approximation par splines polynomiales en...
TRANSCRIPT
Approximation par splines polynomiales ennorme L1
Laurent Gajny
LSIS - UMR CNRS 7296, Équipe INSMArts et Métiers ParisTech,8 Boulevard Louis XIV, 59046 Lille, France
RÉSUMÉ. Dans cet article, nous traitons le problème d’approximation de nuages de points parune courbe spline ou surface au sens de la norme L1 avec contrôle de déviation maximal.L’utilisation de cette norme permet de préserver la forme des données même en cas de chan-gement brutal de celle-ci. Dans nos précédents travaux, nous avons introduit une méthode parfenêtre glissante de cinq points pour l’approximation courbe spline L1 et une méthode de croixglissante de neuf points pour l’approximation surface spline L1 de données type grille. Malgréleur complexité linéaire, ces méthodes peuvent demeurer lentes lorsqu’elles sont appliquées surun large flot de données. Sur la base de résultats algébriques sur l’approximation L1 sur unnombre restreint de données, nous proposons des méthodes reposant sur des fenêtres de tailleinférieure et nous comparons les différentes méthodes.
ABSTRACT. In this article, we adress the problem of approximating scattered data points by C1-smooth polynomial spline curves and surfaces using L1-norm optimization and maximal devi-ation constraints. The use of this norm helps us to preserve the shape of the data even nearto abrupt changes. In our previous work, we introduced a five-point sliding window processfor L1 spline curve approximation and a nine-point cross sliding window process for L1 splinesurface approximation of grid datasets. Nethertheless, these methods can be still time consum-ing despite their linear complexity. Consequently, based on algebraic results obtained for L1
approximation on restricted sets of points in both planar and spatial cases, we define methodswith smaller windows and we lead a comparison between the methods.
MOTS-CLÉS : Spline L1, approximation, méthode algébrique, préservation de forme, least abso-lute deviation, données bruitées.
KEYWORDS: L1 spline, approximation, algebraic method, shape preserving properties, least ab-solute deviation, noisy data.
Dixièmes journées des doctorants du LSIS, pages 1 à 12

2 Dixièmes journées des doctorants du LSIS
1. Introduction
L’approximation de nuages de points est un problème important dans de nombreuxdomaines d’application tels la modélisation de terrain ou le traitement d’images. Dansces problèmes de modélisation, une exigence classique est que les courbes ou sur-faces générées possèdent des propriétés de conservation de forme. Ceci signifie queles courbes ou surfaces expriment les propriétés géométriques des données en accordavec la perception humaine. Lorsqu’on observe un changement brutal d’altitude oud’espacement dans les données, les méthodes classiques d’approximation au sens desmoindres carrés mènent à des oscillations. Ce phénomène peut être corrigé par unelarge gamme de procédures telle qu’une intervention humaine sur le choix et la posi-tion des nœuds ou l’introduction de contraintes additionnelles.
Au cours des douze dernières années, les splines L1 introduites par John E. Laveryet ses collaborateurs ont démontré une grande efficacité sur les problèmes d’optimisa-tion globale d’interpolation et d’approximation (voir (Lavery, 2000b, Lavery, 2000a)).Ces méthodes corrigent le phénomène d’oscillation sans contraintes additionnelles.Dans (Nyiri et al., 2011), les auteurs ont proposé le passage d’un traitement global àun traitement local des données en introduisant un processus de fenêtre glissante. Enconsidérant des fenêtres de cinq points consécutifs pour l’interpolation par une courbespline, ils ont proposé une méthode de complexité linéaire et rapide car algébriqueavec de meilleures qualités de préservation de forme.
Après un bref état de l’art, le travail présenté étend le procédé de fenêtre glissanteau cadre de l’approximation spline pour un choix original de fonctionnelle de mini-misation. Ce choix permet, contrairement aux méthodes existantes, de contrôler l’in-fluence des paramètres de la fonctionnelle de minimisation. Je présente ici plusieursméthodes de résolutions pour des fenêtres de taille différente et mène une comparaisonentre elles.
2. Un bref état de l’art sur l’approximation L1 de données discrètes
Le modèle le plus simple d’approximation d’un nuage de points par un objet géo-métrique continu est la régression linéaire. Soient les points (xi, yi), i = 1, . . . , n, leproblème de régression linéaire au sens de la norme Lp s’écrit :
mina,b∈R
n∑i=1
|yi − (axi + b)|p.
Pour p = 2, il s’agit de la méthode des moindres carrées qui admet une solution uniquea∗ = cov(x,y)
σ2x
, b∗ = y − a∗x. Pour p = 1, c’est la méthode least absolute deviation(LAD) introduite par Galilée en 1632. Lorsque les données ne sont que peu perturbées,les solutions L1 et L2 sont similaires. Mais lorsque celles-ci sont perturbées par unpoint aberrant, on constate que la méthode LAD est plus robuste que la méthode L2
(Figure 1.a). De plus, lorsque nous avons une perturbation de type clutter, un ensembleorganisé de points aberrants, on observe que la solution L2 est corrompue fortementau contraire de la solution L1 qui ignore cette perturbation (Figure 1.b).

Approximation spline L1 3
a. Présence d’un point aberrant b. Présence d’un clutter
Figure 1. Comparaison entre la méthode des moindres carrés et la méthode LAD.
Afin d’étudier des modèles plus élaborés d’approximation, on se tourne vers leformalisme spline. Il existe une théorie d’approximation L1 par des polynômes (Rice,1964) mais nous ne la détaillons pas ici. Nous nous concentrons sur le problème d’ap-proximation au sens Lp de données pi = (xi, yi), i = 1, . . . , n par spline polynomialede nœuds uj , j = 1, . . . ,m (m ≤ n) dont la formulation est la suivante :
infγ∈S
∫ xn
x1
∣∣∣∣d2γdx2(x)
∣∣∣∣p dxsous les contraintes C,
[1]
où S est l’espace de courbes considéré et C un ensemble de contraintes par rapportaux points pi. Considérons dans un premier temps que C soient les conditionsd’interpolation γ(xi) = yi. Ainsi, pour S = C2([x1, xn]) et p = 2, on montre quele problème [1] devient le problème classique d’interpolation par spline cubique(De Boor, 2001). John E. Lavery a étudié un problème similaire pour p = 1 etS l’ensemble des splines cubiques C1 (Lavery, 2000b). Cette approche permet decorriger le phénomène d’oscillation observé lors de changement brusque de la formedes données pour l’interpolation L2 (voir Figure 2a).
a. b.
Figure 2. Interpolation (a.) et approximation (b.) au sens L2 (en pointillés bleus) etL1 (ligne pleine rouge) (α = 0.25).
4 Dixièmes journées des doctorants du LSIS
La constatation est la même lorsqu’on relâche les contraintes d’interpolation (voirFigure 2b). Une approche classique est alors de résoudre le problème régularisé sui-vant :
minγ∈S
α
∫ xn
x1
∣∣∣∣d2γdx2(x)
∣∣∣∣p dx+ (1− α)n∑
i=1
|γ(xi)− yi|p, α ≥ 0.
L’inconvénient de cette approche, quelque soit la norme choisie, est le réglage duparamètre α. Plus celui-ci est petit, plus la solution courbe sera proche des données.Cependant, on ne peut quantifier cette notion de proximité. Nous proposons dans lasection suivante une approche pour corriger ce manque de contrôle.
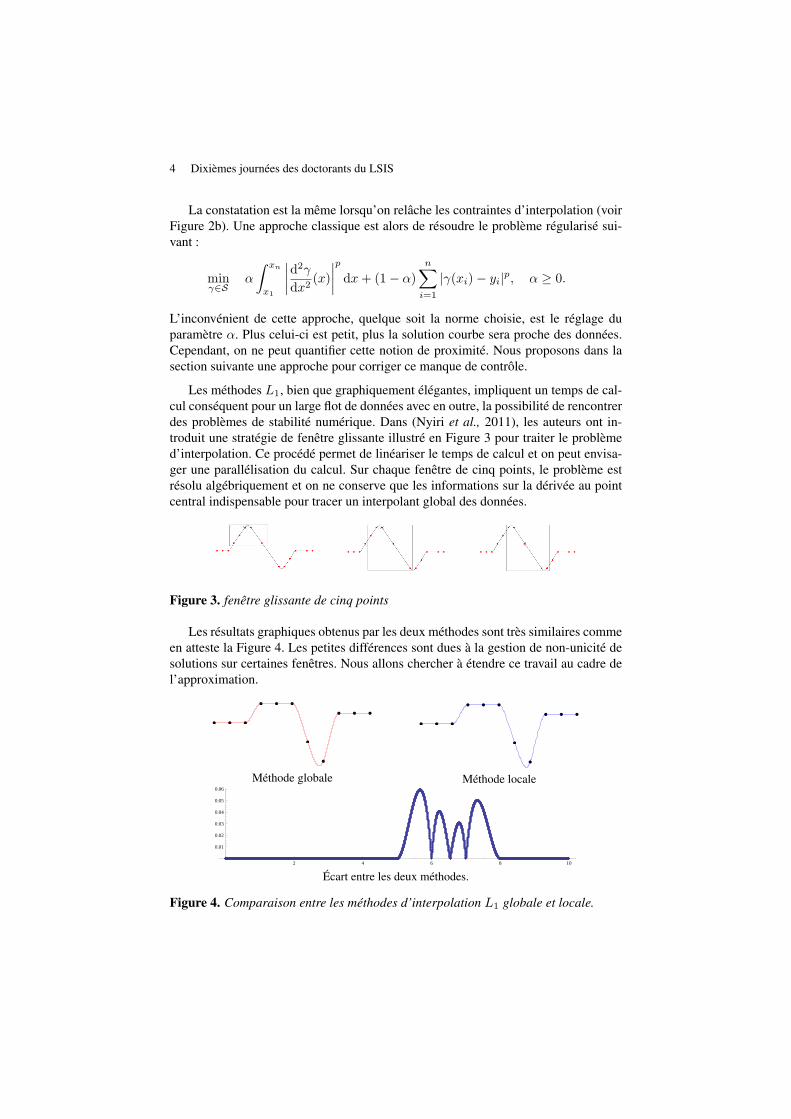
Les méthodes L1, bien que graphiquement élégantes, impliquent un temps de cal-cul conséquent pour un large flot de données avec en outre, la possibilité de rencontrerdes problèmes de stabilité numérique. Dans (Nyiri et al., 2011), les auteurs ont in-troduit une stratégie de fenêtre glissante illustré en Figure 3 pour traiter le problèmed’interpolation. Ce procédé permet de linéariser le temps de calcul et on peut envisa-ger une parallélisation du calcul. Sur chaque fenêtre de cinq points, le problème estrésolu algébriquement et on ne conserve que les informations sur la dérivée au pointcentral indispensable pour tracer un interpolant global des données.
Figure 3. fenêtre glissante de cinq points
Les résultats graphiques obtenus par les deux méthodes sont très similaires commeen atteste la Figure 4. Les petites différences sont dues à la gestion de non-unicité desolutions sur certaines fenêtres. Nous allons chercher à étendre ce travail au cadre del’approximation.
Méthode globale Méthode locale
2 4 6 8 10
0.01
0.02
0.03
0.04
0.05
0.06
Écart entre les deux méthodes.
Figure 4. Comparaison entre les méthodes d’interpolation L1 globale et locale.

Approximation spline L1 5
3. Problème d’approximation L1C1 δ-controllé
Dans cette section, j’introduis le problème d’approximation L1 δ-controllé par unecourbe spline de régularité C1. Le théorème suivant définit ce problème1.
Théorème 1. Soient pi = (xi, yi), i = 1, 2, . . . , n, n points dans R2 tels que x1 <x2 < · · · < xn, une subdivision u = (ui)
mi=1 telle que u ⊆ (xi)
ni=1 et δ > 0. Si S3,u
représente l’espace vectoriel des splines cubiques C1 de nœuds u, alors :
infγ∈S3,u
∫ um
u1
∣∣∣∣dγ2
du2(u)
∣∣∣∣du [2]
tel que |γ(xi)− yi| ≤ δ, i = 1, 2, . . . , n, [3]
existe et est atteint.
Ce résultat est prouvé dans (Gajny et al., 2013b). Les contraintes [3] permettent decontrôler la déviation maximale de la solution aux points de données. Le placementdes nœuds u étant un problème difficile en général, nous considérons m = n. Ainsi,le problème [2]-[3] s’écrit aussi :
minQ,B∈(R)n
n−1∑i=1
∫ 12
− 12
|∆bi + 6t(bi + bi+1 −2
∆ui∆qi)| dt, [4]
tel que |qi − pi| ≤ δ, i = 1, 2, . . . , n, [5]
où Q = {qi}i=1,...,n sont tels que γ(ui) = qi, i = 1, . . . , n et B = {bi}i=1,...,n
sont les dérivées premières associées (voir Figure 5). La proposition suivante issue de(Gajny et al., 2013a) résout algébriquement le problème [4]-[5] dans le cas n = 3.
Figure 5. Les notations du problème [4]-[5], les voisinages centrés aux points de don-nées définis par [3] et une courbe spline solution [4]-[5].
1. Nous présentons ici une version planaire non-paramétrique pour plus de simplicité. Une ver-sion paramétrique dans Rd est introduite dans (Gajny et al., 2013b)

6 Dixièmes journées des doctorants du LSIS
Proposition 1. Soient pi = (xi, yi), i = 1, 2, 3 trois points de R2, h1 et h2 les deuxpentes associées et δ > 0. Les solutions de [4]-[5] sont des droites si et seulement si :
y3 − y1x3 − x1
(x2 − x1) + y1 − 2δ ≤ y2 ≤ y3 − y1x3 − x1
(x2 − x1) + y1 + 2δ. [6]
Sinon, les solutions interpolent les points : (x1, y1 + sign(h1 − h2)δ), (x2, y2 −sign(h1 − h2)δ), (x3, y3 + sign(h1 − h2)δ).
[6] est satisfaite [6] n’est pas satisfaite
Figure 6. Les deux cas possibles dans l’algorithme à 3 points et une solution d’ap-proximation L1C
1
La condition [6] signifie qu’il existe une droite intersectant les voisinages centrésen p1, p2 et p3. Celle-ci est illustrée en Figure 6.
4. Fenêtres glissantes pour l’approximation L1C1 par une courbe spline
Pour réduire le temps de calcul par rapport aux approches globales de Lavery,j’utilise un procédé de fenêtre glissante. Je présente dans cette section deux choix defenêtres pour des données planaires 2.
4.1. Méthode numérique par fenêtre glissante de cinq points
L’algorithme par fenêtre glissante de cinq points est directement inspiré de (Nyiriet al., 2011) où le problème de l’interpolation L1 est ainsi traité. Cette méthode est pré-sentée en détails dans (Gajny et al., 2013b). Dans le cas de l’interpolation, le problèmed’optimisation sur cinq points est résolu algébriquement. Ceci s’avère beaucoup pluscomplexe pour l’approximation puisque les points de passage aux nœuds, les pointsd’approximation, sont maintenant des inconnues. Le problème d’approximation com-porte donc deux fois plus d’inconnues que le problème d’interpolation. On résoutdonc numériquement le problème. Le Lagrangien du problème [7]-[8] n’étant pas dif-férentiable partout, nous n’utilisons pas une méthode de multiplicateurs de Lagrange.Nous allons considérer le problème régularisé associé. La proposition suivante permetd’établir ce problème.
2. L’étude de ce cas est suffisant même pour des données dans Rd. Dans ce cas, les donnéessont paramétrisées et on effectue une minimisation de type planaire dans chaque direction.
Approximation spline L1 7
Proposition 2. Le problème [2]-[3] est équivalent à :
minγ∈S3,u
∫ um
u1
∣∣∣∣dγ2
du2(u)
∣∣∣∣du [7]
tel quen∑
i=1
|γ(xi)− yi − δ|+ |γ(xi)− yi + δ| = 2nδ. [8]
Cette proposition est démontrée dans (Gajny et al., 2013b). On peut en déduireune version régularisée simple de [2]-[3] dont on vérifie la cohérence dans le résultatsuivant.
Théorème 2. Sous les notations du Théorème 1 et avec λ un réel strictement positif,alors :
infγ∈S3,u
∫ um
u1
∣∣∣∣d2γdu2(u)
∣∣∣∣du+ λn∑
i=1
|γ(xi)− yi − δ|+ |γ(xi)− yi + δ| [9]
existe et est atteint.
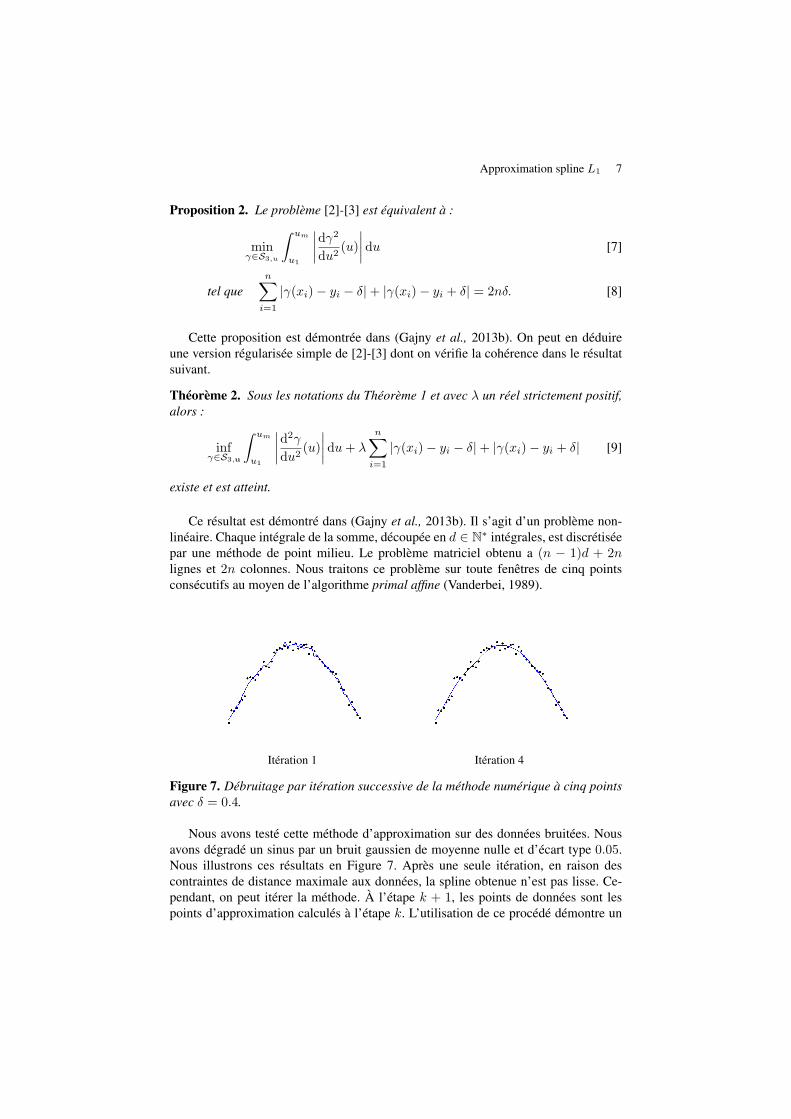
Ce résultat est démontré dans (Gajny et al., 2013b). Il s’agit d’un problème non-linéaire. Chaque intégrale de la somme, découpée en d ∈ N∗ intégrales, est discrétiséepar une méthode de point milieu. Le problème matriciel obtenu a (n − 1)d + 2nlignes et 2n colonnes. Nous traitons ce problème sur toute fenêtres de cinq pointsconsécutifs au moyen de l’algorithme primal affine (Vanderbei, 1989).
Itération 1 Itération 4
Figure 7. Débruitage par itération successive de la méthode numérique à cinq pointsavec δ = 0.4.
Nous avons testé cette méthode d’approximation sur des données bruitées. Nousavons dégradé un sinus par un bruit gaussien de moyenne nulle et d’écart type 0.05.Nous illustrons ces résultats en Figure 7. Après une seule itération, en raison descontraintes de distance maximale aux données, la spline obtenue n’est pas lisse. Ce-pendant, on peut itérer la méthode. À l’étape k + 1, les points de données sont lespoints d’approximation calculés à l’étape k. L’utilisation de ce procédé démontre un

8 Dixièmes journées des doctorants du LSIS
phénomène de lissage tout en conservant la forme des données initiales. Cependant,la résolution de la séquence de problèmes locaux peut être relativement longue surun grand flot de données. Afin de réduire le temps de calcul, on réduit la taille dela fenêtre. Nous présentons une méthode à trois points qui tire profit de la résolutionalgébrique présentée en Proposition 1.
4.2. Méthode quasi-algébrique par fenêtre glissante de trois points
L’algorithme pour la méthode à trois points est composé de deux étapes majeures.La première étape calcule les points d’approximation q⋆i au regard de la Proposition1. La deuxième étape calcule les dérivées première par interpolation L1C
1 de cespoints q⋆i . Nous choisissons cette approche car le faisceau de dérivées possible pourune résolution sur trois points est large en général. Il est difficile de chosir une valeurcohérente quand on ne considère que deux voisins directs. La méthode d’interpolationL1C
1 étant algébrique, l’algorithme n’est pas pénalisé en temps de calcul.
Les deux cas à considérer dans cette méthode sont illustrés en figure 6. Lorsque [6]n’est pas satisfaite, on obtient immédiatement le point d’approximation au centre dela fenêtre par application de la Proposition 1. Lorsque [6] est satisfaite, les solutionsdu problème sont un ensemble de droite qui est en général infini. Nous devons doncdégager dans cet ensemble l’une des plus cohérentes. Pour cela, on considère desvoisins supplémentaires. Nous passons alors d’une fenêtre de trois points à une fenêtrede cinq points et on introduit la méthode de régression linéaire L1 contrôlée :
mina,b∈R
5∑i=1
ωi (|yi − δ − axi − b|+ |yi + δ − axi − b|) . [10]
On choisit ω2 = ω3 = ω4 > ω1 = ω5 = 1. Ainsi, s’il existe une droite intersectantles trois voisinages centraux, alors les solutions de [10] auront cette propriété. Ceproblème peut être résolu par primal affine.
Itération 1 Itération 4
Figure 8. Débruitage par itération successive de la méthode quasi-algébrique à troispoints avec δ = 0.4.
Approximation spline L1 9
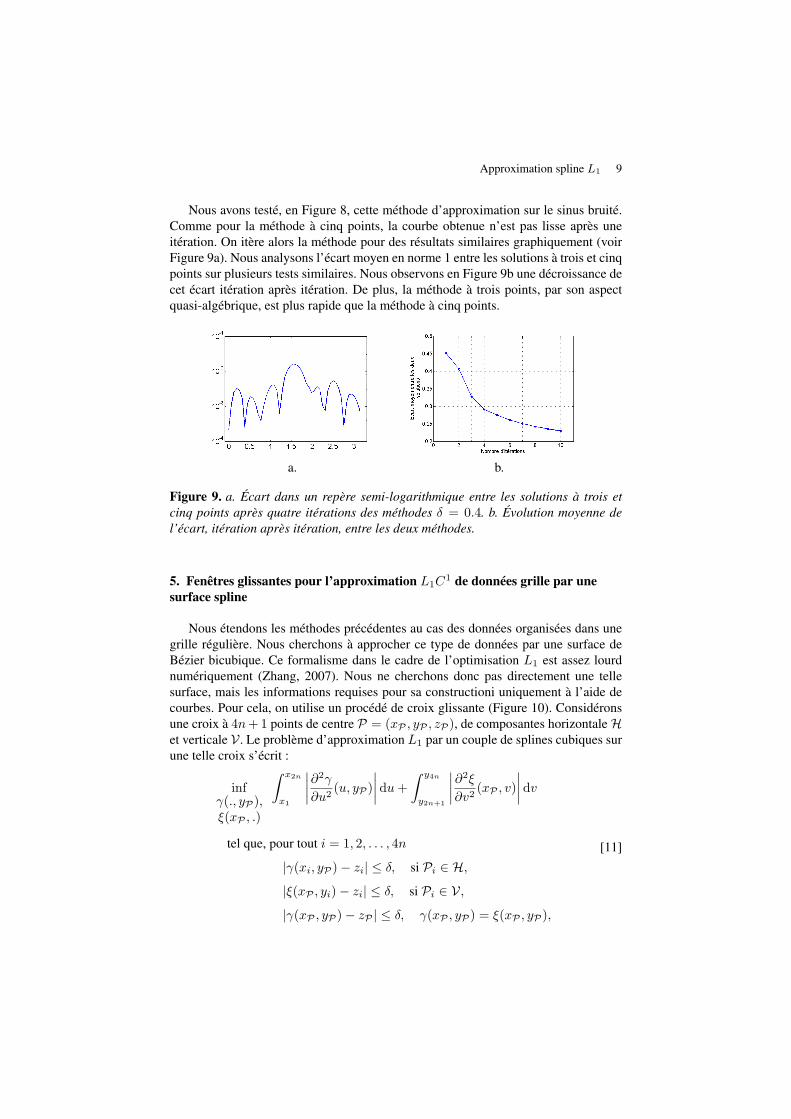
Nous avons testé, en Figure 8, cette méthode d’approximation sur le sinus bruité.Comme pour la méthode à cinq points, la courbe obtenue n’est pas lisse après uneitération. On itère alors la méthode pour des résultats similaires graphiquement (voirFigure 9a). Nous analysons l’écart moyen en norme 1 entre les solutions à trois et cinqpoints sur plusieurs tests similaires. Nous observons en Figure 9b une décroissance decet écart itération après itération. De plus, la méthode à trois points, par son aspectquasi-algébrique, est plus rapide que la méthode à cinq points.
a. b.
Figure 9. a. Écart dans un repère semi-logarithmique entre les solutions à trois etcinq points après quatre itérations des méthodes δ = 0.4. b. Évolution moyenne del’écart, itération après itération, entre les deux méthodes.
5. Fenêtres glissantes pour l’approximation L1C1 de données grille par une
surface spline
Nous étendons les méthodes précédentes au cas des données organisées dans unegrille régulière. Nous cherchons à approcher ce type de données par une surface deBézier bicubique. Ce formalisme dans le cadre de l’optimisation L1 est assez lourdnumériquement (Zhang, 2007). Nous ne cherchons donc pas directement une tellesurface, mais les informations requises pour sa constructioni uniquement à l’aide decourbes. Pour cela, on utilise un procédé de croix glissante (Figure 10). Considéronsune croix à 4n+1 points de centre P = (xP , yP , zP), de composantes horizontale Het verticale V . Le problème d’approximation L1 par un couple de splines cubiques surune telle croix s’écrit :
infγ(., yP),ξ(xP , .)
∫ x2n
x1
∣∣∣∣∂2γ
∂u2(u, yP)
∣∣∣∣du+
∫ y4n
y2n+1
∣∣∣∣∂2ξ
∂v2(xP , v)
∣∣∣∣dvtel que, pour tout i = 1, 2, . . . , 4n
|γ(xi, yP)− zi| ≤ δ, si Pi ∈ H,
|ξ(xP , yi)− zi| ≤ δ, si Pi ∈ V,
|γ(xP , yP)− zP | ≤ δ, γ(xP , yP) = ξ(xP , yP),
[11]

10 Dixièmes journées des doctorants du LSIS
avec δ un réel strictement positif. On peut montrer, en suivant la même démonstrationque dans le cas courbe, que le minimum de [11] existe et est atteint.
Figure 10. Croix de neuf points et notations pour l’approximation de données dansune grille régulière.
5.1. Méthode numérique par croix glissante de neuf points
L’équivalent surfacique de la méthode courbe à cinq points est la méthode parcroix glissante de neuf points illustrée en Figure 10. Étant donné la complexité duproblème, nous optons pour une résolution numérique. Comme dans le cas courbe,nous pouvons appliquer la méthode itérativement sur des données bruitées. Nousappliquons la méthode sur une image bruitée, avec un ratio signal à bruit de 25dB, enFigure 11.
Image originale Image bruitée Itération 1 Itération 2
Figure 11. Expérience de débruitage avec la méthode de croix glissante à neuf pointsavec δ = 4.
Nous obtenons de bons résultats graphiques. Nous conservons notamment lescontours et nous lissons les parties uniformes de l’image. De plus, la complexité de laméthode est linéaire. Cependant, la résolution étant purement numérique, on ne peutgarantir un résultat dans un temps raisonnable. Nous réduisons dans la section suivantla taille de la fenêtre et comparons les résultats pour les deux méthodes.

Approximation spline L1 11
5.2. Méthode quasi-algébrique par croix glissante de cinq points
On se tourne dans cette section vers une croix glissante de cinq points. On montredans (Gajny et al., 2013a) que le problème [11] s’écrit dans le cas d’une croix de cinqpoints sous la forme suivante :
minq,q1,q2,q3,q4
∣∣∣∣ q − q1x− x1
− q3 − q
x3 − x
∣∣∣∣ +
∣∣∣∣ q − q2y − y2
− q4 − q
y4 − y
∣∣∣∣tel que |qi − zi| ≤ δ, i = 1, 3, et |q − z| ≤ δ,
[12]
où les qi sont les altitudes des points d’approximation recherchés. La proposition sui-vante issue de (Gajny et al., 2013a) résout ce problème dans certains cas.
Proposition 3. Soit une croix à cinq points dans R3 de centre P = (xP , yP , zP) etde composantes :
H = {Pi = (xi, yP , zi), i = 1, 2}∪P, V = {Pi = (xP , yi, zi), i = 3, 4}∪P.
Soient les pentes h1 = zP−z1xP−x1
, h2 = z2−zPx2−xP
, h3 = zP−z3yP−y3
, h4 = z4−zPy4−yP
et :
δ > 0, α =z2 − z1x2 − x1
(xP − x1) + z1 et β =z4 − z3y4 − y3
(yP − y4) + z4.
Si zP /∈ [α− 2δ, α+2δ] et zP /∈ [β− 2δ, β+2δ], alors les solutions du problème[12] satisfont la règle suivante :
– Si h1 < h2 et h3 < h4, alors qP = zP + δ, qi = zi − δ, i = 1, 2, 3, 4.
– Si h1 > h2 et h3 > h4, alors qP = zP − δ, qi = zi + δ, i = 1, 2, 3, 4.
– Si h1 < h2 et h3 > h4, alors qP ∈ [zP − δ, zP + δ], qi = zi − δ pour i = 1, 2et qi = zi + δ pour i = 3, 4.
– Si h1 > h2 et h3 < h4, alors qP ∈ [zP − δ, zP + δ], qi = zi + δ pour i = 1, 2et qi = zi − δ pour i = 3, 4.
Méthode à cinq points Méthode à neuf points
Figure 12. Expérience de débruitage avec la méthode à cinq points et neuf points.
Dans le cas contraire à la proposition, nous résolvons le problème numériquement.Le problème matriciel est néanmoins de taille bien inférieure au problème sur neufpoints. En effet, il est de taille 12× 5 sur chaque fenêtre contre (8d+19)× 10 pour la

12 Dixièmes journées des doctorants du LSIS
méthode à neuf points3. Cette méthode a été comparée à la précédente sur une imagebruitée (voir Figure 12). Au delà du gain en temps de calcul, nous obtenons de bonsrésultats graphiques et de meilleures valeurs de PSNR que la méthode précédente.
6. Conclusion
Dans cet article, nous avons testé et comparé des méthodes d’approximation L1 àfenêtre de tailles diverses. La méthode à trois points pour les courbes et la méthode àcinq points pour les surfaces tensorielles sont les plus rapides par leur aspect quasi-algébrique. De plus, elle démontre des résultats graphiques similaires aux méthodes àfenêtres plus larges envisagées en début de thèse. L’utilisation de la méthode à troispoints dans un contexte de robotique collaborative via le système de vision leap mo-tion est en cours. Une extension possible du travail présenté consiste au traitementde données désorganisées dans l’espace. Enfin, en collaboration avec John E. Lavery,nous travaillons au problème d’approximation L1 δ-contrôlée de fonctions continuesafin d’établir un bagage théorique complet en approximation L1.
7. Bibliographie
De Boor C., A practical guide to splines, Applied mathematical sciences, Springer-Verlag, NewYork, 2001.
Gajny L., Nyiri E., Gibaru O., « Approximation spline L1C1 par fenêtres glissantes pour le
signal et l’image », Journées du Groupe de Travail en Modélisation Géométrique, 2013a.
Gajny L., Nyiri E., Gibaru O., « L1C1 polynomial spline approximation algorithms for large
scattered data sets », Soumis, January, 2013b.
Lavery J. E., « Shape-preserving, multiscale fitting of univariate data by cubic L1 smoothingsplines », Computer Aided Geometric Design, vol. 17, n˚ 7, p. 715-727, August, 2000a.
Lavery J. E., « Univariate cubic Lp splines and shape-preserving, multiscale interpolation byunivariate cubic L1 splines », Computer Aided Geometric Design, vol. 17, n˚ 4, p. 319-336,April, 2000b.
Nyiri E., Gibaru O., Auquiert P., « Fast Lk1C
k polynomial spline interpolation algorithm withshape-preserving properties », Computer Aided Geometric Design, vol. 28, n˚ 1, p. 65-74,January, 2011.
Rice J. R., The Approximation of functions. Volume 1. , Linear theory, Addison-Wesley series incomputer science and information processing, Addison-Wesley, Reading (Mass), Palo Alto,London, 1964.
Vanderbei R. J., « Affine-scaling for linear programs with free variables », Math. Program., vol.43, n˚ 1, p. 31-44, January, 1989.
Zhang W., Bivariate cubic L1 splines and applications, PhD thesis, North Carolina State Uni-versity, 2007.
3. 1/d est le pas de discrétisation des intégrales
ANNEXE POUR LE SERVICE FABRICATIONA FOURNIR PAR LES AUTEURS AVEC UN EXEMPLAIRE PAPIERDE LEUR ARTICLE ET LE COPYRIGHT SIGNE PAR COURRIER
LE FICHIER PDF CORRESPONDANT SERA ENVOYE PAR E-MAIL
1. ARTICLE POUR LA REVUE :
Dixièmes journées des doctorants du LSIS
2. AUTEURS :
Laurent Gajny
3. TITRE DE L’ARTICLE :
Approximation par splines polynomiales en norme L1
4. TITRE ABRÉGÉ POUR LE HAUT DE PAGE MOINS DE 40 SIGNES :
Approximation spline L1
5. DATE DE CETTE VERSION :
5 avril 2013
6. COORDONNÉES DES AUTEURS :
– adresse postale :LSIS - UMR CNRS 7296, Équipe INSMArts et Métiers ParisTech,8 Boulevard Louis XIV, 59046 Lille, [email protected]
– téléphone : 00 00 00 00 00– télécopie : 00 00 00 00 00– e-mail : [email protected]
7. LOGICIEL UTILISÉ POUR LA PRÉPARATION DE CET ARTICLE :
LATEX, avec le fichier de style article-hermes.cls,version 1.2 du 03/03/2005.
8. FORMULAIRE DE COPYRIGHT :
Retourner le formulaire de copyright signé par les auteurs, téléchargé sur :http://www.revuesonline.com
SERVICE ÉDITORIAL – HERMES-LAVOISIER14 rue de Provigny, F-94236 Cachan cedex
Tél : 01-47-40-67-67E-mail : [email protected]
Serveur web : http://www.revuesonline.com