ce manuel de cours et d’exercices d’asservissement et de
TRANSCRIPT


Ce manuel de cours et d’exercices d’Asservissement et de Régulation est un outil
permettant aux étudiants de suivre, comprendre et d’assimiler ce cours. En s’appuyant
sur la résolution des exercices, d’une façon méthodiques et pédagogiques, accompagnés
par une simulation de certains exercices, en utilisant le logiciel ‘’Matlab’’.
Il s’adresse en premier lieu aux étudiants du réseau ISET, à ceux qui désirent améliorer
leur connaissance dans cette matière. Il s’adresse également aux élèves ingénieurs.
Ce manuel comporte cinq chapitres, le premier chapitre est consacré à l’étude et l’utilité
de la transformée de Laplace, le deuxième chapitre traitant la modélisation d’un
système linéaire par une fonction de transfert, le troisième chapitre traite l’étude et
l’analyse temporelle et fréquentielle d’un système linéaire asservi, le quatrième chapitre
donne un aperçu sur les systèmes linéaires bouclés, le cinquième chapitre donne un
aperçu sur les différents techniques utilisés pour l’étude de la stabilité d’un système
linéaire continu. Enfin, il est terminé par des exercices avec éléments de correction de
chaque chapitre.
Auteur: SOYED Abdessamï

Sommaire
i
CHAPITRE 1: TRANSFORMEE DE LAPLACE DES FONCTIONS CAUSALES _____________ 7
1. FONCTIONS CAUSALES _____________________________________________________________ 8
2. FONCTIONS CAUSALES ELEMENTAIRES_______________________________________________ 8
2.1. Impulsion de Dirac unitaire _________________________________________________________ 8
2.2. Echelon unité ____________________________________________________________________ 8
2.3. Rampe unitaire ___________________________________________________________________ 9
3. FONCTIONS CAUSALES RETARDEES__________________________________________________ 9
4. AUTRES FONCTIONS USUELLES ____________________________________________________ 10
4.1. Fonction créneau (porte)___________________________________________________________ 10
4.2. Fonction triangulaire _____________________________________________________________ 10
4.3. Fonction sinusoïdale causale _______________________________________________________ 11
5. TRANSFORMEE DE LAPLACE D’UNE FONCTION CAUSALE_______________________________ 11
5.1. Propriétés de la transformée de Laplace_______________________________________________ 11
5.2. Transformée de Laplace d'une fonction périodique causale________________________________ 13
6. PRODUIT DE CONVOLUTION DES FONCTIONS CAUSALES_______________________________ 14
6.1. Propriétés du Produit de Convolution ________________________________________________ 14
6.2. Transformée de Laplace du produit de Convolution _____________________________________ 14
6.3. Transformée de Laplace d’intégrale d’une fonction causale _______________________________ 14
7. TRANSFORMEE DE LAPLACE INVERSE D’UNE FONCTION CAUSALE ______________________ 15
7.1 Propriétés de la transformée de Laplace Inverse ________________________________________ 15
8. TABLE DU TRANSFORMEE DE LAPLACE ET LAPLACE INVERSE __________________________ 16
9. RESOLUTION DES EQUATIONS DIFFERENTIELLES PAR LA METHODE DE (TL) ______________ 17
9.1. Equation du premier ordre à cœfficients constants_______________________________________ 17
9.2. Fonction de transfert______________________________________________________________ 17

Sommaire
ii
9.3. Solution ou réponse à une entrée ____________________________________________________ 17
9.4. Equation de deuxième ordre à cœfficients constants _____________________________________ 17
9.5. Equation différentielle d’ordre (n) à cœfficients constants_________________________________ 18
EXERCICES SUR LA TRANSFORMEE DE LAPLACE _________________________________ 19
EXERCICES SUR LE PRODUIT DE CONVOLUTION __________________________________ 21
EXERCICES SUR LA TRANSFORMEE DE LAPLACE INVERSE ________________________ 22
EXERCICES SUR LES EQUATIONS DIFFERENTIELLES ______________________________ 24
CHAPITRE 2: MODELISATION D’UN SYSTEME LINEAIRE CONTINU INVARIANT_____ 25
1. DIFFERENTS TYPES DE SYSTEMES INDUSTRIELS _____________________________________ 26
2. MODELISATION DES SYSTEMES LINAIRES CONTINUS INVARIANTS _______________________ 27
2.1. Modèle de connaissance___________________________________________________________ 27
2.2. Modèle de comportement__________________________________________________________ 27
3. MODELISATION D’UN SYSTEME LCI __________________________________________________ 27
4. REPONSES PARTICULIERES (SIGNAUX TESTS) ________________________________________ 28
2.1. Réponse Impulsionnelle ___________________________________________________________ 28
2.2. Réponse Indicielle _______________________________________________________________ 28
2.3. Réponse harmonique _____________________________________________________________ 28
5. POLES ET ZEROS D’UNE FONCTION DE TRANSFERT ___________________________________ 29
6. ASSERVISSEMENT ET REGULATION D’UN SYSTEME LINEAIRE ___________________________ 29
7. EXEMPLE DE MODELISATION DES PROCESSUS INDUSTRIELS ___________________________ 30
7.1. Système mécanique ______________________________________________________________ 30
7.2. Système électrique _______________________________________________________________ 30

Sommaire
iii
CHAPITRE 3: ANALYSE TEMPORELLE ET FREQUENTIELLE D’UN SLC ______________ 31
1. ETUDE D’UN SYSTEME LINEAIRE CONTINU (SLC) DE PREMIER ORDRE____________________ 32
1.1. Analyse temporelle_______________________________________________________________ 33
1.2. Analyse harmonique______________________________________________________________ 35
2. ETUDE DU SYSTEME LINEAIRE CONTINU (SLC) DE DEUXIEME ORDRE ____________________ 39
2.1. Solutions de l’équation du système du 2eme ordre________________________________________ 41
2.2. Etude de la réponse temporelle d’un système 2eme ordre__________________________________ 42
2.3. Analyse harmonique d’un système de deuxième ordre ___________________________________ 50
CHAPITRE 4: LES SYSTEMES LINEAIRES CONTINUS BOUCLES _____________________ 55
1. INTRODUCTION ___________________________________________________________________ 56
2. SCHEMA FONCTIONNEL D’UN SYSTEME LINEAIRE CONTINU ASSERVI ____________________ 56
3. FONCTION DE TRANSFERT D’UN SYSTEME LINEAIRE CONTINU EN BOUCLE FERMEE _______ 56
CHAPITRE 5: STABILITE DES SYSTEMES LINEAIRES CONTINUS (SLC) ______________ 59
1. CONDITIONS DE STABILITE _________________________________________________________ 60
1.1. Domaine temporel ________________________________________________________________ 60
1.2. Domaine fréquentiel ______________________________________________________________ 60
2. CRITERE DE STABILITE ALGEBRIQUE DE ROUTH ______________________________________ 60
3. CRITERE DE STABILITE GRAPHIQUES ________________________________________________ 61
3.1. Critère de Bode__________________________________________________________________ 61
3.2. Critère de Nyquist _______________________________________________________________ 61
ELEMENTS DE SOLUTIONS________________________________________________________ 69
SIGNAUX USUELS : ________________________________________________________________ 79
BIBLIOGRAPHIE _________________________________________________________________ 80
Chapitre ❶
Asservissement & Régulation Page: 7 Propose par: SOYED-Abdessamï
Chapitre 1: Transformée de Laplace des fonctions causales
Chapitre ❶
Asservissement & Régulation Page: 8 Propose par: SOYED-Abdessamï
La transformée de Laplace est considérée comme étant un outil mathématique puissant, elle
permet de remplacer les opérateurs analytiques de dérivation et d'intégration par des opérateurs
algébriques. Elle facilite la résolution des équations différentielles.
1. Fonctions causales Une fonction de la variable réelle ( t ) est dite causale, si pour tout ( t<0 ). On a f(t)=0 .
2. Fonctions causales élémentaires
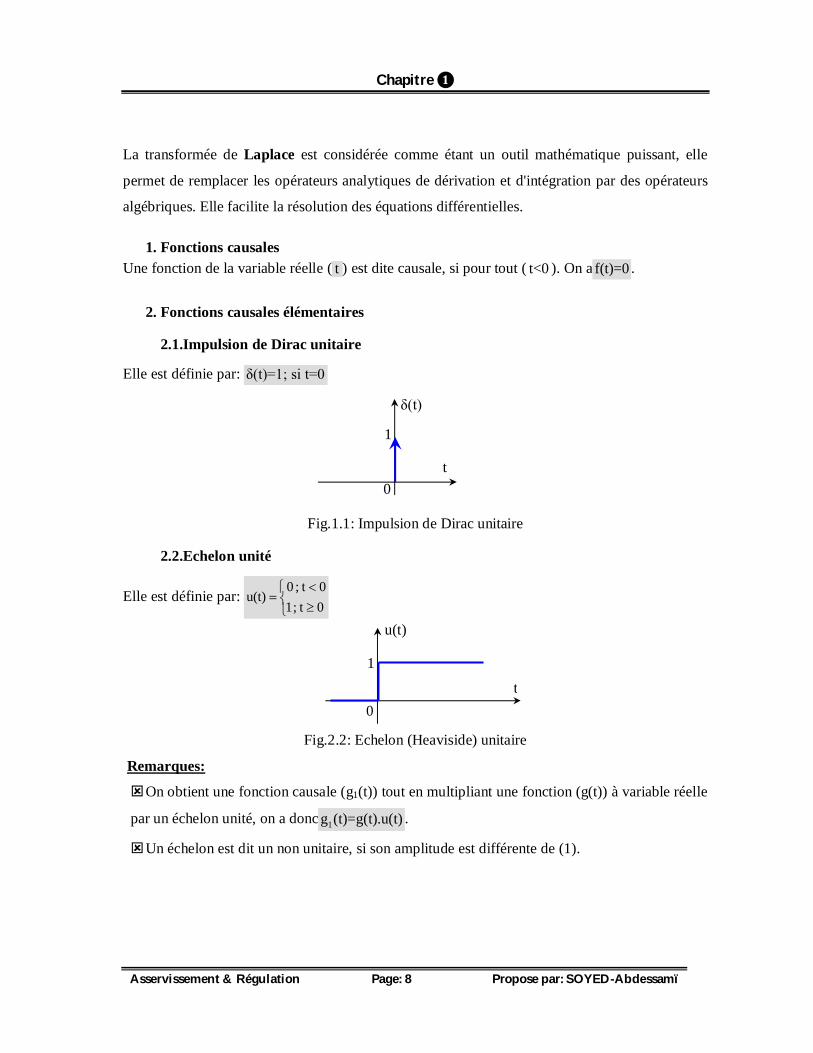
2.1.Impulsion de Dirac unitaire
Elle est définie par: δ(t)=1; si t=0
Fig.1.1: Impulsion de Dirac unitaire
2.2.Echelon unité
Elle est définie par:
0 t; 10 t; 0
u(t)
Fig.2.2: Echelon (Heaviside) unitaire
Remarques:
On obtient une fonction causale (g1(t)) tout en multipliant une fonction (g(t)) à variable réelle
par un échelon unité, on a donc 1g (t)=g(t).u(t) .
Un échelon est dit un non unitaire, si son amplitude est différente de (1).
t0
u(t)
1
t0
δ(t)
1
Chapitre ❶
Asservissement & Régulation Page: 9 Propose par: SOYED-Abdessamï
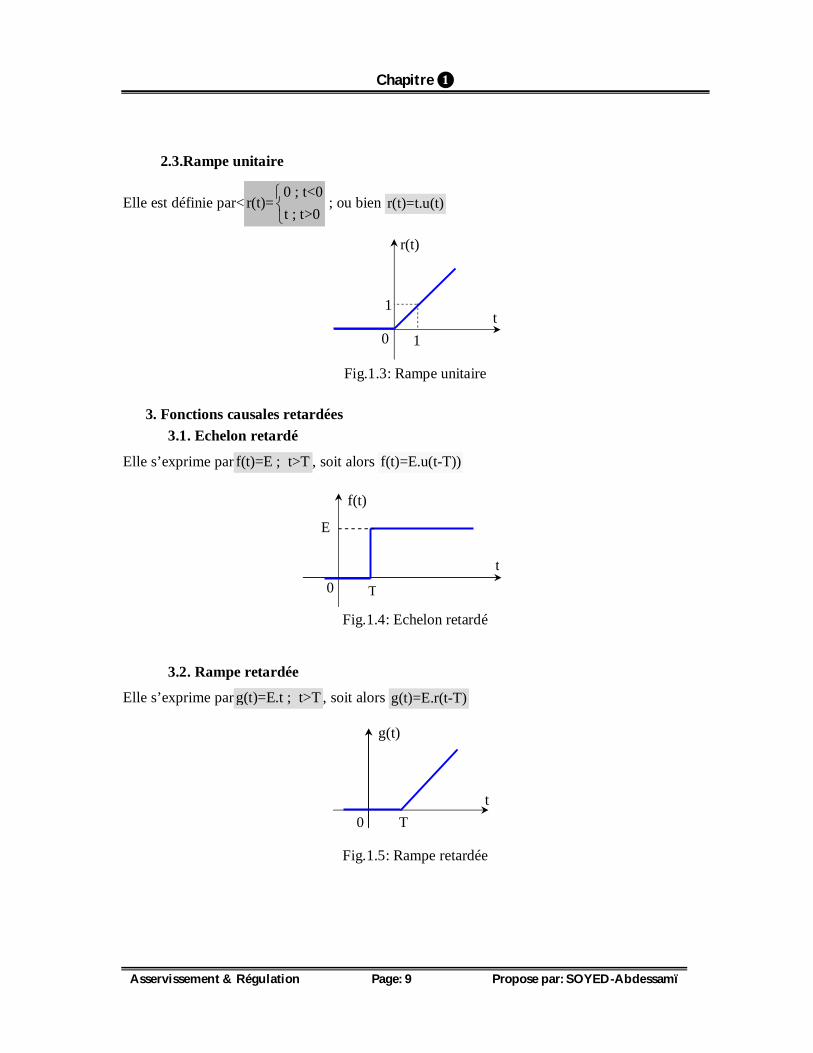
2.3.Rampe unitaire
Elle est définie par<0 ; t<0
r(t)=t ; t>0
; ou bien r(t)=t.u(t)
Fig.1.3: Rampe unitaire
3. Fonctions causales retardées 3.1. Echelon retardé
Elle s’exprime par f(t)=E ; t>T , soit alors f(t)=E.u(t-T))
Fig.1.4: Echelon retardé
3.2. Rampe retardée
Elle s’exprime par g(t)=E.t ; t>T , soit alors g(t)=E.r(t-T)
Fig.1.5: Rampe retardée
g(t)
tT0
r(t)
t1
1
0
t0
f(t)
E
T
Chapitre ❶
Asservissement & Régulation Page: 10 Propose par: SOYED-Abdessamï
4. Autres fonctions usuelles
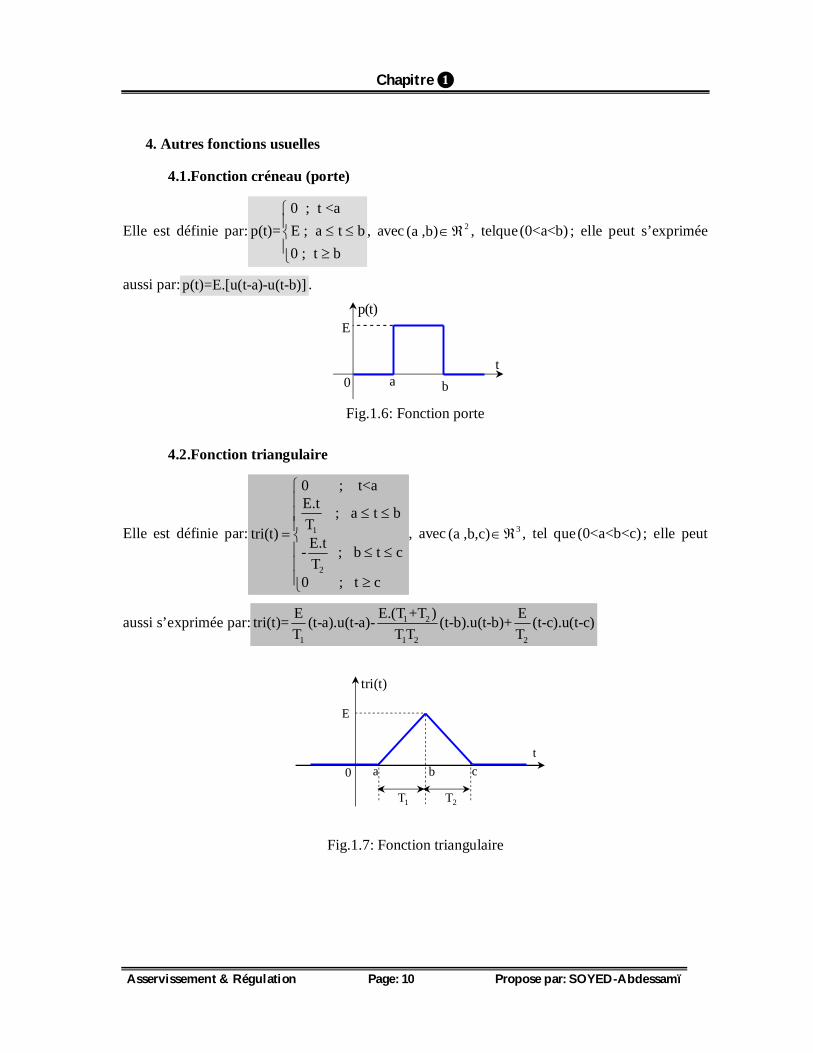
4.1.Fonction créneau (porte)
Elle est définie par:0 ; t <a
p(t)= E ; a t b0 ; t b
, avec 2(a ,b) , telque (0<a<b) ; elle peut s’exprimée
aussi par: p(t)=E.[u(t-a)-u(t-b)] .
Fig.1.6: Fonction porte
4.2.Fonction triangulaire
Elle est définie par: 1
2
0 ; t<aE.t ; a t bTtri(t) E.t- ; b t c T
0 ; t c
, avec 3(a ,b,c) , tel que (0<a<b<c) ; elle peut
aussi s’exprimée par: 1 2
1 1 2 2
E.(T +T )E Etri(t)= (t-a).u(t-a)- (t-b).u(t-b)+ (t-c).u(t-c)T T T T
Fig.1.7: Fonction triangulaire
t0
E
a b
p(t)
t0
E
a b c
1T 2T
tri(t)

Chapitre ❶
Asservissement & Régulation Page: 11 Propose par: SOYED-Abdessamï
4.3.Fonction sinusoïdale causale
La fonction sinusoïdale causale est définie par: mv(t)=V .sin(t) ; t 0 ou bien mv(t)=V .sin(t).u(t) .
0 0.005 0.01 0.015 0.02 0.025 0.03-400
-300
-200
-100
0
100
200
300
400
v(t)
Temps(s)
v(t)=Vm*sin(wt)
TT/2
Fig.1.8: Fonction sinusoïdale
5. Transformée de Laplace d’une fonction causale La transformée de Laplace d’une fonction causale ( f(t) ) à variable réelle, est définie par:
+
-pt
0
F(p)=L f(t) = f(t).e dt
. Avec 2p=σ+jw ; (σ,w) ; p: Opérateur de Laplace
5.1.Propriétés de la transformée de Laplace
Linéarité: 1 2 1 2L[αf (t)+βf (t)]=αF (p)+βF (p) , avec 2β) ,( .
Théorème de retard: -pTL[f(t-T)]=e F(p) , avec +T .
Théorème de décalage fréquentiel: 0-p.w .t0L[e .f(t)]=F(p+w ) .
Théorème de facteur d’échelle: 1 pL f(nt) = F( )n n
; Zn .

Chapitre ❶
Asservissement & Régulation Page: 12 Propose par: SOYED-Abdessamï
Théorème de la dérivation:
+df(t)L[ ]=pF(p)-f(0 )dt
, (dérivée première)
2
2 + +2
d f(t) dfL[ ]=p F(p)-pf(0 )- (0 )dt dt
, (dérivée seconde).
n n-k-1 +n-1
n kn n-k-1
k=0
d f(t) d f(0 )L[ ]=p F(p)- pdt dt , (dérivée d’ordre n).
Théorème d’intégration:
+
0
F(p)+f(0 )L f(t)dt =p
Théorème de la valeur initiale:
On suppose que la fonction f(t) est dérivable et possède une transformée de Laplace. On admet
que+ +-pt -pt
0 0p + p +
df(t) df(t)lim ( e dt= lim ( e dtdt dt
.Sachant que +df(t)L[ ]=pF(p)-f(0 )dt
et -pt
p
dflim e =0dt
.
On obtient alors donc : +
p +lim pF(p) =f(0 )
.
Théorème de la valeur finale:
On suppose que la fonction f(t) est dérivable et possède une transformée de Laplace. Sachant
que: -pt -pt
0 0p 0 p 0
df(t) df(t)lim[ e dt]= lim[ e ]dtdt dt
et -pt
p 0
df(t) df(t)lim e =dt dt
. On obtient alors:
+-pt +00p 0 t +
df(t)lim[ e dt]= f(t) = lim [f(t)-f(0 )]dt
, en plus on a +df(t)L[ ]=pF(p)-f(0 )dt
.Si les limites
sont finies, on obtient alors donc: p 0 t +lim pF(p) = lim f(t)
.

Chapitre ❶
Asservissement & Régulation Page: 13 Propose par: SOYED-Abdessamï
5.2.Transformée de Laplace d'une fonction périodique causale
La fonction causale suivante ( (t)f1 ) admet une transformée de Laplace ( (p)F1 ).
Fig.1.9: Fonction « (t)f1 »
La fonction f(t) est périodique et causale, définie par:+
1 2 n kk=1
f(t)=f (t)+f (t)+......+f (t).+...= f (t)
.
Fig.1.10: Fonction périodique causale
La fonction f(t) est une sommation de (t)f1 avec un décalage temporel régulier répétitif (T). Elle
peut s’écrire par: n 1n=1 n=1
f(t)= f (t)= f (t-nT)u(t-nT)
, sa transformée de Laplace est fournie par:
1n
n=1
F (p)L f(t) = f (t)= -pT1-e
T0
(t)f1
t
t0
f(t)
T 2T 3T

Chapitre ❶
Asservissement & Régulation Page: 14 Propose par: SOYED-Abdessamï
6. Produit de Convolution des fonctions Causales Le produit de convolution traduit, le balayage d’une fonction sur une autre, il représente la
mesure des fonctions. Il s’applique sur des fonctions temporelles ou des fonctions fréquentielles.
Le produit de convolution de deux fonctions temporelles (f et g) est une fonction temporelle (h).
Il est définit par:0
h(t)=(f*g)(t)= f(τ).g(t-τ)dτ
.
6.1.Propriétés du Produit de Convolution
Le produit de convolution est linéaire, commutatif, associatif et distributif par l’addition.
Il possède aussi d’autres propriétés.
Commutativité: f(t)*g(t)=g(t)*f(t) .
Associativité: f(t)* g(t)+h(t) = f(t)*g(t) *h(t) .
Linéarité: αf(t)+βg(t) *h(t)=α f(t)*h(t) +β g(t)*h(t) ; (α,β)
Décalage Temporel: 1 2 1 2f(t-τ )*g(t-τ )=h(t-τ -τ ) .
Dérivation: d d dh(t)= f(t)*g(t) =[ f(t)]*g(t)=f(t)*[ g(t)]dt dt dt
.
6.2.Transformée de Laplace du produit de Convolution
Le produit de convolution de deux fonctions temporelles se traduit par un produit simple dans le
plan de Laplace, en effet on a h(t)=f(t)*g(t) , on obtient alors donc:
L f(t)*g(t) =L f(t) L g(t) =F(p).G(p)=H(p)
6.3.Transformée de Laplace d’intégrale d’une fonction causale
On considère une fonction réelle f(t) à variable réelle (t). Le produit de convolution de cette
fonction par un échelon unité est définit par:t t
0 0(u*f)(t)= f(τ).u(t-τ)dτ= f(τ)dτ . On obtient alors:
t
0
1L f(τ)dτ =F(p).P

Chapitre ❶
Asservissement & Régulation Page: 15 Propose par: SOYED-Abdessamï
7. Transformée de Laplace inverse d’une fonction causale Pour trouver la fonction originale dune fonction temporelle, connaissant sa transformé de
Laplace F(p) .On applique la définition inverse +
-1 pt
-
1f(t)=L F(p) = F(p)e dp2πj
, ou bien on utilise
la méthode de Résidu (décomposition en élément simple de f(t)).
7.1 Propriétés de la transformée de Laplace Inverse
Linéarité: -11 2 1 2L [αF (p)+βF (p)]=αf (t)+βf (t) , avec 2(α;β) .
Théorème de retard: -1 -pTL [e F(p)]=f(t-T) , avec +T .
Théorème de décalage fréquentiel: 0-p.w .t-10L F(p+w )=e .f(t) .
Théorème de facteur d’échelle: -1 pL [F( )]=n.f(nt)n
; Zn .
Théorème d’intégration: +-1
p
f(t)L [ F(x)dx]=t
Théorème de dérivation: -1 F(p)F'(p)=L [ ]=-t.f(t)dp
Chapitre ❶
Asservissement & Régulation Page: 16 Propose par: SOYED-Abdessamï
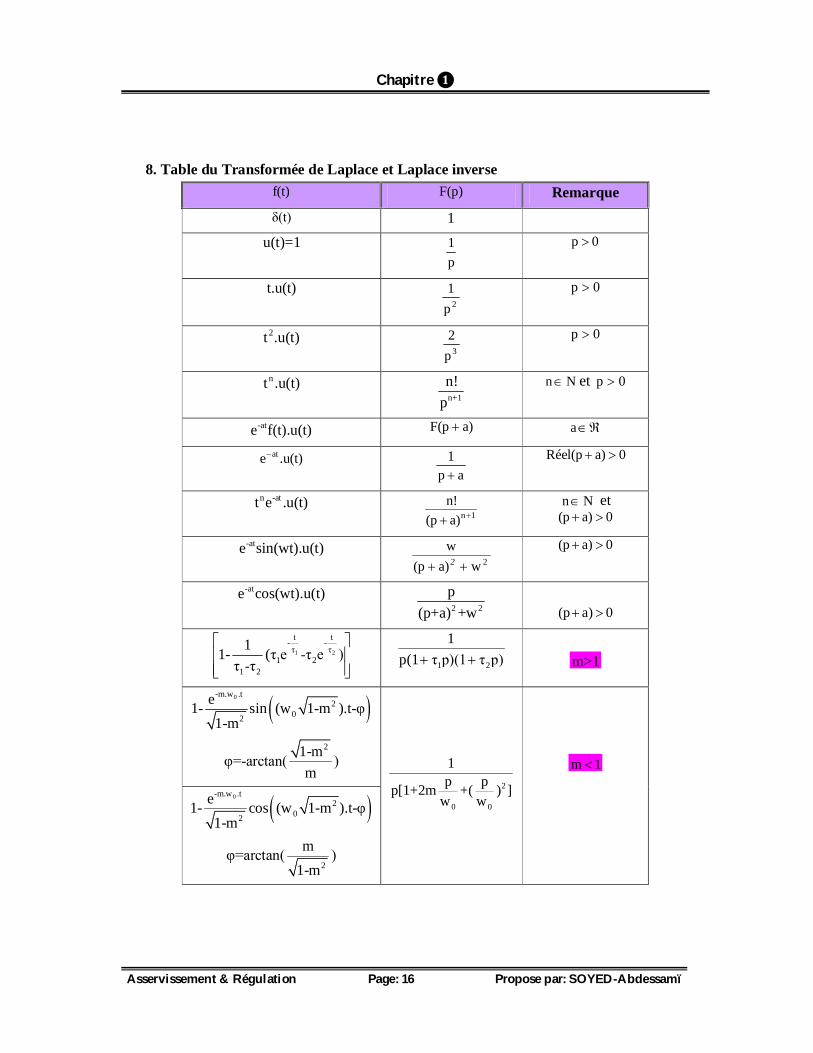
8. Table du Transformée de Laplace et Laplace inverse f(t) F(p) Remarque δ(t) 1
u(t)=1 p1 0p
t.u(t) 2p
1 0p
2t .u(t) 3p
2 0p
nt .u(t) n+1
n!p
Nn et 0p
-ate f(t).u(t) a)F(p a
.u(t)e at ap
1
0a)Réel(p
n -att e .u(t) 1na)(p
n!
Nn et 0a)(p
-ate sin(wt).u(t) 2wa)(p
w 2 0a)(p
-ate cos(wt).u(t) 2 2
p(p+a) +w
0a)(p
1 2
t t- -τ τ
1 21 2
11- (τ e -τ e )τ -τ
1 2
1p(1 τ p)(1 τ p)
m>1
0-m.w .t2
02
e1- sin (w 1-m ).t-φ1-m
21-mφ=-arctan( )m
0-m.w .t2
02
e1- cos (w 1-m ).t-φ1-m
2
mφ=arctan( )1-m
2
0 0
1p pp[1+2m +( ) ]
w w
1m

Chapitre ❶
Asservissement & Régulation Page: 17 Propose par: SOYED-Abdessamï
9. Résolution des équations différentielles par la méthode de (TL) 9.1.Equation du premier ordre à cœfficients constants
Soit l’équation différentielle suivante dy +ay=ke(t)dt
, ou y (t): sortie et e (t): entrée. On suppose de
plus que la condition initiale n’est pas nulle, c’est à dire y(0+)=y0. Pour résoudre cette équation, il
suffit de la transformer dans le domaine de Laplace, on obtient alors 0kE(p)+yY(p)=p+a
.
9.2.Fonction de transfert
On appelle fonction de transfert (transmittance), le rapport Y(p) kH(p)= =E(p) p+a
, avec la condition
initiale nulle.
9.3.Solution ou réponse à une entrée
La solution générale est donnée par -1y(t)=L [Y(p)] .
Réponse Impulsionnelle:
L’entrée est une impulsion nuitée e(t)=δ(t) , la solution est fournie par -at0
ky(t)=[ +y ]ea
.
Réponse Indicielle:
L’entrée est un échelon unité e(t)=u(t) , la solution est fournie par -a.t -a.t0
ky(t)= (1-e )+y ea
.
9.4.Equation de deuxième ordre à cœfficients constants
L’équation différentielle de 2éme ordre est décrit par2
2
d y dya +b +cy=ke(t)dt dt
, avec y(t):sortie et
e(t):entrée. Les conditions initiales ne sont pas nulles et valent: +0y(0 )=y et + +
0dyy'(0 )= (0 )=y'dt
.
La transformée de Laplace de l’équation précédente est fournie par: 2
2
d y dyL[a +b +cy]=L[ke(t)]dt dt
, soit 0 02
kE(p)+y (ap+b)+y'Y(p)=ap +bp+a
.

Chapitre ❶
Asservissement & Régulation Page: 18 Propose par: SOYED-Abdessamï
9.5.Equation différentielle d’ordre (n) à cœfficients constants
Soit un système industriel schématisé par la figure ci-dessous, il est modélisé par une équation
différentielle donnée par: n m
n 1 0 0 1 mn m
d s t ds t d e tde(t)a +...+a +a s(t)=b e t +b +...+bdt dt dt dt
.
Fig.1.11: Schéma d’un processus industriel
La transformé de Laplace du système est fournie par:
m m-1m m-1 1 0
n n-1n n-1 1 0
S p b p +b p +...+b p+bG(p)= =E p a p +a p +...+a p+a
Fig.1.12: Schéma fonctionnel d’un processus industriel
E(p) S(p)G(p)
e(t) s(t)Système
Chapitre ❶
Asservissement & Régulation Page: 19 Propose par: SOYED-Abdessamï
Exercices sur la Transformée de Laplace
Exercice 1:
Trouver les fonctions de transfert, des fonctions temporelles suivantes:
a) 2 -2t1f(t)=(1- t -e ).u(t)2
,
b) -2t1g (t)=e cos(3t).u(t) ; -2t
2g (t)=e sin(3t).u(t) ,
c) 2 -3t1h (t)=(1-t+t )e .u(t) ; -2t 2
2h (t)=e (1-t) .u(t) ,
d) x(t)= (t+2).u(t)+(t+2).u(t-1) ,
e) 2-a.ty(t)=e .
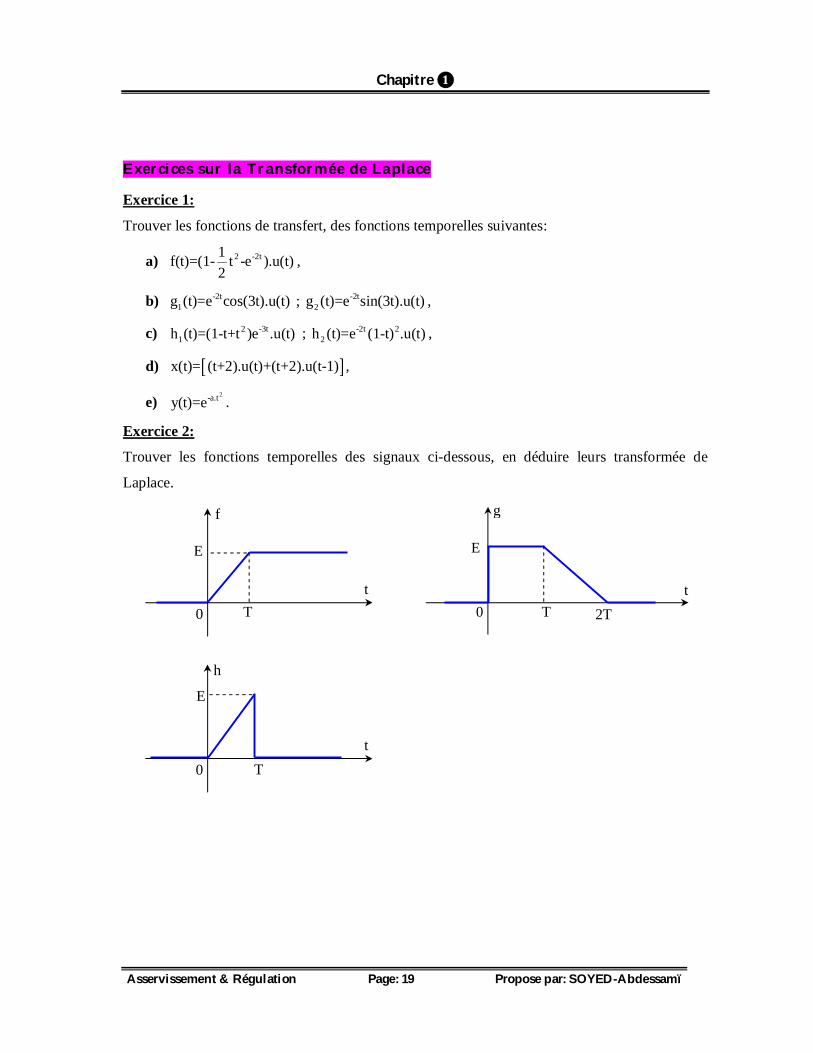
Exercice 2:
Trouver les fonctions temporelles des signaux ci-dessous, en déduire leurs transformée de
Laplace.
tT
E
f
0t
T
E
g
0 2T
tT
E
h
0

Chapitre ❶
Asservissement & Régulation Page: 20 Propose par: SOYED-Abdessamï
Exercice 3:
Déterminer les fonctions de transfert, des fonctions temporelles suivantes (u: Echelon):
a) π πf(t)=sin(wt- ).u(wt- )3 3
,
b) πg(t)=sin(wt).u(wt- )3
c) πh(t)=sin wt- .u(wt)3
.
Eléments de Réponses
Exercice 1:
a) 3
1 1 1L f(t) =F(p)= - -p p p+2
,
b) 1 2
(p+2)G (p)=(p+2) +9
; 2 2
3G (p)=(p+2) +9
,
c) 1 2 3
1 1 2H (p)= - +p+3 (p+3) (p+3)
, 2 2 3
1 2 2H (p)= - +p+2 (p+2) (p+2)
d) -p2 2
2 1 3 1X(p)= + +( + ).ep p p p
e) Y(p)=
Exercice 2:
Fonctions temporelles des signaux et leurs transformée de Laplace :
E Ef(t)= t.u(t)- (t-T).u(t-T)T T
, -pT2
EF(p)= (1-e )Tp
;
E Eg(t)= u(t)- (t-T).u(t-T)-(t-2T).u(t-2T)T T
, -pT -2pT2
E EG(p)= - (e -e )p Tp
;
E Eh(t)= u(t)- (t-T).u(t-T) -Eu(t-T)T T
, -pT -pT2
E EH(p)= (1-e )- e )Tp p

Chapitre ❶
Asservissement & Régulation Page: 21 Propose par: SOYED-Abdessamï
Exercice 3:
Déterminer les fonctions de transfert, des fonctions temporelles suivantes (u: Echelon):
a) π-3wF(p)= e
p+w, en appliquant le théorème de retard
b) π-3
2 2(w-p 3)G(p)=e2(p +w )
,
c) πh(t)=sin wt- .u(wt)3
,
Exercices sur le Produit de Convolution
Exercice 1:
Déterminer la nature des systèmes continus suivants s’ils sont de type:
Linéaire ou non,
Dynamique ou statique,
Variant ou non,
Causal, anti-causal ou non causal,
1. f(t)=cos(5t).u(t) ;
2. g(t)=u(t-2)+u(t-2) ;
3. 0 ; t<0h(t)=
u(t)+u(t-2) ; t 0
4. du(t)y(t)=dt
;
5. t
-x(t)= u(τ)dτ
.

Chapitre ❶
Asservissement & Régulation Page: 22 Propose par: SOYED-Abdessamï
Eléments de Réponses
Exercice 1:
1. Système statique, linéaire, variant et causal.
2. Système dynamique, linéaire, variant et non causal.
3. Système dynamique, linéaire, variant et causal.
4. Système dynamique, linéaire, variant et non causal.
5. Système dynamique, linéaire, variant et non causal.
Exercices sur la Transformée de Laplace Inverse
Trouver les origines des fonctions de transfert suivantes:
a) 4F(p)=P+3
; 2
1G(p)=P +4p+4
,
b) 2
1H(p)=p +3p+2
; 2
p+1X(p)=P +5p+6
,
c) 2
2W(p)=(p+2)
; 2 3
1 1 2S(p)= - -(p+1) (p+1) p
d) 2
p+2K(p)=p +2p+3
,

Chapitre ❶
Asservissement & Régulation Page: 23 Propose par: SOYED-Abdessamï
Eléments de Réponses
a) -1 -1 -3t4f(t)=L F(p) =L ( )=(4e ).u(t)P+3
; -1 -2t2
1g(t)=L ( )=(te ).u(t)P +4p+4
,
b) -1 -1 -t -2t2
1 1 1h(t)=L ( )=L ( - )=(e -e ).u(t)p +3p+2 P+1 p+2
; -1 -2t -3t2p+4x(t)=L ( )=(2e -e ).u(t)
p +5p+6,
c) -1 -2t2
2w(t)=L =2e .u(t)(p+2)
; -1 -t -t 22 3
1 1 2s(t)=L [ - - ]=[e -te -t ].u(t)(p+1) (p+1) p
d) -1 -2t2
p+2 1k(t)=L [ ]=e [cos( 2.t)+ sin( 2.t)].u(t)p +2p+3 2
,

Chapitre ❶
Asservissement & Régulation Page: 24 Propose par: SOYED-Abdessamï
Exercices sur les équations différentielles
Résoudre les équations différentielles suivantes par la méthode de la Transformé de Laplace
a) 2
2dy dy+2 +y=0dt dt
; y(0)=2 et y’(0)=0,
b) 2
-2t2
dy dy+6 +9y=e .u(t)dt dt
; y(0)= y’(0)=0,
c) 2
-2t 22
dy -y=(3e +t +1).u(t)dt
; y(0)= y’(0)=0,
d) 2
-t 22
dy -4y=(3e -t ).u(t)dt
; y(0)= 0, y’(0)=2,
e) 2
-t2
dy +y=e cos(2t).u(t)dt
; y(0)= y’(0)=0,
f) 2
2dy +y=u(t)-u(t-1)dt
; y(0)=2 ; y’(0)=0,
Eléments de Réponses: Eq_diff
Chapitre ❷
Asservissement & Régulation Page: 25 Propose par: SOYED-Abdessamï
Chapitre 2: Modélisation d’un Système Linéaire Continu
Invariant

Chapitre ❷
Asservissement & Régulation Page: 26 Propose par: SOYED-Abdessamï
1. Différents types de Systèmes Industriels
1.1. Système mono entrée sortie
C’est un système automatisé qui possède une seule entrée et une seule sortie.
1.2. Système plusieurs entrées et mono sortie
C’est un système automatisé qui possède plusieurs entrées et une seule sortie.
1.3. Système mono entrée et plusieurs sorties
C’est un système automatisés qui possède une seule entrées et plusieurs sorties.
1.4. Système Invariant
C’est un système dont leurs paramètres ne se modifient pas dans le temps. En réalité le processus
industriel subit un vieillissement, causé par l’usure, fatigue…etc.
1.5. Système Continu
C’est un système où les variables d’entrée et de sortie sont définies pour tout instant, les signaux
sont analogiques.
En revanche, les signaux de commande moderne des systèmes industriel, est de type digital ce
qui nécessite un échantillonnage de ces signaux. Ce sont des systèmes et des signaux discrets.
1.6. Système Linière
C’est un système qui obéit au théorème de Superposition
e(t) s(t)ProcessusIndustriel
1e (t) s(t)ProcessusIndustriel
ne (t)
e(t) 1s (t)ProcessusIndustriel
ns (t)

Chapitre ❷
Asservissement & Régulation Page: 27 Propose par: SOYED-Abdessamï
2. Modélisation des Systèmes Linaires Continus Invariants
Les systèmes industriels ceux sont des systèmes complexes, il est plus facile de le décomposer
en sous-systèmes, afin de le modélisé, par un modèle de comportement ou un modèle de
connaissance.
2.1.Modèle de connaissance
C’est un modèle définit à partir des équations différentielles (lois physiques).
2.2.Modèle de comportement
C’est un modèle qui est remplacé par une boîte noire. Il est identifié (obtenu) à partir de résultats
expérimentaux.
3. Modélisation d’un Système LCI
En réalité, il n’existe pas un système linéaire continu décrivant ou modélisant un processus
industriel. On suppose que le modèle du processus est linéaire pour des raisons de simplification.
Un système linéaire est excité par une entrée x(t), il est régi par une sortie y(t), qui peut être
modélisé par une équation différentielle à coefficients constants de type: n n-1 m m-1
n n-1 0 m m-1 0n n-1 m m-1
d y d y d x d xa +a +...+a y=b +b +...+b xdt dt dt dt
L’étude portera autour d’un état stable, les conditions initiales seront considérées comme nulles.
La transformée de Laplace de cette équation, définie une fonction de transfert (transmittance) en
boucle ouverte du système Y(p)H(p)=X(p)
. Elle peut être représentée par un schéma fonctionnel
(schéma bloc), qui exprime la relation Y(p)=H(p).X(p) .
Fig.2.1: Schéma bloc d’une fonction de transfert
La transformé inverse de Laplace de H(p) est délicate car elle fait intervenir un produit de
convolution+
-y(t)=h x(t)= h(τ).x(t-τ)dτ
.
H(p)Y(p)X(p)

Chapitre ❷
Asservissement & Régulation Page: 28 Propose par: SOYED-Abdessamï
Par contre l’étude dans le plan de Laplace, fait intervenir une multiplication simple :
Y(p)=H(p).X(p)
La fonction de transfert H(p) peut se mettre sous la forme suivante: m
jm m-1j=1m m-1 0 1 2 mnn n-1
n n-1 0 1 2 ni
i
(p-p )b p +b p ..+b (p-z )(p-z )..(p-z )Y(p)H(p)= = =K. =K.
X(p) a p +a p ..+a (p-p )(p-p )..(p-p )(p-p )
Les (zi ) et (pj ) forment respectivement les zéros et les pôles de la fonction transfert H (p).
Les nombres des pôles et des zéros, donnent respectivement les degrés, du dénominateur et le
degré du numérateur (n; m). Elle peut s’écrire aussi sous la forme2
l 2N 2
l 2
1+c .p+c .p ...KH(p)= ( )P 1+d .p+d .p +...
.
Avec (N; K) , représente respectivement, la classe et le gain statique de système.
4. Réponses particulières (signaux tests)
La réponse sortie y(t) dépend de signal d’entré d’excitation x(t). Elle peut être décomposée en
une somme de deux fonctions 1 2(t) (ty =y +y) (t) , avec y1(t) est la réponse libre et y2(t) est la
réponse forcée.
2.1.Réponse Impulsionnelle
L’entrée est une impulsion de Dirac x(t)=δ(t) , alors la sortie est Y(p)=H(p) , par conséquent on a
y(t) = h(t) ; h(t): est appelée réponse Impulsionnelle.
2.2.Réponse Indicielle
L’entrée est un échelon unité x(t)=u(t) , la sortie y (t) est appelée réponse Indicielle.
2.3.Réponse harmonique
L’entrée est une fonction sinusoïdale de type 0x(t)=X .sin(wt) , la réponse harmonique obtenue
est exprimée par Y(p)=Y(jw) , par conséquent on obtient 0y(t)=Y .sin(wt-φ) .
Le module et l’argument de la fonction de transfert en régime harmonique, valent alors:
0
0
YH(jw) = ; φ=arg(H(jw)X
.

Chapitre ❷
Asservissement & Régulation Page: 29 Propose par: SOYED-Abdessamï
5. Pôles et zéros d’une fonction de transfert
La connaissance des pôles et des zéros d’une fonction de transfert sont primordiaux pour l’étude
d’un asservissement. La fonction de transfert peut être mise sous une forme faisant apparaître les
pôles et les zéros, on peut l’écrire alors 0 1 m
0 1 n
p-z p-z p-zH(p)=k + +.....+p-p p-p p-p
.
6. Asservissement et Régulation d’un système linéaire
On parle d’un système asservi ou une poursuite, quand la sortie suit l’entrée (excitation), pour
une entrée dynamique (variable avec le temps).
Par contre si l’entrée de la boucle d’un processus Industriel est constante ou il varie par paliers,
on parle alors de régulation.
Fig.2.2: Schéma bloc d’une boucle d’asservissement ou de régulation
Avec
E(p) et S(p) : Entrée (consigne) et sortie du processus,
(p): Erreur,
K(p): Correcteur du processus,
H(p): Fonction de transfert du processus,
Cp(p) : Capteur d’informations de la chaîne de retour.
Exemples:
Asservissement de vitesse ou de position d’un moteur électrique,
Asservissement de l’altitude d’un avion.
Régulation de la température d’un réfrigérateur,
Régulation de la température d’un four électrique.
K(p)
E(p) S(p)H(p)
(p)Cp

Chapitre ❷
Asservissement & Régulation Page: 30 Propose par: SOYED-Abdessamï
7. Exemple de modélisation des processus industriels
Un système industriel peut être décrit par une équation différentielle.
7.1.Système mécanique
On considère le système mécanique de la figure ci-dessous, qui est formé par une masse M(kg),
sur laquelle on applique une force F(t) elle est retenue par un ressort de raideur k(N/m) et un
amortisseur de coefficient de frottement visqueux f(N/m/s). On appelle (L) la position de la
masse. L’origine de ce repère est prise au niveau de la position du point de repos de la masse M.
Fig.2.3: Système Mécanique
7.2.Système électrique
On considère le circuit électrique série (RLC) de la figure ci-dessous, il est alimenté par une
source de tension alternative.
Fig.2.4: Système Mécanique
L‘équation différentielle modélisant ce circuit est donnée par2
2
d u due(t)=LC +RC +udt dt
.
F(t)f
k
M Masse
C
i
u
LR
e
Chapitre ❸
Asservissement & Régulation Page: 31 Propose par: SOYED-Abdessamï
Chapitre 3: Analyse Temporelle et Fréquentielle d’un SLC

Chapitre ❸
Asservissement & Régulation Page: 32 Propose par: SOYED-Abdessamï
1. Etude d’un Système Linéaire Continu (SLC) de premier ordre
On considère un processus industriel, modélisé par une équation différentielle de premier ordre
de type dsτ +s=ke(t)dt
; avec e: entrée, s: sortie, k: gain statique et : constante de temps.
La transformée de Laplace de cette équation différentielle, permet d’obtenir sa fonction de
transfert S(p) kH(p)= =E(p) 1+τp
.
Exemples : Circuit RC série et circuit RL série
Fig.3.1: Circuits RL et RC série
Circuit RC: L’équation différentielle décrivant ce circuit est donnée par due=u+RCdt
, avec
=RC: constante de temps du circuit. On suppose de plus que le condensateur est initialement
déchargé (u(0)=0). La transformée de Laplace de l’équation différentielle permettant d’obtenir sa
fonction de transfert, qui est exprimée par U(p) 1H(p)= =E(p) 1+τp
.
Circuit RL: L’équation différentielle décrivant ce circuit est donnée par L die=i+R dt
, avec
Lτ=R
: constante de temps du circuit. On suppose que l’inductance est initialement déchargée
(i(0)=0). La transformée de Laplace de l’équation différentielle permet d’obtenir sa fonction de
transfert I(p) 1H(p)= =E(p) 1+τp
.
Ce
i R
u L
i R
e u

Chapitre ❸
Asservissement & Régulation Page: 33 Propose par: SOYED-Abdessamï
Pour le circuit RC série l’entrée et la sortie est une tension. Pour le circuit RL série l’entrée est
une tension, alors que la sortie est un courant. Les (la) conditions initiales sont nulles pour une
grandeur ou ses dérivées d’un système physique, prouve que ce dernier (processus physique) part
de son état de repos ou à partir d’un point de son fonctionnement.
1.1.Analyse temporelle
1.1.1. Réponse Impulsionnelle
Le système de premier ordre est excité par une impulsion de Dirac unitaire (t), sa transformée
de Laplace vaut E(p)=L[δ(t)]=1, d’ouS(p)=H(p).E(p)
La transformée inverse de Laplace de S(p) est fournie part--1 -1 τk kL [S(p)]=L [ ]=s(t)= e
(τp+1) τ.
1.1.2. Réponse Indicielle
Le système de premier ordre est excité par un échelon unitaire e(t)=u(t), sa transformée de
Laplace vaut 1E(p)=L[u(t)]=P
; d’ouS(p)=H(p).E(p) .
La transformée inverse de Laplace est fournie par: t--1 -1 τ
S p kL [ ]=L [ ]=s t =k(1- e )p p(τp+1)
Temps de réponse:
On caractérise le régime transitoire de la réponse indicielle, par un temps de réponse (tr). Il est
obtenue quand la valeur finale du régime permanent du processus atteint ( 32 ) de la valeur
finale d’entrée, elle est donnée par rt =3τ .
k1+τp
u(t)e(t) s(t)
k1+τp
e(t)=δ(t) s(t)

Chapitre ❸
Asservissement & Régulation Page: 34 Propose par: SOYED-Abdessamï
Temps de montée:
C’est le temps mis pour que la sortie du processus atteigne 90% de la valeur finale du régime
établit. On a donc alors:mt-τ0.9k=k(1-e ) , d’ou mt =2.3.τ .
Conclusion:
Si la constante de temps () est faible, par conséquent le temps de réponse (tr) l’est aussi, donc le
système est rapide. Si () est grande, le système est lent.
1.1.3. Réponse à une Rampe
Le système de premier ordre est excité par une rampe unitaire e(t)=r(t). Elle est appelée aussi
réponse en vitesse, sa transformée de Laplace vaut 21E(p)=L[r(t)]=P
;d’ou S p =H(p).E(p) .
La transformée inverse de Laplace est t--1 -1 τ
2 2
S p kL [ ]=L [ ]=s t =k(t-τ+τe )p p (1+τp)
.
0 2 4 6 8 100
0.5
1Réponse Impulsionnelle
Sortie s
0 2 4 6 8 100
0.5
1
Sys
tem
e de
Pre
mie
r Ord
re
Réponse Indicielle
Entrée eSortie s
0 2 4 6 8 100
5
10
Temps(s)
Réponse à une rampe
entrée esortie s
Fig.3.2: Réponse à une δ(t) , à un u(t) et une r(t) d’un système de premier ordre
k1+τp
e(t)=r(t) s(t)

Chapitre ❸
Asservissement & Régulation Page: 35 Propose par: SOYED-Abdessamï
La réponse à une rampe présente une erreur de traînage. On voit que si ( k 1 ), la sortie ne suit
pas l’entrée. On dit qu’elle traîne. L’écart s’agrandit régulièrement et à la limite devient infini.
L’erreur de traînage vaut: Tε =k.τ
Conclusions:
Un système du premier ordre ne suit pas en vitesse.
Un système du premier ordre est donc stable.
1.2.Analyse harmonique
Cette analyse est nommée aussi analyse fréquentielle, c'est-à-dire que le système de premier
ordre est excité par un signal sinusoïdal. Il suffit de remplacer l’opérateur de Laplace par (jw) .
La fonction de transfert s’écrit alors kH jw =1+jτ w
; avec c1w =τ
: appelle pulsation de coupure.
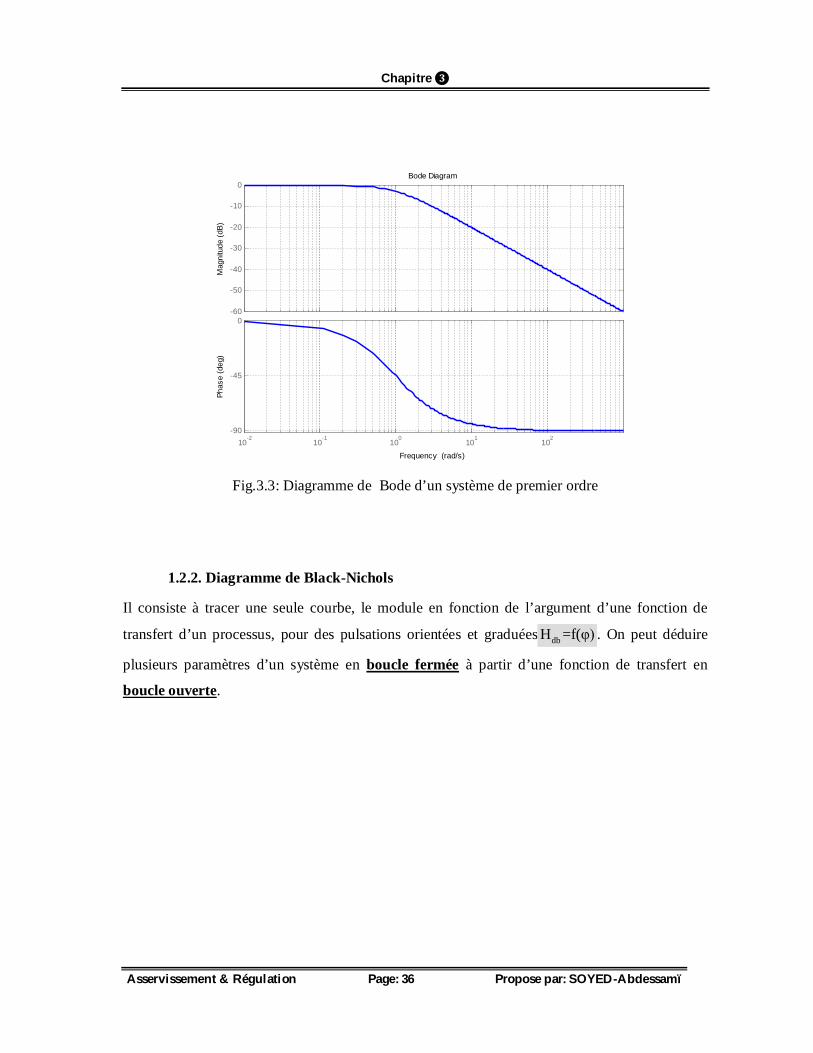
1.2.1. Diagramme de Bode
Il consisté à tracer deux courbes de la fonction complexe ( H(jw) ), le module et la de phase en
fonction de fréquences (pulsations). Ils sont donnes par:
2
c
c
kH(jw) =w1+( )w
wφ=arg(H(jw)=-arctan( )w
Soit en décibel (échelle semi-logarithmique), pour faciliter l’allure des courbes, et sont donnés
par:
2db
c
c
wH =20.Log(k)-10.Log[1+( ) ] w
wφ=arg(H(jw)=-arctan( )w
Chapitre ❸
Asservissement & Régulation Page: 36 Propose par: SOYED-Abdessamï
-60
-50
-40
-30
-20
-10
0
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/s) Fig.3.3: Diagramme de Bode d’un système de premier ordre
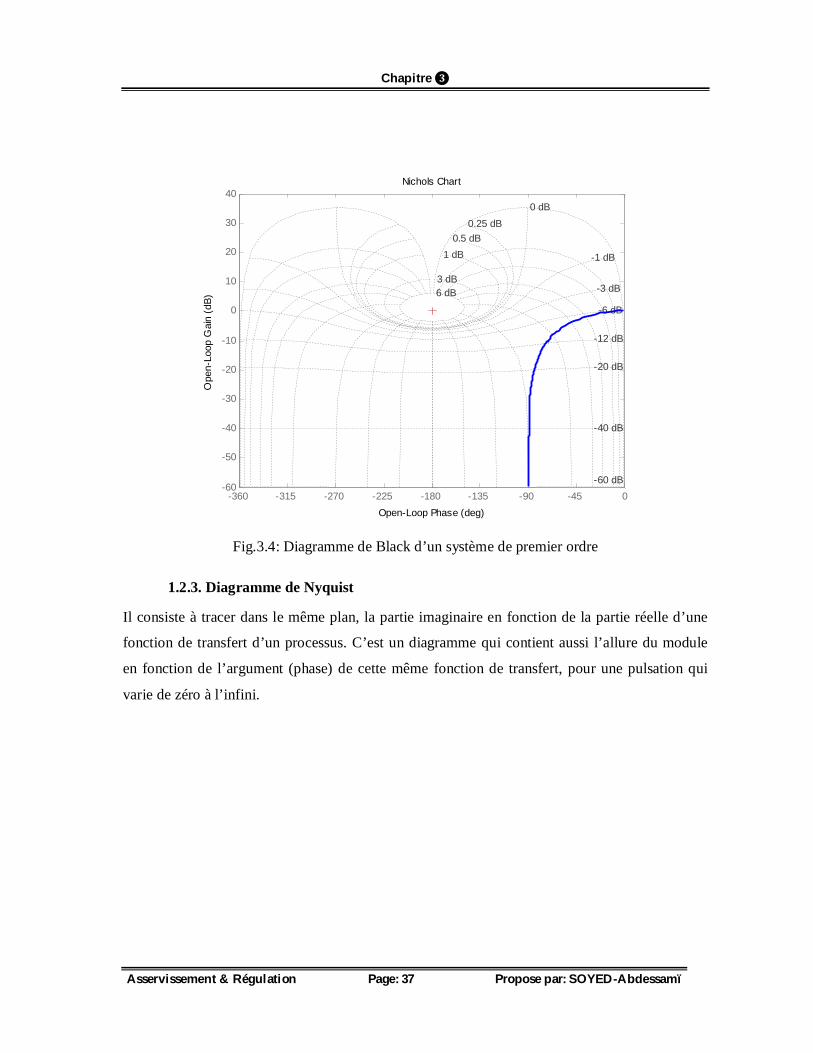
1.2.2. Diagramme de Black-Nichols
Il consiste à tracer une seule courbe, le module en fonction de l’argument d’une fonction de
transfert d’un processus, pour des pulsations orientées et graduées dbH =f(φ) . On peut déduire
plusieurs paramètres d’un système en boucle fermée à partir d’une fonction de transfert en
boucle ouverte.
Chapitre ❸
Asservissement & Régulation Page: 37 Propose par: SOYED-Abdessamï
Nichols Chart
Open-Loop Phase (deg)
Ope
n-Lo
op G
ain
(dB)
-360 -315 -270 -225 -180 -135 -90 -45 0-60
-50
-40
-30
-20
-10
0
10
20
30
40
6 dB 3 dB
1 dB 0.5 dB
0.25 dB 0 dB
-1 dB
-3 dB
-6 dB
-12 dB
-20 dB
-40 dB
-60 dB
Fig.3.4: Diagramme de Black d’un système de premier ordre
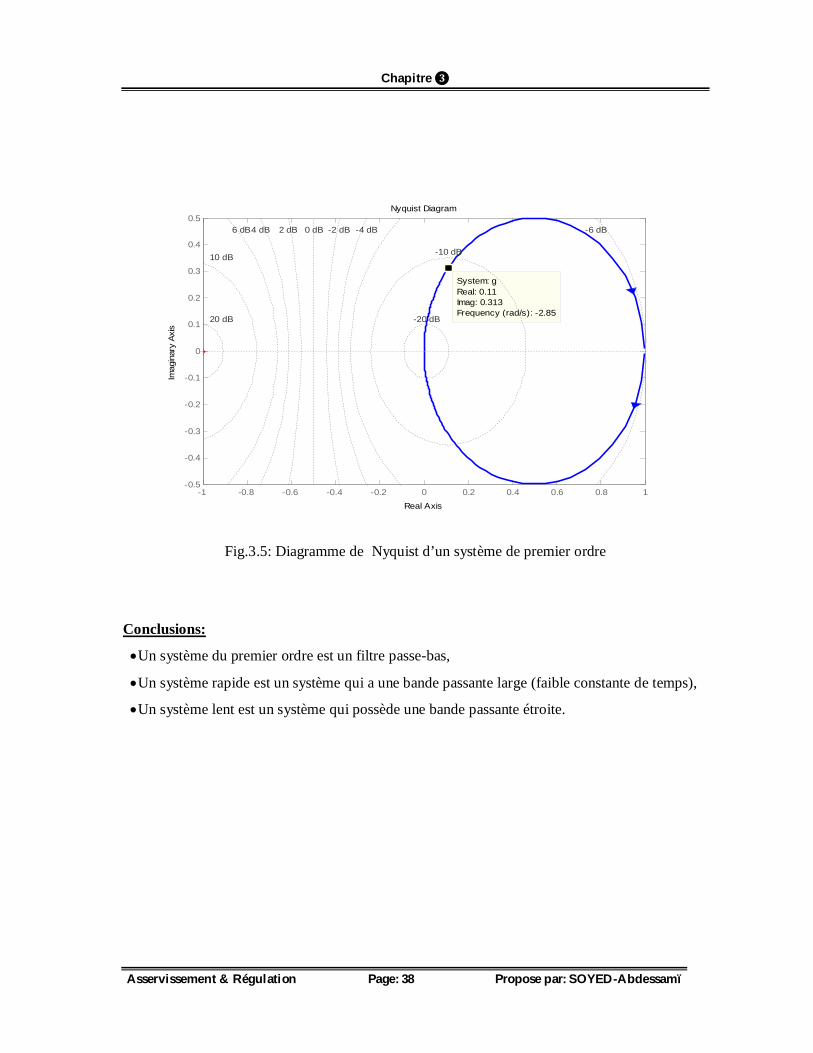
1.2.3. Diagramme de Nyquist
Il consiste à tracer dans le même plan, la partie imaginaire en fonction de la partie réelle d’une
fonction de transfert d’un processus. C’est un diagramme qui contient aussi l’allure du module
en fonction de l’argument (phase) de cette même fonction de transfert, pour une pulsation qui
varie de zéro à l’infini.
Chapitre ❸
Asservissement & Régulation Page: 38 Propose par: SOYED-Abdessamï
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
System: gReal: 0.11Imag: 0.313Frequency (rad/s): -2.85
0 dB
-20 dB
-10 dB
-6 dB-4 dB-2 dB
20 dB
10 dB
6 dB4 dB 2 dB
Fig.3.5: Diagramme de Nyquist d’un système de premier ordre
Conclusions:
Un système du premier ordre est un filtre passe-bas,
Un système rapide est un système qui a une bande passante large (faible constante de temps),
Un système lent est un système qui possède une bande passante étroite.

Chapitre ❸
Asservissement & Régulation Page: 39 Propose par: SOYED-Abdessamï
2. Etude du Système Linéaire Continu (SLC) de deuxième ordre
Un processus industriel peut être décrit par une équation différentielle de deuxième ordre de
type 2
2 1 0 02
d s dsa +a +a s=b e(t)dt dt
; avec e: entrée et s: sortie et ( 2 1 0 0a ; a ; a ; b ) étant les paramètres
constants du processus.
La transformée de Laplace de l’équation différentielle précédente (toutes les conditions initiales
sont nulles), permet d’obtenir sa fonction de transfert:
0
0 22
2 012 1 0
2 2
bS p b aH p = = = aaE p a p +a p +a p + p +
a a
.
La transmittance canonique est fournie par 20
2 20 0
k.wH p =p +2mw .p+w
Il suffit comparer les deux expressions, pour identifier les coefficients caractérisant la fonction
de transfert canonique:
0
0
bk=a
: Gain statique,
00
2
aw =a
: Pulsation propre,
1
0 2
am=2 a a
: Coefficient d'amortissement.

Chapitre ❸
Asservissement & Régulation Page: 40 Propose par: SOYED-Abdessamï
Circuit RLC série:
Fig.3.6: Circuits RLC série
Ce circuit est décrit par une équation différentielle de deuxième ordre de
type2
2
d s R ds 1 e+ + s=dt L dt LC LC
. Elle peut être mise sous sa forme canonique (les conditions initiales
sont nulles)2
2 20 0 02
d s ds+2mw +w s=w edt dt
.
01w =LC
: Pulsation propre du système (rad/s),
R Cm=2 L
: Facteur d’amortissement sans dimensions,
Lτ=R
: Constante de temps(s),
01 1 LQ= = =τw
2m R C: Facteur de qualité.
Par conséquent la transmittance de circuit est donné par20
2 20 0
kwS(p)H(p)= =E(p) p +2mw p+w
.
C
i
s
LR
e
E(p) S(p)20
2 20 0
kwp +2mw p+w

Chapitre ❸
Asservissement & Régulation Page: 41 Propose par: SOYED-Abdessamï
2.1.Solutions de l’équation du système du 2eme ordre
Elle admet une équation caractéristique 2 20 0p +2mw .p+w =0 , son discriminant est 2 2
0Δ=4(m -1)w .
2.1.1. Cas du régime apériodique (m>1):
Pour ce régime l’équation caractéristique admet deux racines réelles négatives:
212 0p =-w (m± m -1) , si de plus on pose 1
1
1τ =P
et 2 12
1τ = >τp
.
2.1.2. Cas du régime pseudopériodique (m< 1):
Pour ce régime l’équation caractéristique admet deux racines complexes conjuguées:
1 21p =p =- +jwτ
, avec 0
1τ=mw
et 2p 0w =w 1-m .
wp: Pseudo pulsation (rad/s),
: Temps de relaxation, caractérise la durée des phénomènes transitoires.
2.1.3. Cas du régime critique (m=1):
Pour ce régime critique, l’équation caractéristique admet une racine double 1 2 01p =p =-w =-τ
.

Chapitre ❸
Asservissement & Régulation Page: 42 Propose par: SOYED-Abdessamï
2.2.Etude de la réponse temporelle d’un système 2eme ordre
2.2.1. Coefficients d’amortissement (m>1)
Réponse Impulsionnelle:
La transformé de Laplace de l’entrée L δ(t) =E(p)=1. Sa réponse vaut alors:
1 2 1 2
1 2
k k 1 1S(p)=H(p)E(p)= =( )[ - ]1 1(1+τ p)(1+τ p) τ -τ (p+ ) (p+ )τ τ
, donc la réponse temporelle est
donnée par 1 2
t t- -τ τ
1 2
ks(t)= [e -e ]τ -τ
.
Réponse indicielle:
La transformé de Laplace de l’entrée 1L u(t) =E(p)=p
. Sa réponse vaut alors:
1 2
1 2 1 2 1 2
1 2
τ τk 1 1 1S(p)=H(p)E(p)= =k[ -( ) +( ) ]1 1p(1+τ p)(1+τ p) p τ -τ τ -τ(p+ ) (p+ )τ τ
.
Il s’ensuit la réponse temporelle est donnée par 1 2
t t- -τ τ1 2
1 2 1 2
τ τs(t)=k(1- e + e )τ -τ τ -τ
.
Réponse à une rampe:
La transformé de Laplace de l’entrée 2
1L r(t) =E(p)=p
. Sa réponse vaut alors:
2 21 2 1 2
2 21 2 1 2
1 2
τ +τ τ τk 1 1S(p)=H(p).E(p)= =k[ - + .( - )]1 1p (1+τ p)(1+τ p) p p τ -τ (p+ ) (p+ )τ τ
. Il s’ensuit que la
réponse temporelle est donnée par 1
t t- -τ2 2 τ21 2 1 2
1 2
1s(t)=k.[t- τ +τ + (τ e -τ e )]τ -τ
.
L’erreur de trainage c’est l’écart entre l‘entrée et la sortie: T 1 2ε =k. τ +τ .

Chapitre ❸
Asservissement & Régulation Page: 43 Propose par: SOYED-Abdessamï
Fonction de transfert: 2
4H(p)=p +6p+4
0 2 4 6 8 100
0.5
1Réponse Impulsionnelle
Sortie s
0 2 4 6 8 100
0.5
1
Syst
eme
de D
euxi
emm
e or
dre
(m>1
)
Réponse Indicielle
Entrée uSortie s
0 2 4 6 8 100
5
10
Temps(s)
Réponse à une Rampe)
Entrée rSortie s
Fig.3.7: Réponses à une δ(t) , à un u(t) et une r(t) d’un système de 2eme ordre (m>1)
2.2.2. Coefficient d’amortissement (m=1)
Réponse Impulsionnelle:
La transformée de Laplace de l’entrée L δ(t) =E(p)=1. Sa réponse vaut alors:
2
kS(p)=H(p).E(p)=(1+τp)
, il s’ensuit que la réponse temporelle est donnée part-τks(t)= t.e
τ.
Réponse Indicielle:
La transformée de Laplace de l’entrée 1L u(t) =E(p)=p
. Sa réponse vaut alors:
2 2k 1 τ τS(p)=H(p).E(p)= =k[ - - ]
p(1+τp) p (1+τp) (1+τp). Il s’ensuit que la réponse temporelle est
donnée part t- -τ τts(t)=k.(1-e - e )
τ.
Chapitre ❸
Asservissement & Régulation Page: 44 Propose par: SOYED-Abdessamï
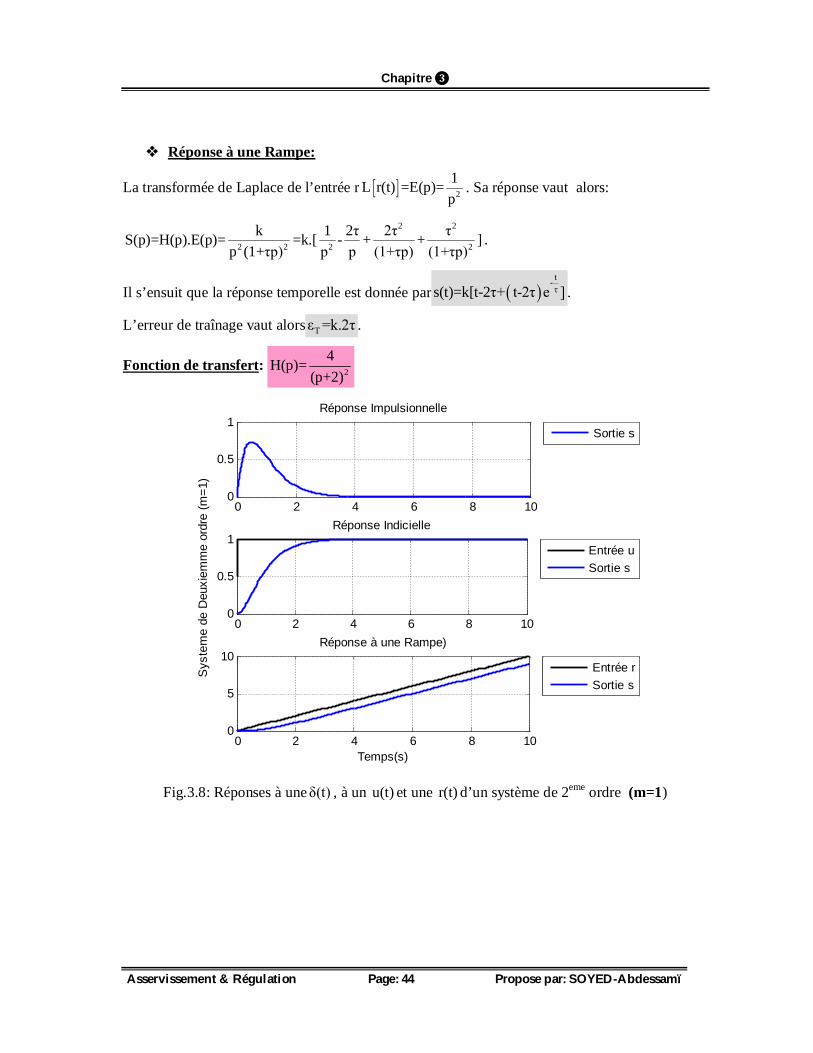
Réponse à une Rampe:
La transformée de Laplace de l’entrée r 21L r(t) =E(p)=p
. Sa réponse vaut alors:
2 2
2 2 2 2k 1 2τ 2τ τS(p)=H(p).E(p)= =k.[ - + + ]
p (1+τp) p p (1+τp) (1+τp).
Il s’ensuit que la réponse temporelle est donnée par t-τs(t)=k[t-2τ+ t-2τ e ] .
L’erreur de traînage vaut alors Tε =k.2τ .
Fonction de transfert: 2
4H(p)=(p+2)
0 2 4 6 8 100
0.5
1Réponse Impulsionnelle
Sortie s
0 2 4 6 8 100
0.5
1
Sys
tem
e de
Deu
xiem
me
ordr
e (m
=1)
Réponse Indicielle
Entrée uSortie s
0 2 4 6 8 100
5
10
Temps(s)
Réponse à une Rampe)
Entrée rSortie s
Fig.3.8: Réponses à une δ(t) , à un u(t) et une r(t) d’un système de 2eme ordre (m=1)

Chapitre ❸
Asservissement & Régulation Page: 45 Propose par: SOYED-Abdessamï
2.2.3. Coefficient d’amortissement (m<1)
Réponse Impulsionnelle:
La transformée de Laplace de l’entrée Lδ(t)=E(p)=1. Sa réponse vaut alors:
20
2 20 0
kwS p =p +2mw p+w
. Il s’ensuit que la réponse temporelle est donnée par :
0-mw .t20
02
kw e s(t)= sin(w 1-m .t)1-m
.Réponse Indicielle:
La transformée de Laplace de l’entrée 1L u(t) =E(p)=p
, sa réponse vaut alors :
20 0
2 2 2 20 0 0 0
kw p+2mw1S p = =k.[ - ]p(p +2mw p+w ) p p +2mw p+w
. Il s’ensuit que la réponse temporelle est
donnée par0-mw .t
202
e s(t)=k.[1- cos(w 1-m .t-φ)]1-m
, avec 2
m φ=arctan( )1-m
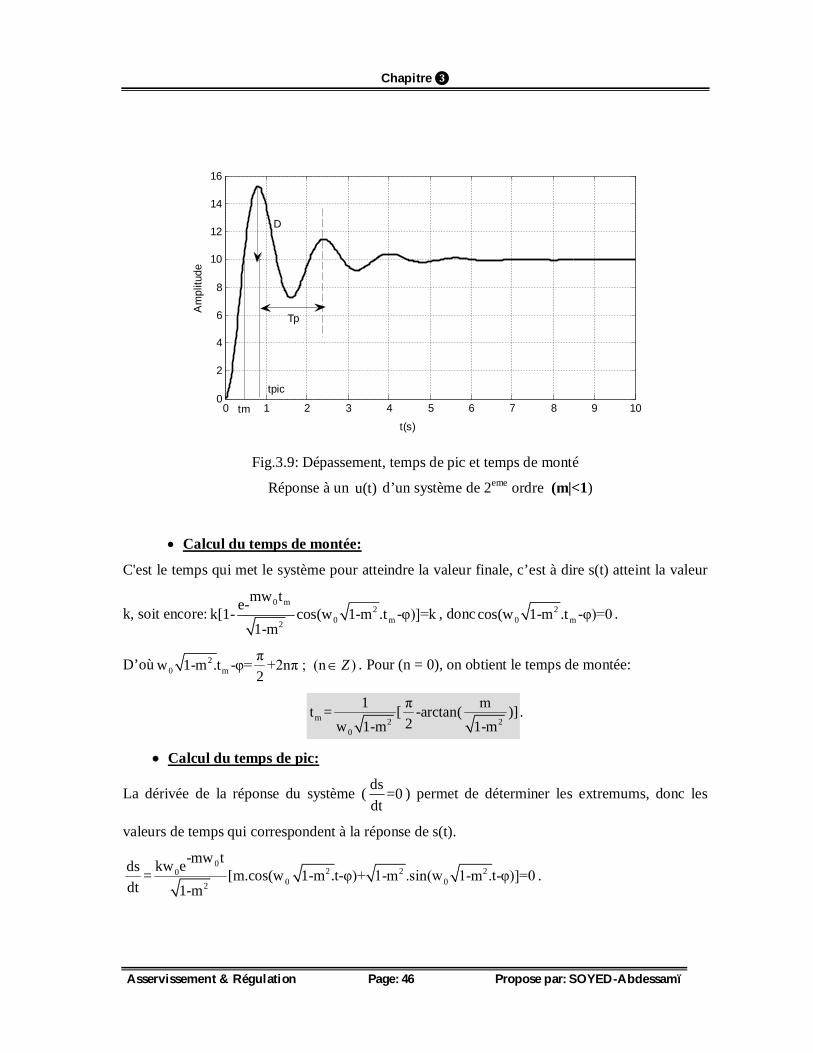
La réponse indicielle est donc oscillatoire amortie, elle est caractérisée par cinq paramètres:
Le temps de montée: tm,
Le temps de réponse: tr,
Le temps de pic: tpic,
Le premier dépassement: D,
La pseudo-période: Tp.
Chapitre ❸
Asservissement & Régulation Page: 46 Propose par: SOYED-Abdessamï
0 1 2 3 4 5 6 7 8 9 100
2
4
6
8
10
12
14
16
Am
plitu
de
t(s)tm
Tp
D
tpic
Fig.3.9: Dépassement, temps de pic et temps de monté
Réponse à un u(t) d’un système de 2eme ordre (m|<1)
Calcul du temps de montée:
C'est le temps qui met le système pour atteindre la valeur finale, c’est à dire s(t) atteint la valeur
k, soit encore:0 m
20 m2
mw te-k[1- cos(w 1-m .t -φ)]=k1-m
, donc 20 mcos(w 1-m .t -φ)=0 .
D’où 20 m
πw 1-m .t -φ= +2nπ ; (n )2
Z . Pour (n = 0), on obtient le temps de montée:
m 2 20
1 π mt = [ -arctan( )]2w 1-m 1-m
.
Calcul du temps de pic:
La dérivée de la réponse du système ( ds =0dt
) permet de déterminer les extremums, donc les
valeurs de temps qui correspondent à la réponse de s(t).
02 2 20
0 02
-mw tkw eds = [m.cos(w 1-m .t-φ)+ 1-m .sin(w 1-m .t-φ)]=0dt 1-m
.

Chapitre ❸
Asservissement & Régulation Page: 47 Propose par: SOYED-Abdessamï
Soit encore 2 2 20 0[m.cos(w 1-m t-φ)+ 1-m .sin(w 1-m t-φ)]=0 .
Donc n 20
n πt =w 1-m
. Le temps de pic s’obtiendra pour n=1: pic 20
πt =w . 1-m
.
Calcul de dépassement:
Il suffit de remplacer le temps (t= tn) dans s(t), pour trouver les dépassements:
2
nmπ-1-m
n 2
e s(t )=k[1- cos(nπ-φ)]1-m
Les valeurs minimales de s(t) s’obtient si n est impaire: 2
nmπ-1-m
n mins(t ) =k[1-e ] .
Les valeurs maximales de s(t) s’obtient si n est paire: 2
nmπ-1-m
n maxs(t ) =k[1+e ] .
Le premier dépassement s’obtient pour (n = 1), on a obtient alors:
2
mπ-1 max 1-ms(t ) -kD%=100.( )=100.e
k.
Calcul de pseudo période:
C'est le temps qui sépare deux maximums successifs (ou deux minimums successifs):
p 20
2πT =w 1-m
Calcul de temps de réponse:
Le temps de réponse (tr) est le temps au bout duquel la sortie atteint son régime permanent à 5%,
il est décrit par les deux équations suivantes:
0-mw t2
02 2
t t- -τ1 τ2
1 2
1 2 1 2
e m[ cos(w 1-m .t-arctan( )] 5% ; 1-m 1-m
τ e τ e[ - ] 5% ; τ -τ τ -
m 1
m 1τ
Chapitre ❸
Asservissement & Régulation Page: 48 Propose par: SOYED-Abdessamï
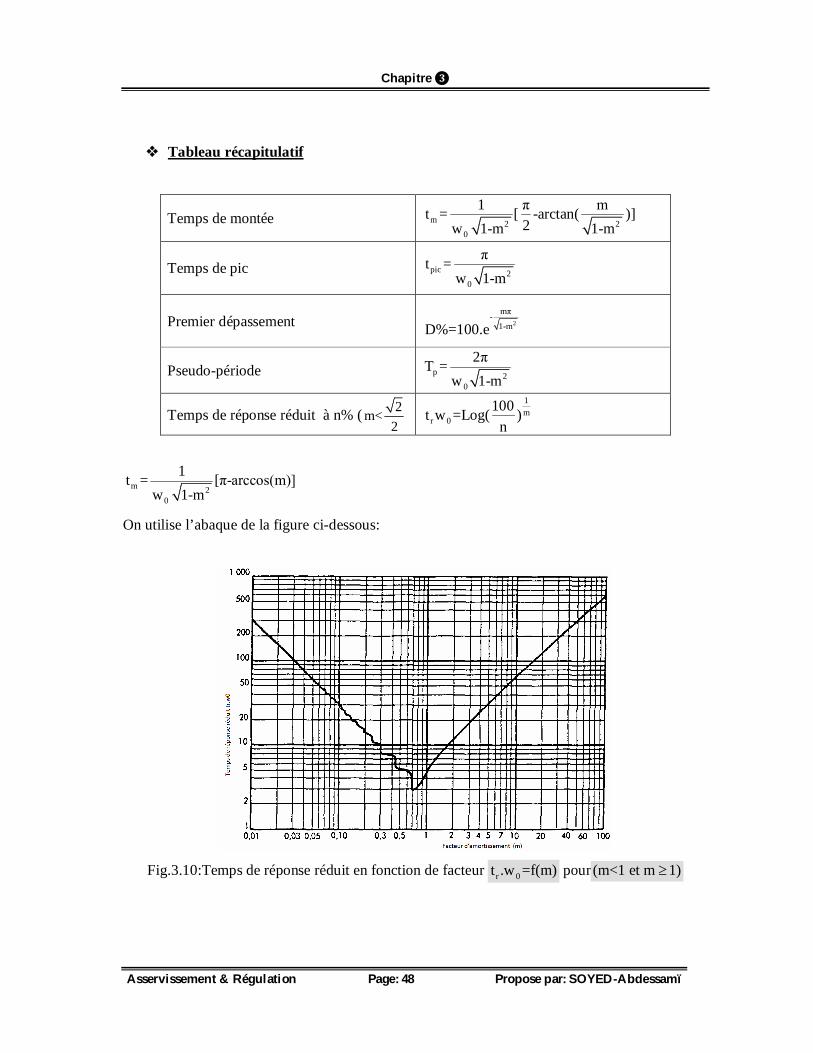
Tableau récapitulatif
Temps de montée m 2 20
1 π mt = [ -arctan( )]2w 1-m 1-m
Temps de pic pic 20
πt =w 1-m
Premier dépassement
2
mπ-1-mD%=100.e
Pseudo-période p 20
2πT =w 1-m
Temps de réponse réduit à n% ( 2m<2
1m
r 0100t w =Log( )
n
m 20
1t = [π-arccos(m)]w 1-m
On utilise l’abaque de la figure ci-dessous:
Fig.3.10:Temps de réponse réduit en fonction de facteur r 0t .w =f(m) pour (m<1 et m 1)

Chapitre ❸
Asservissement & Régulation Page: 49 Propose par: SOYED-Abdessamï
Réponse d’un système de 2eme ordre à une Rampe:
La transformé de Laplace de l’entrée 21L r(t) =E(p)=p
. Sa réponse vaut alors:
2
20 0
2 2 2 2 2 20 0 0 0 0
2m p+4m -1kw w1 2mS p = =k[ - + ]
p(p +2mw p+w ) p w p (p+mw ) +w (1-m).
Il s’ensuit que la réponse temporelle est donnée par:
02 2
020 0
-mw .t2m es(t)=k t- - cos w 1-m .t-arctan(2m 1-m )w w 1-m
L’erreur de traînage vaut alors: T0
2.k.mε =w
.
Fonction de transfert: 2
1H(p)=p +0.4p+1
0 5 10 15 20-1
0
1Réponse Impulsionnelle
Sortie s
0 5 10 15 200
1
2
Sys
tem
e de
Deu
xiem
me
ordr
e (m
<1)
Réponse Indicielle
Entrée uSortie s
0 5 10 15 200
10
20
Temps(s)
Réponse à une Rampe)
Entrée rSortie s
Fig.3.10: Réponses à une δ(t) , à un u(t) et une r(t) d’un système de 2eme ordre (m<1)
Chapitre ❸
Asservissement & Régulation Page: 50 Propose par: SOYED-Abdessamï
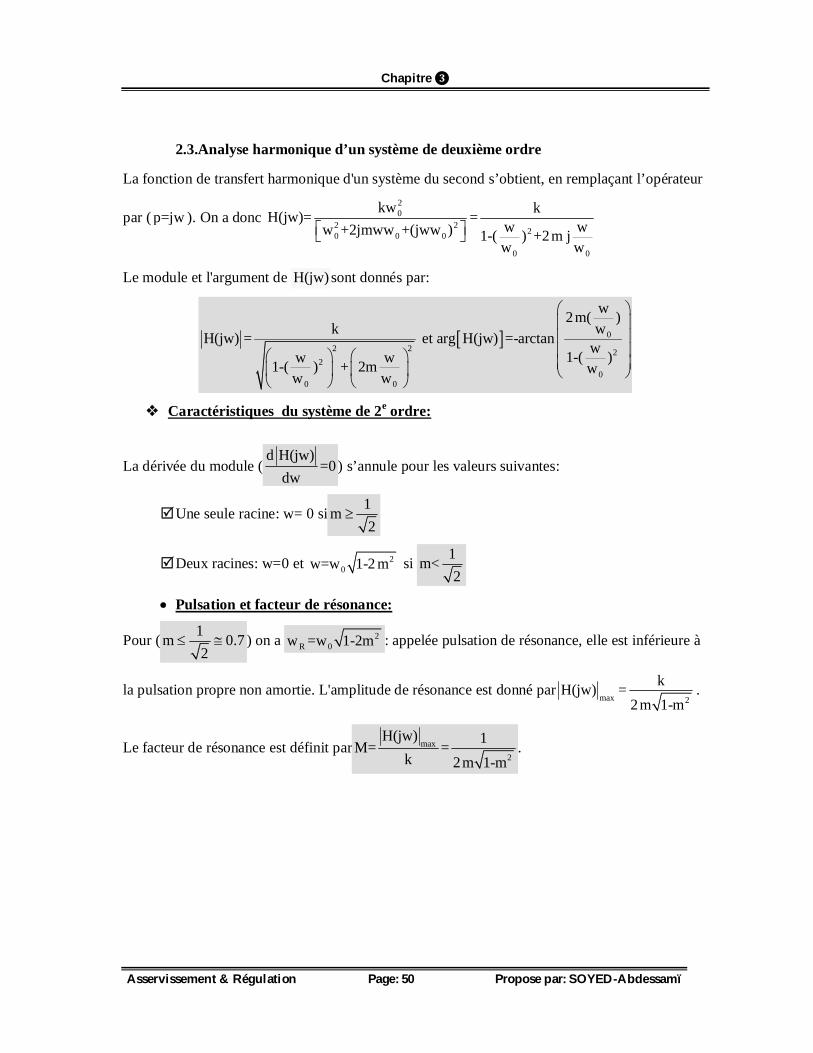
2.3.Analyse harmonique d’un système de deuxième ordre
La fonction de transfert harmonique d'un système du second s’obtient, en remplaçant l’opérateur
par ( p=jw ). On a donc 20
2 220 0 0
0 0
kw kH(jw)= = w ww +2jmww +(jww ) 1-( ) +2m jw w
Le module et l'argument de H(jw) sont donnés par:
02 2 2
20
0 0
w2m( )wkH(jw) = et arg H(jw) =-arctan w1-( )w w1-( ) + 2m ww w
Caractéristiques du système de 2e ordre:
La dérivée du module (H(jw)d
=0dw
) s’annule pour les valeurs suivantes:
Une seule racine: w= 0 si 1m2
Deux racines: w=0 et 20w=w 1-2 m si 1m<
2
Pulsation et facteur de résonance:
Pour ( 1m 0.72
) on a 2R 0w =w 1-2m : appelée pulsation de résonance, elle est inférieure à
la pulsation propre non amortie. L'amplitude de résonance est donné parmax 2
kH(jw) =2m 1-m
.
Le facteur de résonance est définit par max2
H(jw) 1M= =k 2m 1-m
.

Chapitre ❸
Asservissement & Régulation Page: 51 Propose par: SOYED-Abdessamï
Pulsation de coupure:
Pour un gain à -3dB, ce qui correspond à une division par 2 du gain statique naturelle.
On a donc2 2
2
0 0
k kH(jw) = =2w w1-( ) + 2m
w w
. La solution de cette équation donne la
pulsation de coupure 22 2c 0w =w . 1-2m + 2m -1 +1 .
Phase :
Le déphasage de la fonction de transfert H(jw)est donnée par:
0
2
0
w2m( )wφ=arg H(jw) =-arctan w1-( )
w
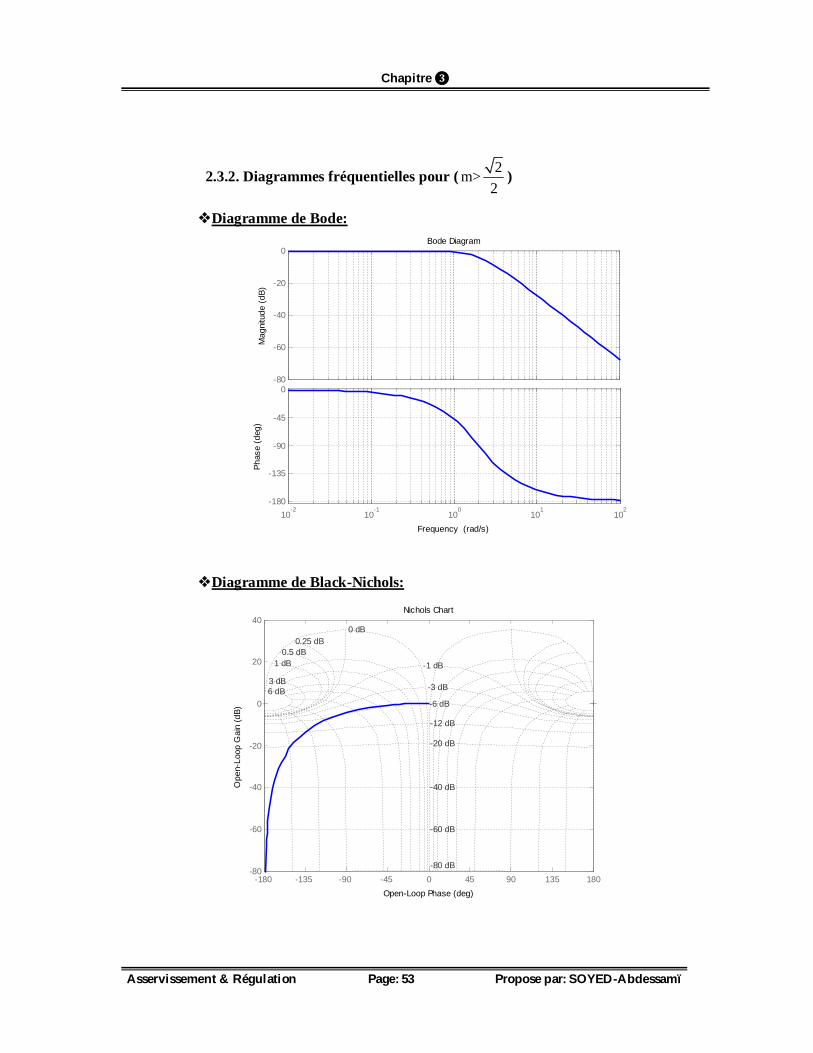
2.3.1. Diagrammes fréquentielles pour ( 2m<2
)
Diagramme de Bode:
-80
-60
-40
-20
0
20
Mag
nitu
de (d
B)
10-1
100
101
102
-180
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/s)
Chapitre ❸
Asservissement & Régulation Page: 52 Propose par: SOYED-Abdessamï
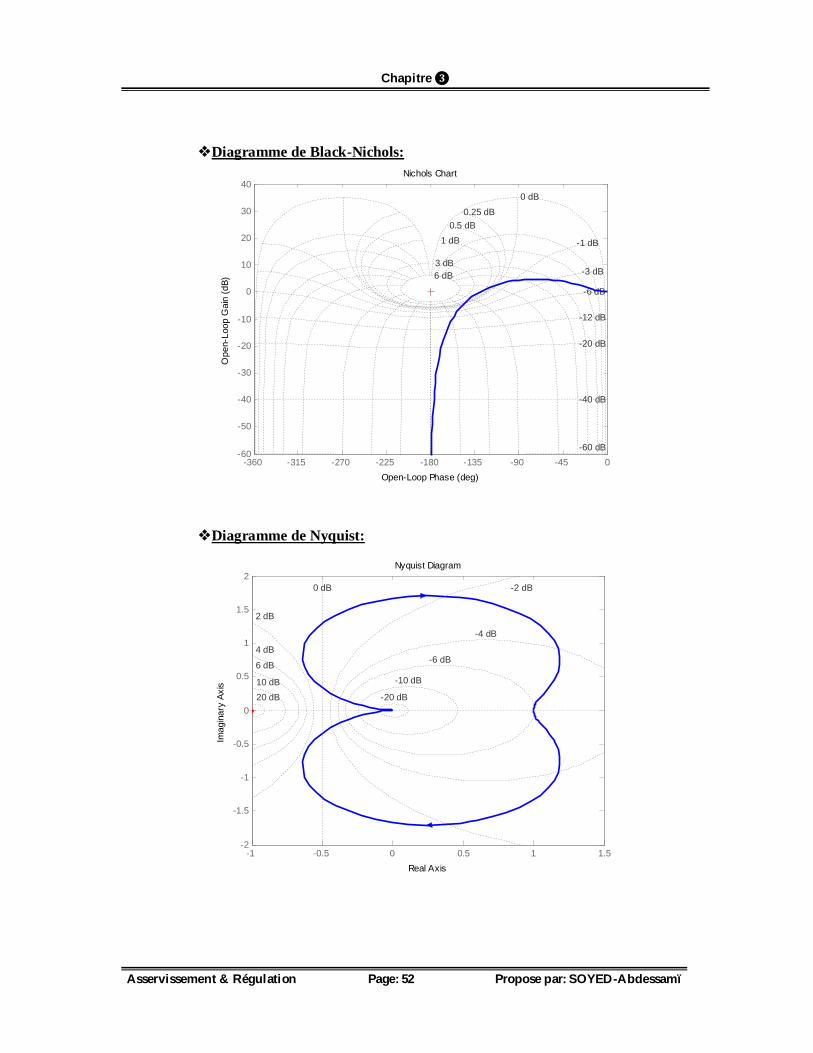
Diagramme de Black-Nichols:
-360 -315 -270 -225 -180 -135 -90 -45 0-60
-50
-40
-30
-20
-10
0
10
20
30
40
6 dB 3 dB
1 dB 0.5 dB
0.25 dB 0 dB
-1 dB
-3 dB
-6 dB
-12 dB
-20 dB
-40 dB
-60 dB
Nichols Chart
Open-Loop Phase (deg)
Ope
n-Lo
op G
ain
(dB)
Diagramme de Nyquist:
-1 -0.5 0 0.5 1 1.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
20 dB
-20 dB
-10 dB
-6 dB
-4 dB
-2 dB
20 dB10 dB
6 dB4 dB
2 dB
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
Chapitre ❸
Asservissement & Régulation Page: 53 Propose par: SOYED-Abdessamï
2.3.2. Diagrammes fréquentielles pour ( 2m>2
)
Diagramme de Bode:
-80
-60
-40
-20
0M
agni
tude
(dB)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/s)
Diagramme de Black-Nichols:
-180 -135 -90 -45 0 45 90 135 180-80
-60
-40
-20
0
20
40
6 dB 3 dB
1 dB 0.5 dB
0.25 dB 0 dB
-1 dB
-3 dB
-6 dB
-12 dB
-20 dB
-40 dB
-60 dB
-80 dB
Nichols Chart
Open-Loop Phase (deg)
Ope
n-Lo
op G
ain
(dB)

Chapitre ❸
Asservissement & Régulation Page: 54 Propose par: SOYED-Abdessamï
Diagramme de Nyquist:
-1 -0.5 0 0.5 1 1.5-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.80 dB
-20 dB
-10 dB
-6 dB -4 dB-2 dB
20 dB
10 dB
6 dB
4 dB 2 dB
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is

Chapitre ❹
Asservissement & Régulation Page: 55 Propose par: SOYED-Abdessamï
Chapitre 4: Les Systèmes Linéaires Continus bouclés

Chapitre ❹
Asservissement & Régulation Page: 56 Propose par: SOYED-Abdessamï
1. Introduction Un système (processus) industriel étant en boucle ouverte n’est pas contrôlé, pour avoir des
informations sur l’évolution de la sortie, on doit boucler la sortie à l’entrée. Dans ce cas, on parle
de la notion d’un système d’asservi.
2. Schéma fonctionnel d’un Système Linéaire Continu Asservi
Fig.4.1
E(p) et S(p) : Entrée (consigne) et sortie du processus,
(p): Erreur,
K(p) et H(p): Correcteur et fonction de transfert du processus,
Cp(p): Capteur d’informations de la chaîne de retour.
3. Fonction de transfert d’un Système Linéaire Continu en Boucle Fermée Un système asservi est constitué d’une chaîne directe représentée par une fonction A (p) et d’une
chaîne de retour représentée par une fonction B(p). La fonction de transfert en boucle fermée du
système est donné par: A(p)G(p)=1+A(p).B(p)
.
Fig.4.2
H(p)K(p)
pC (p)
E(p) S(p)_+
ε(p)
Perturbation
A(p)E(p) S(p)
_+
B(p)

Chapitre ❹
Asservissement & Régulation Page: 57 Propose par: SOYED-Abdessamï
Système asservi à retour unitaire:
Fig.4.3
La fonction de transfert en (BF) de système à retour unitaire est donné par: A(p)G(p)=1+A(p)
.
Transfomation 1:
Fig.4.4
A(p)E(p) S(p)_+
B
E(p) S(p)_+ A
E(p) S(p)_+ A.B
1B
Chapitre ❹
Asservissement & Régulation Page: 58 Propose par: SOYED-Abdessamï
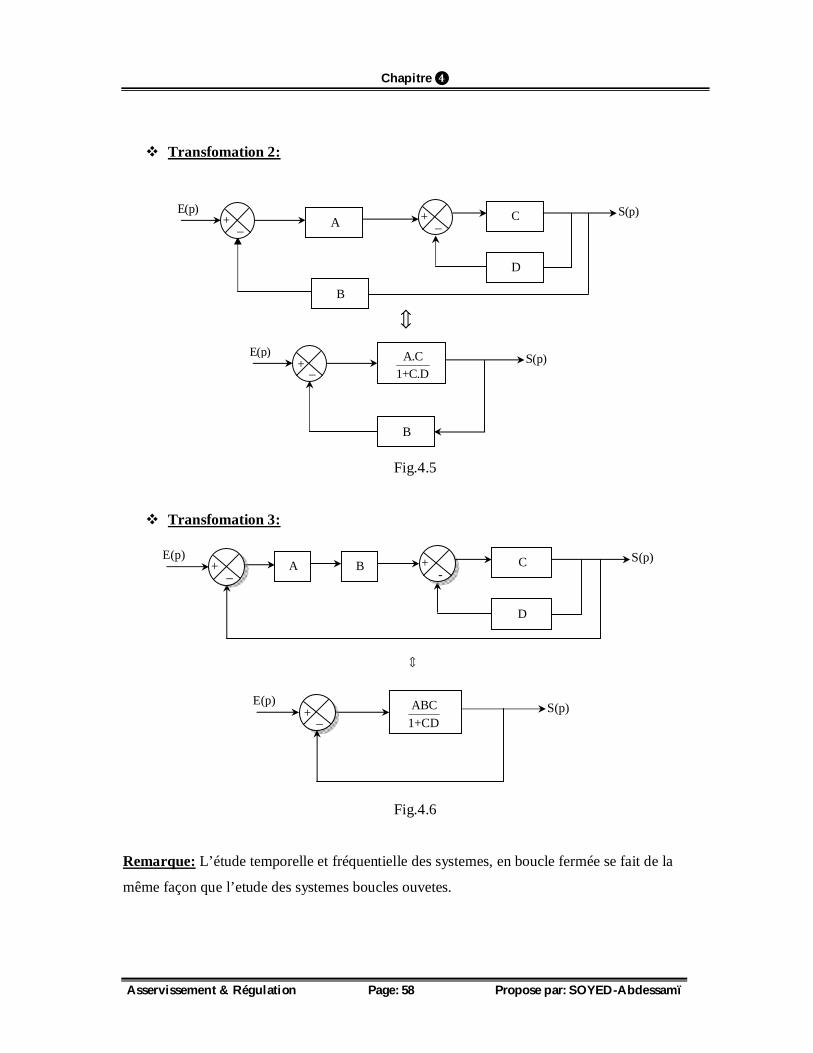
Transfomation 2:
Fig.4.5
Transfomation 3:
Fig.4.6
Remarque: L’étude temporelle et fréquentielle des systemes, en boucle fermée se fait de la
même façon que l’etude des systemes boucles ouvetes.
B
E(p) S(p)_+ A _+ C
D
E(p) S(p)_+ A.C
1+C.D
B
E(p) S(p)_+ ABC
1+CD
E(p) S(p)_+ A
-+ C
D
B
Chapitre ❺
Asservissement & Régulation Page: 59 Propose par: SOYED-Abdessamï
Chapitre 5: Stabilité des Systèmes Linéaires Continus (SLC)
Chapitre ❺
Asservissement & Régulation Page: 60 Propose par: SOYED-Abdessamï
1. Conditions de stabilité
1.1. Domaine temporel
Un système est dit stable, si sa réponse Impulsionnelle est le siège d’un régime amortie.
1.2. Domaine fréquentiel
La décomposition en élément simple de la fonction de transfert est donnée par i
i i
AH(p)=p-p .
Sa réponse Impulsionnelle vaut alors i-p .tii
i i
Ay(t)=L S(p) =L H(p) =L( )=A .ep-p .
Un système linéaire continu n’est stable que si tous les pôles de sa fonction de transfert sont à
partie réelle négative, donc s’ils sont situés dans le demi-plan négatif dédié à la variable
complexe (p).
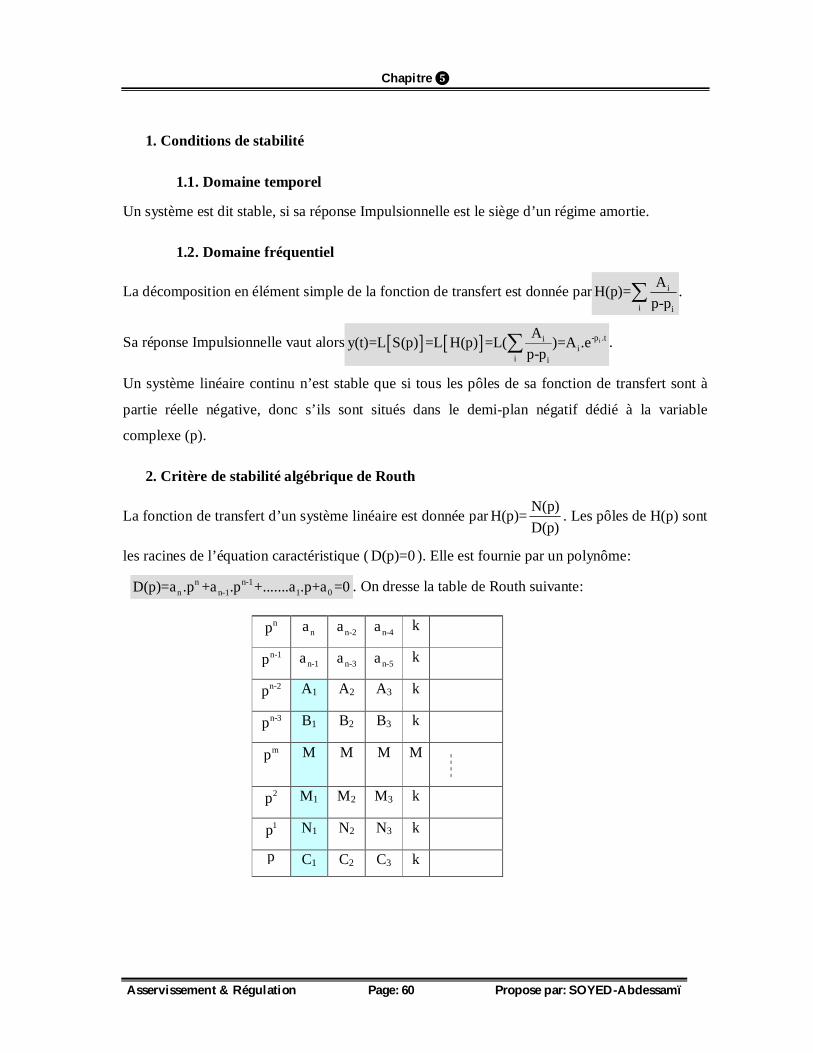
2. Critère de stabilité algébrique de Routh
La fonction de transfert d’un système linéaire est donnée par N(p)H(p)=D(p)
. Les pôles de H(p) sont
les racines de l’équation caractéristique ( D(p)=0 ). Elle est fournie par un polynôme:
n n-1n n-1 1 0D(p)=a .p +a .p +.......a .p+a =0 . On dresse la table de Routh suivante:
np na n-2a n-4a k
n-1p n-1a n-3a n-5a k
n-2p A1 A2 A3 k
n-3p B1 B2 B3 k
mp M M M M
2p M1 M2 M3 k
1p N1 N2 N3 k
p C1 C2 C3 k

Chapitre ❺
Asservissement & Régulation Page: 61 Propose par: SOYED-Abdessamï
On calcule les coefficients de la première colonne:
n-1 n-2 n n-31
n-1
a .a -a .aA =a
; n-1 n-4 n n-42
n-1
a .a -a .aA =a
; 1 n-5 n-1 32
1
A .a -A .AB =A
; 1 n-5 n-1 32
1
A .a -A .AB =A
1 2 1 21
1
N .M -M .NC =N
.
Le système est dit stable si, les coefficients de la première colonne, ont le même signe.
3. Critère de stabilité graphiques
3.1.Critère de Bode
Un système est stable en boucle fermée si le diagramme de Bode de la fonction de transfert en
boucle ouverte, pour une pulsation (w) correspondant un déphasage égal à ( φ=-180° ), la courbe
de gain passe en dessous du niveau ( 0db ).
3.2.Critère de Nyquist
Un système est stable en boucle fermée, si sa réponse fréquentielle en boucle ouverte,
pour w - ; + , il entoure le point critique dans le sens trigonométrique un nombre de fois
égal au nombre de pôles à partie réelle positive de la boucle ouverte.

Exercices
Asservissement & Régulation Page: 62 Propose par: SOYED-Abdessamï
Exercices Exercice 1:
Soit un systéme asservi représenté par le schéma ci-dessous.
1. Simplifier le schéma blocs ci-dessus,
2. En déduire la fonction de transfert S(p)H(p)=E(p)
, en fonction de H1(p) et H2(p),
3. Soit 11H (p)=
p+1et 2
1H (p)=p
, déterminer l’expression de H(p).
Par la suite on prend 2
1H(p)=p +3p+2
.
Le systeme est successivement excité par un échelone =(t) u(t) et une rampee =t(t) .u(t) .
4. Détreminer les expresions 1S (p) et 2S (p) , pour les deux entrées,
5. En déduire leurs valeurs initiales finales,
6. Détreminer les expressions de s1(t) et s2(t), pour les deux entrées,
7. Détreminer le module et l’argument de H(jw).
(p)H1
E(p) S(p)
2H (p)

Exercices
Asservissement & Régulation Page: 63 Propose par: SOYED-Abdessamï
Exercice 2:
Soit un circuit électrique régit par l’équation différentielle suivante: di 1Ri+L + idt=e(t)dt C .
On suppose que toutes les conditions intiales sont nulles, et on pose: 20
1LC=w
et R Cm=2 L
.
On prend e(t) =10.u(t).
1. Détreminer l’expression du courant I(p), en fonction de (m, R et w0),
2. Pour m =1, R =1 et w0 =1rad/s, en déduire i(0) et i(+),
3. Détreminer l’expression temporelle du courant i(t), et la réprésenter,
4. En deduire le temps et le courant maximum correspondant.
Exercice 3:
1. Trouver la transformée de Laplace des fonctions suivantes, en déduire leurs expressions
temporelles.
f(t)
T
t
E
0
E
t
g(t)
T0
0
E
t
h(t)
T 2T 1.5T
k(t)
t
T
E
0.5E
0

Exercices
Asservissement & Régulation Page: 64 Propose par: SOYED-Abdessamï
Exercice 4:
Soit un processus industriel modélisé par l'équation différentielle suivante: dy2 +y=5udt
1. Etablir la fonction de transfert de ce processus.
2. Donner la réponse de ce processus (conditions initiales nulles) pour une entrée de la forme:
Exercice 5:
On considère un système industriel modélisé par l'équation différentielle suivante:
2
2
d y dy du+6 +9y=8 +8udt dt dt
.
1. Etablir la transformée de Laplace de l’équation précédente,
2. En déduire l'expression de la sortie pour entrée (impulsion de Dirac unitaire), on suppose
que toutes les conditions initiales sont nulles),
3. Retrouver les valeurs initiale et finale de y(t), en appliquant les théorèmes de la valeur
initiale et finale,
4. Etablir et tracer l’allure de y(t), en déduire sa valeur minimale.
0
E=10
T=0.1
t
u(t)
Exercices
Asservissement & Régulation Page: 65 Propose par: SOYED-Abdessamï
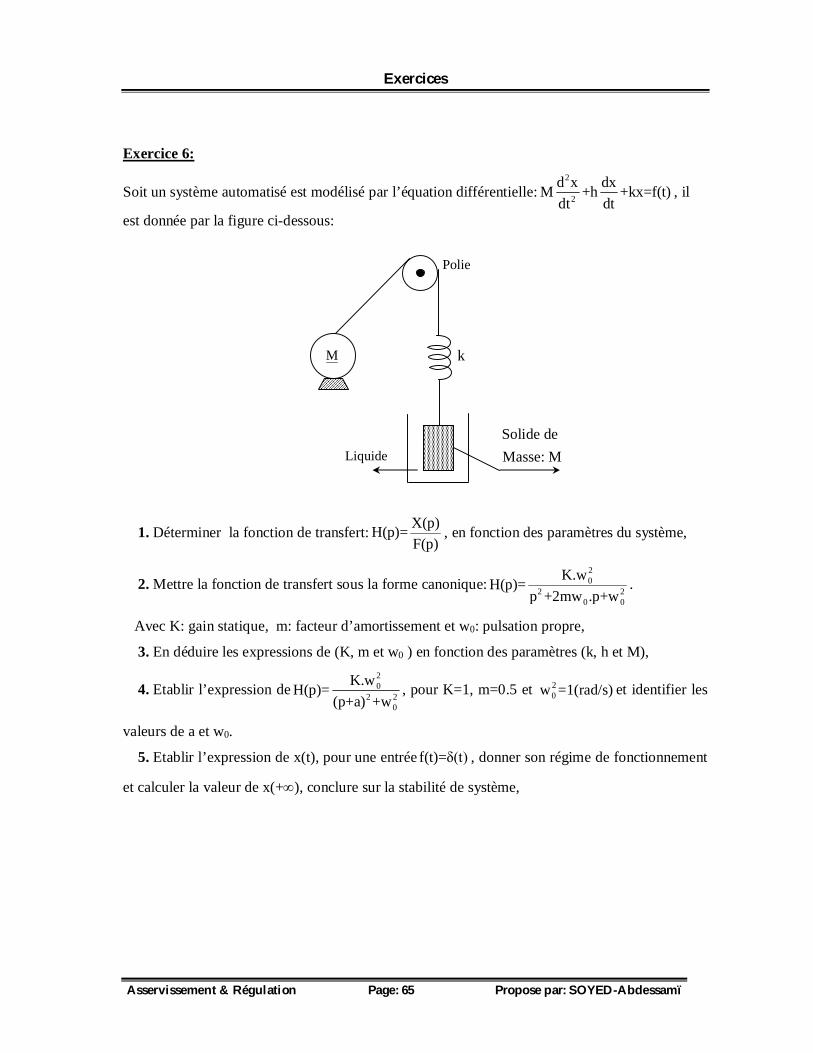
Exercice 6:
Soit un système automatisé est modélisé par l’équation différentielle:2
2
d x dxM +h +kx=f(t)dt dt
, il
est donnée par la figure ci-dessous:
1. Déterminer la fonction de transfert: X(p)H(p)=F(p)
, en fonction des paramètres du système,
2. Mettre la fonction de transfert sous la forme canonique:20
2 20 0
K.wH(p)=p +2mw .p+w
.
Avec K: gain statique, m: facteur d’amortissement et w0: pulsation propre,
3. En déduire les expressions de (K, m et w0 ) en fonction des paramètres (k, h et M),
4. Etablir l’expression de20
2 20
K.wH(p)=(p+a) +w
, pour K=1, m=0.5 et 20w =1(rad/s) et identifier les
valeurs de a et w0.
5. Etablir l’expression de x(t), pour une entrée f(t)=δ(t) , donner son régime de fonctionnement
et calculer la valeur de x(+), conclure sur la stabilité de système,
Polie
k
Solide deMasse: MLiquide
M

Exercices
Asservissement & Régulation Page: 66 Propose par: SOYED-Abdessamï
Le schéma fonctionnel du système en boule fermée est donné par la figure ci dessous:
6. Etablir la transmittance du système en boule fermée:2
B B2 2
B B B
k wT(p)=p +2m w .p+w
,
7. En déduire les paramètres kB, mB et wB en fonction de (K, m et w0).
8. Etablir l’expression de x(t) en boucle fermée pour un échelon f(t)=10.u(t) , en déduire son
allure.
Exercice 7:
Soit un système asservi donné par le schéma fonctionnel suivant:
1. Déterminer l’expression T(p) en boucle fermé,
2. Etablir l’équation caractéristique du système,
3. Etudier la stabilité, en utilisant le critère de Routh,
4. Donner la condition sur pour que le système soit stable.
H(p)
F(p) X(p)
E(p) S(p)
1λ.pp1
2
1p1

Exercices
Asservissement & Régulation Page: 67 Propose par: SOYED-Abdessamï
Exercice 8:
Soit le circuit électrique passif, de la figure ci-dessous. On donne R=1kΩ et C=500μF .
1. Calculer l’expression de la fonction de transfert de ce circuit,
Ce circuit peut être décrit par le schéma fonctionnel de la figure suivante:
2. Calculer alors les expressions des fonctions de transfert F1(p) et F2(p),
Le circuit précédent est excité par le signal suivant:
3. Calculer S(p),
4. En déduire s(t), calculer le temps de stabilisation à 5%.
E(p) S(p)
I(p)
1F (p) 2F (p)
e(t)
E
t
0 T
e s
i R
C

Exercices
Asservissement & Régulation Page: 68 Propose par: SOYED-Abdessamï
Exercice 9:
Soit un système industriel décrit par l’équation différentielle:2
2
d s(t) ds(t)+3 +9s(t)=45e(t)dt dt
.
On note par e(t) et s(t) respectivement l’entrée et la sortie de système. Les conditions initiales
sont nulles,
1. Déterminer la fonction du transfert H(p) du système, en déduire l’ordre du système.
2. Déterminer le gain statique K, le facteur d’amortissement m et la pulsation propre du
système w0.
3. Pour le facteur d’amortissement trouvé, déterminer la nature du système (apériodique,
pseudopériodique etc..).
4. Tracer l’allure s(t) de la réponse indicielle,
5. Déterminer le pseudo période Tp, le 1er dépassement D et le temps de pic tp.
6. Tracer le diagramme de Bode.
Exercice10:
Soit un processus électrique asservi définit par le schéma fonctionnel suivant:
1. Déterminer la fonction de transfert en boucle fermée F(p),
2. En déduire l’équation caractéristique du processus,
3. Etudier la stabilité, en utilisant le critère de Routh,
4. Etablir les conditions sur k, pour que le système soit stable.
3 2
kH(p)=2p +p +3p+1
E(p) S(p)
Eléments de solutions d’Exercices
Asservissement & Régulation Page: 69 Propose par: SOYED-Abdessamï
Eléments de solutions
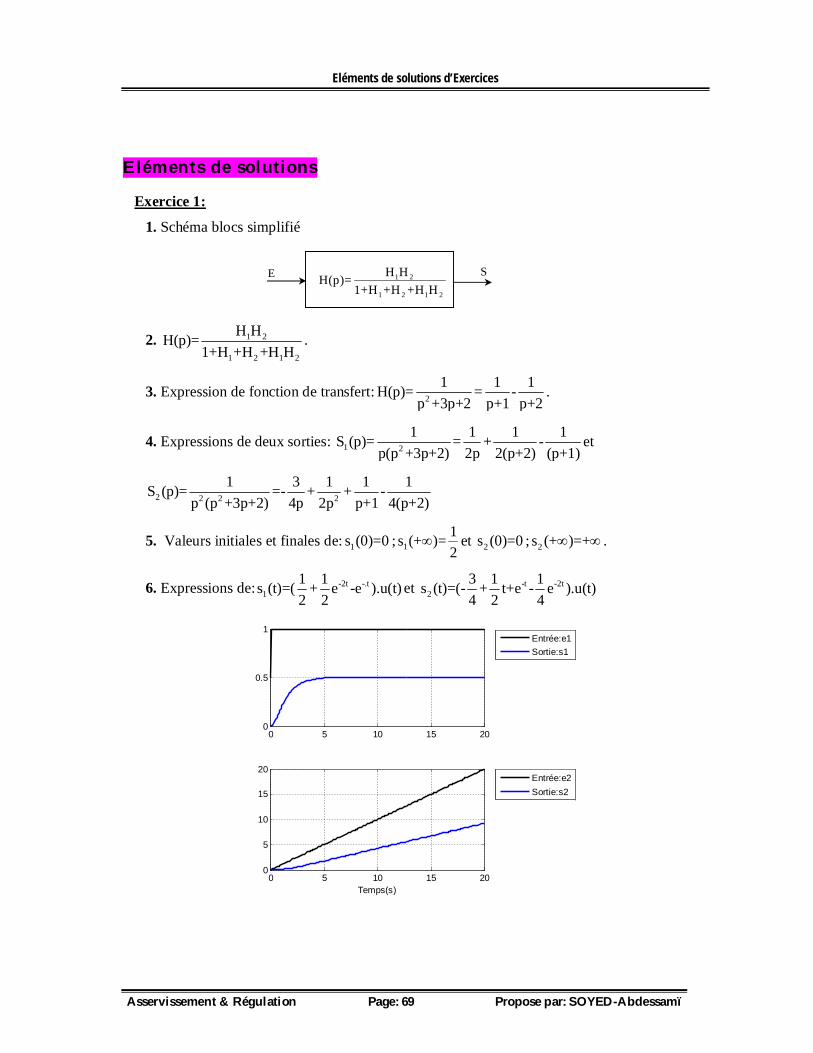
Exercice 1:
1. Schéma blocs simplifié
2. 1 2
1 2 1 2
H HH(p)=1+H +H +H H
.
3. Expression de fonction de transfert: 2
1 1 1H(p)= = -p +3p+2 p+1 p+2
.
4. Expressions de deux sorties: 1 2
1 1 1 1S (p)= = + -p(p +3p+2) 2p 2(p+2) (p+1)
et
2 2 2 2
1 3 1 1 1S (p)= =- + + -p (p +3p+2) 4p 2p p+1 4(p+2)
5. Valeurs initiales et finales de: 1s (0)=0 ; 11s (+ )=2
et 2s (0)=0 ; 2s (+ )=+ .
6. Expressions de: -2t -.t1
1 1s (t)=( + e -e ).u(t)2 2
et -t -2t2
3 1 1s (t)=(- + t+e - e ).u(t)4 2 4
0 5 10 15 200
0.5
1
Entrée:e1Sortie:s1
0 5 10 15 200
5
10
15
20
Temps(s)
Entrée:e2Sortie:s2
E S1 2
1 2 1 2
H HH(p)=1+H +H +H H

Eléments de solutions d’Exercices
Asservissement & Régulation Page: 70 Propose par: SOYED-Abdessamï
7. Module et argument:2 2 2
1H(jw) =(2-w ) +9w
et 23wφ=arg H(jw) =-arctang( )
2-w.
-100
-80
-60
-40
-20
0M
agni
tude
(dB)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
Phas
e (d
eg)
Bode Diagram
Frequency (rad/s) Exercice 2:
1. Expression de courant: 02
0 0
2mw .pI(p)= E(p)R.(1+2mw .p+w )
.
2. 2
2pI(p)= E(p)(p +2p+1)
; i(0) = 0, i(+) = 0.
3. Expression de courant: 2
20I(p)=(p+1)
, d’ou -ti(t)=20te .u(t)
4. Temps et courant maximums: tmax=1s et -1max maxi =i(t )=20e =7.35A .

Eléments de solutions d’Exercices
Asservissement & Régulation Page: 71 Propose par: SOYED-Abdessamï
0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
X: 1.01Y: 7.357
Temps(s)
e:Entréei:Sortie
Exercice 3:
1. Transformée de Laplace de:
-PT
2E (1-e )L f(t) =F(p)= .T p
et Ef(t)= . tu(t)-(t-T)u(t-T)T
-PT -PT
2
E (1-e ) eL g(t) =G(p)= . -E.T p p
et Eg(t)= t.u(t)-(t-T).u(t-T) -E.u(t-T)T
2-PT -PT -2PT
2 2 2E 1-e E 1 2e eL h(t) =H(p)= . = .( - + )T p T P P P
.
Eh(t)= tu(t)-2.(t-T)u(t-T)+(t-2T)u(t-2T)T
L k'(t) =K'(p)=pK(p)-pk(0) , d’ou
3PT--PT -PT -PT2E.(1-e ) E.(e -e ) E.eK'(p)= - -Tp Tp 2
.
On obtient:3PT--PT -PT2
2
E EK(p)= (1-2e +e )- eTp 2P
;
E 3 3 Ek(t)= tu(t)-2(t-T)u(t-T)+(t- T)u(t- T) - (u(t-T)T 2 2 2
Eléments de solutions d’Exercices
Asservissement & Régulation Page: 72 Propose par: SOYED-Abdessamï
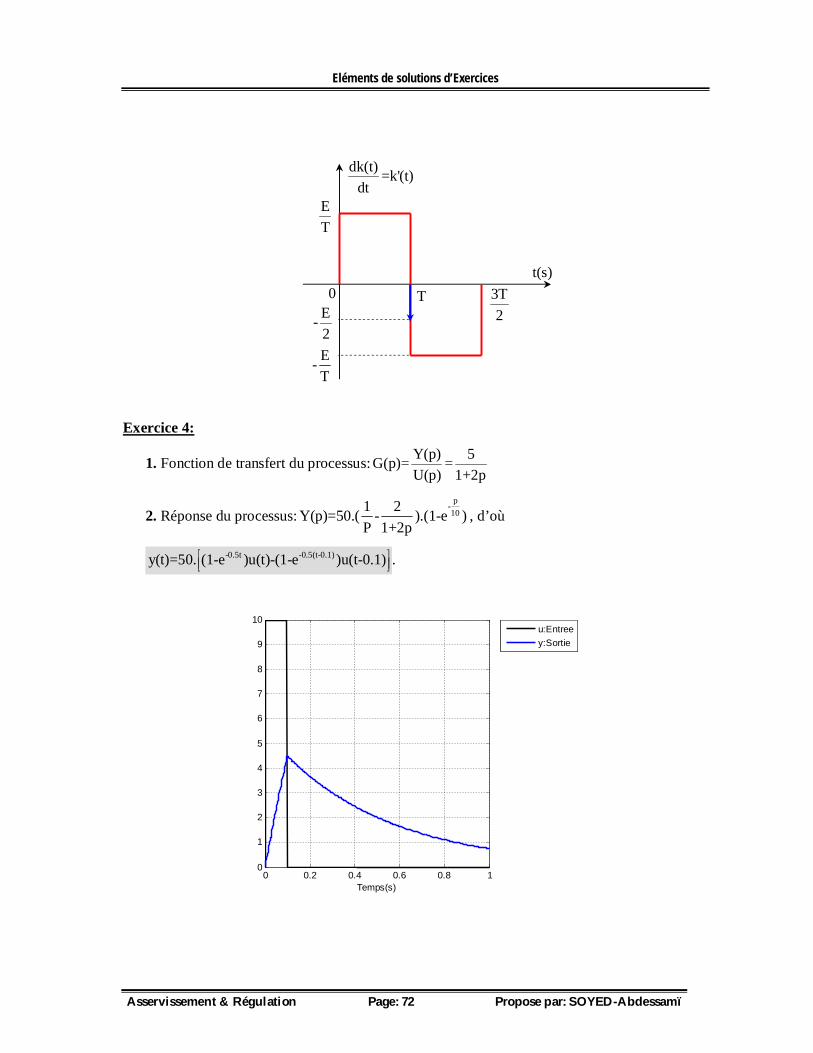
Exercice 4:
1. Fonction de transfert du processus: Y(p) 5G(p)= =U(p) 1+2p
2. Réponse du processus:p-
101 2Y(p)=50.( - ).(1-e )P 1+2p
, d’où
-0.5t -0.5(t-0.1)y(t)=50. (1-e )u(t)-(1-e )u(t-0.1) .
0 0.2 0.4 0.6 0.8 10
1
2
3
4
5
6
7
8
9
10
Temps(s)
u:Entreey:Sortie
ET
E-T
E-2
T 3T2
dk(t) =k'(t)dt
t(s)0

Eléments de solutions d’Exercices
Asservissement & Régulation Page: 73 Propose par: SOYED-Abdessamï
Exercice 5:
1. Fonction de transfert du processus: 2Y(p) 8.(p+1)H(p)= =U(p) (p+3)
.
2. Réponse du procédé à une impulsion unitaire: 21 2Y(p)=H(p).U(p)=8( - )
p+3 (p+3).
3. Valeurs initiale et finale de y(t) :
2
2p p®+¥
8p+8py(0)= lim [p.Y(p)]= lim =8(p+3)
;
+ +
2
2p 0 p 0
8p+8py(+ )= lim [p.Y(p)]= lim =0(p+3)
.
4. Expression et allure de -3ty(t)=8e (1-2t).u(t) .
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
0
1
2
3
4
5
6
7
8
X: 0.77Y: -0.4288
Temps(s)
y:Sortie
miny(t) =-0.46 , pour 1t =0.77
Exercice 6:
1. Fonction de transfert : 21H(p)=
Mp +hp+k
2. Expression de20
2 20 0
K.wH(p)=p +2mw .p+w
, avec 01 h kK= ; m= et w =k M2 M.k
.
3. Expression de20
2 20 0
K.wX(p)=p +2mw .p+w
.

Eléments de solutions d’Exercices
Asservissement & Régulation Page: 74 Propose par: SOYED-Abdessamï
4. Pour K=1, w0=1 et m=0.5, l’expression devient
22 2 2
31 1 2 2X(p)= = = .1 3p +p+1 3 1 3(p+ ) + (p+ ) +( )2 4 2 2
5. Expression temporelle det-22 3x(t)= e .sin( t)
23, pour f(t)=δ(t)
6. Réponse Impulsionnelle de x (t):
0 5 10 15-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Temps(s)
y:Sortie
Ce régime est appelé pseudopériodique, le système est stable car ( x(+ )=0 ).
7. Fonction de transfert en boucle fermée: 2 20 B B
2 2 2 2 20 0 0 B B B
K.w K .wT(p)= =p +2mw .p+K.w +w p +2m w .p+w
.
8. B B 0 BK 1 m 1K = = ; w =w 1+K = 2 et m = =
1+K 2 1+K 2 2, d’où la fonction de transfert en
boucle fermée: 2
1T(p)=p +p+2
.
Eléments de solutions d’Exercices
Asservissement & Régulation Page: 75 Propose par: SOYED-Abdessamï
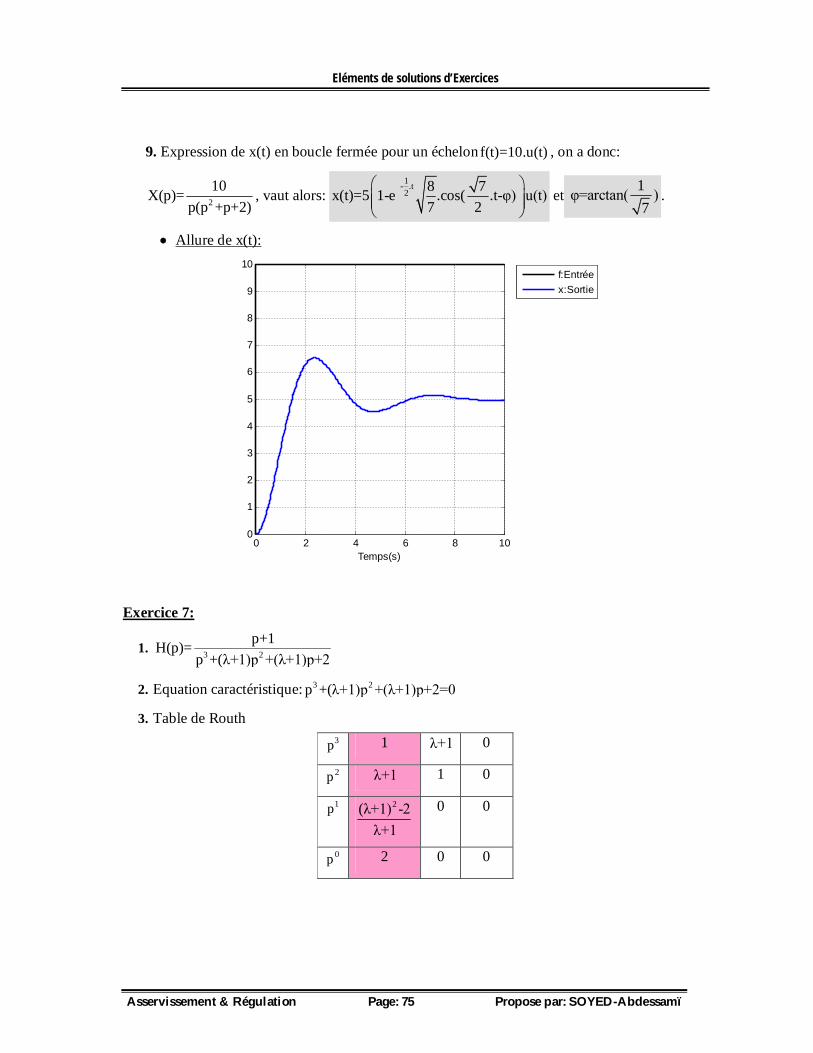
9. Expression de x(t) en boucle fermée pour un échelon f(t)=10.u(t) , on a donc:
2
10X(p)=p(p +p+2)
, vaut alors: 1- .t2 8 7x(t)=5 1-e .cos( .t-φ) u(t)
7 2
et 1 φ=arctan( )7
.
Allure de x(t):
0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
Temps(s)
f:Entréex:Sortie
Exercice 7:
1. 3 2p+1H(p)=
p +(λ+1)p +(λ+1)p+2
2. Equation caractéristique: 3 2p +(λ+1)p +(λ+1)p+2=0
3. Table de Routh
3p 1 λ+1 0
2p λ+1 1 0
1p 2(λ+1) -2λ+1
0 0
0p 2 0 0
Eléments de solutions d’Exercices
Asservissement & Régulation Page: 76 Propose par: SOYED-Abdessamï
4. Conditions de stabilité
2
λ+1>0λ>-1+ 2
λ+1) -2>2
Exercice 8:
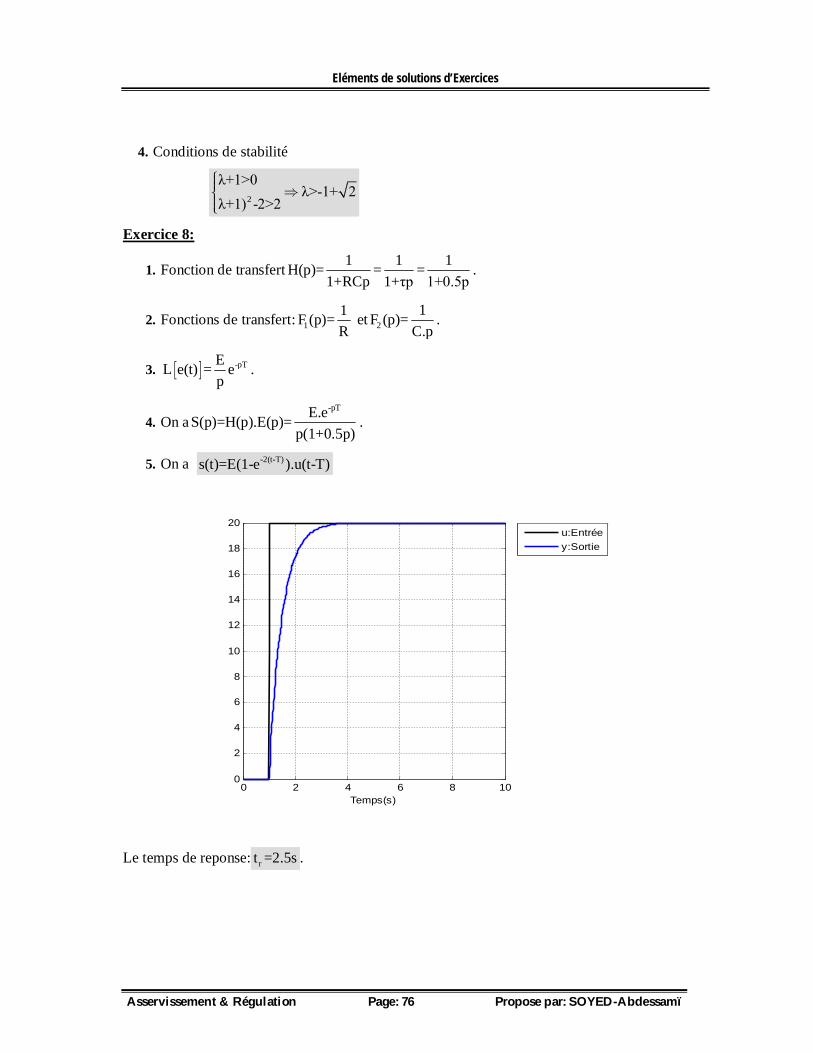
1. Fonction de transfert 1 1 1H(p)= = =1+RCp 1+τp 1+0.5p
.
2. Fonctions de transfert: 11F (p)=R
et 21F (p)=
C.p.
3. -pTEL e(t) = ep
.
4. On a-pTE.eS(p)=H(p).E(p)=
p(1+0.5p).
5. On a -2(t-T)s(t)=E(1-e ).u(t-T)
0 2 4 6 8 100
2
4
6
8
10
12
14
16
18
20
Temps(s)
u:Entréey:Sortie
Le temps de reponse: rt =2.5s .
Eléments de solutions d’Exercices
Asservissement & Régulation Page: 77 Propose par: SOYED-Abdessamï
Exercice 9:
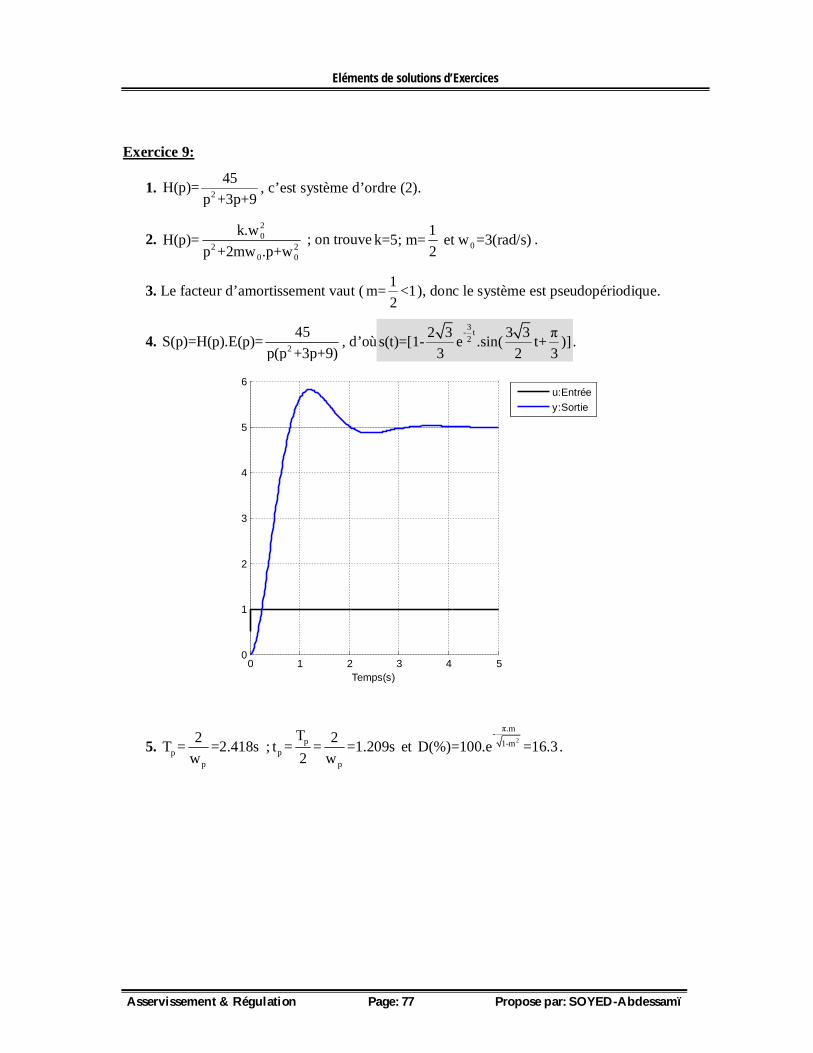
1. 245H(p)=
p +3p+9, c’est système d’ordre (2).
2. 20
2 20 0
k.wH(p)=p +2mw .p+w
; on trouve 01k=5; m= et w =3(rad/s)2
.
3. Le facteur d’amortissement vaut ( 1m= <12
), donc le système est pseudopériodique.
4. 2
45S(p)=H(p).E(p)=p(p +3p+9)
, d’où3- t22 3 3 3 πs(t)=[1- e .sin( t+ )]
3 2 3.
0 1 2 3 4 50
1
2
3
4
5
6
Temps(s)
u:Entréey:Sortie
5. pp
2T = =2.418sw
; pp
p
T 2t = = =1.209s2 w
et 2
π.m-1-mD(%)=100.e =16.3 .

Eléments de solutions d’Exercices
Asservissement & Régulation Page: 78 Propose par: SOYED-Abdessamï
6. Diagramme de Bode.
10-1
100
101
102
-60
-40
-20
0
20
G(d
B)
10-1 100 101 102-200
-150
-100
-50
0
(°)
(rad/s) Exercice 10:
1. F3 2
F
Num (p) kF(p)= =Den (p) 2p +p +3p+k+1
.
2. L’équation caractéristique est obtenue par: 3 2FD (p)=2p +p +3p+k+1=0 .
3. Table de Routh
Les conditions de stabilité sur k pour que le système soit sont fournies par:1-2k>0 10 k<k+1>0 2
.
3p 2 3 0
2p 1 k+1 0
1p 1-2.k 0 0
0p k+1 0 0
Eléments de solutions d’Exercices
Asservissement & Régulation Page: 79 Propose par: SOYED-Abdessamï
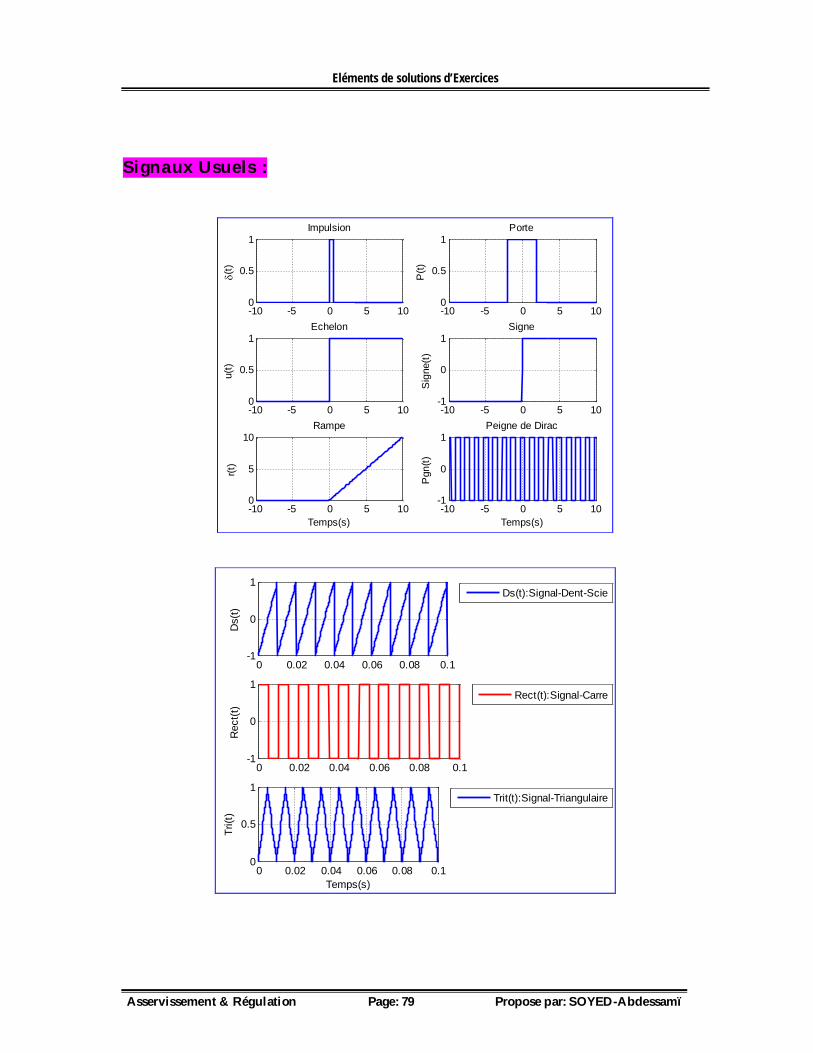
Signaux Usuels :
-10 -5 0 5 100
0.5
1(
t)Impulsion
-10 -5 0 5 100
0.5
1
u(t)
Echelon
-10 -5 0 5 100
5
10
r(t)
Rampe
Temps(s)
-10 -5 0 5 100
0.5
1
P(t)
Porte
-10 -5 0 5 10-1
0
1
Sig
ne(t)
Signe
-10 -5 0 5 10-1
0
1P
gn(t)
Peigne de Dirac
Temps(s)
0 0.02 0.04 0.06 0.08 0.1-1
0
1
Ds(
t)
Ds(t):Signal-Dent-Scie
0 0.02 0.04 0.06 0.08 0.1-1
0
1
Rec
t(t)
Rect(t):Signal-Carre
0 0.02 0.04 0.06 0.08 0.10
0.5
1
Tri(t
)
Temps(s)
Trit(t):Signal-Triangulaire

Bibliographie
Asservissement & Régulation Page: 80 Propose par: SOYED-Abdessamï
Bibliographie
[1] P. Codron et S. Le Ballois. Automatique, systèmes linéaires et continus Dunod (1998).
[2] F. Manneville et S. Esquieu. Systèmes bouclés linéaires Dunod.