capteur - cahier de prépa · codeur de position optique magnétique incrémental absolu capteur...
TRANSCRIPT
PRINCIPAUX CAPTEURS Un capteur est un objet technique de prélèvement de l’information qui réalise une mesure du contenu informationnel d’une grandeur physique. Sa fonction globale est de convertir une grandeur physique à mesurer en une autre grandeur physique, ac-cessible aux sens humains ou adaptée pour être transmise par un réseau à un sys-tème de traitement de l’information (grandeur électrique). La tendance actuelle est d’associer directement au niveau du capteur des éléments assurant l’adaptation de la grandeur physique de sortie (image de l’information me-surée). On parle alors d’intégration ou de « capteur intelligent ».
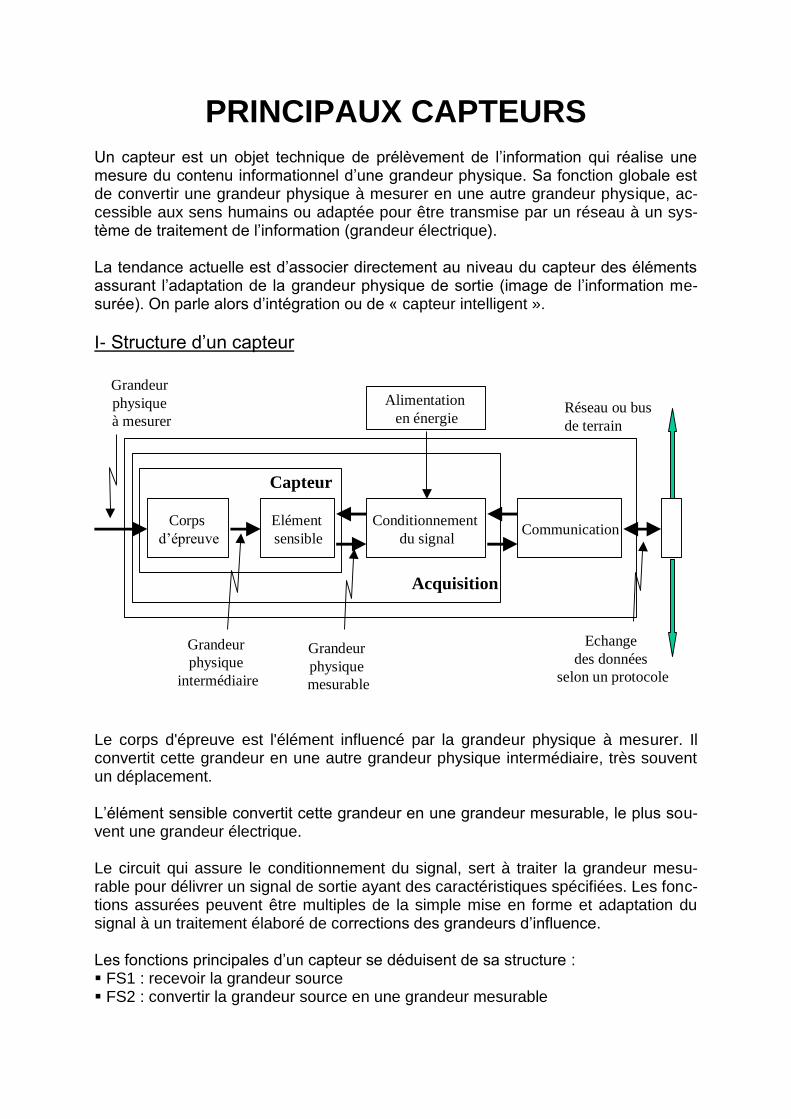
I- Structure d’un capteur
Corps
d’épreuve
Elément
sensible
Grandeur
physique
à mesurer
Conditionnement
du signalCommunication
Grandeur
physique
intermédiaire
Grandeur
physique
mesurable
Capteur
Acquisition
Alimentation
en énergieRéseau ou bus
de terrain
Echange
des données
selon un protocole
Le corps d'épreuve est l'élément influencé par la grandeur physique à mesurer. Il convertit cette grandeur en une autre grandeur physique intermédiaire, très souvent un déplacement. L’élément sensible convertit cette grandeur en une grandeur mesurable, le plus sou-vent une grandeur électrique. Le circuit qui assure le conditionnement du signal, sert à traiter la grandeur mesu-rable pour délivrer un signal de sortie ayant des caractéristiques spécifiées. Les fonc-tions assurées peuvent être multiples de la simple mise en forme et adaptation du signal à un traitement élaboré de corrections des grandeurs d’influence. Les fonctions principales d’un capteur se déduisent de sa structure : FS1 : recevoir la grandeur source FS2 : convertir la grandeur source en une grandeur mesurable
Principaux capteurs 2
_________________________________________________________________________________________
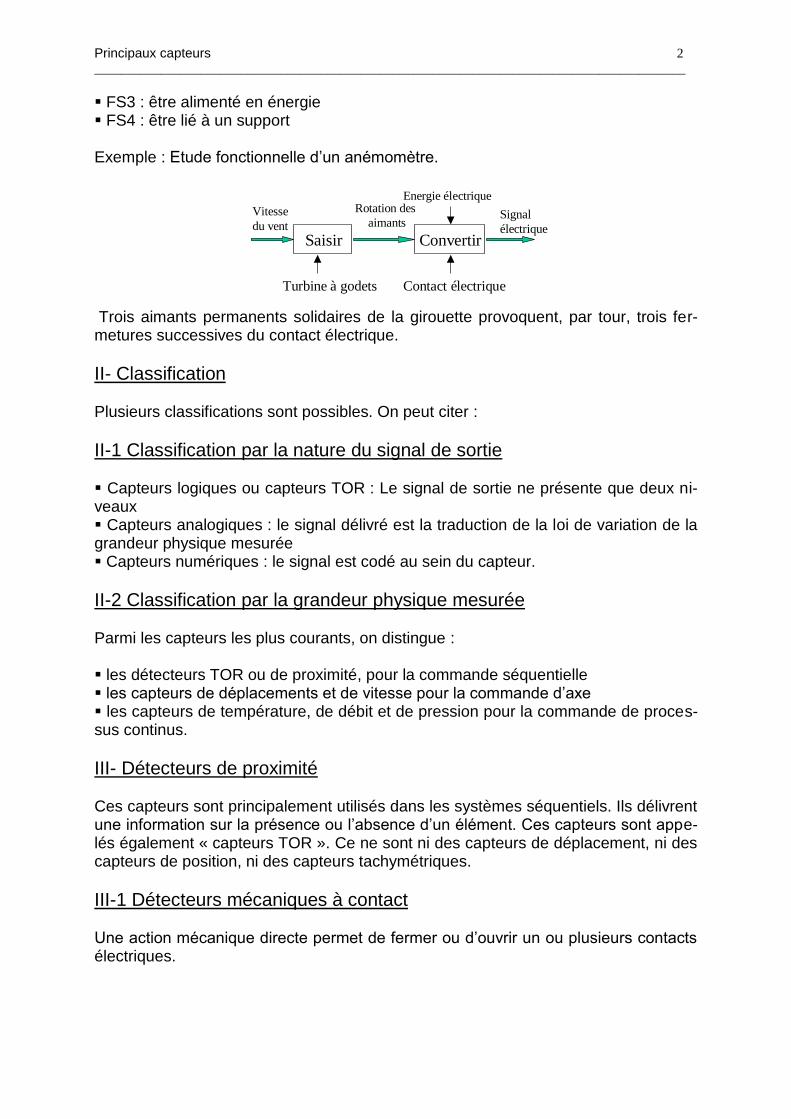
FS3 : être alimenté en énergie FS4 : être lié à un support Exemple : Etude fonctionnelle d’un anémomètre.
Saisir Convertir
Energie électrique
Contact électriqueTurbine à godets
Vitesse
du ventSignal
électrique
Rotation des
aimants
Trois aimants permanents solidaires de la girouette provoquent, par tour, trois fer-metures successives du contact électrique.
II- Classification Plusieurs classifications sont possibles. On peut citer :
II-1 Classification par la nature du signal de sortie Capteurs logiques ou capteurs TOR : Le signal de sortie ne présente que deux ni-veaux Capteurs analogiques : le signal délivré est la traduction de la loi de variation de la grandeur physique mesurée Capteurs numériques : le signal est codé au sein du capteur.
II-2 Classification par la grandeur physique mesurée Parmi les capteurs les plus courants, on distingue : les détecteurs TOR ou de proximité, pour la commande séquentielle les capteurs de déplacements et de vitesse pour la commande d’axe les capteurs de température, de débit et de pression pour la commande de proces-sus continus.
III- Détecteurs de proximité Ces capteurs sont principalement utilisés dans les systèmes séquentiels. Ils délivrent une information sur la présence ou l’absence d’un élément. Ces capteurs sont appe-lés également « capteurs TOR ». Ce ne sont ni des capteurs de déplacement, ni des capteurs de position, ni des capteurs tachymétriques.
III-1 Détecteurs mécaniques à contact Une action mécanique directe permet de fermer ou d’ouvrir un ou plusieurs contacts électriques.
Principaux capteurs 3
_________________________________________________________________________________________
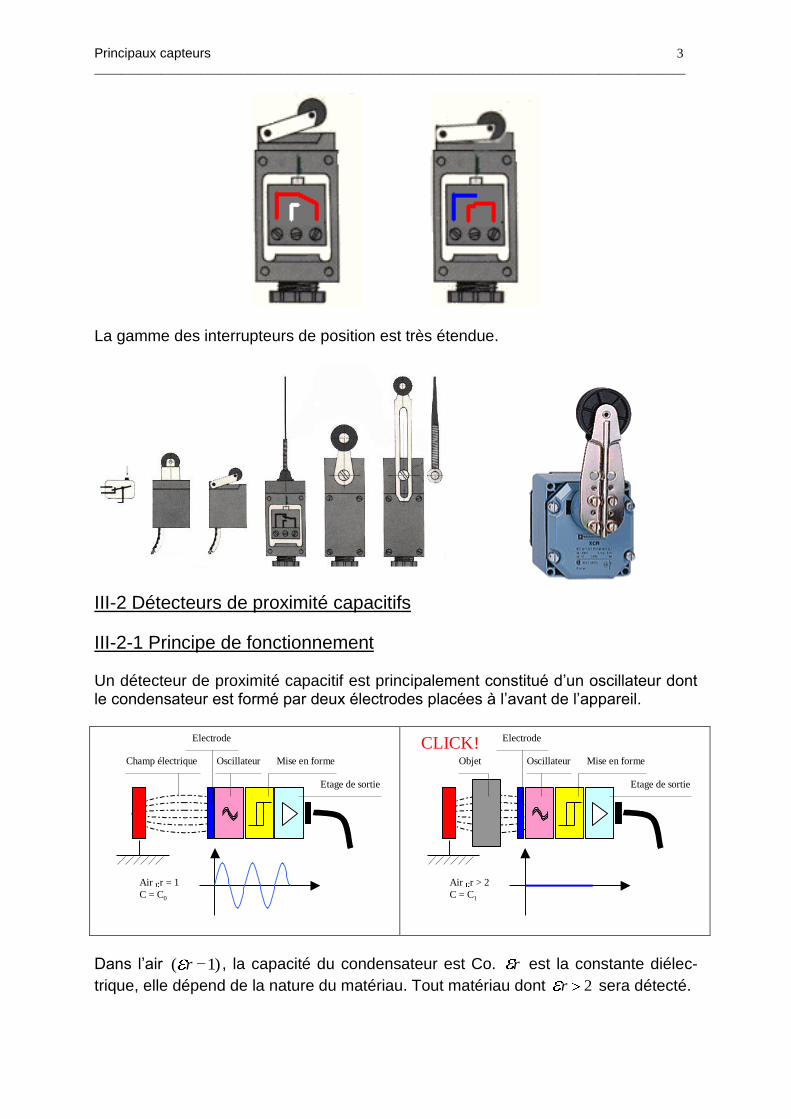
La gamme des interrupteurs de position est très étendue.
III-2 Détecteurs de proximité capacitifs
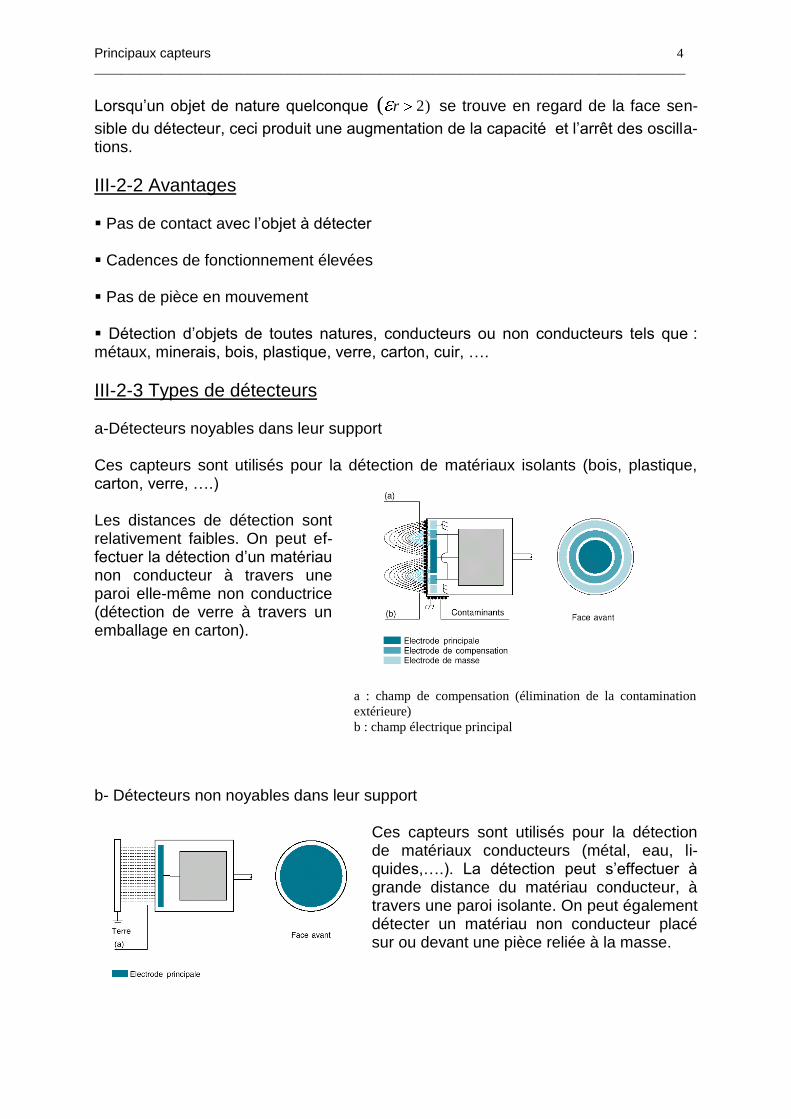
III-2-1 Principe de fonctionnement Un détecteur de proximité capacitif est principalement constitué d’un oscillateur dont le condensateur est formé par deux électrodes placées à l’avant de l’appareil.
Oscillateur Mise en forme
Etage de sortie
Champ électrique
Air r = 1
C = C0
Electrode
Oscillateur Mise en forme
Etage de sortie
Air r > 2
C = C1
Electrode
Objet
CLICK!
Dans l’air )1( r , la capacité du condensateur est Co. r est la constante diélec-
trique, elle dépend de la nature du matériau. Tout matériau dont 2r sera détecté.
Principaux capteurs 4
_________________________________________________________________________________________
Lorsqu’un objet de nature quelconque )2( r se trouve en regard de la face sen-
sible du détecteur, ceci produit une augmentation de la capacité et l’arrêt des oscilla-tions.
III-2-2 Avantages Pas de contact avec l’objet à détecter Cadences de fonctionnement élevées Pas de pièce en mouvement Détection d’objets de toutes natures, conducteurs ou non conducteurs tels que : métaux, minerais, bois, plastique, verre, carton, cuir, ….
III-2-3 Types de détecteurs a-Détecteurs noyables dans leur support Ces capteurs sont utilisés pour la détection de matériaux isolants (bois, plastique, carton, verre, ….) Les distances de détection sont relativement faibles. On peut ef-fectuer la détection d’un matériau non conducteur à travers une paroi elle-même non conductrice (détection de verre à travers un emballage en carton). b- Détecteurs non noyables dans leur support
Ces capteurs sont utilisés pour la détection de matériaux conducteurs (métal, eau, li-quides,….). La détection peut s’effectuer à grande distance du matériau conducteur, à travers une paroi isolante. On peut également détecter un matériau non conducteur placé sur ou devant une pièce reliée à la masse.
a : champ de compensation (élimination de la contamination
extérieure)
b : champ électrique principal
Principaux capteurs 5
_________________________________________________________________________________________
III-3 Détecteurs de proximité inductifs
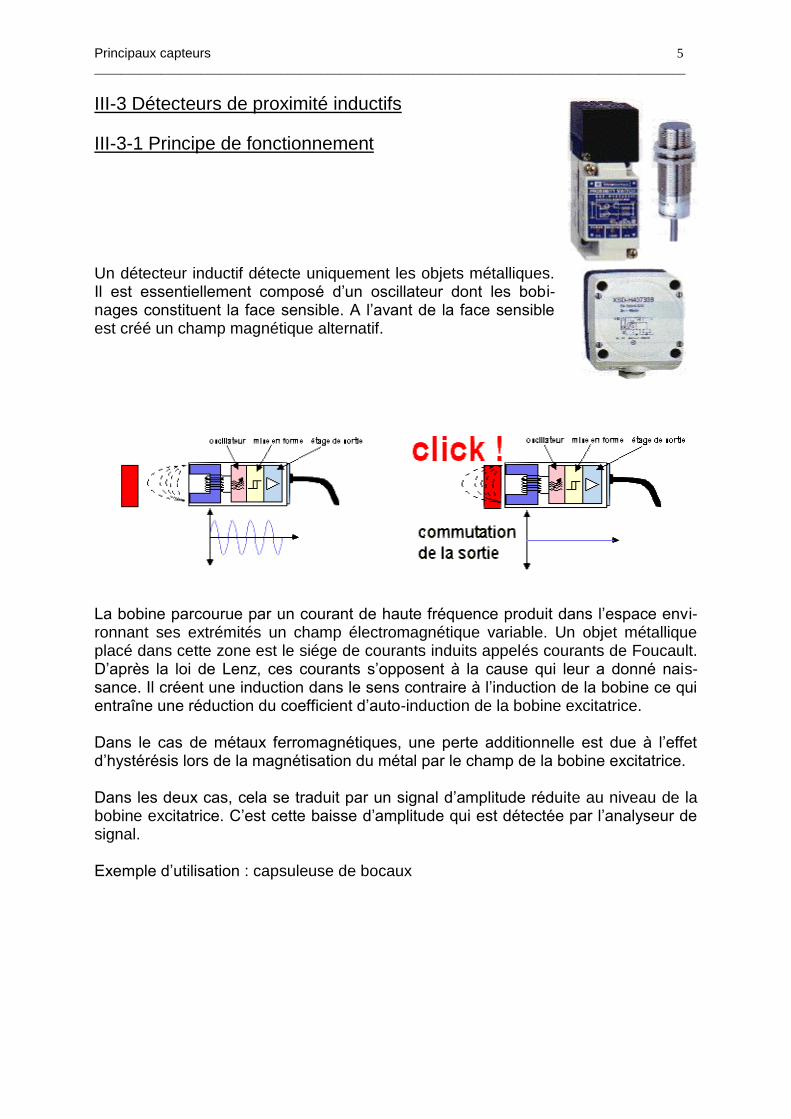
III-3-1 Principe de fonctionnement Un détecteur inductif détecte uniquement les objets métalliques. Il est essentiellement composé d’un oscillateur dont les bobi-nages constituent la face sensible. A l’avant de la face sensible est créé un champ magnétique alternatif.
La bobine parcourue par un courant de haute fréquence produit dans l’espace envi-ronnant ses extrémités un champ électromagnétique variable. Un objet métallique placé dans cette zone est le siége de courants induits appelés courants de Foucault. D’après la loi de Lenz, ces courants s’opposent à la cause qui leur a donné nais-sance. Il créent une induction dans le sens contraire à l’induction de la bobine ce qui entraîne une réduction du coefficient d’auto-induction de la bobine excitatrice. Dans le cas de métaux ferromagnétiques, une perte additionnelle est due à l’effet d’hystérésis lors de la magnétisation du métal par le champ de la bobine excitatrice. Dans les deux cas, cela se traduit par un signal d’amplitude réduite au niveau de la bobine excitatrice. C’est cette baisse d’amplitude qui est détectée par l’analyseur de signal. Exemple d’utilisation : capsuleuse de bocaux
Principaux capteurs 6
_________________________________________________________________________________________
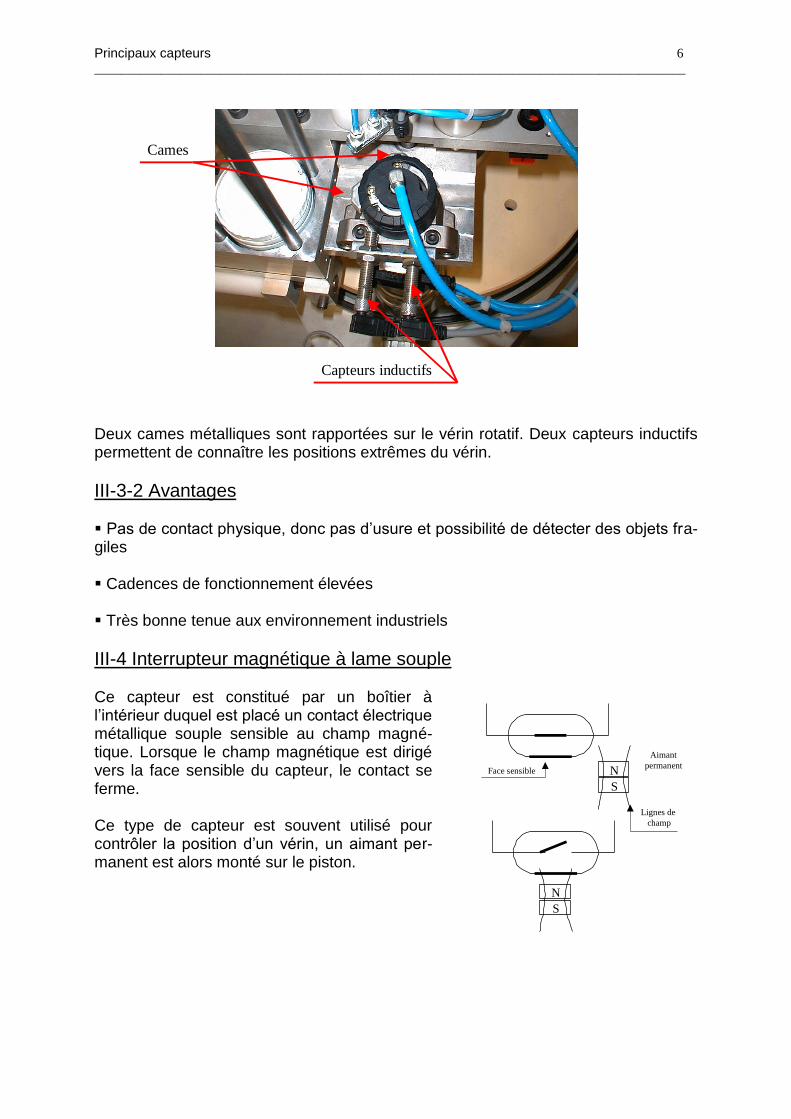
Cames
Capteurs inductifs
Deux cames métalliques sont rapportées sur le vérin rotatif. Deux capteurs inductifs permettent de connaître les positions extrêmes du vérin.
III-3-2 Avantages Pas de contact physique, donc pas d’usure et possibilité de détecter des objets fra-giles Cadences de fonctionnement élevées Très bonne tenue aux environnement industriels
III-4 Interrupteur magnétique à lame souple Ce capteur est constitué par un boîtier à l’intérieur duquel est placé un contact électrique métallique souple sensible au champ magné-tique. Lorsque le champ magnétique est dirigé vers la face sensible du capteur, le contact se ferme.
Ce type de capteur est souvent utilisé pour contrôler la position d’un vérin, un aimant per-manent est alors monté sur le piston.
N
S
Face sensible
N
S
Aimant
permanent
Lignes de
champ
Principaux capteurs 7
_________________________________________________________________________________________
Capteur Capteur
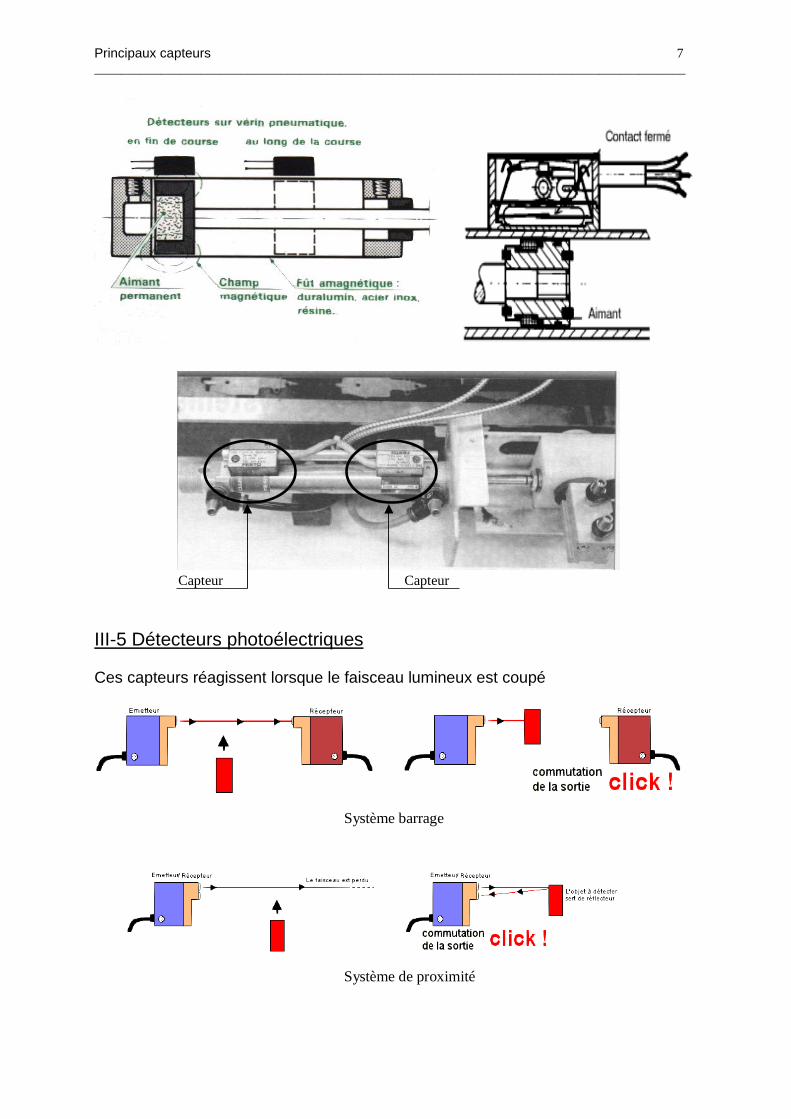
III-5 Détecteurs photoélectriques Ces capteurs réagissent lorsque le faisceau lumineux est coupé
Système barrage
Système de proximité
Principaux capteurs 8
_________________________________________________________________________________________
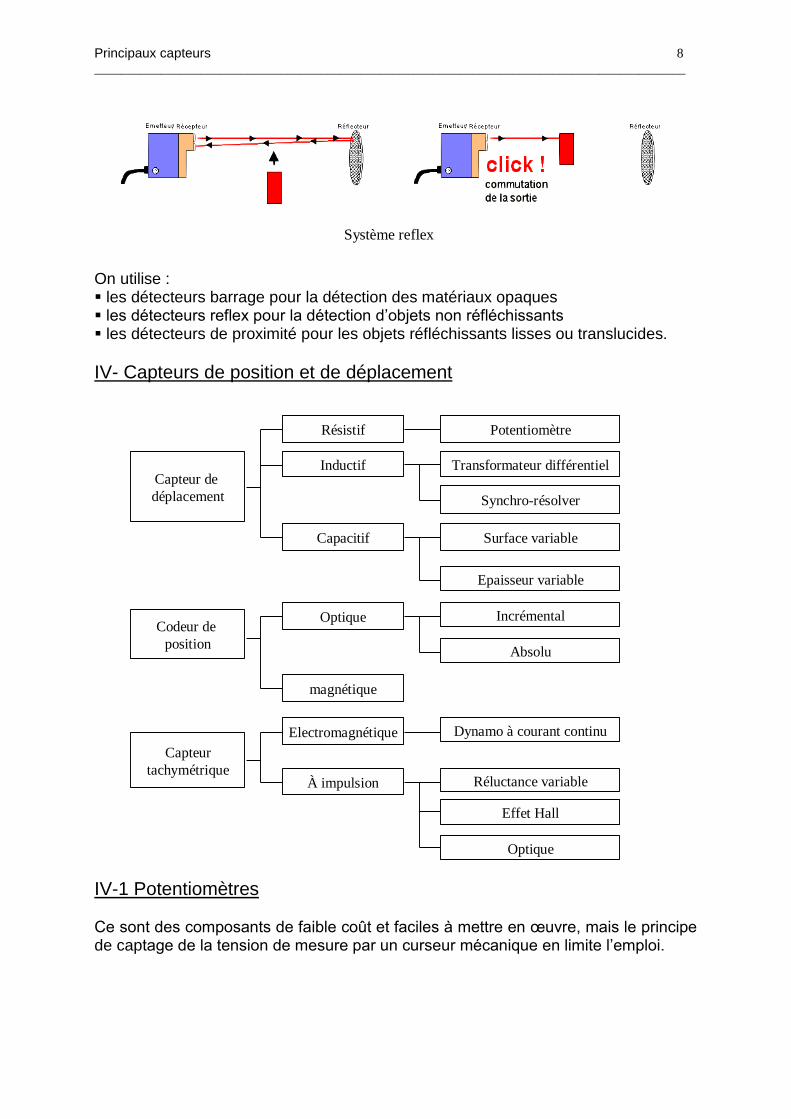
Système reflex
On utilise : les détecteurs barrage pour la détection des matériaux opaques les détecteurs reflex pour la détection d’objets non réfléchissants les détecteurs de proximité pour les objets réfléchissants lisses ou translucides.
IV- Capteurs de position et de déplacement
Capteur de
déplacement
Résistif Potentiomètre
Inductif
Capacitif
Transformateur différentiel
Synchro-résolver
Surface variable
Epaisseur variable
Codeur de
position
Optique
magnétique
Incrémental
Absolu
Capteur
tachymétrique
Electromagnétique
À impulsion
Dynamo à courant continu
Réluctance variable
Effet Hall
Optique
IV-1 Potentiomètres Ce sont des composants de faible coût et faciles à mettre en œuvre, mais le principe de captage de la tension de mesure par un curseur mécanique en limite l’emploi.
Principaux capteurs 9
_________________________________________________________________________________________
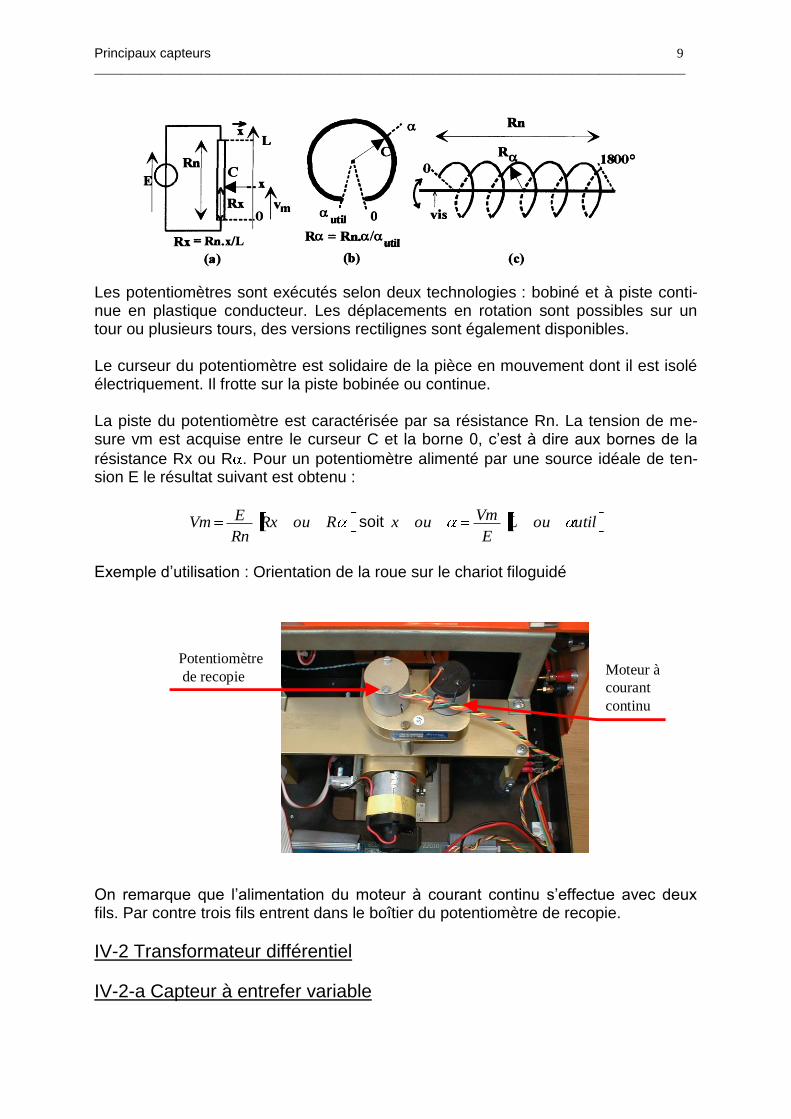
Les potentiomètres sont exécutés selon deux technologies : bobiné et à piste conti-nue en plastique conducteur. Les déplacements en rotation sont possibles sur un tour ou plusieurs tours, des versions rectilignes sont également disponibles. Le curseur du potentiomètre est solidaire de la pièce en mouvement dont il est isolé électriquement. Il frotte sur la piste bobinée ou continue. La piste du potentiomètre est caractérisée par sa résistance Rn. La tension de me-sure vm est acquise entre le curseur C et la borne 0, c’est à dire aux bornes de la
résistance Rx ou R . Pour un potentiomètre alimenté par une source idéale de ten-sion E le résultat suivant est obtenu :
RouRxRn
EVm soit utilouLE
Vmoux
Exemple d’utilisation : Orientation de la roue sur le chariot filoguidé
Potentiomètre
de recopieMoteur à
courant
continu
On remarque que l’alimentation du moteur à courant continu s’effectue avec deux fils. Par contre trois fils entrent dans le boîtier du potentiomètre de recopie.
IV-2 Transformateur différentiel
IV-2-a Capteur à entrefer variable
Principaux capteurs 10
_________________________________________________________________________________________
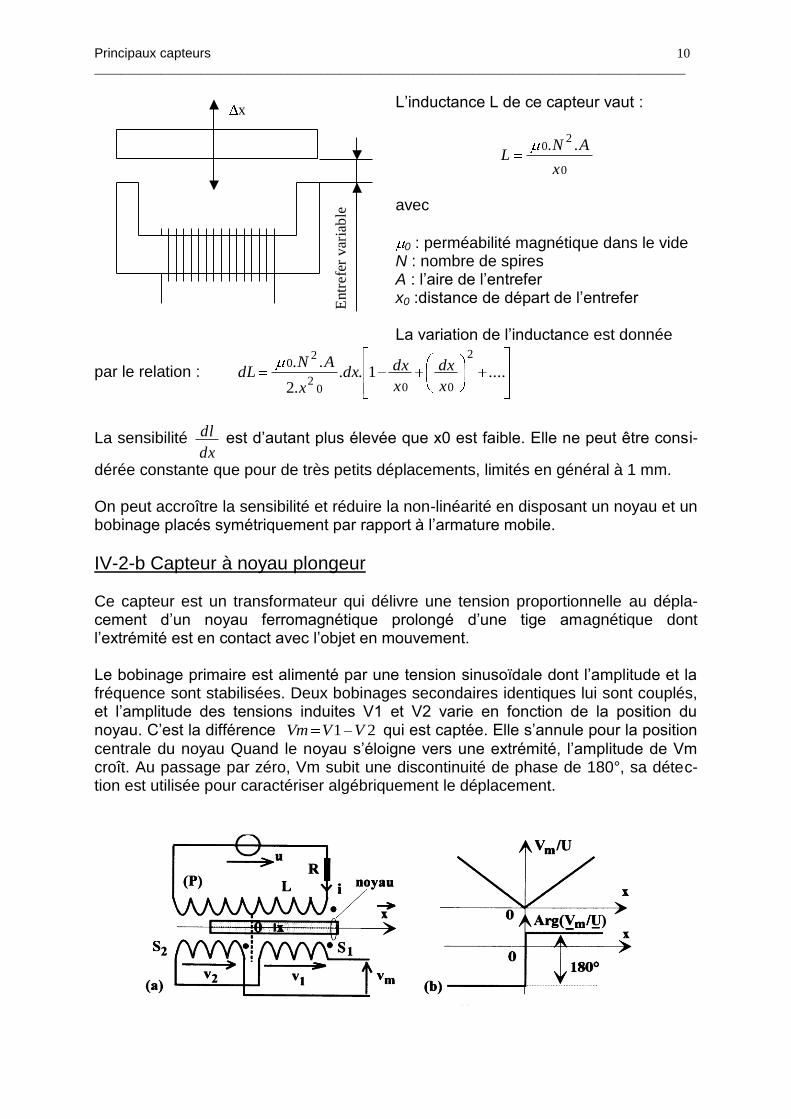
L’inductance L de ce capteur vaut :
0
20 ..
x
ANL
avec
0 : perméabilité magnétique dans le vide N : nombre de spires A : l’aire de l’entrefer x0 :distance de départ de l’entrefer La variation de l’inductance est donnée
par le relation : ....1...2
..2
0002
20
x
dx
x
dxdxx
ANdL
La sensibilité dx
dl est d’autant plus élevée que x0 est faible. Elle ne peut être consi-
dérée constante que pour de très petits déplacements, limités en général à 1 mm. On peut accroître la sensibilité et réduire la non-linéarité en disposant un noyau et un bobinage placés symétriquement par rapport à l’armature mobile.
IV-2-b Capteur à noyau plongeur Ce capteur est un transformateur qui délivre une tension proportionnelle au dépla-cement d’un noyau ferromagnétique prolongé d’une tige amagnétique dont l’extrémité est en contact avec l’objet en mouvement. Le bobinage primaire est alimenté par une tension sinusoïdale dont l’amplitude et la fréquence sont stabilisées. Deux bobinages secondaires identiques lui sont couplés, et l’amplitude des tensions induites V1 et V2 varie en fonction de la position du noyau. C’est la différence 21 VVVm qui est captée. Elle s’annule pour la position
centrale du noyau Quand le noyau s’éloigne vers une extrémité, l’amplitude de Vm croît. Au passage par zéro, Vm subit une discontinuité de phase de 180°, sa détec-tion est utilisée pour caractériser algébriquement le déplacement.
Entr
efe
r v
aria
ble
x
Principaux capteurs 11
_________________________________________________________________________________________
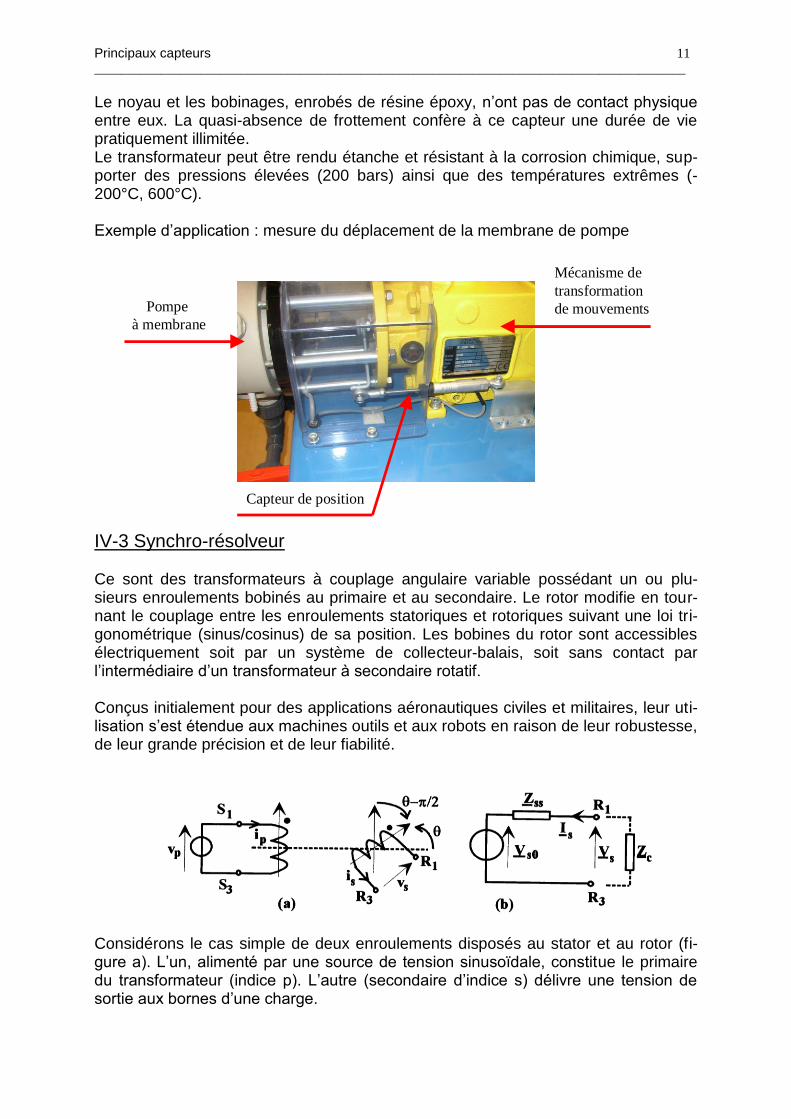
Le noyau et les bobinages, enrobés de résine époxy, n’ont pas de contact physique entre eux. La quasi-absence de frottement confère à ce capteur une durée de vie pratiquement illimitée. Le transformateur peut être rendu étanche et résistant à la corrosion chimique, sup-porter des pressions élevées (200 bars) ainsi que des températures extrêmes (-200°C, 600°C). Exemple d’application : mesure du déplacement de la membrane de pompe
Pompe
à membrane
Mécanisme de
transformation
de mouvements
Capteur de position
IV-3 Synchro-résolveur Ce sont des transformateurs à couplage angulaire variable possédant un ou plu-sieurs enroulements bobinés au primaire et au secondaire. Le rotor modifie en tour-nant le couplage entre les enroulements statoriques et rotoriques suivant une loi tri-gonométrique (sinus/cosinus) de sa position. Les bobines du rotor sont accessibles électriquement soit par un système de collecteur-balais, soit sans contact par l’intermédiaire d’un transformateur à secondaire rotatif. Conçus initialement pour des applications aéronautiques civiles et militaires, leur uti-lisation s’est étendue aux machines outils et aux robots en raison de leur robustesse, de leur grande précision et de leur fiabilité.
Considérons le cas simple de deux enroulements disposés au stator et au rotor (fi-gure a). L’un, alimenté par une source de tension sinusoïdale, constitue le primaire du transformateur (indice p). L’autre (secondaire d’indice s) délivre une tension de sortie aux bornes d’une charge.
Principaux capteurs 12
_________________________________________________________________________________________
La figure b indique la source de tension équivalente vue des bornes de sortie.
ssZ est l’impédance du secondaire lorsque le primaire est en court-circuit (Vp = 0) et
la tension au secondaire a pour valeur efficace sin..00 VpKVs .
Une synchro-machine est caractérisée par trois bobinages identiques. Un résolveur comporte deux enroulements identiques mais séparés, en quadrature spatiale.
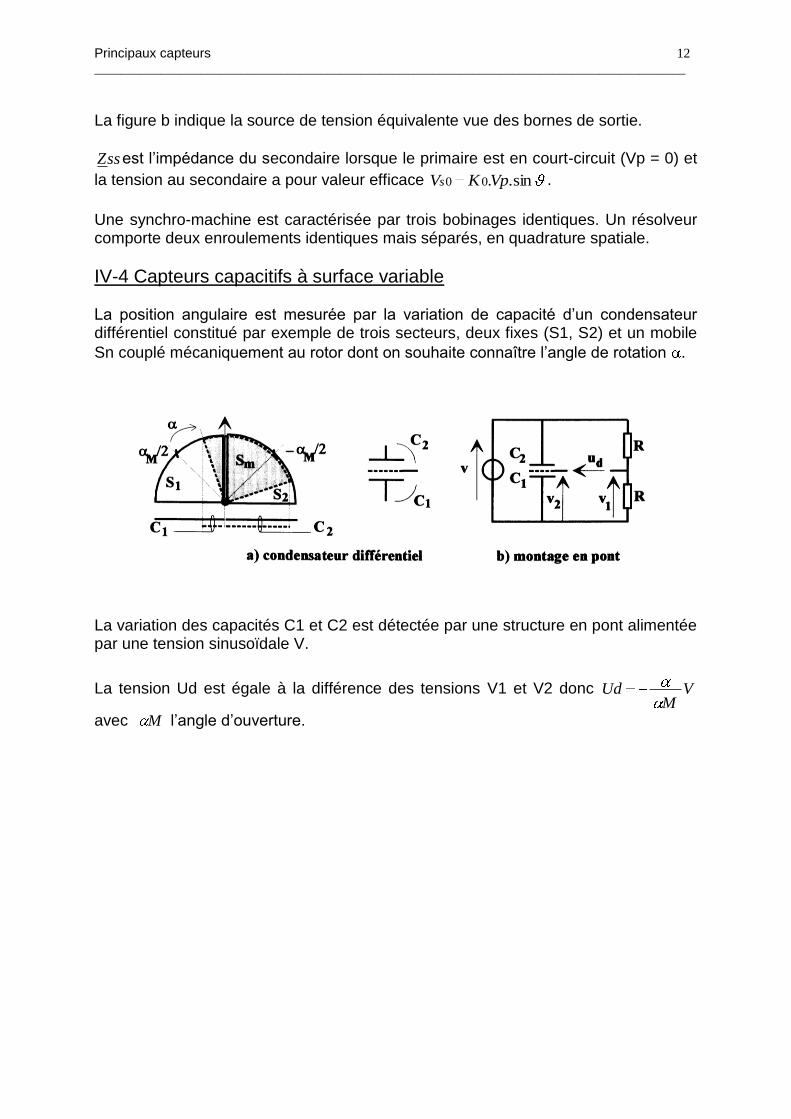
IV-4 Capteurs capacitifs à surface variable La position angulaire est mesurée par la variation de capacité d’un condensateur différentiel constitué par exemple de trois secteurs, deux fixes (S1, S2) et un mobile
Sn couplé mécaniquement au rotor dont on souhaite connaître l’angle de rotation .
La variation des capacités C1 et C2 est détectée par une structure en pont alimentée par une tension sinusoïdale V.
La tension Ud est égale à la différence des tensions V1 et V2 donc VM
Ud
avec M l’angle d’ouverture.
Principaux capteurs 13
_________________________________________________________________________________________
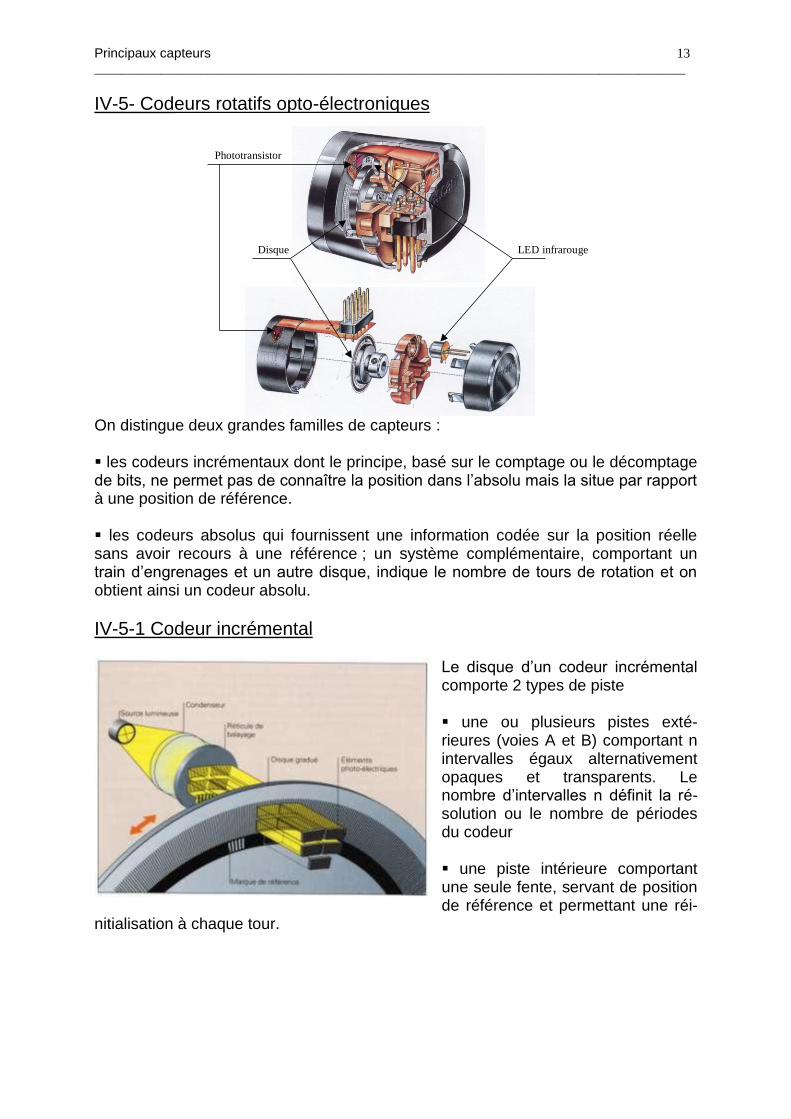
IV-5- Codeurs rotatifs opto-électroniques
LED infrarougeDisque
Phototransistor
On distingue deux grandes familles de capteurs : les codeurs incrémentaux dont le principe, basé sur le comptage ou le décomptage de bits, ne permet pas de connaître la position dans l’absolu mais la situe par rapport à une position de référence. les codeurs absolus qui fournissent une information codée sur la position réelle sans avoir recours à une référence ; un système complémentaire, comportant un train d’engrenages et un autre disque, indique le nombre de tours de rotation et on obtient ainsi un codeur absolu.
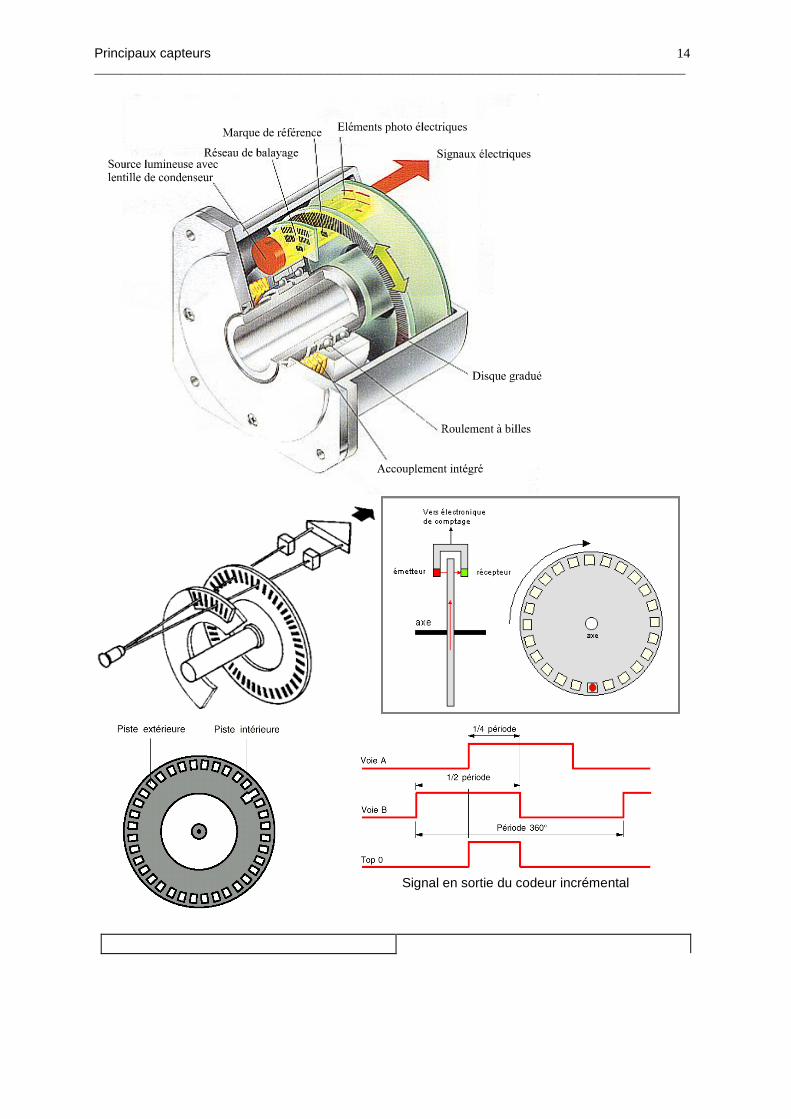
IV-5-1 Codeur incrémental
Le disque d’un codeur incrémental comporte 2 types de piste une ou plusieurs pistes exté-rieures (voies A et B) comportant n intervalles égaux alternativement opaques et transparents. Le nombre d’intervalles n définit la ré-solution ou le nombre de périodes du codeur une piste intérieure comportant une seule fente, servant de position de référence et permettant une réi-
nitialisation à chaque tour.
Principaux capteurs 14
_________________________________________________________________________________________
Signal en sortie du codeur incrémental
Principaux capteurs 15
_________________________________________________________________________________________
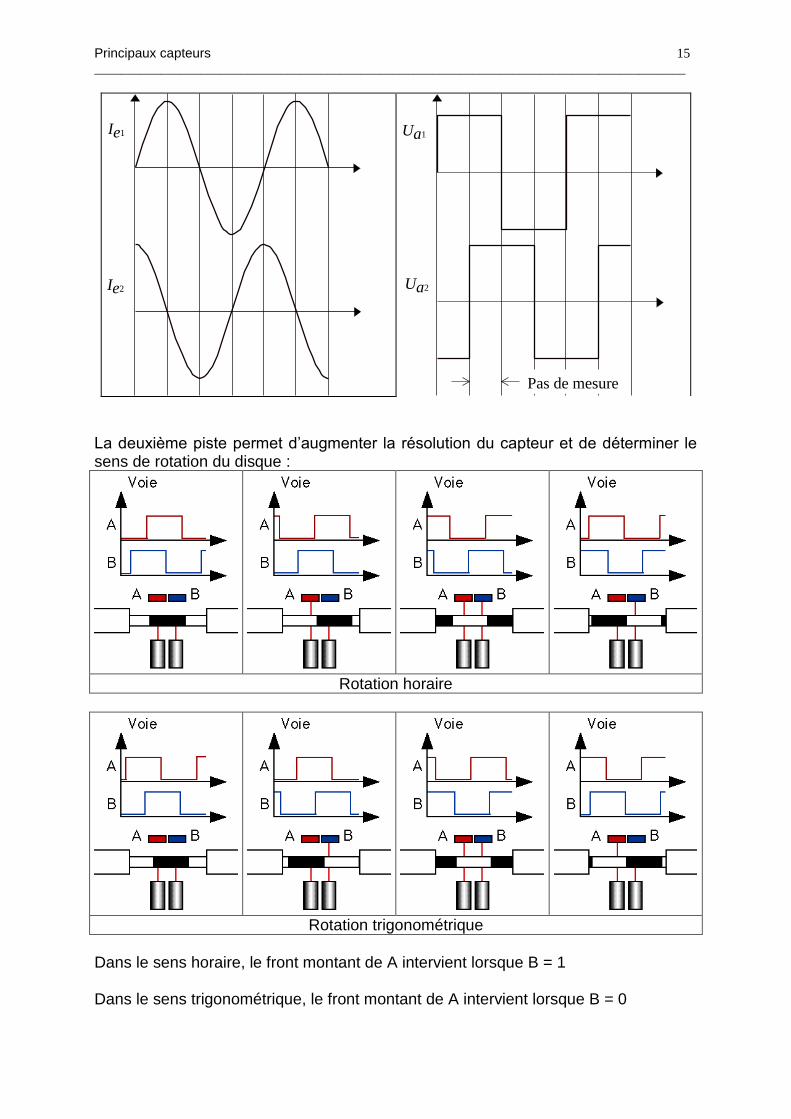
Ie2
Ie1
Ua2
Ua1
Pas de mesure
La deuxième piste permet d’augmenter la résolution du capteur et de déterminer le sens de rotation du disque :
Rotation horaire
Rotation trigonométrique
Dans le sens horaire, le front montant de A intervient lorsque B = 1 Dans le sens trigonométrique, le front montant de A intervient lorsque B = 0
Principaux capteurs 16
_________________________________________________________________________________________
L’utilisation d’un codeur incrémental nécessite la mise à zéro du compteur à sa mise sous tension. Pour connaître le déplacement angulaire , on compte le nombre d’impulsions et on le multiplie par le pas. Pour connaître la vitesse angulaire, on compte pendant un temps imparti le nombre d’impulsions que l’on multiple par le pas et que l’on divise par le temps. Lors d’une panne électrique, l’information de position est perdue. Il faut effectuer une initialisation du système.
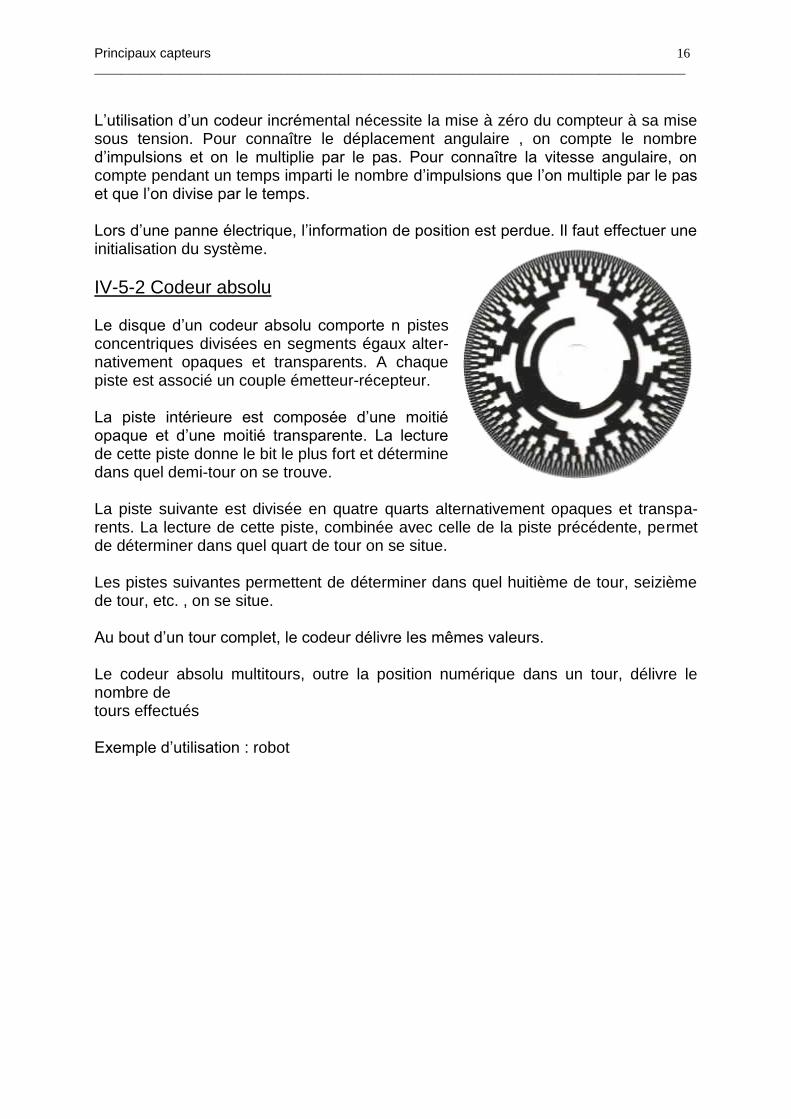
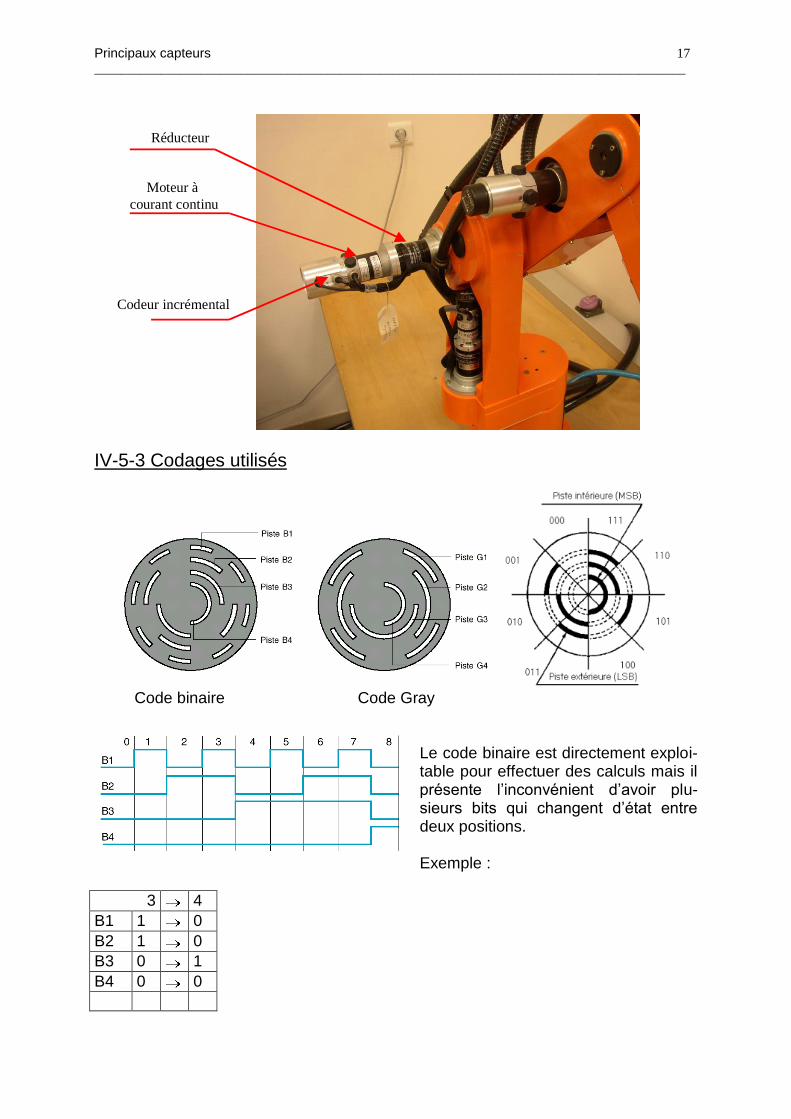
IV-5-2 Codeur absolu Le disque d’un codeur absolu comporte n pistes concentriques divisées en segments égaux alter-nativement opaques et transparents. A chaque piste est associé un couple émetteur-récepteur. La piste intérieure est composée d’une moitié opaque et d’une moitié transparente. La lecture de cette piste donne le bit le plus fort et détermine dans quel demi-tour on se trouve. La piste suivante est divisée en quatre quarts alternativement opaques et transpa-rents. La lecture de cette piste, combinée avec celle de la piste précédente, permet de déterminer dans quel quart de tour on se situe. Les pistes suivantes permettent de déterminer dans quel huitième de tour, seizième de tour, etc. , on se situe. Au bout d’un tour complet, le codeur délivre les mêmes valeurs. Le codeur absolu multitours, outre la position numérique dans un tour, délivre le nombre de tours effectués Exemple d’utilisation : robot
Principaux capteurs 17
_________________________________________________________________________________________
Moteur à
courant continu
Réducteur
Codeur incrémental
IV-5-3 Codages utilisés
Code binaire Code Gray
Le code binaire est directement exploi-table pour effectuer des calculs mais il présente l’inconvénient d’avoir plu-sieurs bits qui changent d’état entre deux positions. Exemple :
3 4
B1 1 0
B2 1 0
B3 0 1
B4 0 0
Principaux capteurs 18
_________________________________________________________________________________________
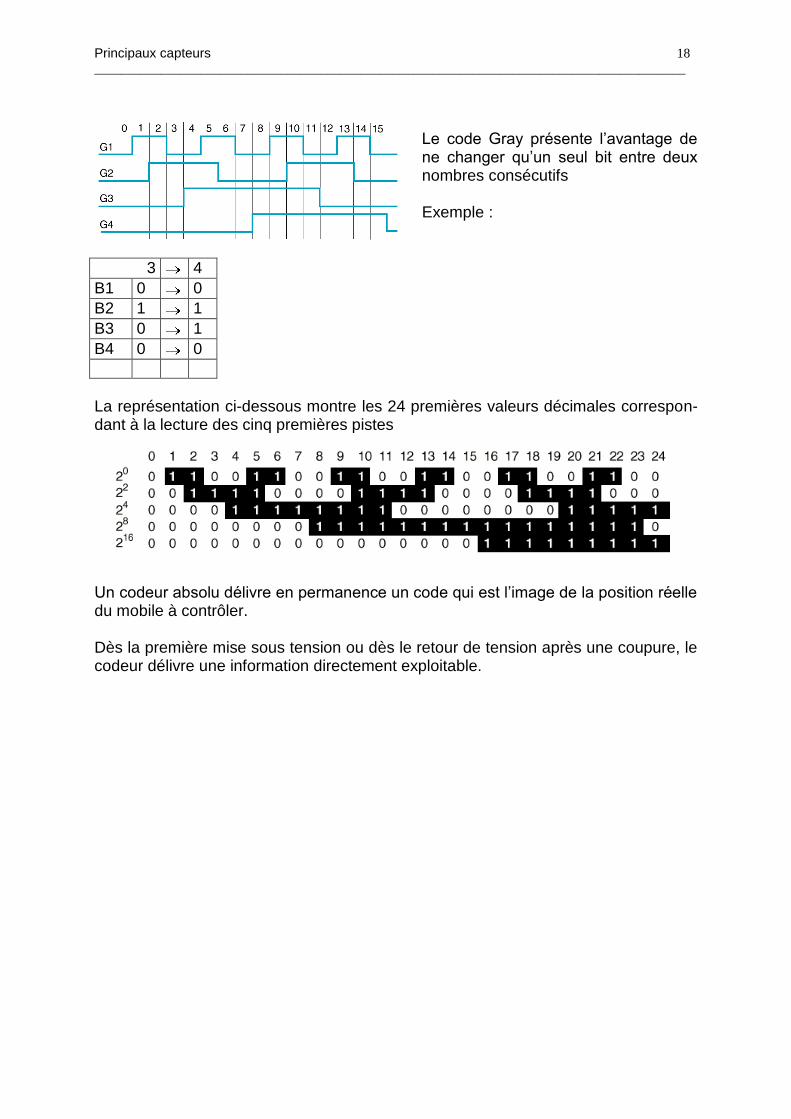
Le code Gray présente l’avantage de ne changer qu’un seul bit entre deux nombres consécutifs Exemple :
3 4
B1 0 0
B2 1 1
B3 0 1
B4 0 0
La représentation ci-dessous montre les 24 premières valeurs décimales correspon-dant à la lecture des cinq premières pistes
Un codeur absolu délivre en permanence un code qui est l’image de la position réelle du mobile à contrôler. Dès la première mise sous tension ou dès le retour de tension après une coupure, le codeur délivre une information directement exploitable.
Principaux capteurs 19
_________________________________________________________________________________________
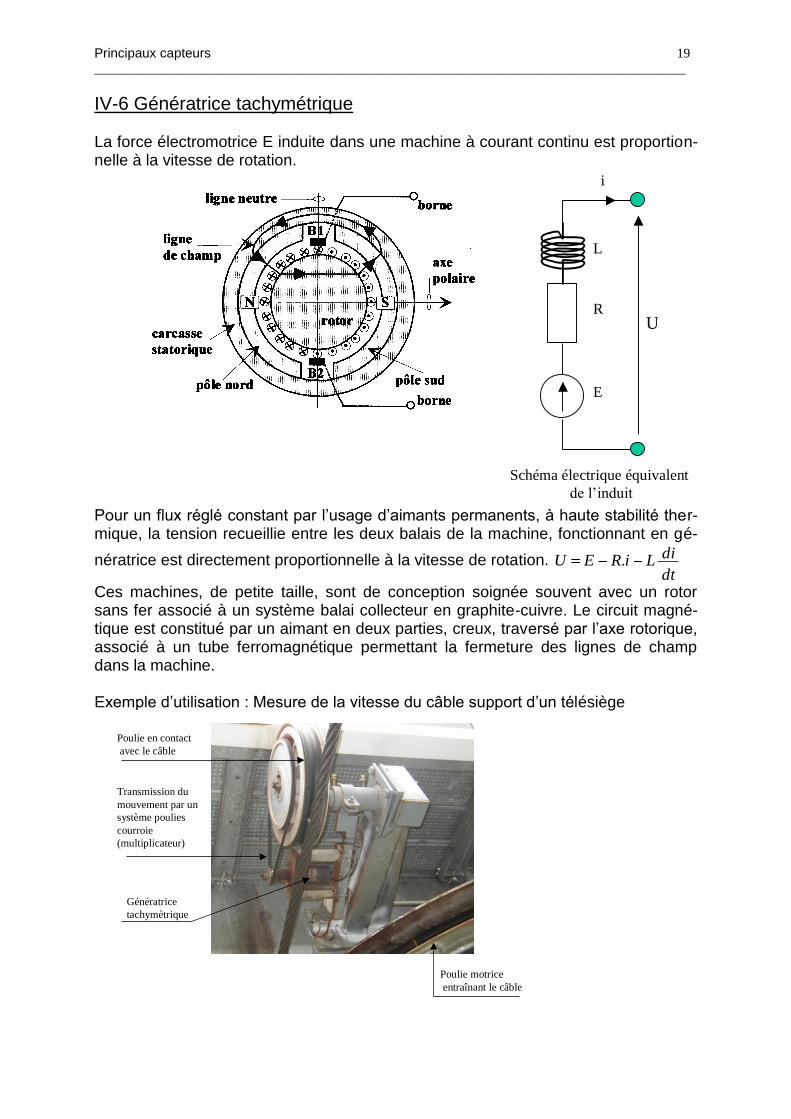
IV-6 Génératrice tachymétrique La force électromotrice E induite dans une machine à courant continu est proportion-nelle à la vitesse de rotation.
E
U
i
R
L
Schéma électrique équivalent
de l’induit
Pour un flux réglé constant par l’usage d’aimants permanents, à haute stabilité ther-mique, la tension recueillie entre les deux balais de la machine, fonctionnant en gé-
nératrice est directement proportionnelle à la vitesse de rotation. dt
diLiREU .
Ces machines, de petite taille, sont de conception soignée souvent avec un rotor sans fer associé à un système balai collecteur en graphite-cuivre. Le circuit magné-tique est constitué par un aimant en deux parties, creux, traversé par l’axe rotorique, associé à un tube ferromagnétique permettant la fermeture des lignes de champ dans la machine. Exemple d’utilisation : Mesure de la vitesse du câble support d’un télésiège
Poulie motrice
entraînant le câble
Poulie en contact
avec le câble
Génératrice
tachymètrique
Transmission du
mouvement par un
système poulies
courroie
(multiplicateur)
Principaux capteurs 20
_________________________________________________________________________________________
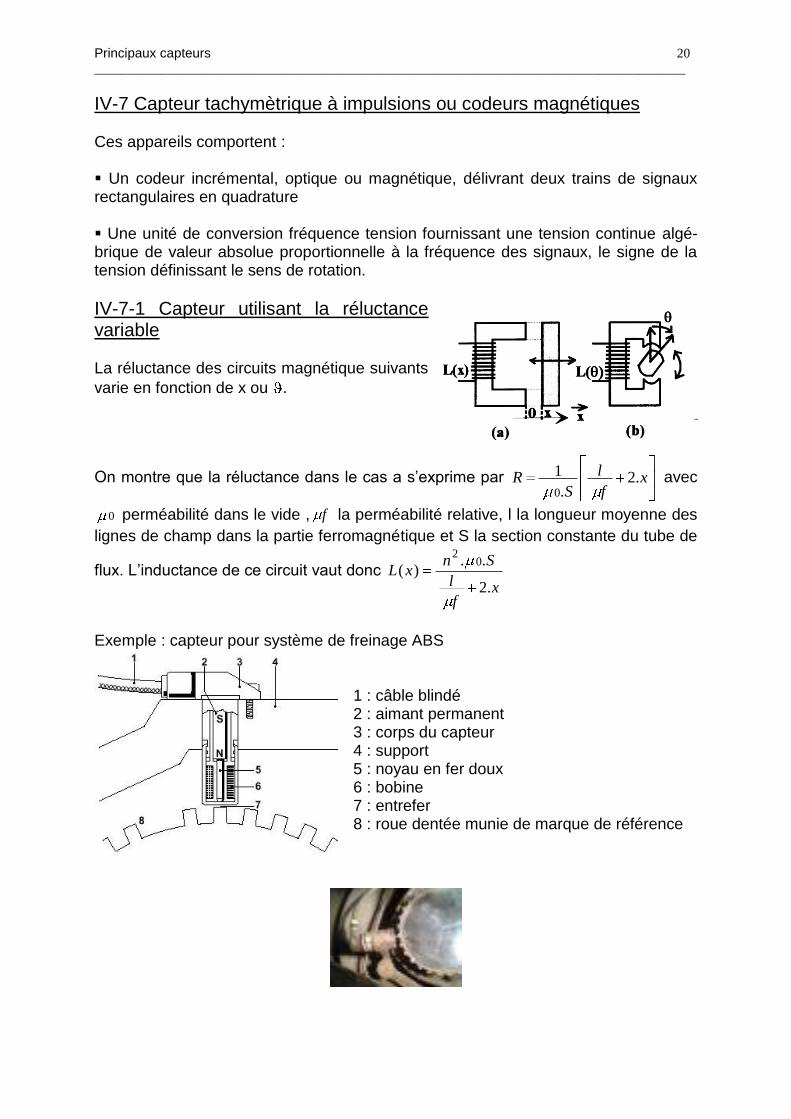
IV-7 Capteur tachymètrique à impulsions ou codeurs magnétiques Ces appareils comportent : Un codeur incrémental, optique ou magnétique, délivrant deux trains de signaux rectangulaires en quadrature Une unité de conversion fréquence tension fournissant une tension continue algé-brique de valeur absolue proportionnelle à la fréquence des signaux, le signe de la tension définissant le sens de rotation.
IV-7-1 Capteur utilisant la réluctance variable La réluctance des circuits magnétique suivants
varie en fonction de x ou .
On montre que la réluctance dans le cas a s’exprime par xf
l
SR .2
.
1
0
avec
0 perméabilité dans le vide , f la perméabilité relative, l la longueur moyenne des
lignes de champ dans la partie ferromagnétique et S la section constante du tube de
flux. L’inductance de ce circuit vaut donc x
f
l
SnxL
.2
..)(
02
Exemple : capteur pour système de freinage ABS
1 : câble blindé 2 : aimant permanent 3 : corps du capteur 4 : support 5 : noyau en fer doux 6 : bobine 7 : entrefer 8 : roue dentée munie de marque de référence
Principaux capteurs 21
_________________________________________________________________________________________
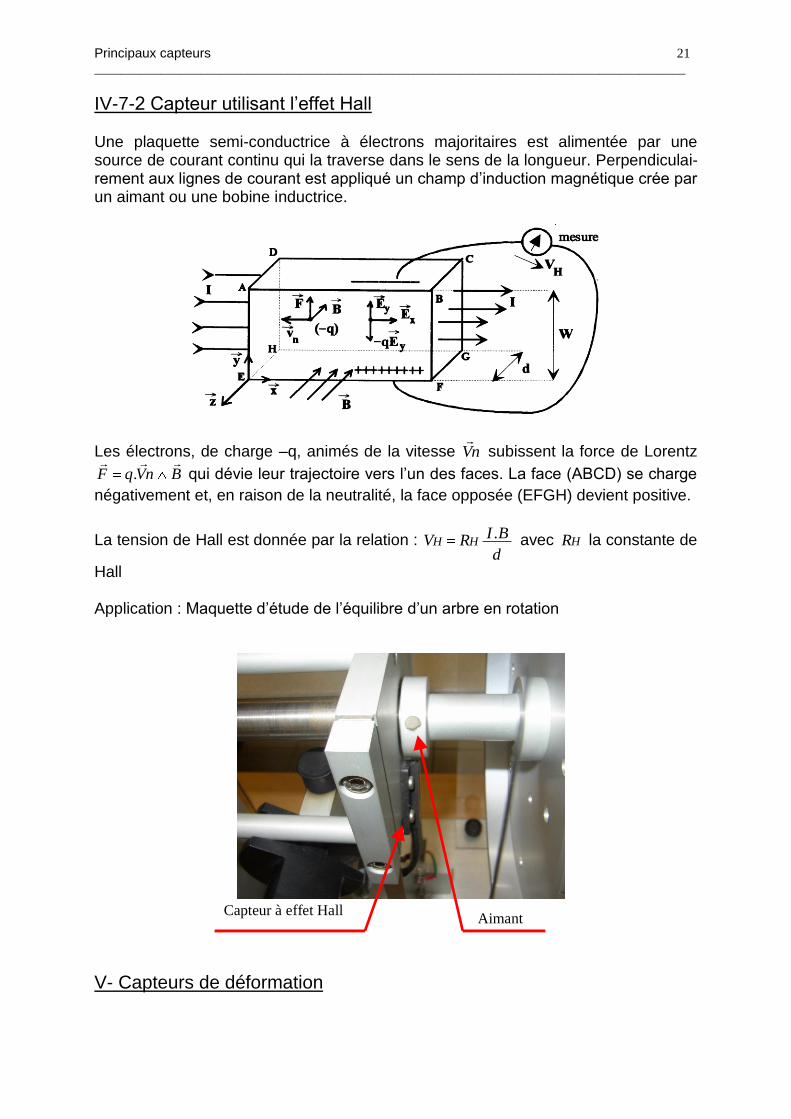
IV-7-2 Capteur utilisant l’effet Hall Une plaquette semi-conductrice à électrons majoritaires est alimentée par une source de courant continu qui la traverse dans le sens de la longueur. Perpendiculai-rement aux lignes de courant est appliqué un champ d’induction magnétique crée par un aimant ou une bobine inductrice.
Les électrons, de charge –q, animés de la vitesse nV
subissent la force de Lorentz
BnVqF
. qui dévie leur trajectoire vers l’un des faces. La face (ABCD) se charge
négativement et, en raison de la neutralité, la face opposée (EFGH) devient positive.
La tension de Hall est donnée par la relation : d
BIRV HH. avec HR la constante de
Hall Application : Maquette d’étude de l’équilibre d’un arbre en rotation
Capteur à effet HallAimant
V- Capteurs de déformation
Principaux capteurs 22
_________________________________________________________________________________________
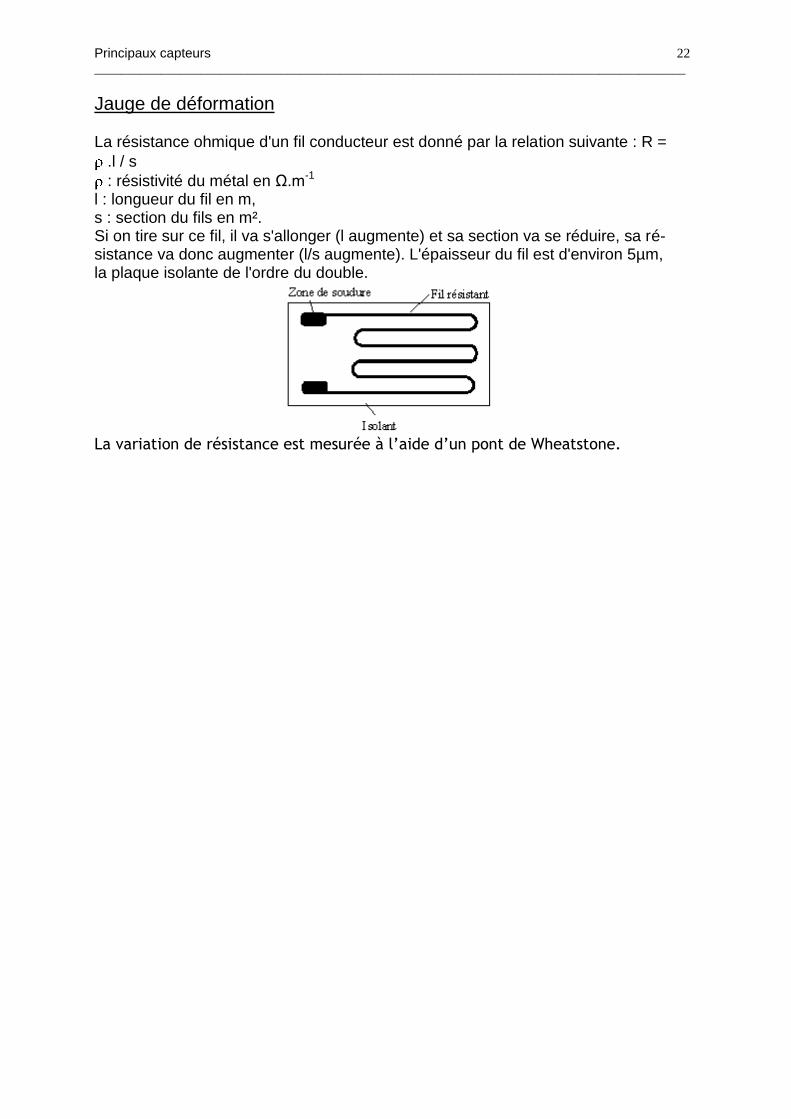
Jauge de déformation La résistance ohmique d'un fil conducteur est donné par la relation suivante : R =
.l / s
: résistivité du métal en Ω.m-1 l : longueur du fil en m, s : section du fils en m². Si on tire sur ce fil, il va s'allonger (l augmente) et sa section va se réduire, sa ré-sistance va donc augmenter (l/s augmente). L'épaisseur du fil est d'environ 5µm, la plaque isolante de l'ordre du double.
La variation de résistance est mesurée à l’aide d’un pont de Wheatstone.