automates cellulaires : des dynamiques aux calculs, … · automates cellulaires : des dynamiques...
TRANSCRIPT
Automates cellulaires :des dynamiques aux calculs,
un aller-retourSIESTE — ENS Lyon
Guillaume Theyssier
LAMA (CNRS, Université de Savoie)
30 octobre 2007
Introduction
comprend-on un système lorsque l’on connaît sa loid’évolution ?peut-on prédire un système lorsque l’on connaît sa loid’évolution ?
Systèmes complexesloi d’évolution simple(généralement) de nombreuses entités en interaction localecomportement global ?
Un exemple : les automates cellulaires
Introduction
comprend-on un système lorsque l’on connaît sa loid’évolution ?peut-on prédire un système lorsque l’on connaît sa loid’évolution ?
Systèmes complexesloi d’évolution simple(généralement) de nombreuses entités en interaction localecomportement global ?
Un exemple : les automates cellulaires
Introduction
comprend-on un système lorsque l’on connaît sa loid’évolution ?peut-on prédire un système lorsque l’on connaît sa loid’évolution ?
Systèmes complexesloi d’évolution simple(généralement) de nombreuses entités en interaction localecomportement global ?
Un exemple : les automates cellulaires
Contenu de cet exposé
Présentation du modèle
systèmes dynamiques / modèle de calcul
Imprévisibilités
chaos déterministe / incalculabilité
Classifications
Automates cellulairesDéfinition
I Objet syntaxiqueun alphabet Aun réseau régulier de cellules (généralement Zd )un voisinage V = v1, . . . , vn (partie finie de Zd )une fonction locale f : An → A (où n = |V |)
I Objet étudiéespace des configuration : AZd
fonction globale F : AZd → AZddéfinie par :
F (x)z = f(xz+v1 , . . . , xz+vn
)
Automates cellulairesDéfinition
I Objet syntaxiqueun alphabet Aun réseau régulier de cellules (généralement Zd )un voisinage V = v1, . . . , vn (partie finie de Zd )une fonction locale f : An → A (où n = |V |)
I Objet étudiéespace des configuration : AZd
fonction globale F : AZd → AZddéfinie par :
F (x)z = f(xz+v1 , . . . , xz+vn
)
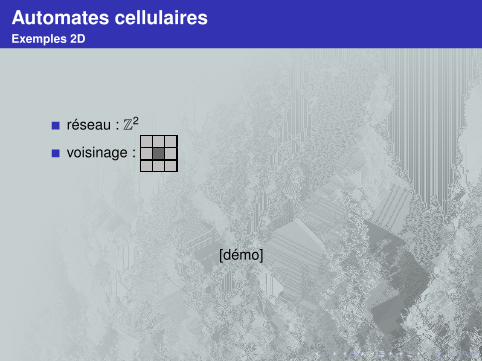
Automates cellulairesExemples 2D
réseau : Z2
voisinage :
[démo]
Automates cellulairesExemples 2D
réseau : Z2
voisinage :
[démo]
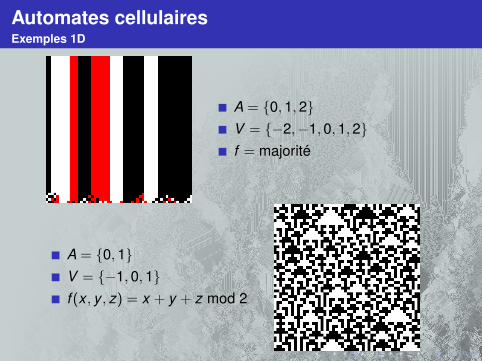
Automates cellulairesExemples 1D
A = 0, 1, 2V = −2,−1, 0, 1, 2f = majorité
A = 0, 1V = −1, 0, 1f (x , y , z) = x + y + z mod 2

Automates cellulairesSystèmes dynamiques
I Topologie sur AZd
topologie produit de la topologie discrète
métrisable par δ(x , y) = 2−min‖z‖∞:xz 6=yz
0
x
y
δ(x , y) = 1/8
(AZd
, δ)
est compact
Automates cellulairesSystèmes dynamiques
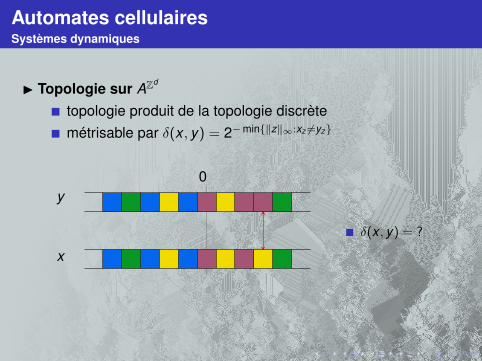
I Topologie sur AZd
topologie produit de la topologie discrètemétrisable par δ(x , y) = 2−min‖z‖∞:xz 6=yz
0
x
y
δ(x , y) = ?
(AZd
, δ)
est compact
Automates cellulairesSystèmes dynamiques
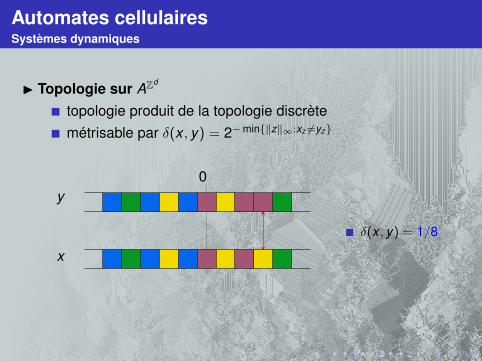
I Topologie sur AZd
topologie produit de la topologie discrètemétrisable par δ(x , y) = 2−min‖z‖∞:xz 6=yz
0
x
y
δ(x , y) = 1/8
(AZd
, δ)
est compact
Automates cellulairesSystèmes dynamiques
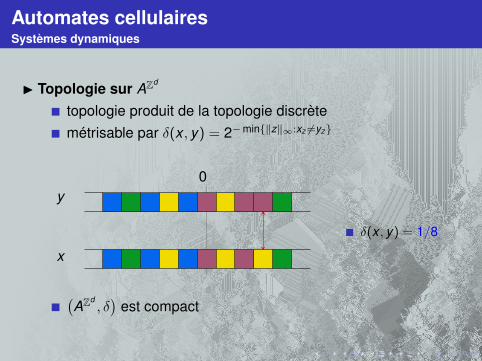
I Topologie sur AZd
topologie produit de la topologie discrètemétrisable par δ(x , y) = 2−min‖z‖∞:xz 6=yz
0
x
y
δ(x , y) = 1/8
(AZd
, δ)
est compact
Automates cellulairesSystèmes dynamiques
Théorème (Curtis-Lyndon-Hedlund)F est la fonction globale d’un AC si et seulement si F estcontinue et commute avec les décalages.
décalages : translation des états sur le réseauformellement : les fonctions σz avec
(σz(x)
)z′ = xz+z′
I Vision topologiqueconfigurations ↔ points d’un espace compactautomates cellulaires ↔ fonctions continues
Automates cellulairesSystèmes dynamiques
Théorème (Curtis-Lyndon-Hedlund)F est la fonction globale d’un AC si et seulement si F estcontinue et commute avec les décalages.
décalages : translation des états sur le réseauformellement : les fonctions σz avec
(σz(x)
)z′ = xz+z′
I Vision topologiqueconfigurations ↔ points d’un espace compactautomates cellulaires ↔ fonctions continues
Automates cellulairesSystèmes dynamiques
I application du point de vue topologique
soit F la fonction globale d’un ACsupposons F bijectivequestion : est-ce que F−1 est la fonction globale d’un AC ?
ThéorèmeOui !
Démonstration.
F−1 commute avec les décalages (facile)F−1 est continue (car F continue bijective sur un compact)le théorème de Hedlund permet de conclure
I Une preuve constructive sans l’outillage topologique ?
Automates cellulairesSystèmes dynamiques
I application du point de vue topologique
soit F la fonction globale d’un ACsupposons F bijectivequestion : est-ce que F−1 est la fonction globale d’un AC ?
ThéorèmeOui !
Démonstration.
F−1 commute avec les décalages (facile)F−1 est continue (car F continue bijective sur un compact)le théorème de Hedlund permet de conclure
I Une preuve constructive sans l’outillage topologique ?
Automates cellulairesSystèmes dynamiques
I application du point de vue topologique
soit F la fonction globale d’un ACsupposons F bijectivequestion : est-ce que F−1 est la fonction globale d’un AC ?
ThéorèmeOui !
Démonstration.
F−1 commute avec les décalages (facile)F−1 est continue (car F continue bijective sur un compact)le théorème de Hedlund permet de conclure
I Une preuve constructive sans l’outillage topologique ?
Automates cellulairesSystèmes dynamiques
I application du point de vue topologique
soit F la fonction globale d’un ACsupposons F bijectivequestion : est-ce que F−1 est la fonction globale d’un AC ?
ThéorèmeOui !
Démonstration.
F−1 commute avec les décalages (facile)F−1 est continue (car F continue bijective sur un compact)le théorème de Hedlund permet de conclure
I Une preuve constructive sans l’outillage topologique ?
Complètement déterminés mais imprévisibles !
I Connaissant une configuration, on peut calculer les suivantes
mais
si la configuration initiale n’est connue que partiellement ?
si l’on veut prédire des propriétés comme
est-ce qu’une couleur donnée disparaît toujours au boutd’un temps fini ?est-ce qu’un motif donné apparaîtra au centre en partantd’une configuration initiale donnée ?
I Imprévisibilitéschaos déterministeincalculabilité
Complètement déterminés mais imprévisibles !
I Connaissant une configuration, on peut calculer les suivantes
mais
si la configuration initiale n’est connue que partiellement ?
si l’on veut prédire des propriétés comme
est-ce qu’une couleur donnée disparaît toujours au boutd’un temps fini ?est-ce qu’un motif donné apparaîtra au centre en partantd’une configuration initiale donnée ?
I Imprévisibilitéschaos déterministeincalculabilité
Complètement déterminés mais imprévisibles !
I Connaissant une configuration, on peut calculer les suivantes
mais
si la configuration initiale n’est connue que partiellement ?
si l’on veut prédire des propriétés comme
est-ce qu’une couleur donnée disparaît toujours au boutd’un temps fini ?est-ce qu’un motif donné apparaîtra au centre en partantd’une configuration initiale donnée ?
I Imprévisibilitéschaos déterministeincalculabilité
Complètement déterminés mais imprévisibles !
I Connaissant une configuration, on peut calculer les suivantes
mais
si la configuration initiale n’est connue que partiellement ?
si l’on veut prédire des propriétés comme
est-ce qu’une couleur donnée disparaît toujours au boutd’un temps fini ?est-ce qu’un motif donné apparaîtra au centre en partantd’une configuration initiale donnée ?
I Imprévisibilitéschaos déterministeincalculabilité
Complètement déterminés mais imprévisibles !
I Connaissant une configuration, on peut calculer les suivantes
mais
si la configuration initiale n’est connue que partiellement ?
si l’on veut prédire des propriétés comme
est-ce qu’une couleur donnée disparaît toujours au boutd’un temps fini ?est-ce qu’un motif donné apparaîtra au centre en partantd’une configuration initiale donnée ?
I Imprévisibilitéschaos déterministeincalculabilité
Chaos déterministe
Henri Poincaré (1854-1912)« de petites causes peuvent avoir de grands effets »
sensibilité aux conditions initiales :
∃ε > 0,∀x ,∀δ > 0,∃y ,∃t : δ(x , y) ≤ δ et δ(F t(x), F t(y)
)≥ ε
expansivité :
∃ε > 0,∀x ,∀y , x 6= y ⇒ ∃t : δ(F t(x), F t(y)
)≥ ε
...
[démo]
Chaos déterministe
Henri Poincaré (1854-1912)« de petites causes peuvent avoir de grands effets »
sensibilité aux conditions initiales :
∃ε > 0,∀x ,∀δ > 0,∃y ,∃t : δ(x , y) ≤ δ et δ(F t(x), F t(y)
)≥ ε
expansivité :
∃ε > 0,∀x ,∀y , x 6= y ⇒ ∃t : δ(F t(x), F t(y)
)≥ ε
...
[démo]
Chaos déterministe
Henri Poincaré (1854-1912)« de petites causes peuvent avoir de grands effets »
sensibilité aux conditions initiales :
∃ε > 0,∀x ,∀δ > 0,∃y ,∃t : δ(x , y) ≤ δ et δ(F t(x), F t(y)
)≥ ε
expansivité :
∃ε > 0,∀x ,∀y , x 6= y ⇒ ∃t : δ(F t(x), F t(y)
)≥ ε
...
[démo]
Chaos déterministe
Henri Poincaré (1854-1912)« de petites causes peuvent avoir de grands effets »
sensibilité aux conditions initiales :
∃ε > 0,∀x ,∀δ > 0,∃y ,∃t : δ(x , y) ≤ δ et δ(F t(x), F t(y)
)≥ ε
expansivité :
∃ε > 0,∀x ,∀y , x 6= y ⇒ ∃t : δ(F t(x), F t(y)
)≥ ε
...
[démo]
Incalculabilité
DéfinitionUn problème P est un ensemble de questions Pn semblables,chacune portant sur un objet n d’une certaine famille
I Exemple :question Pn : l’entier n est pair ?problème P = n : Pn est vraie
DéfinitionUn problème est calculable s’il existe un algorithme qui, étantdonné n, répond sans erreur à la question Pn.
on peut rendre cette définition formelle et préciseil faut préciser sous quelle forme est donné n
I mauvaises nouvelles :il existe des problèmes incalculables
presque tous les problèmes liés aux AC sont incalculables !
Incalculabilité
DéfinitionUn problème P est un ensemble de questions Pn semblables,chacune portant sur un objet n d’une certaine famille
I Exemple :question Pn : l’entier n est pair ?problème P = n : Pn est vraie
DéfinitionUn problème est calculable s’il existe un algorithme qui, étantdonné n, répond sans erreur à la question Pn.
on peut rendre cette définition formelle et préciseil faut préciser sous quelle forme est donné n
I mauvaises nouvelles :il existe des problèmes incalculables
presque tous les problèmes liés aux AC sont incalculables !
Incalculabilité
DéfinitionUn problème P est un ensemble de questions Pn semblables,chacune portant sur un objet n d’une certaine famille
I Exemple :question Pn : l’entier n est pair ?problème P = n : Pn est vraie
DéfinitionUn problème est calculable s’il existe un algorithme qui, étantdonné n, répond sans erreur à la question Pn.
on peut rendre cette définition formelle et préciseil faut préciser sous quelle forme est donné n
I mauvaises nouvelles :il existe des problèmes incalculables
presque tous les problèmes liés aux AC sont incalculables !
Incalculabilité
DéfinitionUn problème P est un ensemble de questions Pn semblables,chacune portant sur un objet n d’une certaine famille
I Exemple :question Pn : l’entier n est pair ?problème P = n : Pn est vraie
DéfinitionUn problème est calculable s’il existe un algorithme qui, étantdonné n, répond sans erreur à la question Pn.
on peut rendre cette définition formelle et préciseil faut préciser sous quelle forme est donné n
I mauvaises nouvelles :il existe des problèmes incalculables
presque tous les problèmes liés aux AC sont incalculables !
Incalculabilité
DéfinitionUn problème P est un ensemble de questions Pn semblables,chacune portant sur un objet n d’une certaine famille
I Exemple :question Pn : l’entier n est pair ?problème P = n : Pn est vraie
DéfinitionUn problème est calculable s’il existe un algorithme qui, étantdonné n, répond sans erreur à la question Pn.
on peut rendre cette définition formelle et préciseil faut préciser sous quelle forme est donné n
I mauvaises nouvelles :il existe des problèmes incalculables
presque tous les problèmes liés aux AC sont incalculables !
Incalculabilité
DéfinitionUn problème P est un ensemble de questions Pn semblables,chacune portant sur un objet n d’une certaine famille
I Exemple :question Pn : l’entier n est pair ?problème P = n : Pn est vraie
DéfinitionUn problème est calculable s’il existe un algorithme qui, étantdonné n, répond sans erreur à la question Pn.
on peut rendre cette définition formelle et préciseil faut préciser sous quelle forme est donné n
I mauvaises nouvelles :il existe des problèmes incalculables
presque tous les problèmes liés aux AC sont incalculables !
Incalculabilité dans les AC
I Problèmes sur les ACF est représenté par sa définition syntaxiqueproblèmes comme ensembles de questions PF
I Des problèmes naturels1 est-ce que F est nilpotent ?
2 est-ce que F est sensible aux conditions initiales ?3 est-ce que F est réversible ?
I Résultats (Kari, années 90)1 et 2 sont incalculables3 est incalculable à partir de la dimension 2
Incalculabilité dans les AC
I Problèmes sur les ACF est représenté par sa définition syntaxiqueproblèmes comme ensembles de questions PF
I Des problèmes naturels1 est-ce que F est nilpotent ?
2 est-ce que F est sensible aux conditions initiales ?3 est-ce que F est réversible ?
I Résultats (Kari, années 90)1 et 2 sont incalculables3 est incalculable à partir de la dimension 2
Incalculabilité dans les AC
I Problèmes sur les ACF est représenté par sa définition syntaxiqueproblèmes comme ensembles de questions PF
I Des problèmes naturels1 est-ce que F est nilpotent ?
2 est-ce que F est sensible aux conditions initiales ?
3 est-ce que F est réversible ?
I Résultats (Kari, années 90)1 et 2 sont incalculables3 est incalculable à partir de la dimension 2
Incalculabilité dans les AC
I Problèmes sur les ACF est représenté par sa définition syntaxiqueproblèmes comme ensembles de questions PF
I Des problèmes naturels1 est-ce que F est nilpotent ?
2 est-ce que F est sensible aux conditions initiales ?3 est-ce que F est réversible ?
I Résultats (Kari, années 90)1 et 2 sont incalculables3 est incalculable à partir de la dimension 2
Incalculabilité dans les AC
I Problèmes sur les ACF est représenté par sa définition syntaxiqueproblèmes comme ensembles de questions PF
I Des problèmes naturels1 est-ce que F est nilpotent ?
2 est-ce que F est sensible aux conditions initiales ?3 est-ce que F est réversible ?
I Résultats (Kari, années 90)1 et 2 sont incalculables
3 est incalculable à partir de la dimension 2
Incalculabilité dans les AC
I Problèmes sur les ACF est représenté par sa définition syntaxiqueproblèmes comme ensembles de questions PF
I Des problèmes naturels1 est-ce que F est nilpotent ?
2 est-ce que F est sensible aux conditions initiales ?3 est-ce que F est réversible ?
I Résultats (Kari, années 90)1 et 2 sont incalculables3 est incalculable à partir de la dimension 2
Incalculabilité (suite)
notion d’ensemble limite ΩF
ΩF = x : ∀t ,∃y , F t(y) = x
P est un problème sur l’ensemble limite si
si ΩF = ΩG alors F ∈ P ⇐⇒ G ∈ P
P est trivial s’il contient tous les AC ou aucun AC
Théorème (Kari, années 1990)Tout problème non trivial sur l’ensemble limite est incalculable
I Exemples :est-ce qu’une couleur apparaît dans ΩF ?est-ce que ΩF est fini ?(en 1D) est-ce que l’ensemble des mots apparaissant dansΩF est un langage rationnel ?
Incalculabilité (suite)
notion d’ensemble limite ΩF
ΩF = x : ∀t ,∃y , F t(y) = x
P est un problème sur l’ensemble limite si
si ΩF = ΩG alors F ∈ P ⇐⇒ G ∈ P
P est trivial s’il contient tous les AC ou aucun AC
Théorème (Kari, années 1990)Tout problème non trivial sur l’ensemble limite est incalculable
I Exemples :est-ce qu’une couleur apparaît dans ΩF ?est-ce que ΩF est fini ?(en 1D) est-ce que l’ensemble des mots apparaissant dansΩF est un langage rationnel ?
Incalculabilité (suite)
notion d’ensemble limite ΩF
ΩF = x : ∀t ,∃y , F t(y) = x
P est un problème sur l’ensemble limite si
si ΩF = ΩG alors F ∈ P ⇐⇒ G ∈ P
P est trivial s’il contient tous les AC ou aucun AC
Théorème (Kari, années 1990)Tout problème non trivial sur l’ensemble limite est incalculable
I Exemples :est-ce qu’une couleur apparaît dans ΩF ?est-ce que ΩF est fini ?(en 1D) est-ce que l’ensemble des mots apparaissant dansΩF est un langage rationnel ?
Incalculabilité (suite)
notion d’ensemble limite ΩF
ΩF = x : ∀t ,∃y , F t(y) = x
P est un problème sur l’ensemble limite si
si ΩF = ΩG alors F ∈ P ⇐⇒ G ∈ P
P est trivial s’il contient tous les AC ou aucun AC
Théorème (Kari, années 1990)Tout problème non trivial sur l’ensemble limite est incalculable
I Exemples :est-ce qu’une couleur apparaît dans ΩF ?est-ce que ΩF est fini ?(en 1D) est-ce que l’ensemble des mots apparaissant dansΩF est un langage rationnel ?
Incalculabilité (suite)
notion d’ensemble limite ΩF
ΩF = x : ∀t ,∃y , F t(y) = x
P est un problème sur l’ensemble limite si
si ΩF = ΩG alors F ∈ P ⇐⇒ G ∈ P
P est trivial s’il contient tous les AC ou aucun AC
Théorème (Kari, années 1990)Tout problème non trivial sur l’ensemble limite est incalculable
I Exemples :est-ce qu’une couleur apparaît dans ΩF ?est-ce que ΩF est fini ?(en 1D) est-ce que l’ensemble des mots apparaissant dansΩF est un langage rationnel ?
Tous les AC ne sont pas complexes !
F est linéaire si
∃⊕ : F (x ⊕ y) = F (x)⊕ F (y)
le comportement de F sur toute configuration, se déduit deson comportement sur l’ensemble fini
∞0x0∞ : x état de F
on sait presque tout sur ce type d’automates
[démo]
Tous les AC ne sont pas complexes !
F est linéaire si
∃⊕ : F (x ⊕ y) = F (x)⊕ F (y)
le comportement de F sur toute configuration, se déduit deson comportement sur l’ensemble fini
∞0x0∞ : x état de F
on sait presque tout sur ce type d’automates
[démo]

Tous les AC ne sont pas complexes !
F est linéaire si
∃⊕ : F (x ⊕ y) = F (x)⊕ F (y)
le comportement de F sur toute configuration, se déduit deson comportement sur l’ensemble fini
∞0x0∞ : x état de F
on sait presque tout sur ce type d’automates
[démo]
Tous les AC ne sont pas complexes !
F est linéaire si
∃⊕ : F (x ⊕ y) = F (x)⊕ F (y)
le comportement de F sur toute configuration, se déduit deson comportement sur l’ensemble fini
∞0x0∞ : x état de F
on sait presque tout sur ce type d’automates
[démo]
Tous les AC ne sont pas complexes !
F est linéaire si
∃⊕ : F (x ⊕ y) = F (x)⊕ F (y)
le comportement de F sur toute configuration, se déduit deson comportement sur l’ensemble fini
∞0x0∞ : x état de F
on sait presque tout sur ce type d’automates
[démo]

Classifications
I Problématique
il n’y a pas de méthode générale pour analyser les ACcertains sont simples d’autres complexes et imprévisiblesles outils externes amènent aussi de l’incalculabilitéque faire ?
I Comparer les AC entre eux !notion de simulation F G si G peut reproduire le comportement de F« G est au moins aussi complexe que F »
I Définition précise de ?
2 ingrédientssous-automates et déformations de l’espace-temps
Classifications
I Problématiqueil n’y a pas de méthode générale pour analyser les ACcertains sont simples d’autres complexes et imprévisiblesles outils externes amènent aussi de l’incalculabilitéque faire ?
I Comparer les AC entre eux !notion de simulation F G si G peut reproduire le comportement de F« G est au moins aussi complexe que F »
I Définition précise de ?
2 ingrédientssous-automates et déformations de l’espace-temps
Classifications
I Problématiqueil n’y a pas de méthode générale pour analyser les ACcertains sont simples d’autres complexes et imprévisiblesles outils externes amènent aussi de l’incalculabilitéque faire ?
I Comparer les AC entre eux !notion de simulation F G si G peut reproduire le comportement de F« G est au moins aussi complexe que F »
I Définition précise de ?
2 ingrédientssous-automates et déformations de l’espace-temps
Classifications
I Problématiqueil n’y a pas de méthode générale pour analyser les ACcertains sont simples d’autres complexes et imprévisiblesles outils externes amènent aussi de l’incalculabilitéque faire ?
I Comparer les AC entre eux !notion de simulation F G si G peut reproduire le comportement de F« G est au moins aussi complexe que F »
I Définition précise de ?
2 ingrédientssous-automates et déformations de l’espace-temps
Classifications
I Problématiqueil n’y a pas de méthode générale pour analyser les ACcertains sont simples d’autres complexes et imprévisiblesles outils externes amènent aussi de l’incalculabilitéque faire ?
I Comparer les AC entre eux !notion de simulation F G si G peut reproduire le comportement de F« G est au moins aussi complexe que F »
I Définition précise de ?
2 ingrédientssous-automates et déformations de l’espace-temps
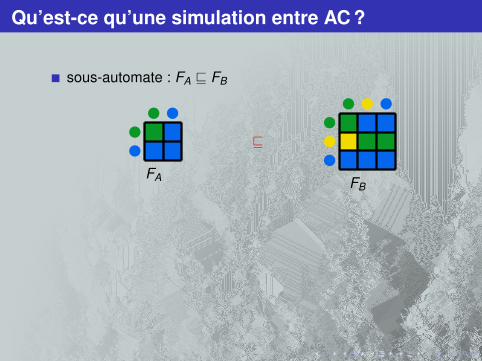
Qu’est-ce qu’une simulation entre AC ?
sous-automate : FA v FB
(restriction compatible)
FA
v
FB
déformations de l’espace temps : F → F<
t
,
z
,
m
>
1 compression du temps
2 décalage régulier du réseau
3 groupage de cellules en blocs
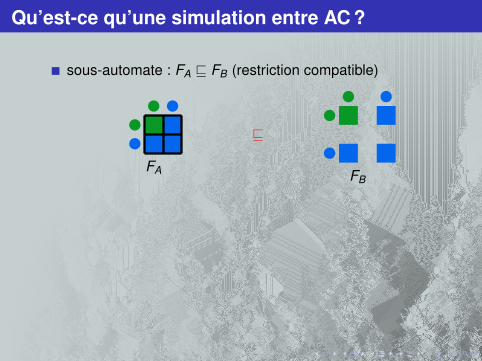
Qu’est-ce qu’une simulation entre AC ?
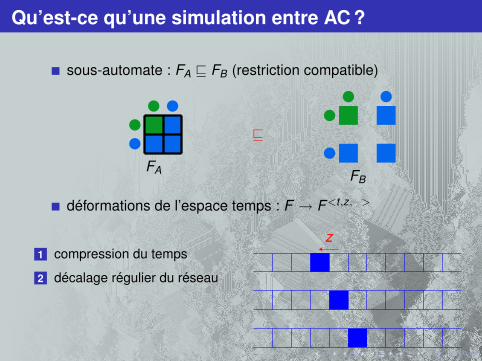
sous-automate : FA v FB (restriction compatible)
FA
v
FB
déformations de l’espace temps : F → F<
t
,
z
,
m
>
1 compression du temps
2 décalage régulier du réseau
3 groupage de cellules en blocs
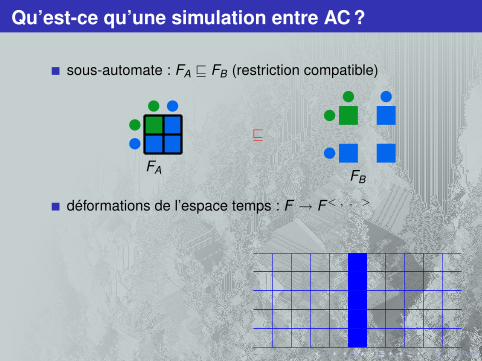
Qu’est-ce qu’une simulation entre AC ?
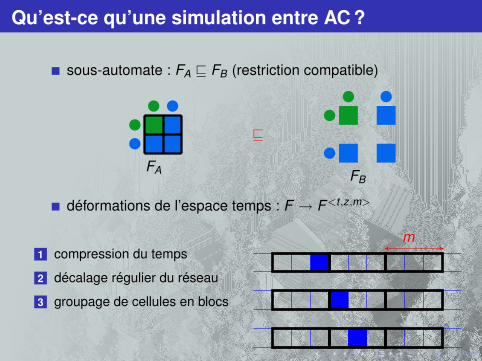
sous-automate : FA v FB (restriction compatible)
FA
v
FB
déformations de l’espace temps : F → F<
t
,
z
,
m
>
1 compression du temps
2 décalage régulier du réseau
3 groupage de cellules en blocs
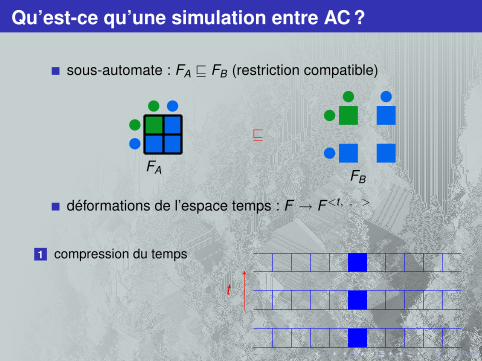
Qu’est-ce qu’une simulation entre AC ?
sous-automate : FA v FB (restriction compatible)
FA
v
FB
déformations de l’espace temps : F → F<t ,
z
,
m
>
1 compression du temps
2 décalage régulier du réseau
3 groupage de cellules en blocs
t
Qu’est-ce qu’une simulation entre AC ?
sous-automate : FA v FB (restriction compatible)
FA
v
FB
déformations de l’espace temps : F → F<t ,z,
m
>
1 compression du temps
2 décalage régulier du réseau
3 groupage de cellules en blocs
z
Qu’est-ce qu’une simulation entre AC ?
sous-automate : FA v FB (restriction compatible)
FA
v
FB
déformations de l’espace temps : F → F<t ,z,m>
1 compression du temps
2 décalage régulier du réseau
3 groupage de cellules en blocs
m

Qu’est-ce qu’une simulation entre AC ?
DéfinitionF G si il existe 2 transformations < t , z, m > et < t ′, z ′, m′ >avec
F<t ,z,m> v G<t ′,z′,m′>
I Propriétés :l’automate a 1 état est un minimum globalles AC linéaires sont en bas de l’ordreil existe des chaînes infinies croissantes
I Et le haut de l’ordre ?
Qu’est-ce qu’une simulation entre AC ?
DéfinitionF G si il existe 2 transformations < t , z, m > et < t ′, z ′, m′ >avec
F<t ,z,m> v G<t ′,z′,m′>
I Propriétés :l’automate a 1 état est un minimum globalles AC linéaires sont en bas de l’ordreil existe des chaînes infinies croissantes
I Et le haut de l’ordre ?
Qu’est-ce qu’une simulation entre AC ?
DéfinitionF G si il existe 2 transformations < t , z, m > et < t ′, z ′, m′ >avec
F<t ,z,m> v G<t ′,z′,m′>
I Propriétés :l’automate a 1 état est un minimum globalles AC linéaires sont en bas de l’ordreil existe des chaînes infinies croissantes
I Et le haut de l’ordre ?
Universalité intrinsèque
DéfinitionFA est -universel si ∀FB : FB FA
ThéorèmeIl existe des automates -universels.
Démonstration.
I Exemple en 2D ?
[démo]
Universalité intrinsèque
DéfinitionFA est -universel si ∀FB : FB FA
ThéorèmeIl existe des automates -universels.
Démonstration.
I Exemple en 2D ?
[démo]
Universalité intrinsèque
DéfinitionFA est -universel si ∀FB : FB FA
ThéorèmeIl existe des automates -universels.
Démonstration.
I Exemple en 2D ?
[démo]
Universalité intrinsèque
DéfinitionFA est -universel si ∀FB : FB FA
ThéorèmeIl existe des automates -universels.
Démonstration.
I Exemple en 2D ?
[démo]
Universalité intrinsèque
PropositionSi FA × FB est universel, alors FA ou FB l’est.
ThéorèmeSavoir si un automate est -universel est incalculable.
CorollaireSi FA n’est pas -universel, alors il existe une chaîne infiniecroissante au dessus de lui.
Universalité intrinsèque
PropositionSi FA × FB est universel, alors FA ou FB l’est.
ThéorèmeSavoir si un automate est -universel est incalculable.
CorollaireSi FA n’est pas -universel, alors il existe une chaîne infiniecroissante au dessus de lui.
Universalité intrinsèque
PropositionSi FA × FB est universel, alors FA ou FB l’est.
ThéorèmeSavoir si un automate est -universel est incalculable.
CorollaireSi FA n’est pas -universel, alors il existe une chaîne infiniecroissante au dessus de lui.
Des questions ?