bts industriels groupement a -...
TRANSCRIPT
MathématiquesBTS industriels
Groupement A

MathématiquesBTS industriels
Groupement A
Cours et exercices corrigés
Laurent LUBRANOProfesseur au lycée Duplessis-Mornay (Saumur)
Véronique CHEVRIERProfesseure au lycée Sadi Carnot (Saumur)
Stéphane LE MÉTEILProfesseur au lycée Robert Schuman (Havre)
Patrick LEMÉNICIERProfesseur au lycée Pierre-Gilles de Gennes
ENCPB-Paris

© Dunod, Paris, 2010
ISBN 978-2-10-054392-2
Couverture : Mateo
TABLE DES MATIÈRES
CHAPITRE 1 • FONCTIONS D’UNE VARIABLE RÉELLE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Se repérer avec la notion de fonction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Fonction en escalier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.3 Fonction affine par morceaux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.4 Fonction logarithme népérien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.5 Fonction exponentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.6 Fonction puissance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.7 Fonctions circulaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.8 Opérations algébriques et compositions sur les fonctions . . . . . . . . . . . . . . . . . . . . . . . . 38
1.9 Comparaison des fonctions exponentielle, puissance et logarithme au voisinage de+ ∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.10 Fonctions circulaires réciproques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
1.11 Fonction exponentielle d’un nombre complexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
CHAPITRE 2 • NOMBRES COMPLEXES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.1 C’est quoi un nombre complexe ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.2 À quoi cela sert-il ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.3 Forme algébrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.4 Module et argument d’un nombre complexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.5 Formule de Moivre – Formule d’Euler. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.6 Transformations élémentaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.7 Équations du second degré à coefficients réels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.8 Équations du second degré à coefficients complexes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
2.9 Études de transformation associée à z 7→ az + b . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
V
Table des matières
CHAPITRE 3 • SUITES NUMÉRIQUES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.1 C’est quoi une suite numérique ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.2 À quoi cela sert-il ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.3 Suites particulières . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.4 Variations d’une suite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.5 Majorations, minorations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.6 Comportement à l’infini . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
CHAPITRE 4 • CALCUL DIFFÉRENTIEL ET INTÉGRAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.1 C’est quoi une intégrale ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.2 À quoi cela sert-il ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.3 Propriétés de l’intégrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.4 Méthodes de calculs d’intégrales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
4.5 Quelques applications du calcul intégral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4.6 Développements limités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
CHAPITRE 5 • SÉRIES, SÉRIES DE FOURIER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.1 Préambule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.2 Séries numériques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5.3 Séries de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
CHAPITRE 6 • ÉQUATIONS DIFFÉRENTIELLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
6.1 C’est quoi une équation différentielle ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
6.2 À quoi cela sert-il ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
6.3 Équation différentielle du 1er ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
6.4 Équation différentielle linéaire du second ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
VI
Table des matières
CHAPITRE 7 • TRANSFORMATION DE LAPLACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
7.1 Préambule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
7.2 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
7.3 Transformées de fonctions usuelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
7.4 Propriétés de la transformée de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
7.5 Méthodes de calcul des transformées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
7.6 Transformation réciproque . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
7.7 Application à la résolution de problèmes différentiels . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
7.8 Compléments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
CHAPITRE 8 • TRANSFORMATION EN Z . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
8.1 Préambule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
8.2 Retour sur les séries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
8.3 Définitions préalables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
8.4 Transformation en z . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
8.5 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
8.6 Équations aux différences. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
CHAPITRE 9 • FONCTIONS DE DEUX OU TROIS VARIABLES RÉELLES . . . . . . . . . . . . . . . . . . . . . . . 197
9.1 Qu’est-ce qu’une fonction de deux variables ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
9.2 À quoi cela sert-il ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
9.3 Dérivées partielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 198
9.4 Fonctions de trois variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 201
9.5 Champ vectoriel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
9.6 Application aux calculs d’intégrales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
9.7 Calcul d’intégrales doubles et triples par changement de coordonnées . . . . . . . . . . . 209
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
CHAPITRE 10 •CALCUL VECTORIEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
10.1 Rappel sur les vecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217D
unod
–T
oute
repro
duct
ion
non
auto
risé
ees
tun
dél
it.
VII

Table des matières
10.2 Barycentre de deux points pondérés et plus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
10.3 Produit scalaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
10.4 Produit vectoriel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
10.5 Produit mixte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232
CHAPITRE 11 •MODÉLISATION GÉOMÉTRIQUE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
11.1 Qu’est-ce que la modélisation géométrique ?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
11.2 À quoi cela sert-il ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
11.3 Étude du modèle des courbes de Bézier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
11.4 Les courbes B-splines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
Travaux pratiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
CHAPITRE 12 •CALCUL MATRICIEL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
12.1 C’est quoi une matrice ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
12.2 À quoi cela sert-il ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 268
12.3 Addition de deux matrices de même dimension. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
12.4 Multiplication d’une matrice par un réel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
12.5 Multiplication de deux matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 270
12.6 Matrices carrées. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
12.7 Matrice unité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
12.8 Applications du calcul matriciel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
CHAPITRE 13 • STATISTIQUE DESCRIPTIVE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
13.1 Pourquoi faire des statistiques ?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
13.2 Les paramètres de position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
13.3 Les paramètres de dispersion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
13.4 Point moyen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
13.5 Covariance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
13.6 Ajustement affine par la méthode des moindres carrés . . . . . . . . . . . . . . . . . . . . . . . . . . 282
VIII
Table des matières
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285
CHAPITRE 14 • PROBABILITÉ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
14.1 Préambule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
14.2 Généralités sur les ensembles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
14.3 Axiome du calcul des probabilités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
14.4 Probabilités conditionnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
14.5 Variables aléatoires réelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295
14.6 Dénombrement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
14.7 Principales lois de probabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316
CHAPITRE 15 • STATISTIQUES INFÉRENTIELLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
15.1 Préambule . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
15.2 Lois limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
15.3 Estimation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323
15.4 Tests d’hypothèses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326
ANNEXE 1 • LOI DE POISSON . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367
ANNEXE 2 • LOI NORMALE CENTRÉE RÉDUITE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 369
IX

1FONCTIONSD’UNE VARIABLE RÉELLE
PR
ÉR
EQ
UIS • Notion d’ensemble de définition d’une fonction
• Variations et représentation graphique d’une fonction dans un repère du plan
• Dérivabilité d’une fonction
• Limites et intervalles
MO
TS C
LÉS
• Ensemble de définition
• Variations – Extremum
• Limite – Dérivée – Asymptote
• Parité – Périodicité
• Fonctions composées
• Fonction : en escalier, affines par morceaux, exponentielle, logarithme népérien,puissances, circulaires, circulaires réciproques
OBJE
CT
IFS
• Savoir traiter les situations pouvant être modélisées mathématiquement pardes fonctions à valeurs complexes ou réelles, représentant des « phénomènescontinus ».
1.1 SE REPÉRER AVEC LA NOTION DE FONCTION
1.1.1 Le modèle, l’exact et le vrai
L’étude des fonctions est soumise à de nombreux concepts qui, s’ils ne sont pas claire-
ment identifiés et utilisés, peuvent bloquer une étude pourtant facilement réalisable.
Les fonctions servent à modéliser des phénomènes continus. Pour cela il faut éta-
blir une relation entre une situation existante et un modèle mathématique capable de
l’approcher au mieux dans certaines conditions.
Exemple
La loi d’Ohm U = R×I présente la différence de potentiel U aux bornes d’un composantrésistif comme une fonction linéaire du courant I qui traverse ce composant. Ce modèle,n’est valable que dans certaines conditions liées entre autres à la température et à la
1
Chapitre 1 • Fonctions d’une variable réelle
technologie de fabrication du composant résistif. Ce modèle n’est pas universel ets’appliquera dans certaines conditions seulement.
En préalable à toute étude mettant en jeu des fonctions, il convient de ne pas se couper
du cadre réel de l’étude, et de bien positionner la validité du modèle. Il faut faire la
distinction entre ce qui sera « exact » comme le résultat d’un calcul utilisant le modèle,
et ce qui sera « vrai » c’est-à-dire le phénomène réel qui se produit.
Exercice d’application 1.1 Calculs avec un composant présentant une tolé-rance
Un générateur continu de U = 10 V et 5 A max est branché aux bornes d’unerésistance R en technologie couche carbone de valeur nominale 100 V et detolérance 10 %. Le calcul du courant débité I peut donc donner des résultats entredeux valeurs extrêmes que l’on demande de déterminer.
SOLUTION. Le modèle de calcul donnant le courant minimal est obtenu pour
R = 110 V et donc U = 110 × I donc I =
10
110A.
Le modèle de calcul donnant le courant maximal est obtenu pour R = 90 V et
donc U = 90 × I donc I =
10
90A.
1.1.2 L’ensemble de définition
Mathématiquement une fonction peut être définie sur R. Cependant les modèles utilisés
sont rarement valables pour une variable parcourant l’ensemble des nombres réels.
Définition 1.1
L’ensemble de définition d’une fonction f est l’ensemble des x tel que f (x) existe
(sauf limitation propre à la validité d’un modèle).
Exemple : Allongement d’un ressort
La longueur d’un ressort soumis à une force d’allongement est une fonction de k aveck la constante de raideur du ressort. En considérant la résistance mécanique maximalede l’alliage composant les spires du ressort, une trop forte tension entraînera unerupture, et le modèle y trouvera lui aussi ses limites. C’est donc seulement pour unecertaine plage de valeurs d’entrées de la force, que le modèle pourra être exploité. Iln’a pas de sens en dehors de ces valeurs de l’ensemble de définition.
Exercice d’application 1.2 Détermination d’un ensemble de définition.
Déterminer les ensembles de définition maximum des fonctions suivantes :
f : x 7→ 1
x + 4et g : x 7→
√x − 2
2
1.1. Se repérer avec la notion de fonction
SOLUTION. Pour f, il faut x + 4 6= 0 c’est-à-dire x 6= −4. Donc D f = R − {−4}.
Pour g, il faut x − 2 > 0 c’est-à-dire x > 2. Donc Dg = [2 ; + ∞[.
Point méthode
Trois cas peuvent se présenter :
L’expression au dénominateur ne peut pas être nulle.
L’expression sous un radical doit être positive ou nulle.
L’expression dont on calcule le logarithme népérien (ln) doit être > 0.
1.1.3 Les variations
a) Extremum d’une fonction sur un intervalle
Définition 1.2
Soit f une fonction définie sur un intervalle I, de courbe représentative C. Soit a un
réel de I.• Dire que f (a) est le maximum de f sur I signifie que pour tout réel x de I,f (x) < f (a).
• Dire que f (a) est le minimum de f sur I signifie que pour tout réel x de I,
f (x) > f (a).
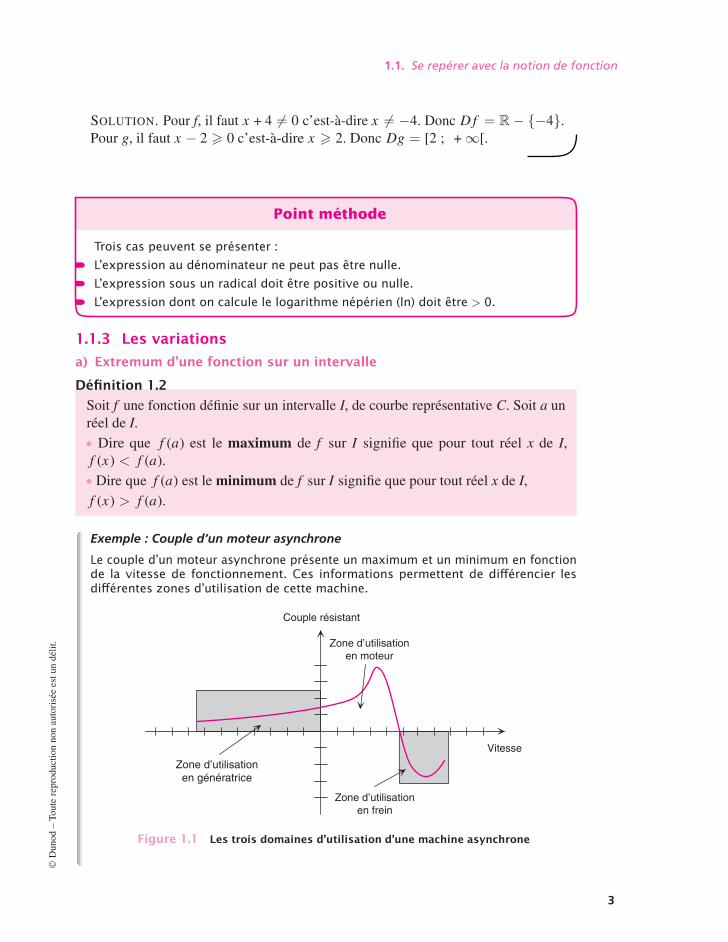
Exemple : Couple d’un moteur asynchrone
Le couple d’un moteur asynchrone présente un maximum et un minimum en fonctionde la vitesse de fonctionnement. Ces informations permettent de différencier lesdifférentes zones d’utilisation de cette machine.
Couple résistant
Vitesse
Zone d’utilisation
en frein
Zone d’utilisation
en génératrice
Zone d’utilisation
en moteur
Figure 1.1 Les trois domaines d’utilisation d’une machine asynchrone
D
unod
–T
oute
repro
duct
ion
non
auto
risé
ees
tun
dél
it.
3
Chapitre 1 • Fonctions d’une variable réelle
b) Sens de variation d’une fonction sur un intervalle
Des variations trop rapides peuvent empêcher un traitement en aval du phénomène.
De même des variations lentes permettent d’envisager un traitement éventuel moins
coûteux. Ici encore le signe de la dérivée de la fonction modèle va permettre rapidement
de repérer les variations sur les différents intervalles (voir § 1.1.5).
Définition 1.3
Soit f une fonction définie sur un intervalle I, de courbe représentative C. Soient aet b des réels.
• f est croissante sur I signifie que, si a < b alors f (a) < f (b).
• f est décroissante sur I signifie que, si a < b alors f (a) > f (b).
a b a b
f(a)f(a)
f(b)
f(b)
Figure 1.2 Croissance – Décroissance
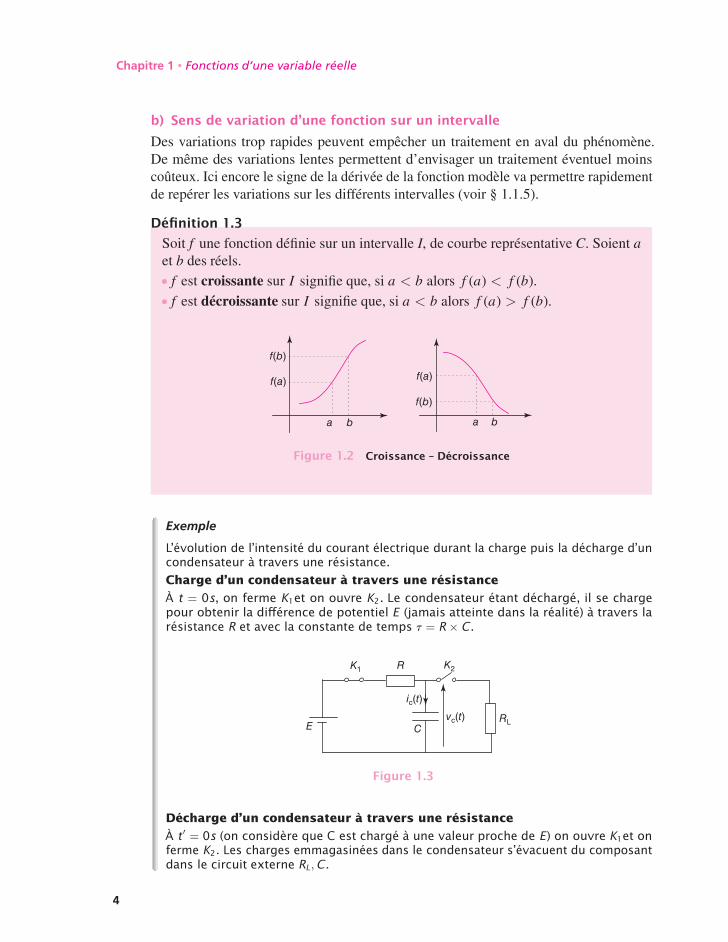
Exemple
L’évolution de l’intensité du courant électrique durant la charge puis la décharge d’uncondensateur à travers une résistance.
Charge d’un condensateur à travers une résistance
À t = 0s, on ferme K1et on ouvre K2. Le condensateur étant déchargé, il se chargepour obtenir la différence de potentiel E (jamais atteinte dans la réalité) à travers larésistance R et avec la constante de temps t = R × C .
E
R
CRL
K1
ic(t)
K2
vc(t)
Figure 1.3
Décharge d’un condensateur à travers une résistance
À t′ = 0s (on considère que C est chargé à une valeur proche de E) on ouvre K1et onferme K2. Les charges emmagasinées dans le condensateur s’évacuent du composantdans le circuit externe RL, C .
4
1.1. Se repérer avec la notion de fonction
s
E
R
CRL
K1
ic(t)
i(t) = – ic(t)K2
vc(t)
Figure 1.4
ic(t)
E
RL
E
R
t0
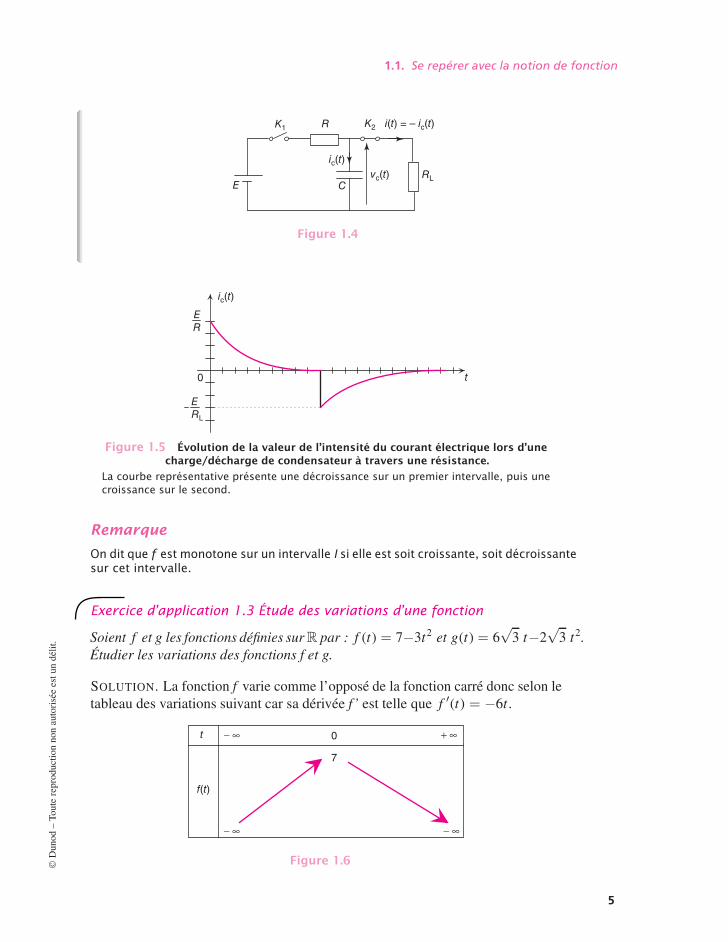
Figure 1.5 Évolution de la valeur de l’intensité du courant électrique lors d’unecharge/décharge de condensateur à travers une résistance.
La courbe représentative présente une décroissance sur un premier intervalle, puis unecroissance sur le second.
Remarque
On dit que f est monotone sur un intervalle I si elle est soit croissante, soit décroissantesur cet intervalle.
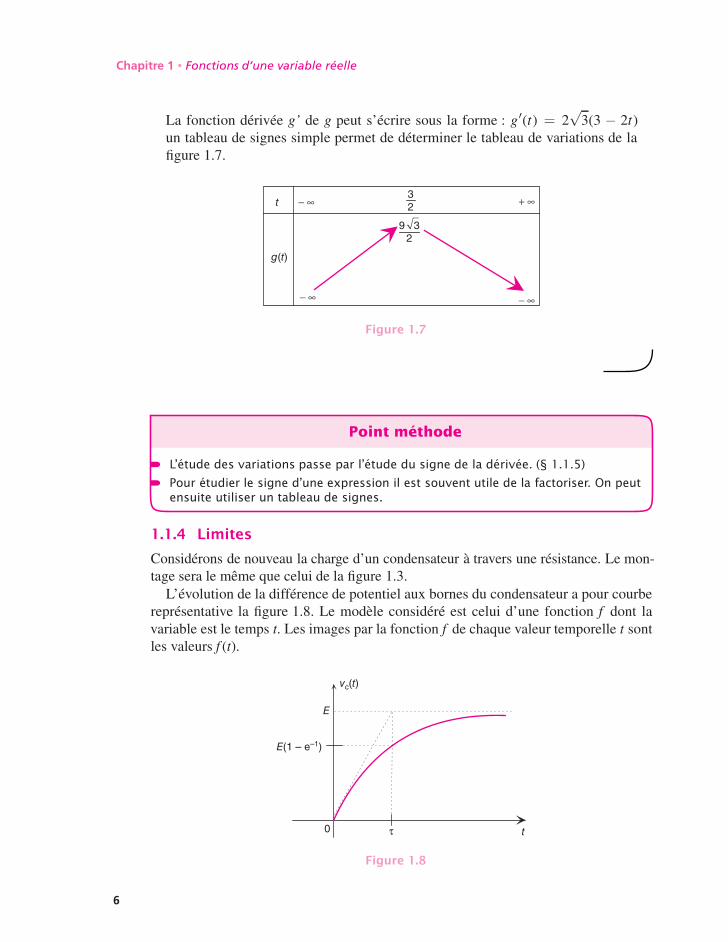
Exercice d’application 1.3 Étude des variations d’une fonction
Soient f et g les fonctions définies sur R par : f (t) = 7−3t2 et g(t) = 6√
3 t−2√
3 t2.Étudier les variations des fonctions f et g.
SOLUTION. La fonction f varie comme l’opposé de la fonction carré donc selon le
tableau des variations suivant car sa dérivée f’ est telle que f ′(t) = −6t .
t
f(t)
0
7
− ∞ + ∞
− ∞ − ∞
Figure 1.6
D
unod
–T
oute
repro
duct
ion
non
auto
risé
ees
tun
dél
it.
5
Chapitre 1 • Fonctions d’une variable réelle
La fonction dérivée g’ de g peut s’écrire sous la forme : g′(t) = 2√
3(3 − 2t)un tableau de signes simple permet de déterminer le tableau de variations de la
figure 1.7.
t
g(t)
3
2
9 3
2
− ∞ + ∞
− ∞− ∞
Figure 1.7
Point méthode
L’étude des variations passe par l’étude du signe de la dérivée. (§ 1.1.5)
Pour étudier le signe d’une expression il est souvent utile de la factoriser. On peutensuite utiliser un tableau de signes.
1.1.4 Limites
Considérons de nouveau la charge d’un condensateur à travers une résistance. Le mon-
tage sera le même que celui de la figure 1.3.
L’évolution de la différence de potentiel aux bornes du condensateur a pour courbe
représentative la figure 1.8. Le modèle considéré est celui d’une fonction f dont la
variable est le temps t. Les images par la fonction f de chaque valeur temporelle t sont
les valeurs f (t).
vc(t)
t0
E
E(1 – e–1)
τ
Figure 1.8
6
1.1. Se repérer avec la notion de fonction
Une valeur particulière de t est la valeur de la constante de temps t du circuit R-C à
laquelle la fonction f associe l’image f (t) = E(
1 − e−1)
.
Pour plus de facilité nous lui attribuerons la grandeur a = E(
1 − e−1)
.
• Si la question posée est : Quelle peut bien être la valeur vers laquelle se dirige la
courbe représentative de la fonction lorsque t = t, il est facile de répondre que
comme l’image de t existe par la fonction f et que le tracé est continu, alors la courbe
se dirige vers f (t) = a.
• Ce qui se traduira mathématiquement par : limt→t
f (t) = f (t) = a. Ceci indique
d’ailleurs que f est continue en t.
• Si la question posée est : Quelle peut bien être la valeur vers laquelle se dirige la
courbe représentative de la fonction lorsque t → +∞, il n’est pas facile de répondre.
En effet un condensateur réel ne peut jamais être chargé à son maximum car il y a des
pertes de charge permanentes à travers les résistances de métallisation des contacts
et dans l’air (Résistance non infinie de l’air). « L’image de l’infini par la fonction f »
n’est donc pas quelque chose d’existant pratiquement.
• La réponse à la question précédente est donc une extrapolation de notre courbe en
considérant un temps infini et en remarquant que de toute façon la différence de
potentiel de notre condensateur ne dépassera jamais la valeur maximale E.
• La courbe se dirige vers E. Ce qui se traduira mathématiquement par :
limt→+∞
f (t) = E .
Il convient donc de considérer lors de l’étude des limites d’une fonction, si cette
fonction est définie ou non au point d’étude considéré, et si cette recherche de limite
concerne un point ou l’infini.
Lorsqu’on connaît les limites des fonctions f et g, on peut en déduire les limites des
fonctions f + g ; f × g etf
g.
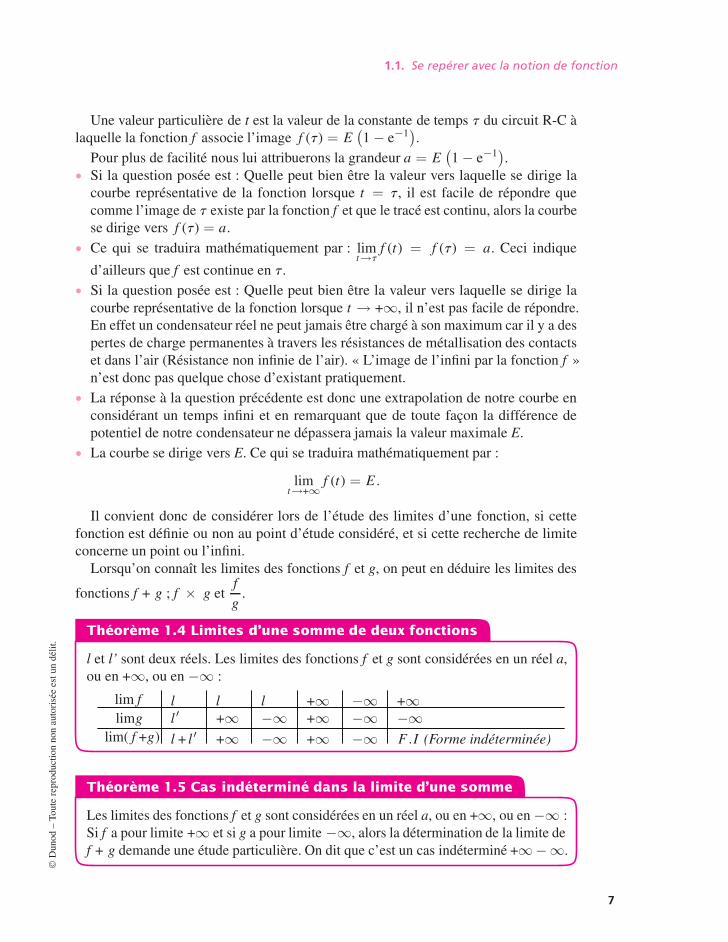
Théorème 1.4 Limites d’une somme de deux fonctions
l et l’ sont deux réels. Les limites des fonctions f et g sont considérées en un réel a,
ou en +∞, ou en −∞ :
lim f l l l +∞ −∞ +∞limg l ′ +∞ −∞ +∞ −∞ −∞
lim( f +g) l + l ′ +∞ −∞ +∞ −∞ F .I (Forme indéterminée)
Théorème 1.5 Cas indéterminé dans la limite d’une somme
Les limites des fonctions f et g sont considérées en un réel a, ou en +∞, ou en −∞ :
Si f a pour limite +∞ et si g a pour limite −∞, alors la détermination de la limite de
f + g demande une étude particulière. On dit que c’est un cas indéterminé +∞−∞.
D
unod
–T
oute
repro
duct
ion
non
auto
risé
ees
tun
dél
it.
7
Chapitre 1 • Fonctions d’une variable réelle
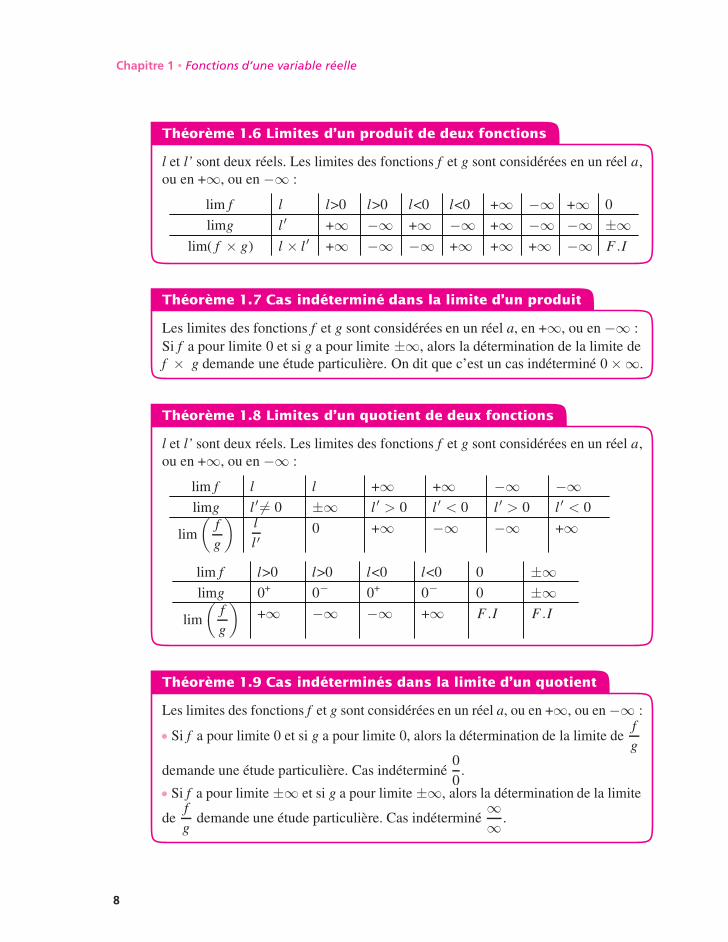
Théorème 1.6 Limites d’un produit de deux fonctions
l et l’ sont deux réels. Les limites des fonctions f et g sont considérées en un réel a,
ou en +∞, ou en −∞ :
lim f l l>0 l>0 l<0 l<0 +∞ −∞ +∞ 0
limg l ′ +∞ −∞ +∞ −∞ +∞ −∞ −∞ ±∞lim( f × g) l × l ′ +∞ −∞ −∞ +∞ +∞ +∞ −∞ F .I
Théorème 1.7 Cas indéterminé dans la limite d’un produit
Les limites des fonctions f et g sont considérées en un réel a, en +∞, ou en −∞ :
Si f a pour limite 0 et si g a pour limite ±∞, alors la détermination de la limite de
f × g demande une étude particulière. On dit que c’est un cas indéterminé 0 ×∞.
Théorème 1.8 Limites d’un quotient de deux fonctions
l et l’ sont deux réels. Les limites des fonctions f et g sont considérées en un réel a,
ou en +∞, ou en −∞ :
lim f l l +∞ +∞ −∞ −∞limg l ′ 6= 0 ±∞ l ′ > 0 l ′ < 0 l ′ > 0 l ′ < 0
lim
(
f
g
)
l
l ′0 +∞ −∞ −∞ +∞
lim f l>0 l>0 l<0 l<0 0 ±∞limg 0+ 0− 0+ 0− 0 ±∞
lim
(
f
g
)
+∞ −∞ −∞ +∞ F .I F .I
Théorème 1.9 Cas indéterminés dans la limite d’un quotient
Les limites des fonctions f et g sont considérées en un réel a, ou en +∞, ou en −∞ :
• Si f a pour limite 0 et si g a pour limite 0, alors la détermination de la limite def
g
demande une étude particulière. Cas indéterminé0
0.
• Si f a pour limite ±∞ et si g a pour limite ±∞, alors la détermination de la limite
def
gdemande une étude particulière. Cas indéterminé
∞∞ .
8

1.1. Se repérer avec la notion de fonction
Exercice d’application 1.4 Détermination d’une limite.
La fonction échelon unité U est définie par U(t) = 0 si t < 0 et U(t) = 1 si t > 0.La réponse y(t) d’un système soumis à un signal d’entrée x(t) est telle que Y(p)= H(p) · X(p), X et Y étant les transformées de Laplace respectives des fonctions xet y, et H la fonction de transfert du système.
Dans cet exercice, H (p) =
p + 1
p2 + p + 1, et le signal d’entrée est la fonction rampe
définie par x(t) = t · U(t). Calculer Y(p) et en déduire
y(
0+)
= limt → 0t > 0
y(t).
On pourra utiliser le théorème de la valeur initiale.
SOLUTION. H (p) =
p + 1
p2 + p + 1et X (p) =
1
p2car x(t) = t · U (t).
Y (p) = H (p) × X (p) =
p + 1
p2(
p2 + p + 1) donc
limp→+∞
pY (p) = limp→+∞
p + 1
p(
p2 + p + 1) = lim
p→+∞
p
p3= lim
p→+∞
1
p2= 0.
En utilisant le théorème de la valeur initiale, y(
0+)
= limt→0+
y(t) = 0.
Point méthode
Pour enlever certaines formes indéterminées lors de la détermination de limites,on peut soit :
Transformer l’expression algébrique en développant ou en factorisant.
Utiliser les théorèmes en respectant leurs domaines d’utilisation.
1.1.5 Dérivée
La notion de dérivée reste souvent mal exploitée car sa signification pratique, autre que
calculatoire, n’est pas mise en évidence.
Restons quelques instants « terre à terre » ou plutôt sur la neige. Dans une station de
ski la difficulté des pistes est indiquée par une couleur, présente sur les cartes et au bord
des pistes avec des piquets colorés. Cette même difficulté aurait pu être repérée zone par
zone par un nombre indiquant la pente de chaque segment de piste aussi petit soit-il. On
aurait donc pu, remplacer les piquets de couleur par des nombres successifs. Sur une
piste, les variations de terrain étant très importantes, il faudrait, en faisant une étude très
précise, marquer une très grande quantité de nombres différents.D
unod
–T
oute
repro
duct
ion
non
auto
risé
ees
tun
dél
it.
9
Chapitre 1 • Fonctions d’une variable réelle
En chaque endroit repéré, le nombre indiqué représente le « nombre dérivé », c’est-
à-dire « la pente » en cet endroit. Pour faire encore plus mathématique, ce nombre
représente le coefficient directeur de la tangente au relief (ramené bien sûr à un plan) au
point considéré. La suite de tous ces nombres dérivés peut être en première approche
considérée comme issue d’un calcul utilisant l’expression algébrique de la fonction
dérivée d’une fonction décrivant une coupe du relief.
La dérivée d’une fonction sur un intervalle n’est rien d’autre qu’une autre fonction
décrivant en continu les variations (les pentes, exprimées par les nombres dérivés) d’un
phénomène réel.
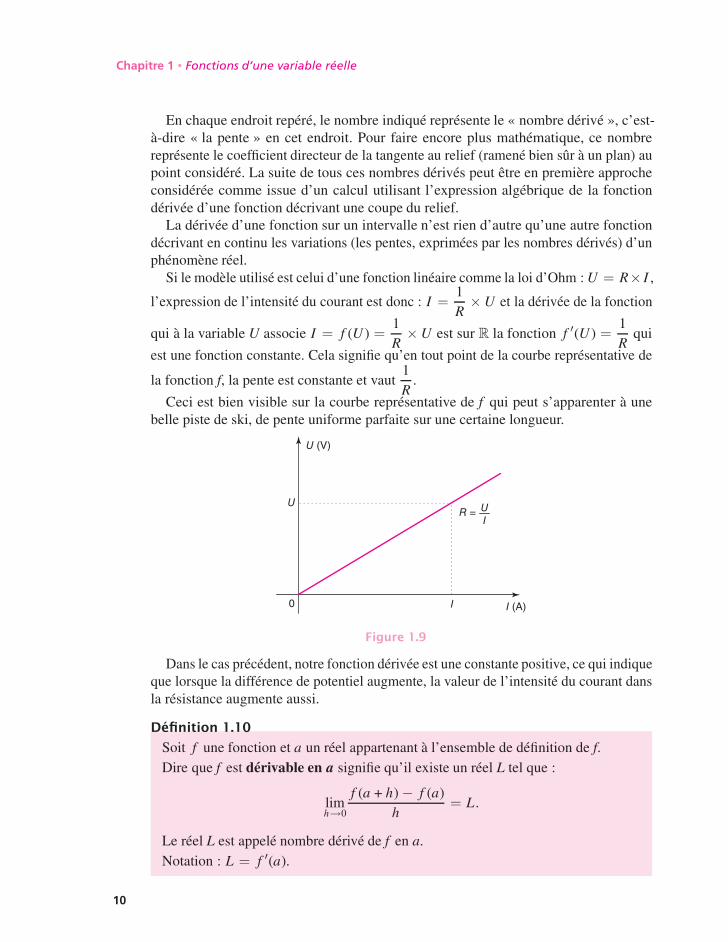
Si le modèle utilisé est celui d’une fonction linéaire comme la loi d’Ohm : U = R× I ,
l’expression de l’intensité du courant est donc : I =
1
R× U et la dérivée de la fonction
qui à la variable U associe I = f (U ) =
1
R× U est sur R la fonction f ′(U ) =
1
Rqui
est une fonction constante. Cela signifie qu’en tout point de la courbe représentative de
la fonction f, la pente est constante et vaut1
R.
Ceci est bien visible sur la courbe représentative de f qui peut s’apparenter à une
belle piste de ski, de pente uniforme parfaite sur une certaine longueur.
R = U
I
U
I0 I (A)
U (V)
Figure 1.9
Dans le cas précédent, notre fonction dérivée est une constante positive, ce qui indique
que lorsque la différence de potentiel augmente, la valeur de l’intensité du courant dans
la résistance augmente aussi.
Définition 1.10
Soit f une fonction et a un réel appartenant à l’ensemble de définition de f.
Dire que f est dérivable en a signifie qu’il existe un réel L tel que :
limh→0
f (a + h) − f (a)
h= L .
Le réel L est appelé nombre dérivé de f en a.
Notation : L = f ′(a).
10
1.1. Se repérer avec la notion de fonction
Définition 1.11
Soit f une fonction. S’il existe un ensemble non vide de réels x tel que f soit dérivable
en x, alors la fonction dérivée de f est la fonction f’ qui à tout réel x de cet ensemble
associe le nombre dérivé de f en x, x 7→ f ′(x).
Définition 1.12
Soit f une fonction et Cf la courbe représentative de cette fonction dans un plan
muni d’un repère orthonormé. a est un réel appartenant à l’ensemble de définition
de f.
Si la fonction f est dérivable en a, alors la droite qui passe par le pointM (a ; f (a))
et a pour coefficient directeur f’(a) représente la tangente à la courbe représentative
au point M.
Théorème 1.13
Si f et g sont des fonctions dérivables sur un intervalle I, et que leurs dérivées
respectives sur I sont f’ et g’ alors on peut déterminer sur I les fonctions dérivées
suivantes :
• dérivée d’une somme ( f + g)′ = f ′ + g′
• dérivée d’un produit ( f × g)′ = f ′ × g + f × g′
• dérivée d’un quotient
(
f
g
)′
=
g × f ′ − g′ × f
g2avec g(x) 6= 0 sur I.
La dérivée représentant intuitivement la pente à la courbe représentative d’une fonc-
tion, il est aisé de retenir les théorèmes suivants :
Théorème 1.14
Si f est une fonction monotone et dérivable sur un intervalle I, alors :
• si f est croissante sur I, alors f ′(x) > 0 pour x ∈ I .
• si f est décroissante sur I, alors f ′(x) < 0 pour x ∈ I .
• si f est constante sur I, alors f ′(x) = 0 pour x ∈ I .
Exercice d’application 1.5 Calcul de la dérivée et de l’équation d’une tan-gente
On considère la fonction f définie sur I =] − 1 ; + 1] par f (x) =
ex
√x + 1
.
Déterminer l’expression algébrique de la fonction f’ dérivée de la fonction f sui-vante sur l’intervalle I. Déterminer une équation de la tangente (T) à (C) au pointd’abscisse 0.
Dunod
–T
oute
repro
duct
ion
non
auto
risé
ees
tun
dél
it.
11
Chapitre 1 • Fonctions d’une variable réelle
SOLUTION. La dérivée de la fonction est, selon les règles de la dérivée d’un
quotient :
f ′(x) =
√x + 1 × ex − ex × 1
2√
x + 1(√
x + 1)2
= ex
(
2x + 1
(x + 1) × 2√
x + 1
)
donc L’équation de (T) est : y = f ′(0)(x − 0) + f (0) donc y =
1
2x + 1.
Point méthode
Il est indispensable de connaître les dérivées des fonctions de base et les théorèmesde dérivation pour pouvoir étudier une fonction.
1.1.6 Droites asymptotes à la courbe représentative
Il est souvent demandé dans un exercice de déterminer l’expression algébrique d’une
droite asymptote ou de prouver qu’une droite est asymptote à la courbe représentative
d’une fonction. Quelle utilité réelle modélise-t-on avec cette notion ?
Lorsqu’un phénomène réel a pour variable le temps, il est souvent utile de connaître
l’état vers lequel se dirige le phénomène (état stable) à la fin d’une période transitoire.
C’est le premier cas de droite asymptote qui peut par exemple exister dans la courbe de
charge d’un condensateur à travers une résistance.
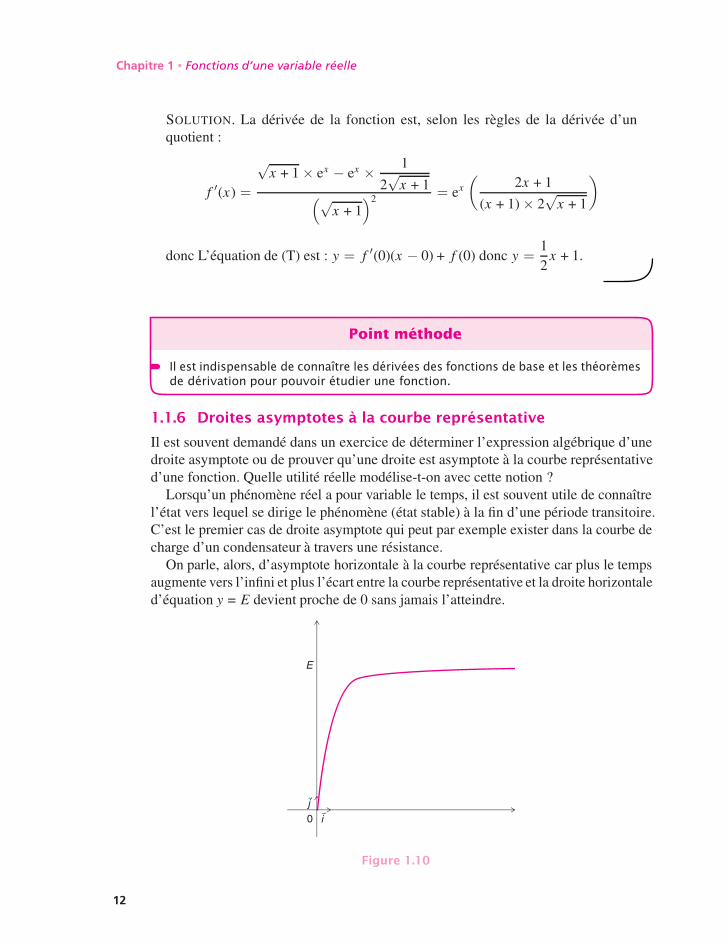
On parle, alors, d’asymptote horizontale à la courbe représentative car plus le temps
augmente vers l’infini et plus l’écart entre la courbe représentative et la droite horizontale
d’équation y = E devient proche de 0 sans jamais l’atteindre.
E
0 i
j
Figure 1.10
12
1.1. Se repérer avec la notion de fonction
Théorème 1.15
Soit f une fonction, C sa courbe représentative dans un repère orthonormé du plan
et a un réel.
Si limx→+∞
f (x) = a, alors la droite d’équation y = a est asymptote horizontale à C en
+∞.
Si limx→−∞
f (x) = a, alors la droite d’équation y = a est asymptote horizontale à C
en −∞.
Un autre cas peut se produire, lorsque par exemple une machine à courant continu
s’emballe à cause de la perte de son flux inducteur. Dans ce cas la courbe représentative
de la vitesse en fonction du flux inducteur (ce qui n’est pas bien sûr la meilleure
commande de ce type de machines) va évoluer vers l’infini lorsque le flux tend vers 0.
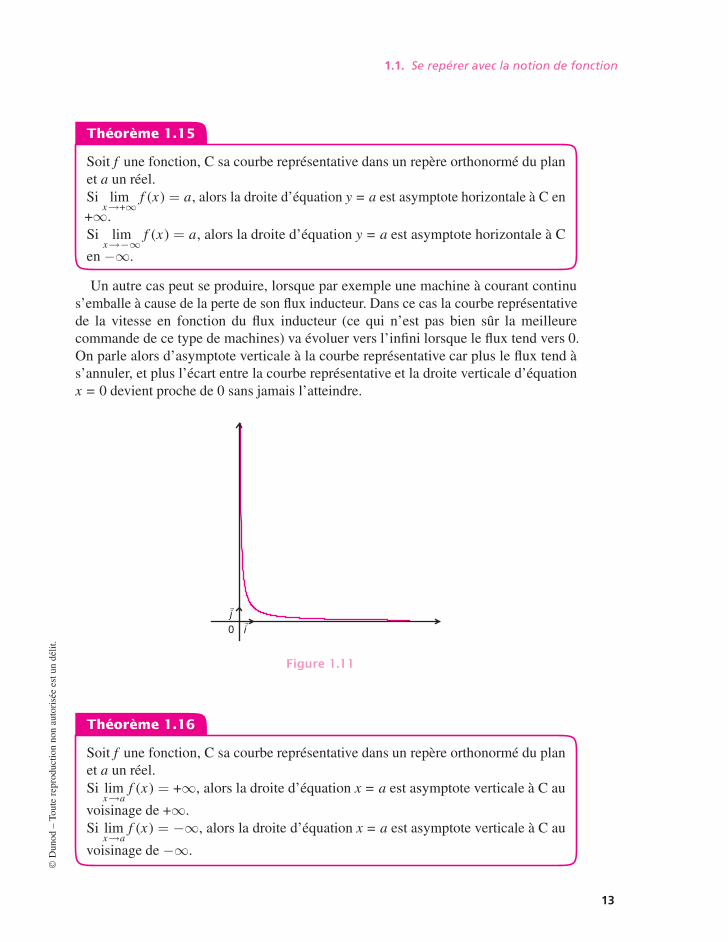
On parle alors d’asymptote verticale à la courbe représentative car plus le flux tend à
s’annuler, et plus l’écart entre la courbe représentative et la droite verticale d’équation
x = 0 devient proche de 0 sans jamais l’atteindre.
0 i
j
Figure 1.11
Théorème 1.16
Soit f une fonction, C sa courbe représentative dans un repère orthonormé du plan
et a un réel.
Si limx→a
f (x) = +∞, alors la droite d’équation x = a est asymptote verticale à C au
voisinage de +∞.
Si limx→a
f (x) = −∞, alors la droite d’équation x = a est asymptote verticale à C au
voisinage de −∞.
D
unod
–T
oute
repro
duct
ion
non
auto
risé
ees
tun
dél
it.
13

Chapitre 1 • Fonctions d’une variable réelle
Le dernier cas pouvant se produire est celui des droites asymptotes obliques à une
courbe. La commande en vitesse d’un automatisme peut présenter ce type d’asymptote.
C’est-à-dire qu’une consigne de vitesse est donnée pour un certain déplacement et que
le système tente de se rapprocher de cette consigne au maximum, mais sans jamais
l’atteindre.
Théorème 1.17
Soit f une fonction, C sa courbe représentative dans un repère orthonormé du plan
et D la droite d’équation y = ax + b avec a un réel non nul et b un réel.
Si limx→+∞
[ f (x) − (ax + b)] = 0, alors la droite D d’équation y = ax + b est asymp-
tote oblique à C au voisinage de +∞.
Si limx→−∞
[ f (x) − (ax + b)] = 0, alors la droite D d’équation y = ax + b est asymp-
tote oblique à C au voisinage de −∞.
Exercice d’application 1.6 Étude des variations et des asymptotes d’unefonction.
Soit la fonction numérique f définie par :
f (t) = t − 2 + 2e−t2
a) Étudier les variations de f sur [0 ; + ∞[.b) Déterminer la limite de f (t) − (t − 2) lorsque t tend vers +∞.c) On justifiera que la courbe représentative de f présente une asymptote que l’onprécisera.
SOLUTION. La dérivée de la fonction f est définie par :
f ′(t) = 1 − e−t2 .
Sur l’intervalle [0 ; + ∞[ la dérivée est positive donc la fonction est croissante.
f (t) − (t − 2) = 2e−t2 donc lim
t→+∞( f (t) − (t − 2)) = lim
t→+∞
(
2e−t2
)
= 0.
La droite d’équation y = t − 2 est donc asymptote oblique à la courbe représenta-
tive de la fonction f au voisinage de +∞.
Point méthode
Pour identifier la présence éventuelle d’asymptotes, on repère la présence d’unelimite réelle en ±∞ ou d’une limite infinie en une valeur réelle.
14
1.1. Se repérer avec la notion de fonction
1.1.7 Parité d’une fonction
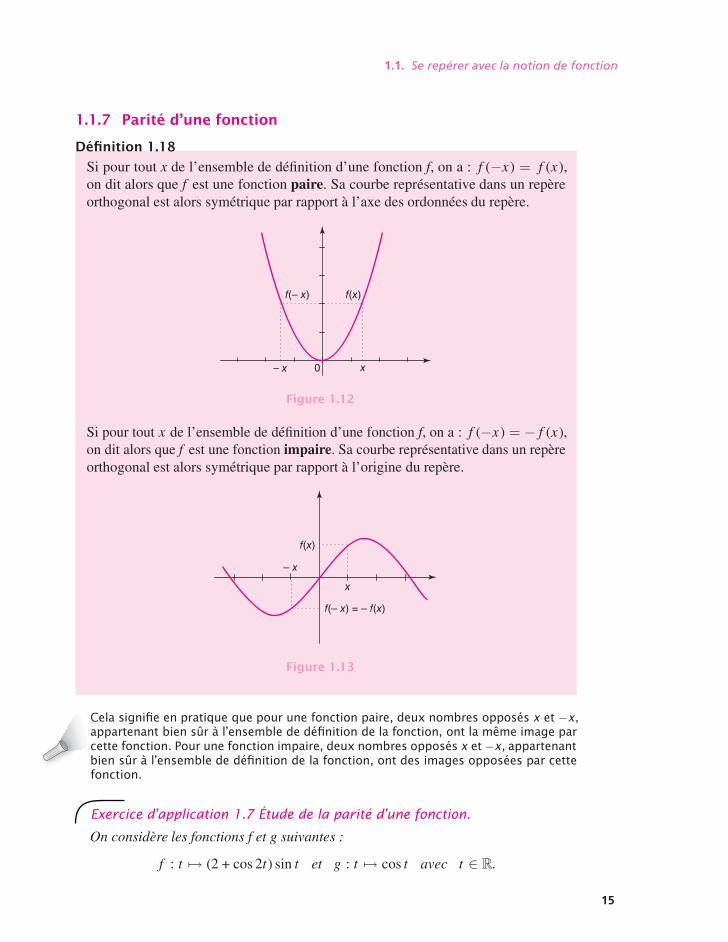
Définition 1.18
Si pour tout x de l’ensemble de définition d’une fonction f, on a : f (−x) = f (x),
on dit alors que f est une fonction paire. Sa courbe représentative dans un repère
orthogonal est alors symétrique par rapport à l’axe des ordonnées du repère.
f(x)f(– x)
– x x0
Figure 1.12
Si pour tout x de l’ensemble de définition d’une fonction f, on a : f (−x) = − f (x),
on dit alors que f est une fonction impaire. Sa courbe représentative dans un repère
orthogonal est alors symétrique par rapport à l’origine du repère.
f(x)
f(– x) = – f(x)
– x
x
Figure 1.13
Cela signifie en pratique que pour une fonction paire, deux nombres opposés x et −x,appartenant bien sûr à l’ensemble de définition de la fonction, ont la même image parcette fonction. Pour une fonction impaire, deux nombres opposés x et −x, appartenantbien sûr à l’ensemble de définition de la fonction, ont des images opposées par cettefonction.
Exercice d’application 1.7 Étude de la parité d’une fonction.
On considère les fonctions f et g suivantes :
f : t 7→ (2 + cos 2t) sin t et g : t 7→ cos t avec t ∈ R.
15
Chapitre 1 • Fonctions d’une variable réelle
Étudier la parité de chacune des fonctions f et g.
SOLUTION. On calcule f (−t) et g(−t).
f (−t) = (2 + cos(−2t)) sin(−t) = (2 + cos 2t) × (− sin t)
= −(2 + cos 2t) × sin t = − f (t)
La fonction f est donc impaire.
g(−t) = cos(−t) = cos t = g(t) La fonction g est donc paire.
Point méthode
Pour montrer qu’une fonction est paire, on doit calculer l’expression algébrique def(−x) et vérifier qu’elle est identique à celle de f(x).
Un seul contre exemple suffit à montrer que la fonction n’est pas paire.
Il est bien sûr possible d’utiliser une méthode identique avec la définition desfonctions impaires.
1.1.8 Périodicité d’une fonction
De nombreux phénomènes se reproduisent de façon régulière dans le temps. C’est le cas
par exemple du transport de l’électricité jusqu’à votre domicile. Le réseau de transport et
distribution, achemine l’électricité sous forme d’une différence de potentiel sinusoïdale
de valeur efficace 230 V et de fréquence 50 Hz. Donc avec une période de 20 ms.
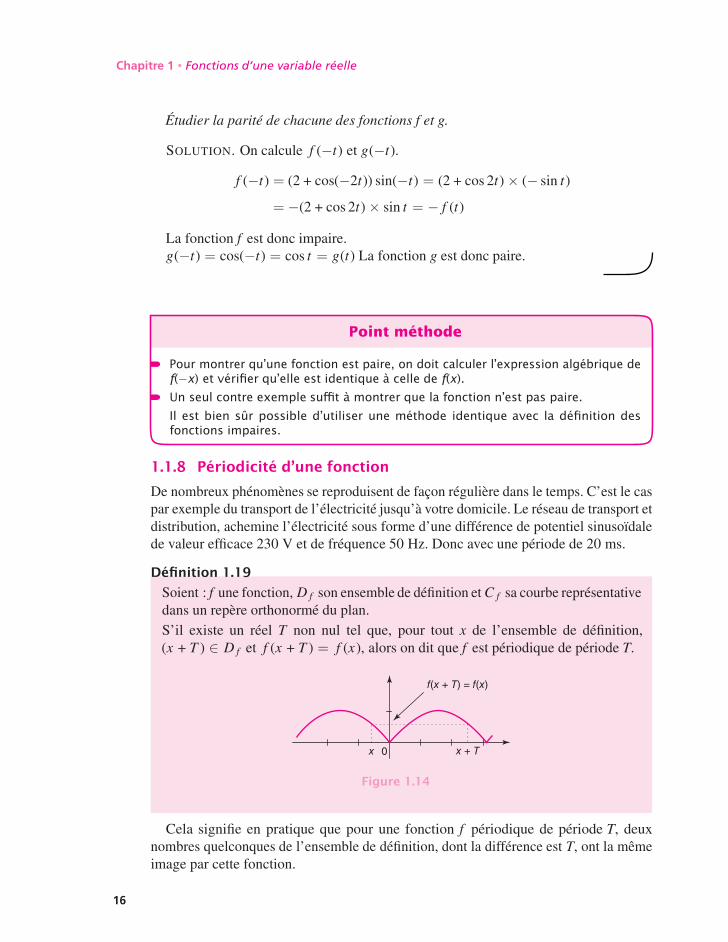
Définition 1.19
Soient : f une fonction, D f son ensemble de définition et C f sa courbe représentative
dans un repère orthonormé du plan.
S’il existe un réel T non nul tel que, pour tout x de l’ensemble de définition,
(x + T ) ∈ D f et f (x + T ) = f (x), alors on dit que f est périodique de période T.
f(x + T) = f(x)
x + Tx 0
Figure 1.14
Cela signifie en pratique que pour une fonction f périodique de période T, deux
nombres quelconques de l’ensemble de définition, dont la différence est T, ont la même
image par cette fonction.
16

1.2. Fonction en escalier
Exercice d’application 1.8 Étude de la périodicité d’une fonction.
On considère les fonctions f et g suivantes :
f : t 7→ (2 + cos 2t) sin t et g : t 7→ cos t avec t ∈ R.
Montrer que f et g sont périodiques de période 2p.
SOLUTION. On calcule f (t + 2p) et g(t + 2p).
f (t + 2p) = (2 + cos 2(t + 2p)) sin(t + 2p)
= (2 + cos(2t + 4p)) sin(t + 2p)
donc
f (t + 2p) = (2 + cos 2t) sin t = f (t).
La fonction f est donc 2p périodique. Et
g(t + 2p) = cos(t + 2p) = cos t = g(t).
La fonction g est donc 2p périodique.
1.2 FONCTION EN ESCALIER
1.2.1 Les fondamentaux de la fonction en escalier
Définition 1.20
Considérons une suite finie et croissante de n éléments xn d’un intervalle [a ; b] tels
que : x1 = a, x2, x3, ..., xn = b. Si une telle suite existe, la fonction en escalier fest une fonction telle que sur chaque intervalle
]
xi−1 ; xi
[
f soit constante et égale
à ki .
0a b x
y
x1 x2 x3 x4
k1
k3
k4
k5
k2
Figure 1.15
D
unod
–T
oute
repro
duct
ion
non
auto
risé
ees
tun
dél
it.
17
Chapitre 1 • Fonctions d’une variable réelle
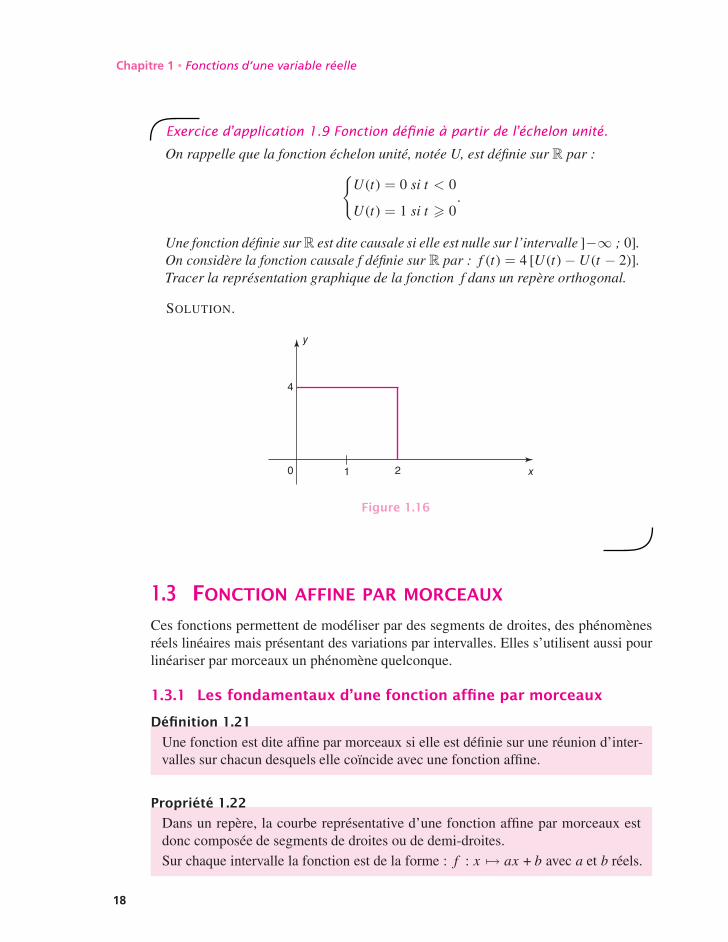
Exercice d’application 1.9 Fonction définie à partir de l’échelon unité.
On rappelle que la fonction échelon unité, notée U, est définie sur R par :{
U (t) = 0 si t < 0
U (t) = 1 si t > 0.
Une fonction définie sur R est dite causale si elle est nulle sur l’intervalle ]−∞ ; 0].On considère la fonction causale f définie sur R par : f (t) = 4 [U (t) − U (t − 2)].Tracer la représentation graphique de la fonction f dans un repère orthogonal.
SOLUTION.
x
y
4
0 21
Figure 1.16
1.3 FONCTION AFFINE PAR MORCEAUX
Ces fonctions permettent de modéliser par des segments de droites, des phénomènes
réels linéaires mais présentant des variations par intervalles. Elles s’utilisent aussi pour
linéariser par morceaux un phénomène quelconque.
1.3.1 Les fondamentaux d’une fonction affine par morceaux
Définition 1.21
Une fonction est dite affine par morceaux si elle est définie sur une réunion d’inter-
valles sur chacun desquels elle coïncide avec une fonction affine.
Propriété 1.22
Dans un repère, la courbe représentative d’une fonction affine par morceaux est
donc composée de segments de droites ou de demi-droites.
Sur chaque intervalle la fonction est de la forme : f : x 7→ ax + b avec a et b réels.
18
1.3. Fonction affine par morceaux
Point méthode
La représentation graphique d’une fonction affine est une droite. La représentationgraphique d’une fonction affine par morceaux est donc composée de segments dedroites.
Dans l’expression y = ax + b, a est le coefficient directeur, c’est-à-dire la pentedu segment de droite. Il est possible de calculer a en considérant deux points du
segment considéré A (xA ; yA) et B (xB ; yB) et en calculant : a =
yB − yA
xB − xA.
Le point A (xA ; yA) appartenant à la droite (AB), ses coordonnées vérifient l’égalitéyA = axA + b. Il est donc facile de calculer l’ordonnée à l’origine b en connaissant aau préalable. b = yA − axA.
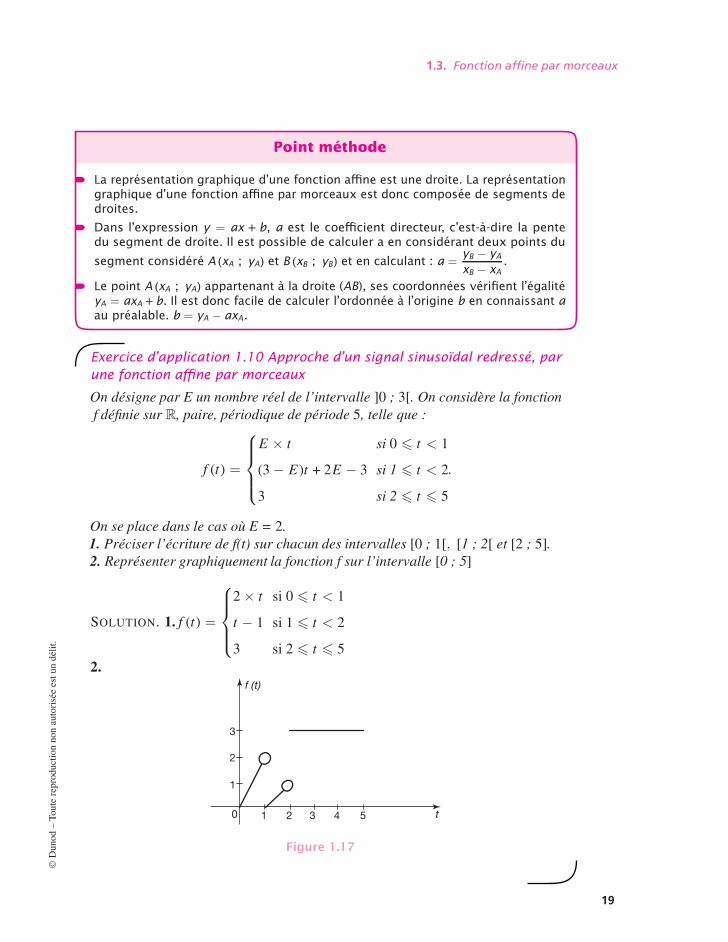
Exercice d’application 1.10 Approche d’un signal sinusoïdal redressé, parune fonction affine par morceaux
On désigne par E un nombre réel de l’intervalle ]0 ; 3[. On considère la fonctionf définie sur R, paire, périodique de période 5, telle que :
f (t) =
E × t
(3 − E )t + 2E − 3
3
si 0 6 t < 1
si 1 6 t < 2
si 2 6 t 6 5
.
On se place dans le cas où E = 2.1. Préciser l’écriture de f(t) sur chacun des intervalles [0 ; 1[, [1 ; 2[ et [2 ; 5].2. Représenter graphiquement la fonction f sur l’intervalle [0 ; 5]
SOLUTION. 1. f (t) =
2 × t
t − 1
3
si 0 6 t < 1
si 1 6 t < 2
si 2 6 t 6 5
2.
0 1
1
2
3
f (t)
2 3 4 5 t
Figure 1.17
D
unod
–T
oute
repro
duct
ion
non
auto
risé
ees
tun
dél
it.
19
Chapitre 1 • Fonctions d’une variable réelle
Point méthode
Un coefficient directeur de fonction affine positif indique une pente positive.
Un coefficient directeur de fonction affine négatif indique une pente négative.
La fonction affine par morceaux peut être définie sur une réunion d’intervalles noncontinue. De plus certains intervalles peuvent présenter des extrémités exclues.
1.4 FONCTION LOGARITHME NÉPÉRIEN
La fonction x 7→ 1
xest définie et continue sur ] −∞ ; 0[ et sur ]0 ; + ∞[, elle admet
donc des primitives sur chacun de ces intervalles.
1.4.1 Les fondamentaux de la fonction f : x 7→ ln (x)
Définition 1.23
La fonction logarithme népérien, notée ln, est la primitive définie sur ]0 ; +∞[ qui
s’annule en 1, de la fonction x 7→ 1
x.
Propriétés 1.24
• ln(1) = 0
• ln(x) > 0 si x > 1 et ln(x) < 0 si x ∈]0; 1[
Théorèmes 1.25
• Soient a et b deux réels strictement positifs alors ln(a × b) = ln(a) + ln(b)
• Soit b un réel strictement positif alors ln
(
1
b
)
= − ln(b)
• Soient a, b deux réels strictement positifs alors ln(a
b
)
= ln(a) − ln(b)
• Soient a un réel strictement positif et n un entier relatif alors ln(an) = n × ln(a)
• Soit a un réel strictement positif alors ln(√
a)
=
1
2× ln(a)
Propriétés 1.26
La fonction ln est strictement croissante sur R+∗
f est continue et strictement croissante sur ]0 ; +∞[, d’après le théorème des valeurs
intermédiaires, il existe un unique réel e tel que ln(e) = 1.
On a e ≈ 2,71828182845904523536028747
20