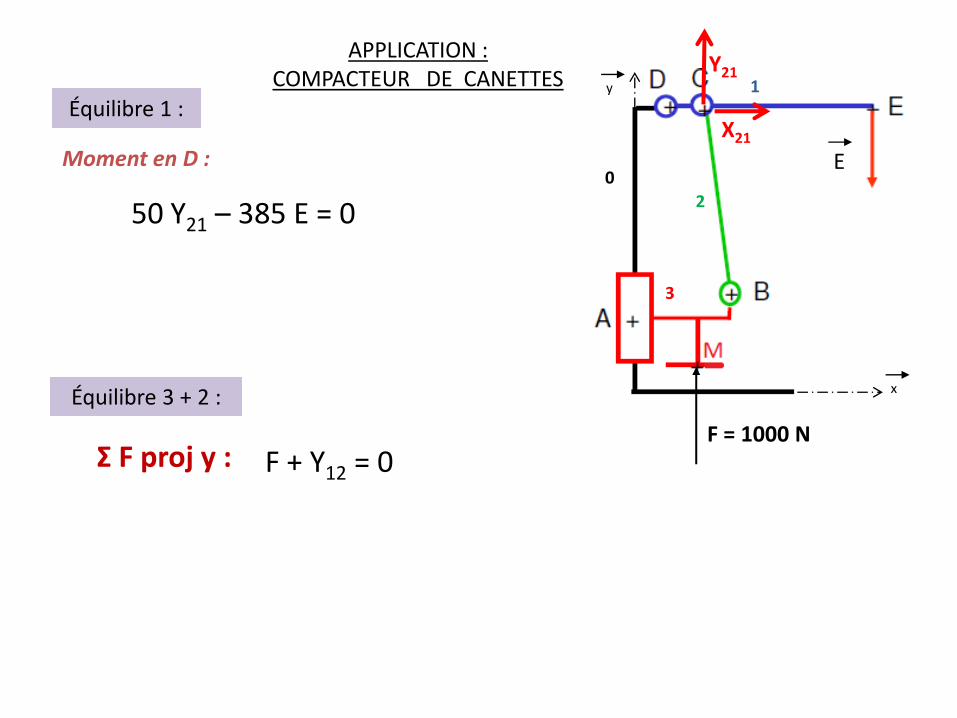
F + Y12 = 0
E
F = 1000 N
x
y
3
2
1
0
Σ F proj y :
Équilibre 3 + 2 :
Équilibre 1 :
APPLICATION : COMPACTEUR DE CANETTES
Moment en D :
50 Y21 – 385 E = 0
X21
Y21
Retour chapitre 1 : 4. Méthode de résolution
Il vous est rarement demandé de déterminer l’ensemble des inconnues force et moment en tout point d’un mécanisme.
La stratégie d’étude qui consiste à isoler chacun des N solides du mécanisme et à décrire systématiquement leur équilibre pour obtenir un système de 6.N équations scalaires à 6N inconnues est donc à éviter car très lourde et sans intérêt.
Vous serez donc évalués sur le choix de votre stratégie de résolution. Quelle(s) inconnues recherchées ?
Quel(s) système(s) isoler ?
Quelle(s) équation(s) écrire ?
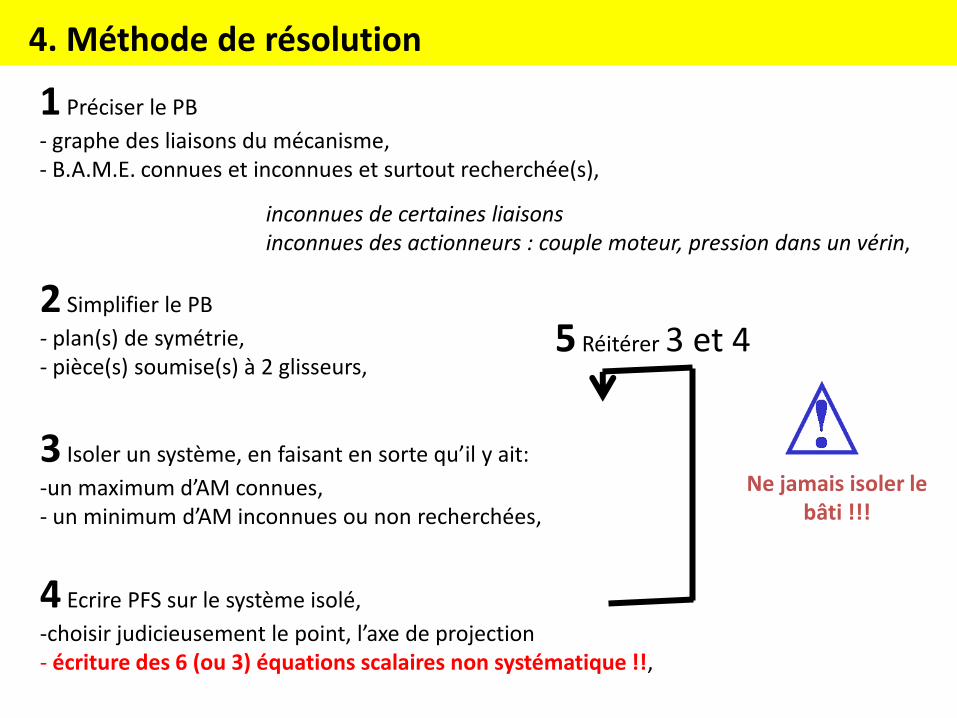
4. Méthode de résolution
1 Préciser le PB
- graphe des liaisons du mécanisme, - B.A.M.E. connues et inconnues et surtout recherchée(s),
inconnues de certaines liaisons inconnues des actionneurs : couple moteur, pression dans un vérin,
2 Simplifier le PB
- plan(s) de symétrie, - pièce(s) soumise(s) à 2 glisseurs,
3 Isoler un système, en faisant en sorte qu’il y ait:
-un maximum d’AM connues, - un minimum d’AM inconnues ou non recherchées,
Ne jamais isoler le bâti !!!
4 Ecrire PFS sur le système isolé,
-choisir judicieusement le point, l’axe de projection - écriture des 6 (ou 3) équations scalaires non systématique !!,
5 Réitérer 3 et 4

x2
POMPE MOYENNE PRESSION : Application
On isole 2:
11
0
0
0
0
0
)2/(
ROCm
mot
1
32
32
0
0
0
0
)2/3(
RE
L
Y
1
12
12
12
12
12
10
)2/1(
RO
M
L
Z
Y
X
M. Laureau
Hypothèse :
Pivot 2/1 de centre O1
Alors (O1,x1,y1) plan de symétrie

On isole 3:
10
0
0
0
0
)3/(
RD
Fhuile
1
23
23
0
0
0
0
)3/2(
RE
L
Y
113
13
13
13
00)3/1(
RDN
L
Z
X
x2