chapitre 3. combinaison linéaire et sev
TRANSCRIPT
Chapitre 3. Combinaison linéaire et SEV
§1. Reconnaitre une combinaison linéaire.
Etant donné deux vecteurs ~v1, ~v2, par exemple
102
et
231
, ainsi
que deux coefficients s et t, il est très facile de calculer leurcombinaison linéaire s~v1 + t~v2. Par exemple
2
102
+ (−1)
231
= (facile...).

Chapitre 3. Combinaison linéaire et SEV
§1. Reconnaitre une combinaison linéaire.
Etant donné deux vecteurs ~v1, ~v2, par exemple
102
et
231
, ainsi
que deux coefficients s et t, il est très facile de calculer leurcombinaison linéaire s~v1 + t~v2. Par exemple
2
102
+ (−1)
231
= (facile...).
Question réciproque : Etant donné un troisième vecteur ~b, par
exemple
897
, est-il une combinaison linéaire de ~v1 et ~v2 ?

Chapitre 3. Combinaison linéaire et SEV
§1. Reconnaitre une combinaison linéaire.
Etant donné deux vecteurs ~v1, ~v2, par exemple
102
et
231
, ainsi
que deux coefficients s et t, il est très facile de calculer leurcombinaison linéaire s~v1 + t~v2. Par exemple
2
102
+ (−1)
231
= (facile...).
Question réciproque : Etant donné un troisième vecteur ~b, par
exemple
897
, est-il une combinaison linéaire de ~v1 et ~v2 ?
Une méthode naïve est de tester avec toutes sortes de coefficientss, t pour tenter de retrouver ~b avec s~v1 + t~v2.
Est-ce la bonne méthode ?
Question réciproque : Etant donné un troisième vecteur ~b, par
exemple
897
, est-il une combinaison linéaire de ~v1 et ~v2 ?
Une méthode naïve est de tester avec toutes sortes de coefficientss, t pour tenter de retrouver ~b avec s~v1 + t~v2.Est-ce la bonne méthode ?
Question réciproque : Etant donné un troisième vecteur ~b, par
exemple
897
, est-il une combinaison linéaire de ~v1 et ~v2 ?
Une méthode naïve est de tester avec toutes sortes de coefficientss, t pour tenter de retrouver ~b avec s~v1 + t~v2.Est-ce la bonne méthode ? NON, il y a trop (une infinité) decoefficients à tester.
La bonne méthode est de : poser des coefficients comme desinconnues, et traduire la question en :
Est-ce que le système x~v1 + y~v2 = ~b admet une solution ?
Dans notre exemple concret, la question devient :
Est-ce que le système x
102
+y
231
=
897
admet une solution ?
Est-ce que le système x
102
+y
231
=
897
admet une solution ?
On est donc ramené à résoudre ce système. On obtientx = 2, y = 3.

Est-ce que le système x
102
+y
231
=
897
admet une solution ?
On est donc ramené à résoudre ce système. On obtientx = 2, y = 3.
Ainsi, la réponse de la question initiale est :
Est-ce que le système x
102
+y
231
=
897
admet une solution ?
On est donc ramené à résoudre ce système. On obtientx = 2, y = 3.
Ainsi, la réponse de la question initiale est :
oui,
897
s’exprime bien en combinaison linéaire de
102
et
231
,
en effet
897
= 2
102
+ 3
231
.
Question similaire : En dimension 4, le vecteur ~e4 est-il unecombinaison linéaire de ~e1, ~e2 et ~e3 ?
Justifier votre réponse.

Est-ce que le système x
102
+y
231
=
897
admet une solution ?
On est donc ramené à résoudre ce système. On obtientx = 2, y = 3.
Ainsi, la réponse de la question initiale est :
oui,
897
s’exprime bien en combinaison linéaire de
102
et
231
,
en effet
897
= 2
102
+ 3
231
.
Question similaire : En dimension 4, le vecteur ~e4 est-il unecombinaison linéaire de ~e1, ~e2 et ~e3 ?
Justifier votre réponse.Non. Car le système x~e1 + y~e2 + z~e3 = ~e4 n’a pas de solution.

§2. Sous espace vectoriel engendré
L’équation x − y − 2z = 0 a pour solution x = y + 2z , où y , z
peuvent prendre n’importe quelles valeurs réelles. Sous formevectorielle, l’ensemble des solutions s’écrit
S ={
y + 2zy
z
, y , z ∈ R
}
={
y
110
+ z
201
, y , z ∈ R
}
={
a
110
+ b
201
, a, b ∈ R
}
(on a remplacé y , z par a, b)
={
toutes les combinaisons linéaires de
110
et
201
}
nouvelle notation= 〈
110
,
201
〉
={
a
110
+ b
201
, a, b ∈ R
}
(on a remplacé y , z par a, b)
={
toutes les combinaisons linéaires de
110
et
201
}
nouvelle notation= 〈
110
,
201
〉
Définition et Notation. On utilise 〈~v1, · · · ,~vm〉 pour désignerl’ensemble de toutes les combinaisons linéaires des ~vi , ou bien, enécriture ensembliste : 〈~v1, · · · ,~vm〉 = {
∑
kak~vk , ak ∈ R} =
{a1~v1 + a2~v2 + · · ·+ am~vm | a1, · · · , am ∈ R}. On appelle cetensemble le sous espace vectoriel engendré (SEV) par lesvecteurs ~v1, · · · ,~vm.
={
a
110
+ b
201
, a, b ∈ R
}
(on a remplacé y , z par a, b)
={
toutes les combinaisons linéaires de
110
et
201
}
nouvelle notation= 〈
110
,
201
〉
Définition et Notation. On utilise 〈~v1, · · · ,~vm〉 pour désignerl’ensemble de toutes les combinaisons linéaires des ~vi , ou bien, enécriture ensembliste : 〈~v1, · · · ,~vm〉 = {
∑
kak~vk , ak ∈ R} =
{a1~v1 + a2~v2 + · · ·+ am~vm | a1, · · · , am ∈ R}. On appelle cetensemble le sous espace vectoriel engendré (SEV) par lesvecteurs ~v1, · · · ,~vm.
Ainsi, demander si ~b est une combinaison linéaire des ~vi revient àdemander si ~b est un élément de l’ensemble 〈~v1, · · · ,~vm〉, revient àdemander si un système (lequel ?) admet une solution (ou plus).

§3. Réduction suivant les colonnes
On peut résoudre un système A~x = ~b en cinq étapes suivantes :
1. On forme la matrice compagnon verticale
(
A
Id
)
.
2. On l’échelonne suivant les colonnes pour obtenir
(
B
H
)
.
Exemple : Résoudre
1 −1 11 0 21 1 3
x
y
z
=
123
.
1 −1 11 0 21 1 3
1 0 00 1 00 0 1
C2 C2+C1
−→
C3 C3−C1
1© 0 01 11 2
1 1 −10 1 00 0 1
C3 C3−C2
−→
1© 0 01 1© 01 2 0
1 1 −20 1 −10 0 1
Alors B =??, H =??, ~b =??

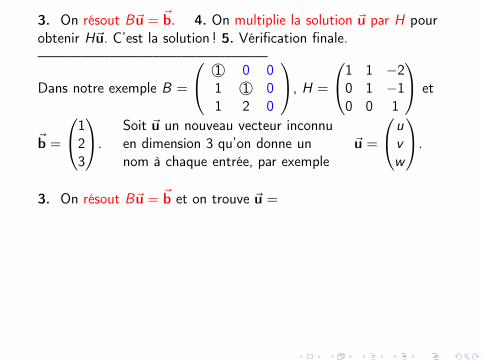
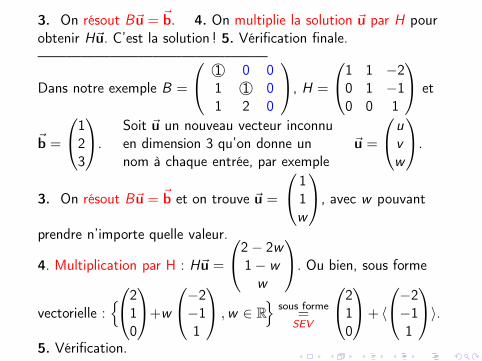
3. On résout B~u = ~b. 4. On multiplie la solution ~u par H pourobtenir H~u. C’est la solution ! 5. Vérification finale.————————————————
Dans notre exemple B =
1© 0 01 1© 01 2 0
, H =
1 1 −20 1 −10 0 1
et
~b =
123
.

3. On résout B~u = ~b. 4. On multiplie la solution ~u par H pourobtenir H~u. C’est la solution ! 5. Vérification finale.————————————————
Dans notre exemple B =
1© 0 01 1© 01 2 0
, H =
1 1 −20 1 −10 0 1
et
~b =
123
.Soit ~u un nouveau vecteur inconnuen dimension 3 qu’on donne unnom à chaque entrée, par exemple
~u =
u
v
w
.
3. On résout B~u = ~b. 4. On multiplie la solution ~u par H pourobtenir H~u. C’est la solution ! 5. Vérification finale.————————————————
Dans notre exemple B =
1© 0 01 1© 01 2 0
, H =
1 1 −20 1 −10 0 1
et
~b =
123
.Soit ~u un nouveau vecteur inconnuen dimension 3 qu’on donne unnom à chaque entrée, par exemple
~u =
u
v
w
.
3. On résout B~u = ~b et on trouve ~u =
3. On résout B~u = ~b. 4. On multiplie la solution ~u par H pourobtenir H~u. C’est la solution ! 5. Vérification finale.————————————————
Dans notre exemple B =
1© 0 01 1© 01 2 0
, H =
1 1 −20 1 −10 0 1
et
~b =
123
.Soit ~u un nouveau vecteur inconnuen dimension 3 qu’on donne unnom à chaque entrée, par exemple
~u =
u
v
w
.
3. On résout B~u = ~b et on trouve ~u =
11w
, avec w pouvant
prendre n’importe quelle valeur.
4. Multiplication par H : H~u =
2 − 2w1 − w
w
. Ou bien, sous forme
vectorielle :{
210
+w
−2−11
,w ∈ R
}
sous forme=
SEV
210
+ 〈
−2−11
〉.
5. Vérification.

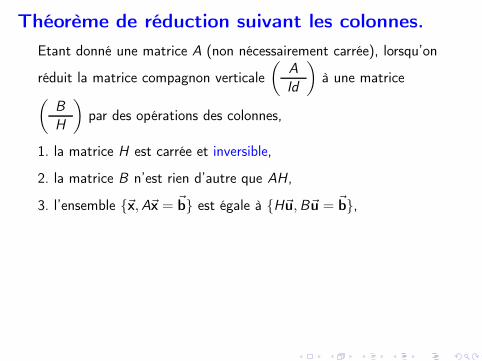
Théorème de réduction suivant les colonnes.
Etant donné une matrice A (non nécessairement carrée), lorsqu’on
réduit la matrice compagnon verticale
(
A
Id
)
à une matrice(
B
H
)
par des opérations des colonnes,
1. la matrice H est carrée et inversible,

Théorème de réduction suivant les colonnes.
Etant donné une matrice A (non nécessairement carrée), lorsqu’on
réduit la matrice compagnon verticale
(
A
Id
)
à une matrice(
B
H
)
par des opérations des colonnes,
1. la matrice H est carrée et inversible,
2. la matrice B n’est rien d’autre que AH,
Théorème de réduction suivant les colonnes.
Etant donné une matrice A (non nécessairement carrée), lorsqu’on
réduit la matrice compagnon verticale
(
A
Id
)
à une matrice(
B
H
)
par des opérations des colonnes,
1. la matrice H est carrée et inversible,
2. la matrice B n’est rien d’autre que AH,
3. l’ensemble {~x,A~x = ~b} est égale à {H~u,B~u = ~b},
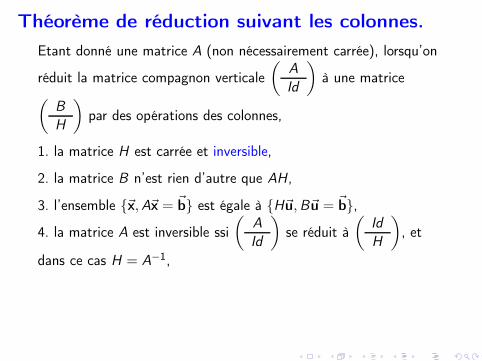
Théorème de réduction suivant les colonnes.
Etant donné une matrice A (non nécessairement carrée), lorsqu’on
réduit la matrice compagnon verticale
(
A
Id
)
à une matrice(
B
H
)
par des opérations des colonnes,
1. la matrice H est carrée et inversible,
2. la matrice B n’est rien d’autre que AH,
3. l’ensemble {~x,A~x = ~b} est égale à {H~u,B~u = ~b},
4. la matrice A est inversible ssi
(
A
Id
)
se réduit à
(
Id
H
)
, et
dans ce cas H = A−1,
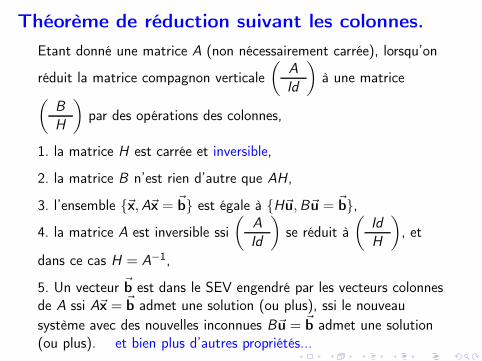
Théorème de réduction suivant les colonnes.
Etant donné une matrice A (non nécessairement carrée), lorsqu’on
réduit la matrice compagnon verticale
(
A
Id
)
à une matrice(
B
H
)
par des opérations des colonnes,
1. la matrice H est carrée et inversible,
2. la matrice B n’est rien d’autre que AH,
3. l’ensemble {~x,A~x = ~b} est égale à {H~u,B~u = ~b},
4. la matrice A est inversible ssi
(
A
Id
)
se réduit à
(
Id
H
)
, et
dans ce cas H = A−1,
5. Un vecteur ~b est dans le SEV engendré par les vecteurs colonnesde A ssi A~x = ~b admet une solution (ou plus), ssi le nouveau
système avec des nouvelles inconnues B~u = ~b admet une solution(ou plus). et bien plus d’autres propriétés...

Preuve du théorème
Chaque opération élémentaire suivant les colonnes correspond àmultiplier la matrice à droite par une matrice (dite élémentaire) E
qui est inversible. Ainsi la suite de réduction se lit(
A
Id
)
(
AE1
E1
)
(
AE1E2
E1E2
)
· · · (
AE1E2 · · ·Em
E1E2 · · ·Em
)
=
(
AH
H
)
.
Ceci montre que si
(
A
Id
)
se réduit à
(
B
H
)
, alors B = AH et H
est toujours inversible.
De plus, si B = id alors AH = Id , donc H = A−1, etB~u = ~b ⇒ (AH)~u = ~b ⇒ A(H~u) = ~b ⇒ H~u est solution de
A~x = ~b.
Réciproquement, si ~x est une solution de A~x = ~b, alors, parl’invisibilité de H, on peut former ~u = H−1~x. AinsiB~u = B(H−1~x) = AHH−1~x = A~x = ~b.

Interprétation géométrique et applications