apport de stage
TRANSCRIPT
Tuteur entreprise : DORE Guy Professeur de la Faculté des Sciences et de Génie Université Laval Professeur encadrant : RICOTIER Damien Professeur agrégé Polytech Grenoble Stage effectué du 4 juin au 10 août 2012
Rapport de stage 4ème année
Détermination de données
structurales des chaussées

ANDRE Camille Rapport de stage 2012
2
Remerciements
Je tiens à remercier M. Guy Doré, professeur titulaire au département de Génie Civil de l’université Laval, qui m’a accueillie dans son équipe de recherche pour que j’y réalise mon stage de 4ème année d’école d’ingénieur. Je souhaite tout particulièrement remercier M. Jean-Pascal BILODEAU pour ses conseils, son assistance et sa disponibilité, ainsi que toute l’équipe de professionnels de recherche et d’étudiants qui m’ont chaleureusement accueillie au sein de l’université pendant mon séjour. Je remercie l’ensemble des partenaires de la chaire de recherche industrielle, sans qui les projets menés aujourd’hui n’auraient pas vu le jour. Enfin, je remercie M. RICOTIER, tuteur Polytech, pour m’avoir guidée dans le choix de mon stage.
ANDRE Camille Rapport de stage 2012
3
Sommaire Introduction ............................................................................................................................................. 5
I. Cadre du stage ................................................................................................................................. 6
1. Le Canada et le Québec ............................................................................................................... 6
2. L’université Laval ......................................................................................................................... 7
3. Le laboratoire de géotechnique routière .................................................................................... 8
a. Présentation ............................................................................................................................ 8
b. Moyens techniques ............................................................................................................... 10
c. Moyens financiers ................................................................................................................. 12
4. La chaire i3c ............................................................................................................................... 12
a. Les objectifs ........................................................................................................................... 12
b. Les acteurs et leur rôle .......................................................................................................... 13
II. La mesure de déflexion de chaussées ........................................................................................... 15
1. La déflexion ............................................................................................................................... 15
2. Deux appareils incontournables ................................................................................................ 15
a. Le déflectomètre Lacroix en France ...................................................................................... 15
b. Le déflectomètre à masse tombante (FWD) au Québec ....................................................... 17
3. Comparaison du déflectographe Lacroix avec le FWD .............................................................. 18
4. Evaluation de la capacité portante d’une chaussée .................................................................. 20
5. Analyse des bassins de déflexion obtenus avec un FWD .......................................................... 20
a. But de l’analyse ..................................................................................................................... 20
b. Ligne d’influence ................................................................................................................... 20
c. Les paramètres et les unités utilisés ..................................................................................... 21
III. Création de la base de données ................................................................................................ 23
1. Choix des paramètres à faire varier .......................................................................................... 23
2. Modélisation d’une chaussée type par éléments finis .............................................................. 24
a. Différentes caractéristiques du modèle ................................................................................ 24
b. Variation des paramètres et résultats ................................................................................... 25
3. Analyse de la base de données obtenue ................................................................................... 25
a. Observation de la base de données ...................................................................................... 26
b. Type d’évolution des paramètres .......................................................................................... 27
c. Recherche d’une formule cohérente par analyse statistique ............................................... 29
ANDRE Camille Rapport de stage 2012
4
4. Validation et calibration de la formule avec des essais effectué sur le terrain ........................ 33
a. Instrumentation des sites du SERUL et de Saint-Célestin ..................................................... 33
b. Le déflectomètre multi-niveau (DMN) .................................................................................. 35
c. Les essais FWD ....................................................................................................................... 36
d. Résultats ................................................................................................................................ 36
IV. Comparaison des données obtenues par éléments finis avec des données obtenues par calcul
analytique .............................................................................................................................................. 38
V. Vers un dépouillement simple des bassins de déflexion .............................................................. 40
VI. Discussion et limite de validité .................................................................................................. 43
1. Le modèle .................................................................................................................................. 43
2. Légitimité de l’utilisation de SIS amélioré ................................................................................. 44
VII. Une expérience humaine .......................................................................................................... 45
1. L’insertion dans l’équipe ........................................................................................................... 45
2. La découverte de logiciels ......................................................................................................... 45
3. Les méthodes de travail ............................................................................................................ 45
Conclusion ............................................................................................................................................. 46
Table des illustrations ............................................................................................................................ 47
Liste des symboles et abréviations ........................................................................................................ 48
Liste des logiciels utilisés ....................................................................................................................... 48
Références ............................................................................................................................................. 49
ANDRE Camille Rapport de stage 2012
5
Introduction
Les routes sont indispensables pour permettre le développement d’une région ou d’un pays.
Certains facteurs extérieurs leur infligent pourtant des dégâts plus ou moins conséquents,
notamment le climat et les charges lourdes répétées dues au trafic. Cependant, les routes
doivent rester avant tout sûres et procurer une conduite confortable à l’usager.
Une chaussée se compose de plusieurs couches :
- Une couche de béton bitumineux ou enrobé bitumineux ;
- Une couche de fondation ;
- Une couche de sous-fondation.
Sous cette dernière couche se trouve le sol d’infrastructure.
Lorsqu’un véhicule circule sur une chaussée, celui-ci induit des déplacements verticaux
ponctuels sur les couches de la chaussée. C’est ce que l’on va appeler par la suite déflexion de la
chaussée. On peut caractériser la déflexion d’une chaussée à un instant donné par un bassin de
déflexion qui représente l’évolution des déplacements verticaux en fonction de la distance aux
roues du véhicule.
La connaissance des déformations dans les chaussées constitue un bon indicateur de l’état de
celles-ci. Mon stage a eu principalement pour but d’étudier les déformations verticales dues aux
charges lourdes sur les chaussées, au toit du sol d’infrastructure. Cette étude a été réalisée avec
le concours de l’équipe de recherche de la chaire de recherche industrielle i3c, à l’université
Laval, pendant 10 semaines.
Ce rapport va dans un premier temps présenter le cadre du stage. Ensuite, viendront quelques
bases pour la mesure de la déflexion sur les chaussées, puis la création d’un modèle de
prédiction des déformations verticales et sa validation. La partie suivante sera consacrée à la
comparaison des résultats avec ceux d’un autre logiciel. Ensuite sera présentée une page de
calcul crée pour synthétiser des paramètres de chaussée et de bassin de déflexion importants. La
partie suivante exposera les limites de validité et les interrogations restantes à propos de ce
modèle. Enfin viendra une synthèse de mes impressions pendant ce stage.
ANDRE Camille Rapport de stage 2012
6
I. Cadre du stage
1. Le Canada et le Québec
Le Canada est un pays d’Amérique du Nord qui partage ses frontières avec les Etats-Unis. Découvert il y a presque 500 ans, ce pays est une monarchie constitutionnelle bilingue (française et anglaise) de part ses origines. Pays développé, le Canada tire ses richesses de nombreuses ressources naturelles et du commerce avec les Etats-Unis. Le Canada compte près de 34 millions d’habitants, soit environ la moitié de la population française, pour une superficie de 10 millions de km2 alors que celle de la France est seulement de 675 000 km2. Le Canada est composé de 10 provinces: La Colombie-Britannique, l’Alberta, le Saskatchewan, le Manitoba, l’Ontario, le Nouveau Brunswick, l’Ile du Prince Edouard, la Nouvelle Ecosse et Terre Neuve-Labrador et enfin le Québec. La province de Québec compte 7.8 millions d’habitants, pour une superficie égale à trois fois celle de la France.
La ville de Québec, située au bord du fleuve Saint-Laurent, est la capitale provinciale du Québec. Elle est le lieu où siège le Parlement du Québec. La ville compte environ 500 000 habitants.
Figure 1: Le Canada et ses provinces
Figure 2: Le Québec
ANDRE Camille Rapport de stage 2012
7
2. L’université Laval
L’université de Laval est implantée à Québec, à l’ouest de la ville. Elle fut la première université francophone au Québec et accueille aujourd’hui près de 44 000 étudiants dans 400 programmes d’études. Elle est classée parmi les dix plus grandes universités de recherche au Canada et a un budget annuel global de l’ordre de 700 millions de dollars. C’est également une université tournée vers le développement durable. Pour avoir l’équivalent d’un diplôme d’ingénieur français, les élèves doivent suivre un programme de baccalauréat, d’une durée de 4 ans. Les matières sont au choix, l’élève peut poursuivre par la suite avec une maîtrise et un doctorat.
Figure 3: Le campus universitaire
ANDRE Camille Rapport de stage 2012
8
3. Le laboratoire de géotechnique routière
a. Présentation
Le laboratoire de géotechnique routière est une unité de l’université Laval et dépend du département Génie Civil.
Quelques chiffres
L’université Laval accueille près de 1300 chercheurs et développe actuellement une centaine de chaires de recherche. Le laboratoire de Géotechnique Routière est composé d’une équipe de 3 professionnels de recherche ainsi qu’une dizaine d’étudiants en maitrise, baccalauréat ou des stagiaires. Son budget est de 600 000 dollars canadiens (soit 390 000 euros), dont 500 000 dollars canadiens pour la chaire de recherche.
L’équipe
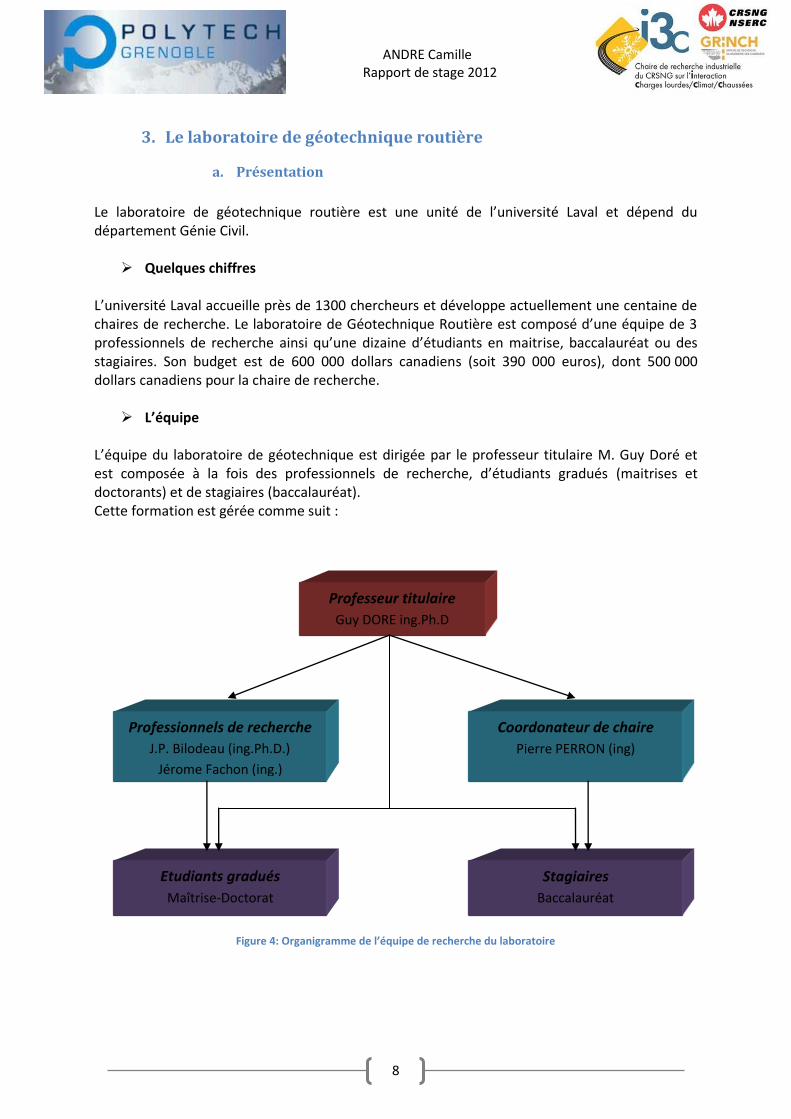
L’équipe du laboratoire de géotechnique est dirigée par le professeur titulaire M. Guy Doré et est composée à la fois des professionnels de recherche, d’étudiants gradués (maitrises et doctorants) et de stagiaires (baccalauréat). Cette formation est gérée comme suit :
Figure 4: Organigramme de l’équipe de recherche du laboratoire
Professeur titulaire
Guy DORE ing.Ph.D
Coordonateur de chaire
Pierre PERRON (ing)
Professionnels de recherche
J.P. Bilodeau (ing.Ph.D.)
Jérome Fachon (ing.)
Etudiants gradués
Maîtrise-Doctorat
Stagiaires
Baccalauréat
ANDRE Camille Rapport de stage 2012
9
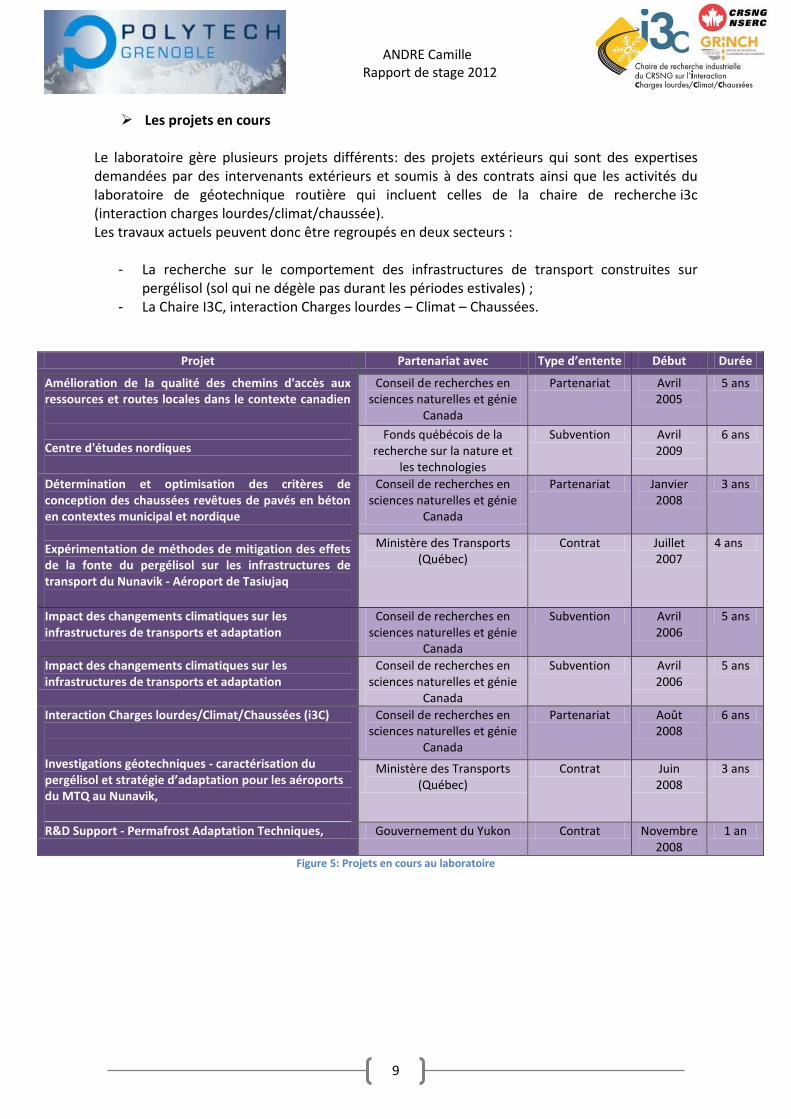
Les projets en cours
Le laboratoire gère plusieurs projets différents: des projets extérieurs qui sont des expertises demandées par des intervenants extérieurs et soumis à des contrats ainsi que les activités du laboratoire de géotechnique routière qui incluent celles de la chaire de recherche i3c (interaction charges lourdes/climat/chaussée). Les travaux actuels peuvent donc être regroupés en deux secteurs :
- La recherche sur le comportement des infrastructures de transport construites sur pergélisol (sol qui ne dégèle pas durant les périodes estivales) ;
- La Chaire I3C, interaction Charges lourdes – Climat – Chaussées.
Projet Partenariat avec Type d’entente Début Durée
Amélioration de la qualité des chemins d'accès aux ressources et routes locales dans le contexte canadien Centre d'études nordiques
Conseil de recherches en sciences naturelles et génie
Canada
Partenariat Avril 2005
5 ans
Fonds québécois de la recherche sur la nature et
les technologies
Subvention Avril 2009
6 ans
Détermination et optimisation des critères de conception des chaussées revêtues de pavés en béton en contextes municipal et nordique Expérimentation de méthodes de mitigation des effets de la fonte du pergélisol sur les infrastructures de transport du Nunavik - Aéroport de Tasiujaq
Conseil de recherches en sciences naturelles et génie
Canada
Partenariat Janvier 2008
3 ans
Ministère des Transports (Québec)
Contrat Juillet 2007
4 ans
Impact des changements climatiques sur les infrastructures de transports et adaptation
Conseil de recherches en sciences naturelles et génie
Canada
Subvention Avril 2006
5 ans
Impact des changements climatiques sur les infrastructures de transports et adaptation
Conseil de recherches en sciences naturelles et génie
Canada
Subvention Avril 2006
5 ans
Interaction Charges lourdes/Climat/Chaussées (i3C) Investigations géotechniques - caractérisation du pergélisol et stratégie d’adaptation pour les aéroports du MTQ au Nunavik,
Conseil de recherches en sciences naturelles et génie
Canada
Partenariat Août 2008
6 ans
Ministère des Transports (Québec)
Contrat Juin 2008
3 ans
R&D Support - Permafrost Adaptation Techniques, Gouvernement du Yukon Contrat Novembre 2008
1 an
Figure 5: Projets en cours au laboratoire
ANDRE Camille Rapport de stage 2012
10
Le GRINCH
Le laboratoire de géotechnique fait également partie du GRINCH (Groupe Interuniversitaire
d’ingénierie des Chaussée). Il s’agit d’un partenariat créé entre deux laboratoires : le laboratoire
de géotechnique routière de l’université de Laval et le laboratoire sur les chaussées, routes et
enrobés bitumineux de l’Ecole Technique Supérieur (ETS) de Montréal. Le but de cette
collaboration est de combiner les spécialités des deux laboratoires en échangeant les résultats
obtenus pour que la recherche faite dans un des domaines profite aussi à l’autre. Ainsi, un
colloque est organisé chaque année par un des deux laboratoires pour faire un point sur
l’avancée des projets de recherche de chaque laboratoire.
b. Moyens techniques
L’université Laval offre de nombreux supports techniques à ses différents départements. Le pôle génie civil, et plus particulièrement géotechnique, bénéficie de salles pour les professeurs et les étudiants, de salles informatiques ainsi qu’un laboratoire pour les expériences. Le laboratoire possède plusieurs instruments permettant de réaliser divers tests.
Les équipements du laboratoire
Les équipements du laboratoire comprennent :
- Presse hydraulique
- Presse CBR
- Chambres environnementales
- Cellule de gel et cellule de consolidation
- Cellule triaxiale
- Outils de détermination : granulométrie, micro-Deval, Los Angeles, sédimentométrie, compactage (proctor, table vibrante), oedomètre
- Bain thermique
- Conductivité hydraulique (paroi rigide et flexible)
Le simulateur routier de sollicitations mécaniques et climatiques de laboratoire
(SIMUL) Le laboratoire a acquis un simulateur routier qui permet de simuler le passage d’un véhicule. Ce simulateur est une roue qui peut se déplacer sur une petite chaussée créée artificiellement et dont on peut contrôler à la fois diverses conditions d’utilisation et la vitesse.
ANDRE Camille Rapport de stage 2012
11
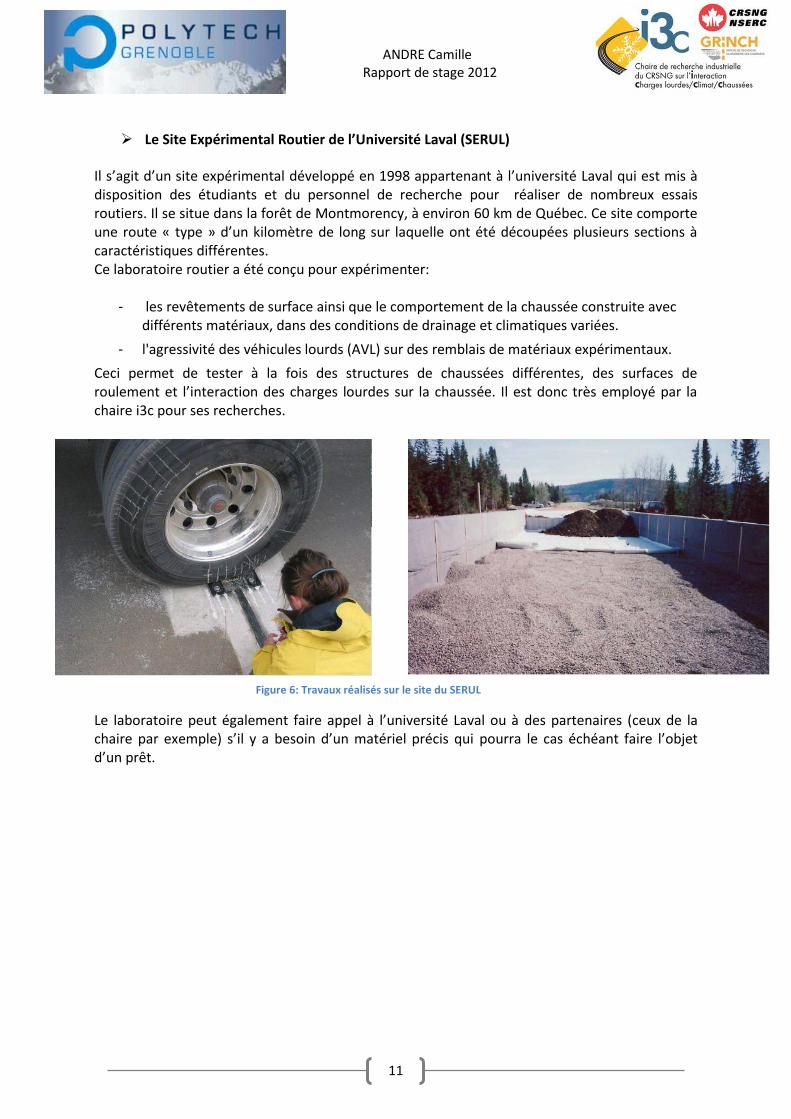
Le Site Expérimental Routier de l’Université Laval (SERUL)
Il s’agit d’un site expérimental développé en 1998 appartenant à l’université Laval qui est mis à disposition des étudiants et du personnel de recherche pour réaliser de nombreux essais routiers. Il se situe dans la forêt de Montmorency, à environ 60 km de Québec. Ce site comporte une route « type » d’un kilomètre de long sur laquelle ont été découpées plusieurs sections à caractéristiques différentes. Ce laboratoire routier a été conçu pour expérimenter:
- les revêtements de surface ainsi que le comportement de la chaussée construite avec différents matériaux, dans des conditions de drainage et climatiques variées.
- l'agressivité des véhicules lourds (AVL) sur des remblais de matériaux expérimentaux.
Ceci permet de tester à la fois des structures de chaussées différentes, des surfaces de roulement et l’interaction des charges lourdes sur la chaussée. Il est donc très employé par la chaire i3c pour ses recherches.
Le laboratoire peut également faire appel à l’université Laval ou à des partenaires (ceux de la chaire par exemple) s’il y a besoin d’un matériel précis qui pourra le cas échéant faire l’objet d’un prêt.
Figure 6: Travaux réalisés sur le site du SERUL
ANDRE Camille Rapport de stage 2012
12
c. Moyens financiers
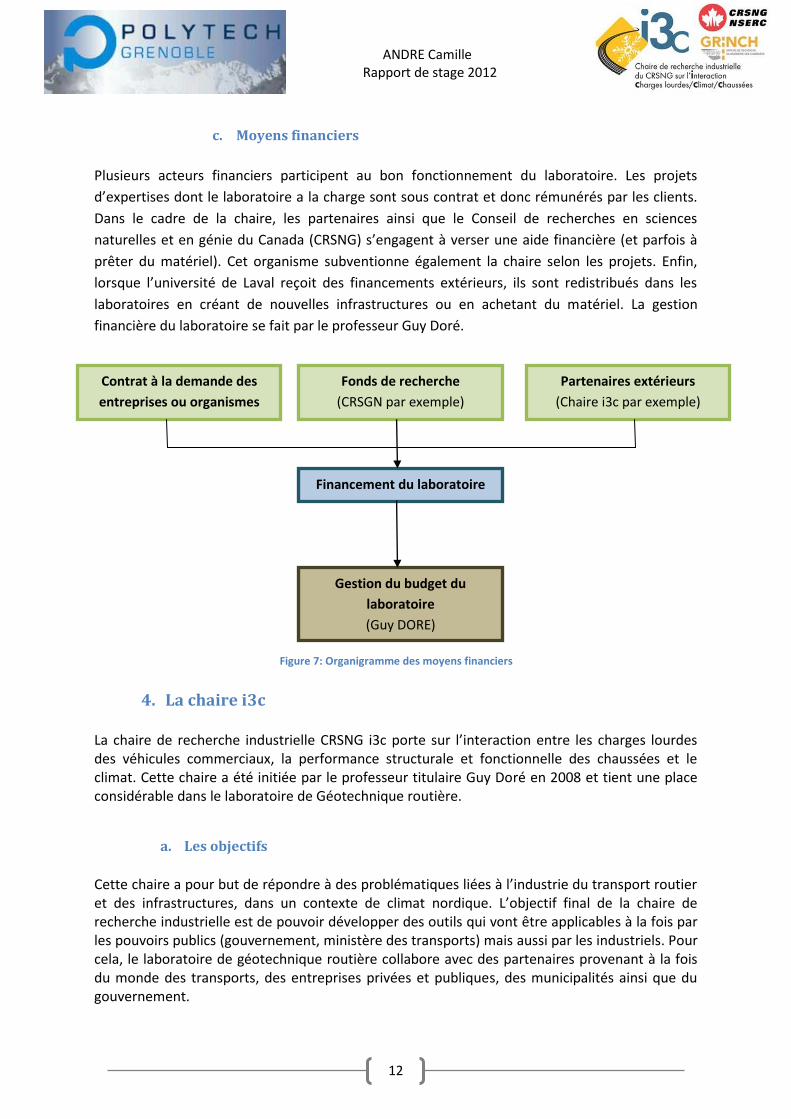
Plusieurs acteurs financiers participent au bon fonctionnement du laboratoire. Les projets
d’expertises dont le laboratoire a la charge sont sous contrat et donc rémunérés par les clients.
Dans le cadre de la chaire, les partenaires ainsi que le Conseil de recherches en sciences
naturelles et en génie du Canada (CRSNG) s’engagent à verser une aide financière (et parfois à
prêter du matériel). Cet organisme subventionne également la chaire selon les projets. Enfin,
lorsque l’université de Laval reçoit des financements extérieurs, ils sont redistribués dans les
laboratoires en créant de nouvelles infrastructures ou en achetant du matériel. La gestion
financière du laboratoire se fait par le professeur Guy Doré.
4. La chaire i3c
La chaire de recherche industrielle CRSNG i3c porte sur l’interaction entre les charges lourdes des véhicules commerciaux, la performance structurale et fonctionnelle des chaussées et le climat. Cette chaire a été initiée par le professeur titulaire Guy Doré en 2008 et tient une place considérable dans le laboratoire de Géotechnique routière.
a. Les objectifs
Cette chaire a pour but de répondre à des problématiques liées à l’industrie du transport routier et des infrastructures, dans un contexte de climat nordique. L’objectif final de la chaire de recherche industrielle est de pouvoir développer des outils qui vont être applicables à la fois par les pouvoirs publics (gouvernement, ministère des transports) mais aussi par les industriels. Pour cela, le laboratoire de géotechnique routière collabore avec des partenaires provenant à la fois du monde des transports, des entreprises privées et publiques, des municipalités ainsi que du gouvernement.
Contrat à la demande des
entreprises ou organismes
Fonds de recherche
(CRSGN par exemple)
Partenaires extérieurs
(Chaire i3c par exemple)
Financement du laboratoire
Gestion du budget du
laboratoire
(Guy DORE)
Figure 7: Organigramme des moyens financiers
ANDRE Camille Rapport de stage 2012
13
La chaire i3c a trois objectifs clés :
- Développer des connaissances sur l’interaction entre les charges lourdes, le climat et les chaussées ;
- Développer des technologies de pointes et des solutions concrètes aux problèmes que rencontrent actuellement les différentes entreprises du transport et les municipalités ;
- Développer des compétences pour améliorer les performances des chaussées.
Ainsi, la chaire i3c développe des techniques dont le but est de réduire l’endommagement des
chaussées résultant de l'action combinée des charges lourdes et du climat. Les industries du
transport voient dans ces projets de recherche l’opportunité d’améliorer leurs performances et
la qualité des infrastructures routières.
b. Les acteurs et leur rôle
La chaire i3c regroupe à la fois des professionnels de recherche de l’université Laval et des
partenaires industriels ou gouvernementaux.
Le laboratoire de géotechnique routière de l’université de Laval L’équipe du laboratoire de géotechnique routière a plusieurs missions dans la chaire i3c. Son rôle
principal est d’effectuer les recherches, d’analyser les données et de trouver des solutions aux
problèmes posés. L’équipe a aussi pour mission de s’attacher aux demandes des partenaires. En
effet, certains projets nécessitent d’être modifiés selon les besoins et les attentes des différents
intervenants.
La chaire de recherche industrielle a pour objectif la mise aux points de solutions concrètes, ainsi
l’équipe de recherche doit sans cesse avoir à l’esprit la bonne réalisation de ses projets.
L’équipe est composée de deux professionnels de recherche et d’un coordonnateur de
recherche :
- Jean-Pascal Bilodeau : documentation et planification des recherches, analyse des
données et supervision des étudiants.
- Jérôme Fachon : organisation, gestion et planification des projets, liaison technique
avec les partenaires
- Pierre Perron : communication avec les partenaires, gestion technique et financière de
la chaire, coordination entre les divers intervenants.
ANDRE Camille Rapport de stage 2012
14
Trois étudiants gradués, en maîtrise à l’université Laval, font également partie de la chaire i3c. Ils
effectuent leurs projets de master sur des projets de la chaire. Ils sont assistés par les
professionnels de recherche dans leurs démarches.
Lors des réunions avec les partenaires, le personnel de la chaire propose un bilan des travaux en
cours et recentre ses plannings et ses objectifs selon les avis et les besoins des partenaires
concernés.
Conseil de recherches en sciences naturelles et en génie du Canada (CRSNG) Le Conseil de Recherches en Sciences Naturelles et en Génie du Canada (CRSNG) a créé un
programme qui vise à développer des chaires liant l’industrie et la recherche. Pour créer une
chaire CRSNG, il faut développer des thèmes de recherche puis obtenir l’aval de plusieurs
partenaires liés au monde de l’industrie. Le CRSNG évalue ensuite le projet et donne son accord
pour que la chaire devienne une chaire de recherche industrielle CRSNG. Lorsqu’une chaire
bénéficie de ce programme, le CRSNG s’engage à verser une contribution financière égale à celle
de l’ensemble des contributions des partenaires. Ainsi, le CRSNG finance 50% d’une chaire de
recherche industrielle CRSNG. L’avis favorable pour la chaire i3c de devenir une chaire de
recherche industrielle CRSNG a été un point clé pour celle-ci, qui a donc pu bénéficier de la
participation financière du CRSNG.
ANDRE Camille Rapport de stage 2012
15
II. La mesure de déflexion de chaussées
1. La déflexion
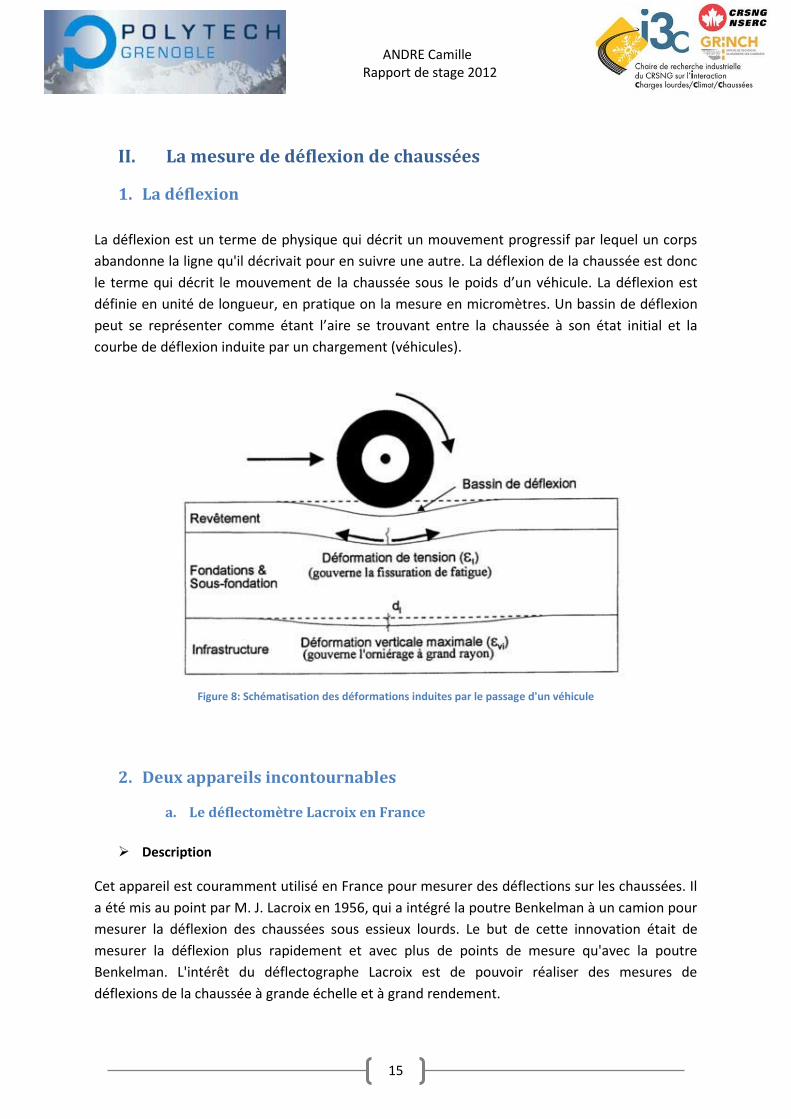
La déflexion est un terme de physique qui décrit un mouvement progressif par lequel un corps
abandonne la ligne qu'il décrivait pour en suivre une autre. La déflexion de la chaussée est donc
le terme qui décrit le mouvement de la chaussée sous le poids d’un véhicule. La déflexion est
définie en unité de longueur, en pratique on la mesure en micromètres. Un bassin de déflexion
peut se représenter comme étant l’aire se trouvant entre la chaussée à son état initial et la
courbe de déflexion induite par un chargement (véhicules).
2. Deux appareils incontournables
a. Le déflectomètre Lacroix en France
Description
Cet appareil est couramment utilisé en France pour mesurer des déflections sur les chaussées. Il
a été mis au point par M. J. Lacroix en 1956, qui a intégré la poutre Benkelman à un camion pour
mesurer la déflexion des chaussées sous essieux lourds. Le but de cette innovation était de
mesurer la déflexion plus rapidement et avec plus de points de mesure qu'avec la poutre
Benkelman. L'intérêt du déflectographe Lacroix est de pouvoir réaliser des mesures de
déflexions de la chaussée à grande échelle et à grand rendement.
Figure 8: Schématisation des déformations induites par le passage d'un véhicule
ANDRE Camille Rapport de stage 2012
16
Principe de mesure
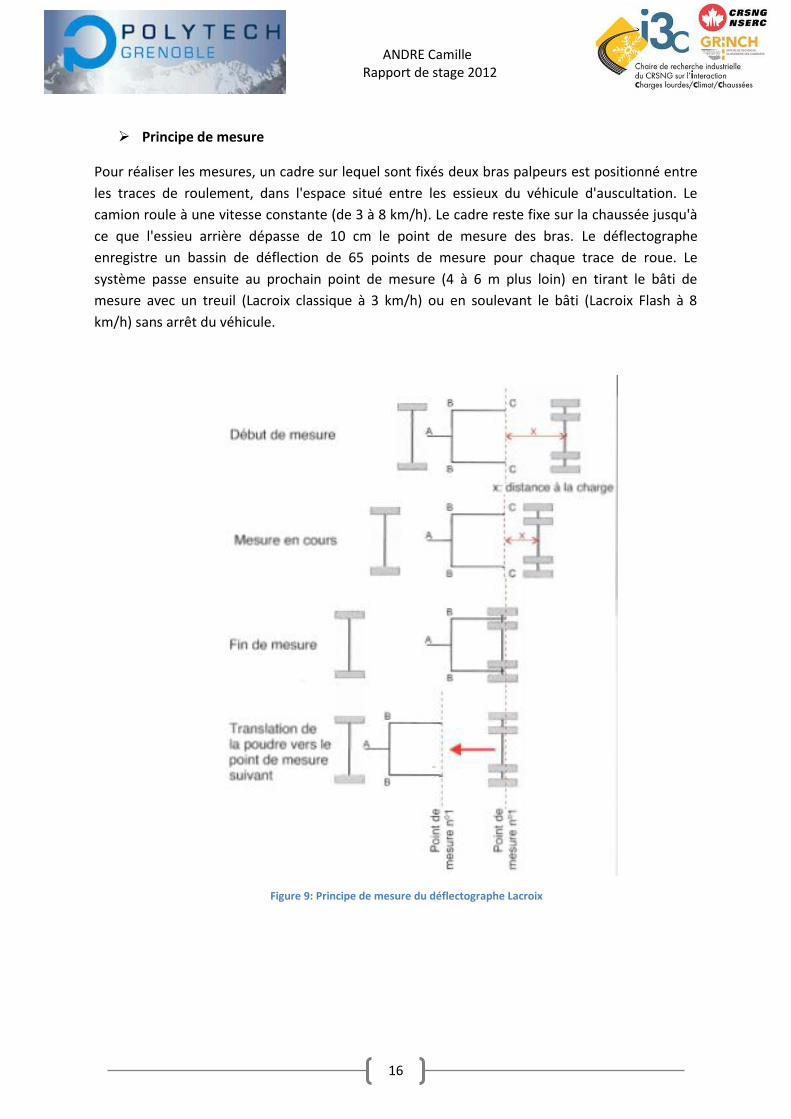
Pour réaliser les mesures, un cadre sur lequel sont fixés deux bras palpeurs est positionné entre
les traces de roulement, dans l'espace situé entre les essieux du véhicule d'auscultation. Le
camion roule à une vitesse constante (de 3 à 8 km/h). Le cadre reste fixe sur la chaussée jusqu'à
ce que l'essieu arrière dépasse de 10 cm le point de mesure des bras. Le déflectographe
enregistre un bassin de déflection de 65 points de mesure pour chaque trace de roue. Le
système passe ensuite au prochain point de mesure (4 à 6 m plus loin) en tirant le bâti de
mesure avec un treuil (Lacroix classique à 3 km/h) ou en soulevant le bâti (Lacroix Flash à 8
km/h) sans arrêt du véhicule.
Figure 9: Principe de mesure du déflectographe Lacroix

ANDRE Camille Rapport de stage 2012
17
b. Le déflectomètre à masse tombante (FWD) au Québec
Description
Le FWD est utilisé au Québec pour la mesure de
déflexion. Cet appareil est non destructif et a été
conçu pour simuler le passage d’un demi-essieu
de camion sur une chaussée. Le déflectomètre à
masse tombante mesure le bassin de déflexion
en surface provoqué par une masse tombante.
Le FWD est équipé de 9 à 15 géophones qui
mesurent le bassin de déflexions, d’un capteur
de force relevant la charge sous la plaque
frappée et de poids qui permettent, en
changeant la hauteur de chute, d'atteindre une
charge variant de 7 à 120 kN (FWD) ou de 30 à
240 kN (Heavy Weight Deflectometer). Il se compose également d'une remorque tractée de 850
kg environ transportant les éléments de mise en charge de la chaussée, les neuf géophones et
un système de pilotage automatique, d'acquisition et de traitement de l'information, embarqué
dans le véhicule tracteur. Le FWD est utilisable sur les chaussées souples, semi-rigides ou rigides.
Principe de mesure
Après la mise en station de la remorque au droit du point de mesure, la masse est libérée d'une hauteur pouvant varier de 2 à 40 cm provoquant une force variable de 7 à 120 kN. La hauteur de
chute et la force appliquée sont fixées en fonction de la nature de la structure testée. La transmission de la charge se fait par un
ressort dont la constante de raideur
permet de définir la durée du
chargement. Les 9 à 15 capteurs (dont un
est au centre de la plaque) enregistrent la
déformée longitudinale sur une longueur
de 2 mètres environ du point
d'application de la charge. Pour les
structures routières, les caractéristiques
de chargement sont réglées de manière à
obtenir une impulsion d'une durée de 28
ms, soit environ 34 Hz, correspondant à la
durée de charge d'un poids lourd circulant
à une vitesse moyenne d'environ 70 km/h.
Figure 10: Mesure de déflexions avec un FWD
Figure 11: Principe de mesure d'un FWD
ANDRE Camille Rapport de stage 2012
18
L'exploitation des résultats est facilitée par l'enregistrement de la pression de contact sous la
plaque, la durée d'application de la charge et les déflexions mesurées par les capteurs.
Lors de l'essai FWD, l'appareil mesure la charge appliquée et les déflexions par l’intermédiaire des différents géophones placés le long du profil (à 0, 200, 300, 450, 600, 750, 900, 1200 et 1500mm du centre de la plaque), et ce pour chaque lancer de la masse. L'acquisition s'effectue à pas de temps réguliers durant une période de 60 à 120 ms. Ensuite, à partir des historiques de déflexion, on ne retient que les déflexions maximales de chaque géophone, ce qui permet de reconstituer un bassin de déflexion « maximal ».
3. Comparaison du déflectographe Lacroix avec le FWD
Le choix d’utiliser un de ces appareils plutôt que l’autre dépend des besoins du gestionnaire
routier et des problèmes à résoudre. Voici un comparatif de différentes caractéristiques aidant à
faire un choix d’appareil judicieux.
Mode d'application de la charge : le déflectographe Lacroix applique une charge roulante à la structure de chaussée contrairement au FWD. Ce mode de chargement est plus conforme aux sollicitations du trafic en provoquant la rotation des contraintes principales dans le massif pouvant être schématisé comme un effet de «pétrissage» du matériau.
Vitesse d'application de la charge : la vitesse de sollicitation de la structure est très lente dans le cas du Lacroix. Compte tenu du comportement viscoélastique des matériaux bitumineux, leur rigidité apparente peut diminuer de 30 à 70% par rapport à la même structure sollicitée à une vitesse de trafic courante. Le FWD induit une impulsion de chargement plus courte à même de simuler une réaction des matériaux bitumineux équivalente à un chargement réel (vitesse de l'ordre de 70 km/h). La réaction des matériaux de surface étant moins rigide avec le Lacroix, les contraintes sont transmises avec un niveau plus élevé vers les couches les plus profondes. Cette particularité permet au Lacroix d'avoir un pouvoir discriminant plus important vis-à-vis des sols et couches de fondation. D'un autre côté, le FWD est plus fiable pour estimer les caractéristiques mécaniques des couches bitumineuses en surface.
Rendement et pas de mesure : le rendement de l'appareil est à l'avantage du Lacroix qui permet de relever la déflexion sur les deux traces de roue (gauche et droite) avec un ratio Vitesse / Intervalle de mesure plus élevé. Le FWD compense son rendement plus faible par une souplesse d'utilisation plus grande. Il est en effet possible de disposer l'appareil longitudinalement ou transversalement au niveau d'un point quelconque sur toute la surface de la voie. Le FWD peut rencontrer une certaine difficulté à réaliser des mesures sur la trace droite dans le cas d'une chaussée étroite, où la proximité de la banquette empêche la mise en station de la remorque.
ANDRE Camille Rapport de stage 2012
19
Résolution des capteurs de mesure : le déflectographe Lacroix sollicite la structure de telle sorte qu'il engendre une amplitude de déflexion plus grande et variant plus lentement que dans le cas du FWD. Ce mode de chargement s'accommode d'un capteur mesurant le déplacement au 1/100 de mm. Le FWD applique une impulsion brève conduisant à une déflexion faible et variant très vite. Cette caractéristique du chargement nécessite un capteur sismique (géophone) permettant une précision de mesure de 1/1000 de mm. Le FWD peut présenter un avantage dans le cas où l'on cherche à mesurer une légère variation dans le temps de la capacité portante d'une structure.
Niveau de chargement appliqué et type de surfaces auscultées : le FWD offre la possibilité de faire varier l'intensité de la charge appliquée en fonction de la rigidité de structure observée. Le déflectographe Lacroix dispose d'une charge unique choisie au début de l'auscultation par un lestage du camion à 10 ou 13 t sur l'essieu de mesure. Les dimensions et le poids du camion Lacroix peuvent le pénaliser sur certaines routes (virages serrés, forte pente, passages à niveau) alors que le FWD y sera plus à l'aise. Ce dernier permet de réaliser des mesures sur tout type de surfaces allant des matériaux granulaires en fondation aux couches de surface bitumineuses ou cimentaires. De plus, avec le FWD, il est possible de déterminer l'état des joints d'un revêtement en béton. De par sa charge potentiellement très élevée (FWD jusqu'à 24 t et HWD jusqu'à 48 t), le FWD/HWD permet également d'effectuer des mesures de portance sur des pistes aéroportuaires.
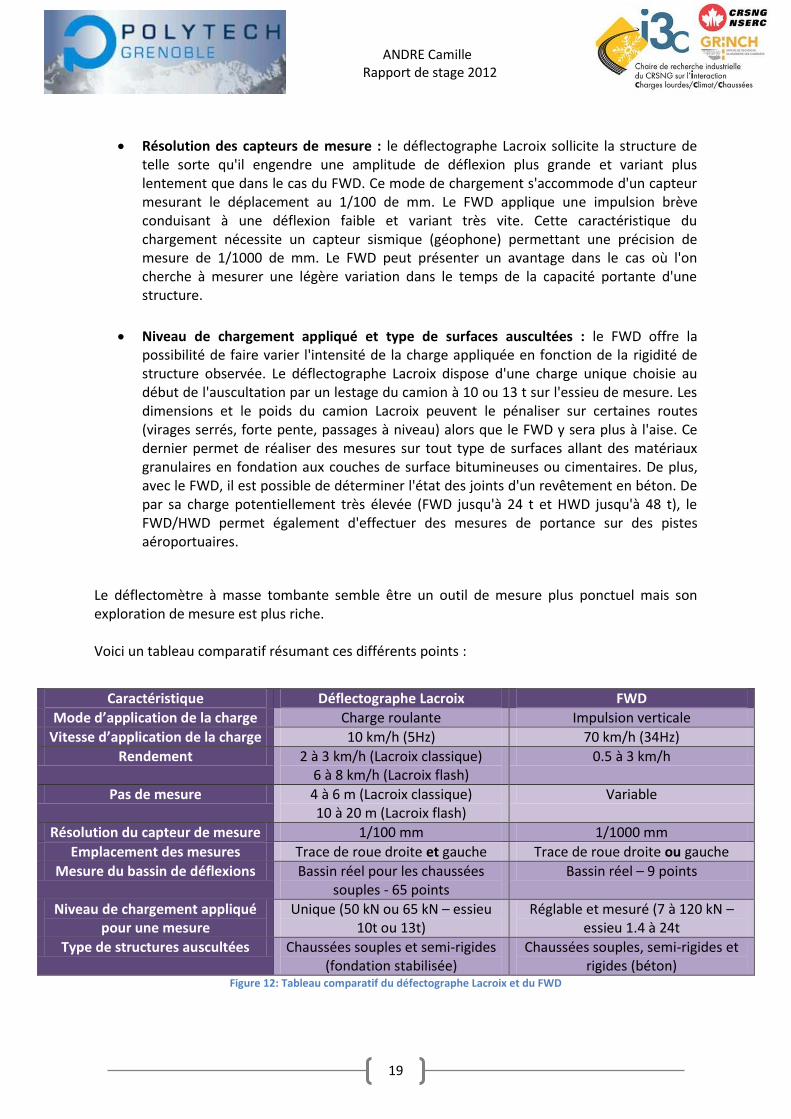
Le déflectomètre à masse tombante semble être un outil de mesure plus ponctuel mais son exploration de mesure est plus riche. Voici un tableau comparatif résumant ces différents points :
Caractéristique Déflectographe Lacroix FWD
Mode d’application de la charge Charge roulante Impulsion verticale
Vitesse d’application de la charge 10 km/h (5Hz) 70 km/h (34Hz)
Rendement 2 à 3 km/h (Lacroix classique) 6 à 8 km/h (Lacroix flash)
0.5 à 3 km/h
Pas de mesure 4 à 6 m (Lacroix classique) 10 à 20 m (Lacroix flash)
Variable
Résolution du capteur de mesure 1/100 mm 1/1000 mm
Emplacement des mesures Trace de roue droite et gauche Trace de roue droite ou gauche
Mesure du bassin de déflexions Bassin réel pour les chaussées souples - 65 points
Bassin réel – 9 points
Niveau de chargement appliqué pour une mesure
Unique (50 kN ou 65 kN – essieu 10t ou 13t)
Réglable et mesuré (7 à 120 kN – essieu 1.4 à 24t
Type de structures auscultées Chaussées souples et semi-rigides (fondation stabilisée)
Chaussées souples, semi-rigides et rigides (béton)
Figure 12: Tableau comparatif du défectographe Lacroix et du FWD
ANDRE Camille Rapport de stage 2012
20
4. Evaluation de la capacité portante d’une chaussée
Les mesures de déflexion fournies par le Lacroix et le FWD servent à une évaluer la capacité portante de la structure auscultée. Différentes approches permettent une exploitation plus ou moins poussée des résultats. Les voici par degré de précision :
- Calcul de la déflection déterminante d'un tronçon homogène ;
- Calcul du module élastique apparent des couches ;
- Estimation de la durée de vie résiduelle de la structure ;
- Détermination de l'épaisseur de renforcement.
5. Analyse des bassins de déflexion obtenus avec un FWD
a. But de l’analyse
Actuellement, l'interprétation des mesures de déflexion se fait sous l’hypothèse que les conditions de chargement sont statiques. L’approche statique permet d’évaluer le comportement structural des chaussées. En effet, les déflexions maximales et les paramètres de déflexion qui caractérisent le bassin de déflexion permettent de déterminer les modules des différentes couches par rétrocalcul. Les notions et les outils utilisés pour interpréter les essais FWD incluent le concept de la ligne d'influence.
b. Ligne d’influence
Dans une chaussée à trois couches sur laquelle une charge statique est appliquée, le bassin de
déflexion qui en résulte est mesuré par des capteurs de déplacement (géophones). Connaissant
les propriétés mécaniques des couches des matériaux, il est possible de calculer la courbe de
déflexion correspondant à 95 % de la déflexion mesurée en surface. Elle décline graduellement
en profondeur au fur et à mesure que la distance radiale augmente depuis le point de
chargement (centre de la plaque circulaire). Notons que la forme et la position de cette courbe
dépendent du module et de l'épaisseur des couches de la chaussée. Néanmoins, on peut
affirmer que la déflexion mesurée en surface est attribuable, en majeure partie, à la
compression verticale des matériaux situés sous cette courbe. Seulement une faible portion (5
%) de cette déflexion survient dans les matériaux situés au-dessus de cette ligne. Par
conséquent, les matériaux situés au-dessus de cette courbe n'ont pratiquement pas d'influence
sur la déflexion mesurée en surface à une distance donnée. Ainsi, les déflexions mesurées par les
quatre derniers capteurs de déplacement sont essentiellement influencées par la compression
verticale de la couche de sol, les deux autres, plus près de la plaque circulaire, le sont par l'effet
combiné de la fondation et du sol, alors que celui au centre de la plaque reflète l'effet des trois
couches (revêtement, fondation et sol). Finalement, on peut assimiler la courbe de 95 % de la
déflexion mesurée en surface à une ligne ayant une pente de 34°, soit environ 2V/3H. Cette
droite, qui définit un cône dans l'espace, représente en quelque sorte la distribution des
contraintes verticales dans la chaussée dues à la charge appliquée sur la plaque en surface.
ANDRE Camille Rapport de stage 2012
21
c. Les paramètres et les unités utilisés
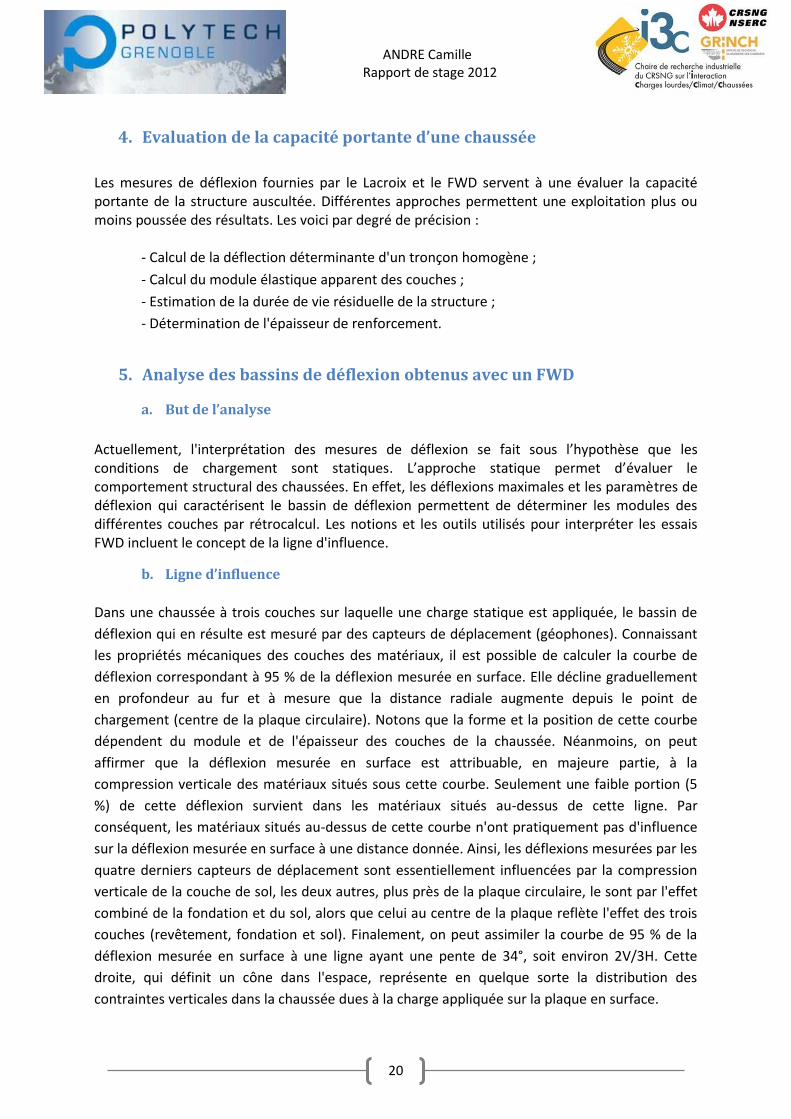
La déflexion maximale du bassin de déflexion D0 donne un ordre de grandeur de la qualité
structurale globale de la chaussée.
L'indice de courbure de surface
(SCI) est relié à la rigidité dans les
premiers 200 mm environ de la
chaussée, soit celle de l’enrobé ou
de l’enrobé combiné à la couche
de fondation lorsque l’enrobé est
mince. Un SCI élevé indique donc
des problèmes dans les couches de
surface.
L'indice de courbure de la base
(BCI) est relié à la couche de sous-
fondation et parfois d’infrastructure, entre 400 et 800 mm de profondeur. Un BCI élevé indique
donc des problèmes dans les couches profondes.
L'aire normalisée A du bassin fournit une assez bonne indication de la rigidité relative de la
structure de la chaussée, particulièrement pour les couches liées, indépendamment de la rigidité
du sol d’infrastructure.
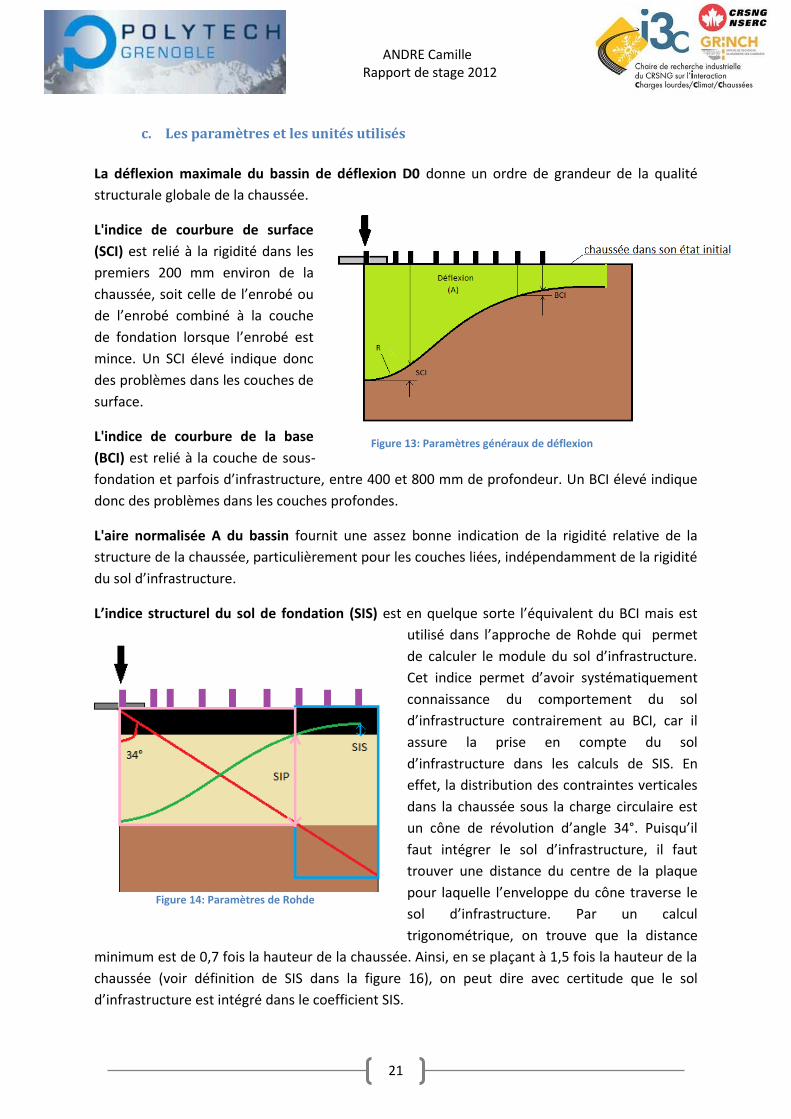
L’indice structurel du sol de fondation (SIS) est en quelque sorte l’équivalent du BCI mais est
utilisé dans l’approche de Rohde qui permet
de calculer le module du sol d’infrastructure.
Cet indice permet d’avoir systématiquement
connaissance du comportement du sol
d’infrastructure contrairement au BCI, car il
assure la prise en compte du sol
d’infrastructure dans les calculs de SIS. En
effet, la distribution des contraintes verticales
dans la chaussée sous la charge circulaire est
un cône de révolution d’angle 34°. Puisqu’il
faut intégrer le sol d’infrastructure, il faut
trouver une distance du centre de la plaque
pour laquelle l’enveloppe du cône traverse le
sol d’infrastructure. Par un calcul
trigonométrique, on trouve que la distance
minimum est de 0,7 fois la hauteur de la chaussée. Ainsi, en se plaçant à 1,5 fois la hauteur de la
chaussée (voir définition de SIS dans la figure 16), on peut dire avec certitude que le sol
d’infrastructure est intégré dans le coefficient SIS.
Figure 13: Paramètres généraux de déflexion
Figure 14: Paramètres de Rohde
ANDRE Camille Rapport de stage 2012
22
L’indice structurel de la chaussée (SIP) est également une sorte d’équivalent du SCI. Il donne des
informations sur la rigidité de la chaussée dans son ensemble (enrobé, fondation et sous-
fondation).
En général, plus les déflexions sont élevées, plus la chaussée est faible en épaisseur.
Typiquement, les déflexions mesurées aux géophones les plus éloignés du point d'application de
la charge reflètent le comportement des couches plus profondes alors que celles obtenues aux
géophones plus proches de la plaque représentent l'effet composé des couches de la chaussée.
Ce phénomène est expliqué par la distribution des contraintes verticales dans la chaussée sous la
plaque circulaire.
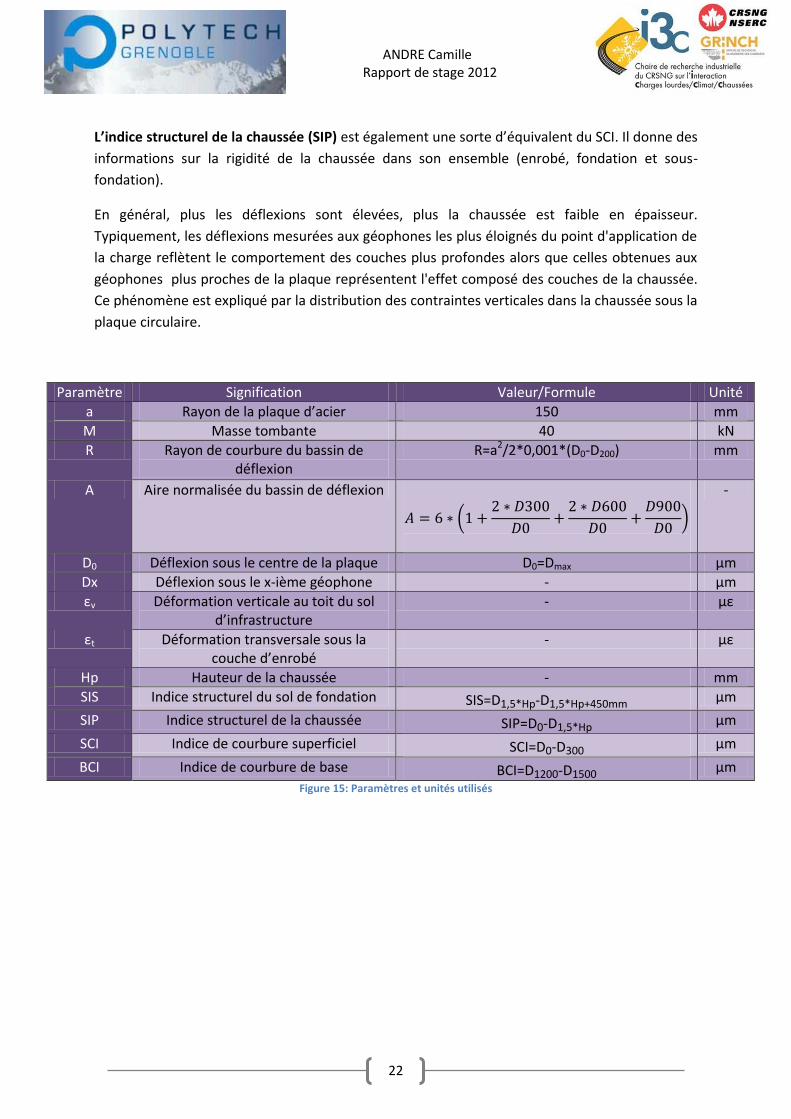
Paramètre Signification Valeur/Formule Unité
a Rayon de la plaque d’acier 150 mm
M Masse tombante 40 kN
R Rayon de courbure du bassin de déflexion
R=a2/2*0,001*(D0-D200) mm
A Aire normalisée du bassin de déflexion
-
D0 Déflexion sous le centre de la plaque D0=Dmax μm
Dx Déflexion sous le x-ième géophone - μm
εv Déformation verticale au toit du sol d’infrastructure
- με
εt Déformation transversale sous la couche d’enrobé
- με
Hp Hauteur de la chaussée - mm
SIS Indice structurel du sol de fondation SIS=D1,5*Hp-D1,5*Hp+450mm μm
SIP Indice structurel de la chaussée SIP=D0-D1,5*Hp μm
SCI Indice de courbure superficiel SCI=D0-D300 μm
BCI Indice de courbure de base BCI=D1200-D1500 μm
Figure 15: Paramètres et unités utilisés
ANDRE Camille Rapport de stage 2012
23
III. Création de la base de données
Pour mettre en évidence les paramètres les plus influents sur la valeur de déformation verticale
à l’interface sol de sous-fondation/sol d’infrastructure, il a fallu recueillir de nombreux bassins de
déflexion ainsi que les valeurs de déformations verticales de la chaussée à ce niveau, le tout en
faisant varier les paramètres connus de la chaussée, c’est-à-dire les hauteurs et les modules des
différentes couches. Toutes ces informations ont été obtenues à partir d’un modèle de chaussée
créé à l’aide d’un logiciel de simulation (Géostudio-Sigma) utilisant les éléments finis. Elles ont
ensuite été concentrées dans une base de données crée à cet effet.
1. Choix des paramètres à faire varier
Les paramètres classiques d’une chaussée sont les hauteurs et les modules de chacune des
couches. Ce sont donc parmi ceux-là qu’il faut trouver le ou les paramètres qui ont le plus de
poids dans la valeur de la déformation verticale. Pour connaître l’influence respective de tous
ces paramètres, il a été convenu de les faire varier successivement (hauteurs de couches variant
à modules de couches constants puis modules de couches variant à hauteurs de couches
constantes) et d’observer les valeurs de déformations verticales associées. Les valeurs
constantes de modules et de hauteurs choisies sont les valeurs moyennes les plus rencontrées,
soit les moyennes des valeurs minimales et maximales du tableau ci-dessous.
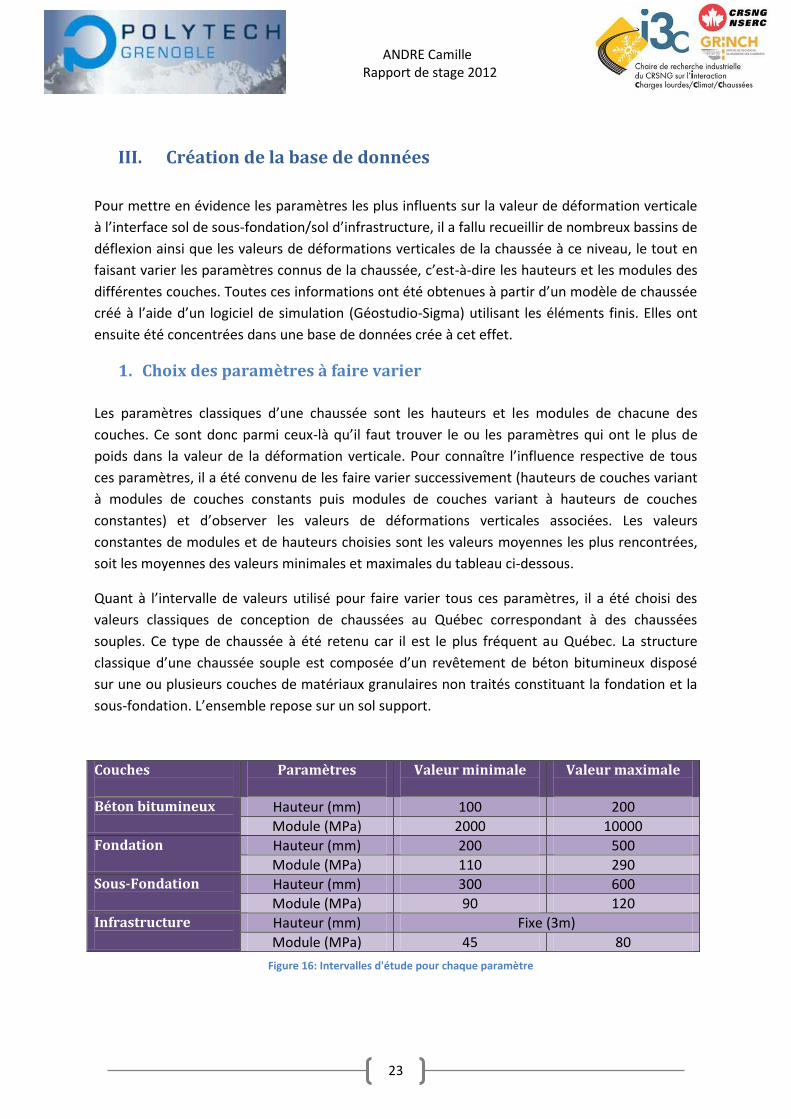
Quant à l’intervalle de valeurs utilisé pour faire varier tous ces paramètres, il a été choisi des
valeurs classiques de conception de chaussées au Québec correspondant à des chaussées
souples. Ce type de chaussée à été retenu car il est le plus fréquent au Québec. La structure
classique d’une chaussée souple est composée d’un revêtement de béton bitumineux disposé
sur une ou plusieurs couches de matériaux granulaires non traités constituant la fondation et la
sous-fondation. L’ensemble repose sur un sol support.
Couches
Paramètres
Valeur minimale
Valeur maximale
Béton bitumineux
Hauteur (mm) 100 200
Module (MPa) 2000 10000 Fondation
Hauteur (mm) 200 500
Module (MPa) 110 290 Sous-Fondation
Hauteur (mm) 300 600
Module (MPa) 90 120 Infrastructure
Hauteur (mm) Fixe (3m)
Module (MPa) 45 80
Figure 16: Intervalles d'étude pour chaque paramètre
ANDRE Camille Rapport de stage 2012
24
2. Modélisation d’une chaussée type par éléments finis
a. Différentes caractéristiques du modèle
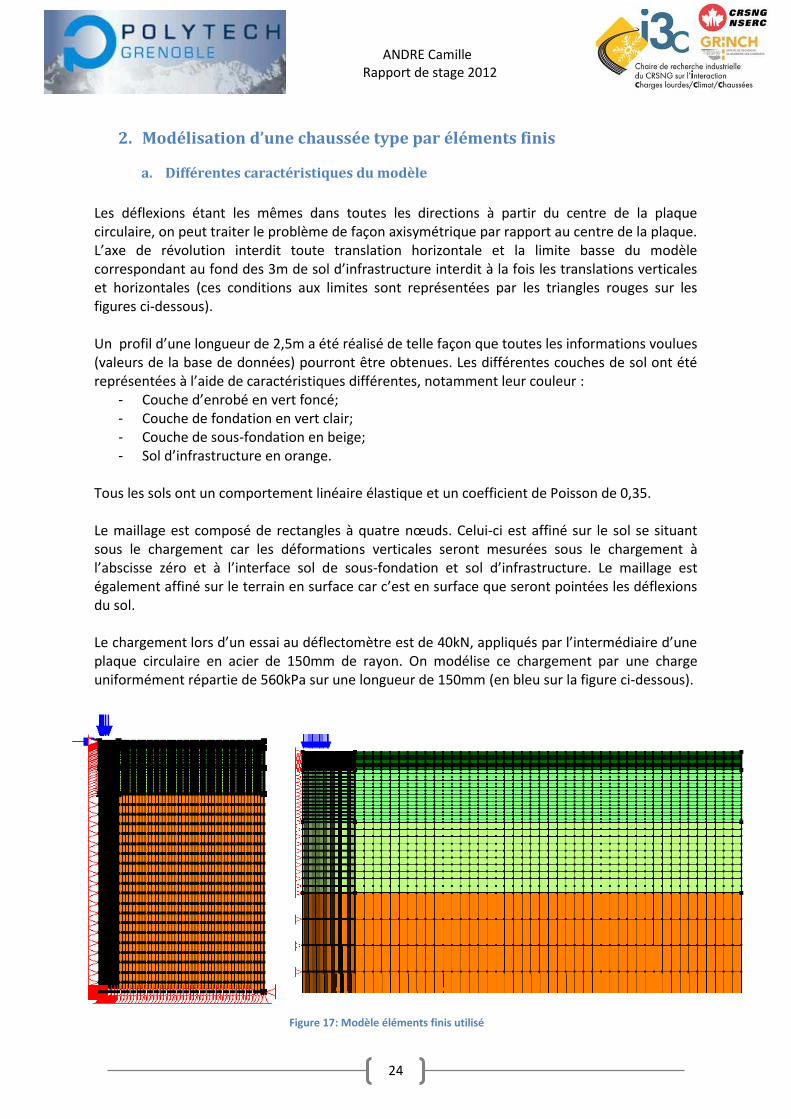
Les déflexions étant les mêmes dans toutes les directions à partir du centre de la plaque circulaire, on peut traiter le problème de façon axisymétrique par rapport au centre de la plaque. L’axe de révolution interdit toute translation horizontale et la limite basse du modèle correspondant au fond des 3m de sol d’infrastructure interdit à la fois les translations verticales et horizontales (ces conditions aux limites sont représentées par les triangles rouges sur les figures ci-dessous). Un profil d’une longueur de 2,5m a été réalisé de telle façon que toutes les informations voulues (valeurs de la base de données) pourront être obtenues. Les différentes couches de sol ont été représentées à l’aide de caractéristiques différentes, notamment leur couleur :
- Couche d’enrobé en vert foncé; - Couche de fondation en vert clair; - Couche de sous-fondation en beige; - Sol d’infrastructure en orange.
Tous les sols ont un comportement linéaire élastique et un coefficient de Poisson de 0,35. Le maillage est composé de rectangles à quatre nœuds. Celui-ci est affiné sur le sol se situant sous le chargement car les déformations verticales seront mesurées sous le chargement à l’abscisse zéro et à l’interface sol de sous-fondation et sol d’infrastructure. Le maillage est également affiné sur le terrain en surface car c’est en surface que seront pointées les déflexions du sol. Le chargement lors d’un essai au déflectomètre est de 40kN, appliqués par l’intermédiaire d’une plaque circulaire en acier de 150mm de rayon. On modélise ce chargement par une charge uniformément répartie de 560kPa sur une longueur de 150mm (en bleu sur la figure ci-dessous).
Figure 17: Modèle éléments finis utilisé
ANDRE Camille Rapport de stage 2012
25
b. Variation des paramètres et résultats
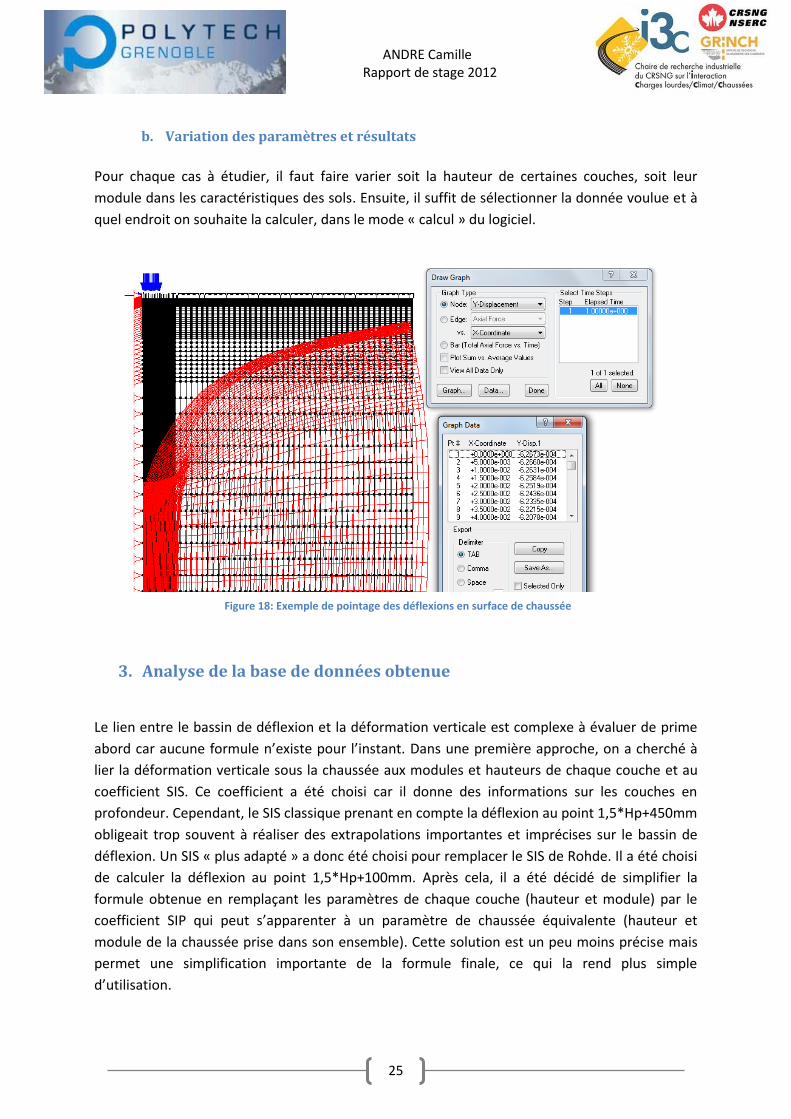
Pour chaque cas à étudier, il faut faire varier soit la hauteur de certaines couches, soit leur
module dans les caractéristiques des sols. Ensuite, il suffit de sélectionner la donnée voulue et à
quel endroit on souhaite la calculer, dans le mode « calcul » du logiciel.
3. Analyse de la base de données obtenue
Le lien entre le bassin de déflexion et la déformation verticale est complexe à évaluer de prime
abord car aucune formule n’existe pour l’instant. Dans une première approche, on a cherché à
lier la déformation verticale sous la chaussée aux modules et hauteurs de chaque couche et au
coefficient SIS. Ce coefficient a été choisi car il donne des informations sur les couches en
profondeur. Cependant, le SIS classique prenant en compte la déflexion au point 1,5*Hp+450mm
obligeait trop souvent à réaliser des extrapolations importantes et imprécises sur le bassin de
déflexion. Un SIS « plus adapté » a donc été choisi pour remplacer le SIS de Rohde. Il a été choisi
de calculer la déflexion au point 1,5*Hp+100mm. Après cela, il a été décidé de simplifier la
formule obtenue en remplaçant les paramètres de chaque couche (hauteur et module) par le
coefficient SIP qui peut s’apparenter à un paramètre de chaussée équivalente (hauteur et
module de la chaussée prise dans son ensemble). Cette solution est un peu moins précise mais
permet une simplification importante de la formule finale, ce qui la rend plus simple
d’utilisation.
Figure 18: Exemple de pointage des déflexions en surface de chaussée
ANDRE Camille Rapport de stage 2012
26
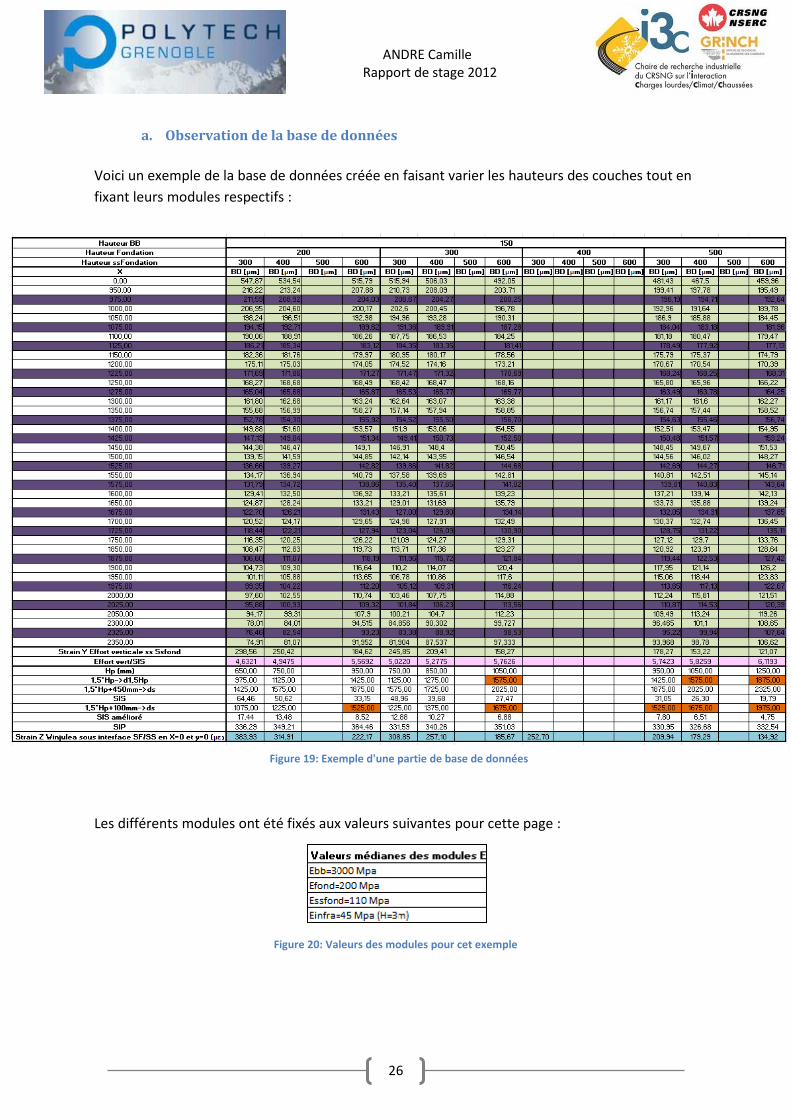
a. Observation de la base de données
Voici un exemple de la base de données créée en faisant varier les hauteurs des couches tout en
fixant leurs modules respectifs :
Les différents modules ont été fixés aux valeurs suivantes pour cette page :
Figure 20: Valeurs des modules pour cet exemple
Figure 19: Exemple d'une partie de base de données
ANDRE Camille Rapport de stage 2012
27
Voici le code couleur utilisé pour se repérer dans la base de données :
Figure 21: Code couleur de la base de données
Les autres variations se trouvent dans la base de données complète.
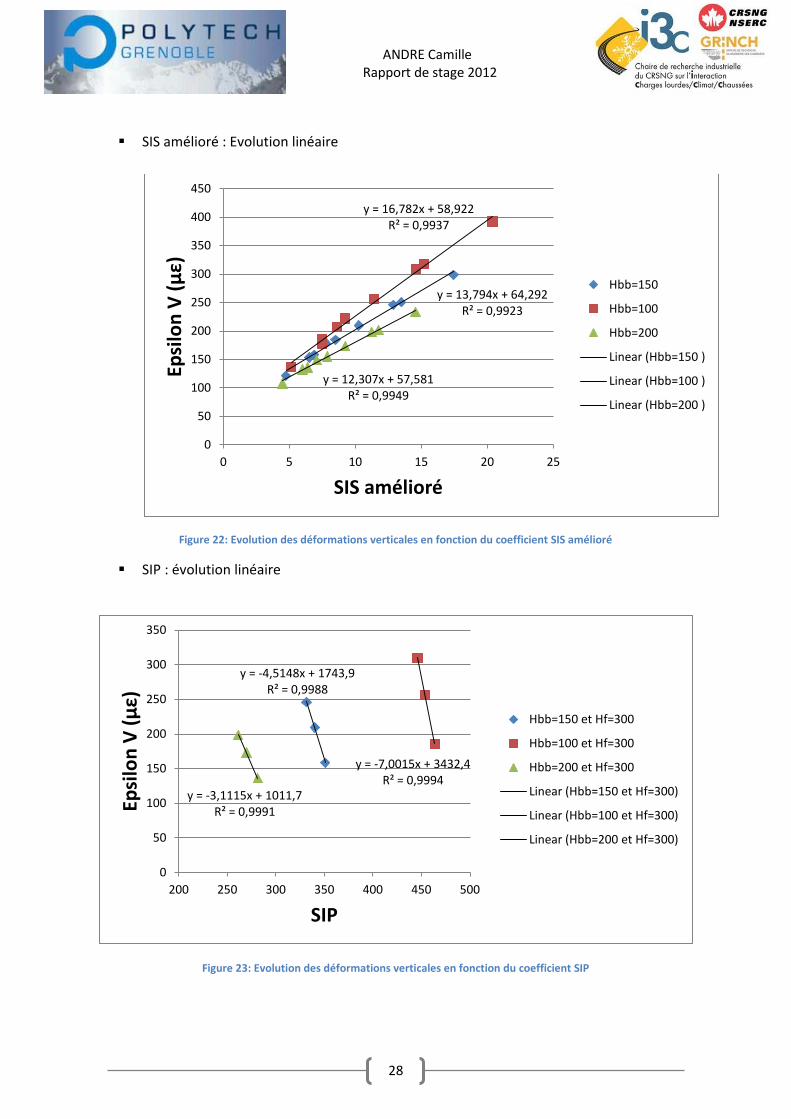
b. Type d’évolution des paramètres
Pour quantifier les premières observations, il a fallu tracer les graphiques d’évolution de la
déformation verticale en fonction de chacun des paramètres pris successivement. En ajoutant
une courbe de tendance, on peut connaître le type d’évolution (linéaire, logarithmique ou
exponentielle) de la déformation verticale en fonction de chaque paramètre. Cela va être un
guide pour trouver une formule décrivant de façon réaliste les évolutions des déformations
verticales. Différentes études ont été menées pour exprimer la déformation verticale sous la
chaussée avec différents paramètres :
(1)
(2)
(3)
La troisième façon d’exprimer εv a finalement été retenue.
ANDRE Camille Rapport de stage 2012
28
SIS amélioré : Evolution linéaire
Figure 22: Evolution des déformations verticales en fonction du coefficient SIS amélioré
SIP : évolution linéaire
Figure 23: Evolution des déformations verticales en fonction du coefficient SIP
y = 13,794x + 64,292 R² = 0,9923
y = 16,782x + 58,922 R² = 0,9937
y = 12,307x + 57,581 R² = 0,9949
0
50
100
150
200
250
300
350
400
450
0 5 10 15 20 25
Epsi
lon
V (
με)
SIS amélioré
Hbb=150
Hbb=100
Hbb=200
Linear (Hbb=150 )
Linear (Hbb=100 )
Linear (Hbb=200 )
y = -4,5148x + 1743,9 R² = 0,9988
y = -7,0015x + 3432,4 R² = 0,9994
y = -3,1115x + 1011,7 R² = 0,9991
0
50
100
150
200
250
300
350
200 250 300 350 400 450 500
Epsi
lon
V (
με)
SIP
Hbb=150 et Hf=300
Hbb=100 et Hf=300
Hbb=200 et Hf=300
Linear (Hbb=150 et Hf=300)
Linear (Hbb=100 et Hf=300)
Linear (Hbb=200 et Hf=300)
ANDRE Camille Rapport de stage 2012
29
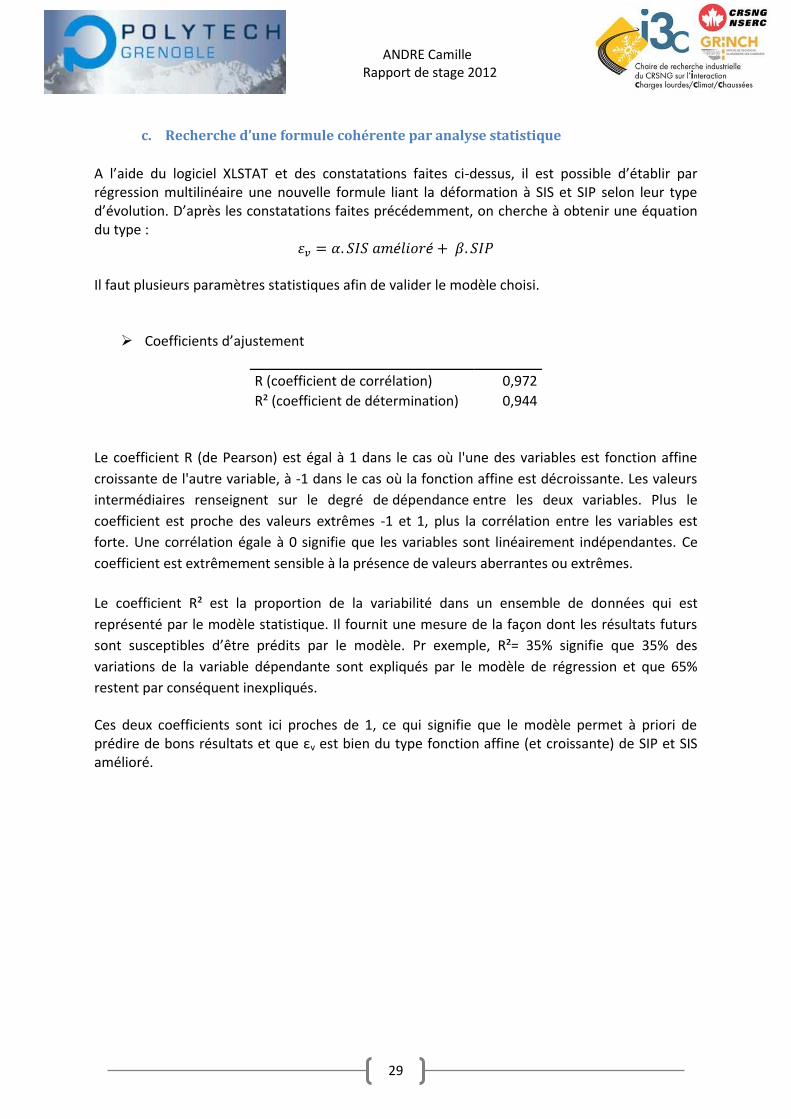
c. Recherche d’une formule cohérente par analyse statistique
A l’aide du logiciel XLSTAT et des constatations faites ci-dessus, il est possible d’établir par régression multilinéaire une nouvelle formule liant la déformation à SIS et SIP selon leur type d’évolution. D’après les constatations faites précédemment, on cherche à obtenir une équation du type :
Il faut plusieurs paramètres statistiques afin de valider le modèle choisi.
Coefficients d’ajustement
R (coefficient de corrélation) 0,972
R² (coefficient de détermination) 0,944
Le coefficient R (de Pearson) est égal à 1 dans le cas où l'une des variables est fonction affine
croissante de l'autre variable, à -1 dans le cas où la fonction affine est décroissante. Les valeurs
intermédiaires renseignent sur le degré de dépendance entre les deux variables. Plus le
coefficient est proche des valeurs extrêmes -1 et 1, plus la corrélation entre les variables est
forte. Une corrélation égale à 0 signifie que les variables sont linéairement indépendantes. Ce
coefficient est extrêmement sensible à la présence de valeurs aberrantes ou extrêmes.
Le coefficient R² est la proportion de la variabilité dans un ensemble de données qui est
représenté par le modèle statistique. Il fournit une mesure de la façon dont les résultats futurs
sont susceptibles d’être prédits par le modèle. Pr exemple, R²= 35% signifie que 35% des
variations de la variable dépendante sont expliqués par le modèle de régression et que 65%
restent par conséquent inexpliqués.
Ces deux coefficients sont ici proches de 1, ce qui signifie que le modèle permet à priori de prédire de bons résultats et que εv est bien du type fonction affine (et croissante) de SIP et SIS amélioré.
ANDRE Camille Rapport de stage 2012
30
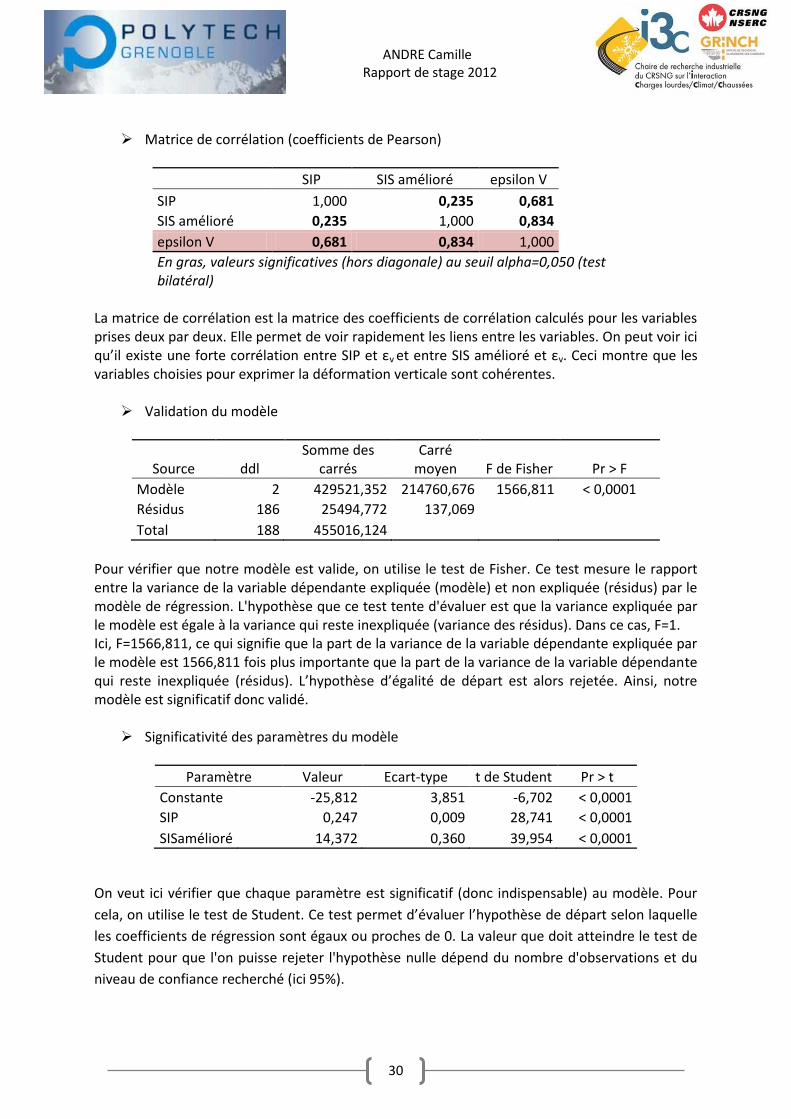
Matrice de corrélation (coefficients de Pearson)
SIP SIS amélioré epsilon V SIP 1,000 0,235 0,681 SIS amélioré 0,235 1,000 0,834 epsilon V 0,681 0,834 1,000 En gras, valeurs significatives (hors diagonale) au seuil alpha=0,050 (test
bilatéral)
La matrice de corrélation est la matrice des coefficients de corrélation calculés pour les variables prises deux par deux. Elle permet de voir rapidement les liens entre les variables. On peut voir ici qu’il existe une forte corrélation entre SIP et εv et entre SIS amélioré et εv. Ceci montre que les variables choisies pour exprimer la déformation verticale sont cohérentes.
Validation du modèle
Source ddl Somme des
carrés Carré
moyen F de Fisher Pr > F
Modèle 2 429521,352 214760,676 1566,811 < 0,0001
Résidus 186 25494,772 137,069 Total 188 455016,124
Pour vérifier que notre modèle est valide, on utilise le test de Fisher. Ce test mesure le rapport entre la variance de la variable dépendante expliquée (modèle) et non expliquée (résidus) par le modèle de régression. L'hypothèse que ce test tente d'évaluer est que la variance expliquée par le modèle est égale à la variance qui reste inexpliquée (variance des résidus). Dans ce cas, F=1. Ici, F=1566,811, ce qui signifie que la part de la variance de la variable dépendante expliquée par le modèle est 1566,811 fois plus importante que la part de la variance de la variable dépendante qui reste inexpliquée (résidus). L’hypothèse d’égalité de départ est alors rejetée. Ainsi, notre modèle est significatif donc validé.
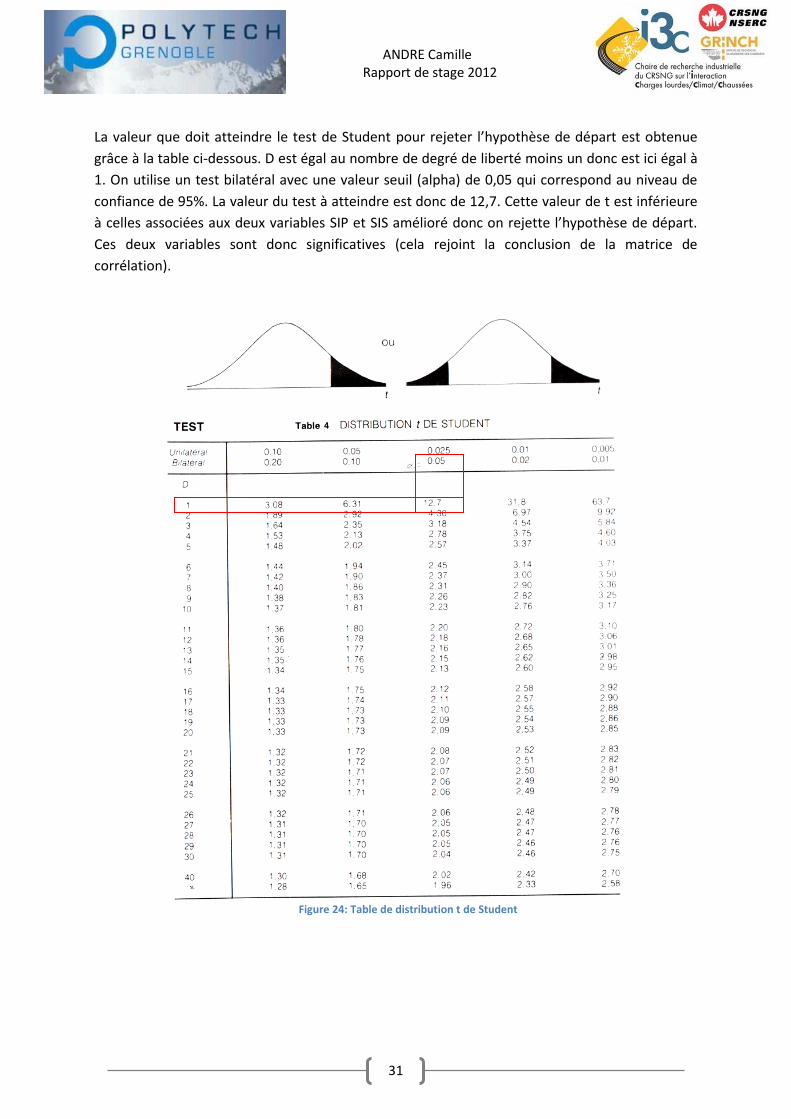
Significativité des paramètres du modèle
Paramètre Valeur Ecart-type t de Student Pr > t
Constante -25,812 3,851 -6,702 < 0,0001
SIP 0,247 0,009 28,741 < 0,0001
SISamélioré 14,372 0,360 39,954 < 0,0001
On veut ici vérifier que chaque paramètre est significatif (donc indispensable) au modèle. Pour
cela, on utilise le test de Student. Ce test permet d’évaluer l’hypothèse de départ selon laquelle
les coefficients de régression sont égaux ou proches de 0. La valeur que doit atteindre le test de
Student pour que l'on puisse rejeter l'hypothèse nulle dépend du nombre d'observations et du
niveau de confiance recherché (ici 95%).
ANDRE Camille Rapport de stage 2012
31
La valeur que doit atteindre le test de Student pour rejeter l’hypothèse de départ est obtenue
grâce à la table ci-dessous. D est égal au nombre de degré de liberté moins un donc est ici égal à
1. On utilise un test bilatéral avec une valeur seuil (alpha) de 0,05 qui correspond au niveau de
confiance de 95%. La valeur du test à atteindre est donc de 12,7. Cette valeur de t est inférieure
à celles associées aux deux variables SIP et SIS amélioré donc on rejette l’hypothèse de départ.
Ces deux variables sont donc significatives (cela rejoint la conclusion de la matrice de
corrélation).
Figure 24: Table de distribution t de Student
ANDRE Camille Rapport de stage 2012
32
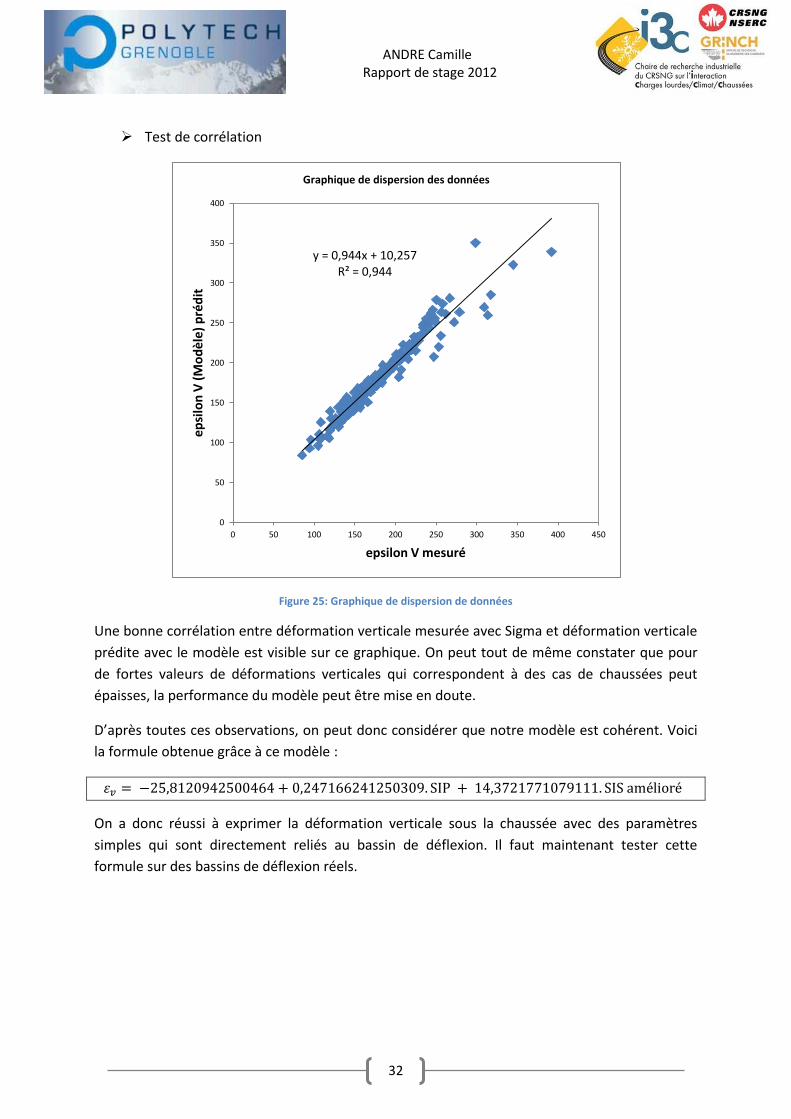
Test de corrélation
Figure 25: Graphique de dispersion de données
Une bonne corrélation entre déformation verticale mesurée avec Sigma et déformation verticale
prédite avec le modèle est visible sur ce graphique. On peut tout de même constater que pour
de fortes valeurs de déformations verticales qui correspondent à des cas de chaussées peut
épaisses, la performance du modèle peut être mise en doute.
D’après toutes ces observations, on peut donc considérer que notre modèle est cohérent. Voici
la formule obtenue grâce à ce modèle :
On a donc réussi à exprimer la déformation verticale sous la chaussée avec des paramètres
simples qui sont directement reliés au bassin de déflexion. Il faut maintenant tester cette
formule sur des bassins de déflexion réels.
y = 0,944x + 10,257 R² = 0,944
0
50
100
150
200
250
300
350
400
0 50 100 150 200 250 300 350 400 450
ep
silo
n V
(M
od
èle
) p
réd
it
epsilon V mesuré
Graphique de dispersion des données
ANDRE Camille Rapport de stage 2012
33
4. Validation et calibration de la formule avec des essais effectué sur le
terrain
a. Instrumentation des sites du SERUL et de Saint-Célestin
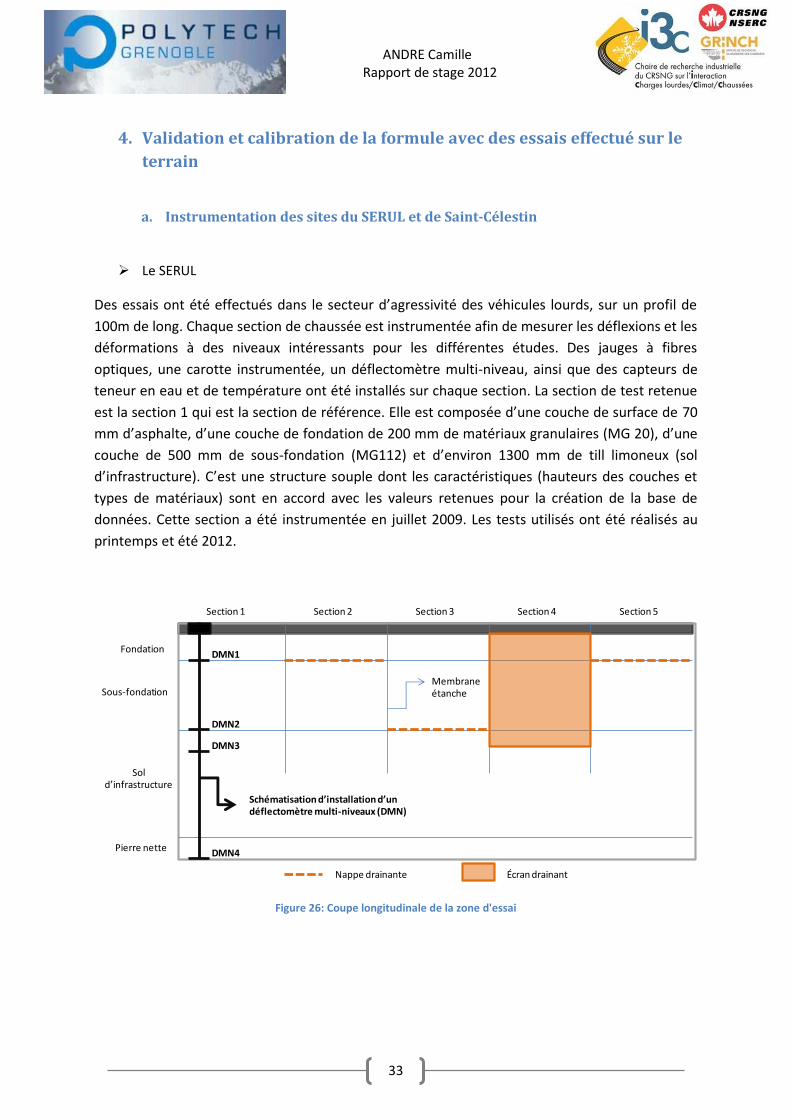
Le SERUL
Des essais ont été effectués dans le secteur d’agressivité des véhicules lourds, sur un profil de
100m de long. Chaque section de chaussée est instrumentée afin de mesurer les déflexions et les
déformations à des niveaux intéressants pour les différentes études. Des jauges à fibres
optiques, une carotte instrumentée, un déflectomètre multi-niveau, ainsi que des capteurs de
teneur en eau et de température ont été installés sur chaque section. La section de test retenue
est la section 1 qui est la section de référence. Elle est composée d’une couche de surface de 70
mm d’asphalte, d’une couche de fondation de 200 mm de matériaux granulaires (MG 20), d’une
couche de 500 mm de sous-fondation (MG112) et d’environ 1300 mm de till limoneux (sol
d’infrastructure). C’est une structure souple dont les caractéristiques (hauteurs des couches et
types de matériaux) sont en accord avec les valeurs retenues pour la création de la base de
données. Cette section a été instrumentée en juillet 2009. Les tests utilisés ont été réalisés au
printemps et été 2012.
Figure 26: Coupe longitudinale de la zone d'essai
Section 2 Section 3 Section 4 Section 5Section 1
Sous-fondation
Sol d’infrastructure
Pierre nette
Fondation
Schématisation d’installation d’un déflectomètre multi-niveaux (DMN)
Membrane étanche
Nappe drainante Écran drainant
DMN1
DMN3
DMN2
DMN4
ANDRE Camille Rapport de stage 2012
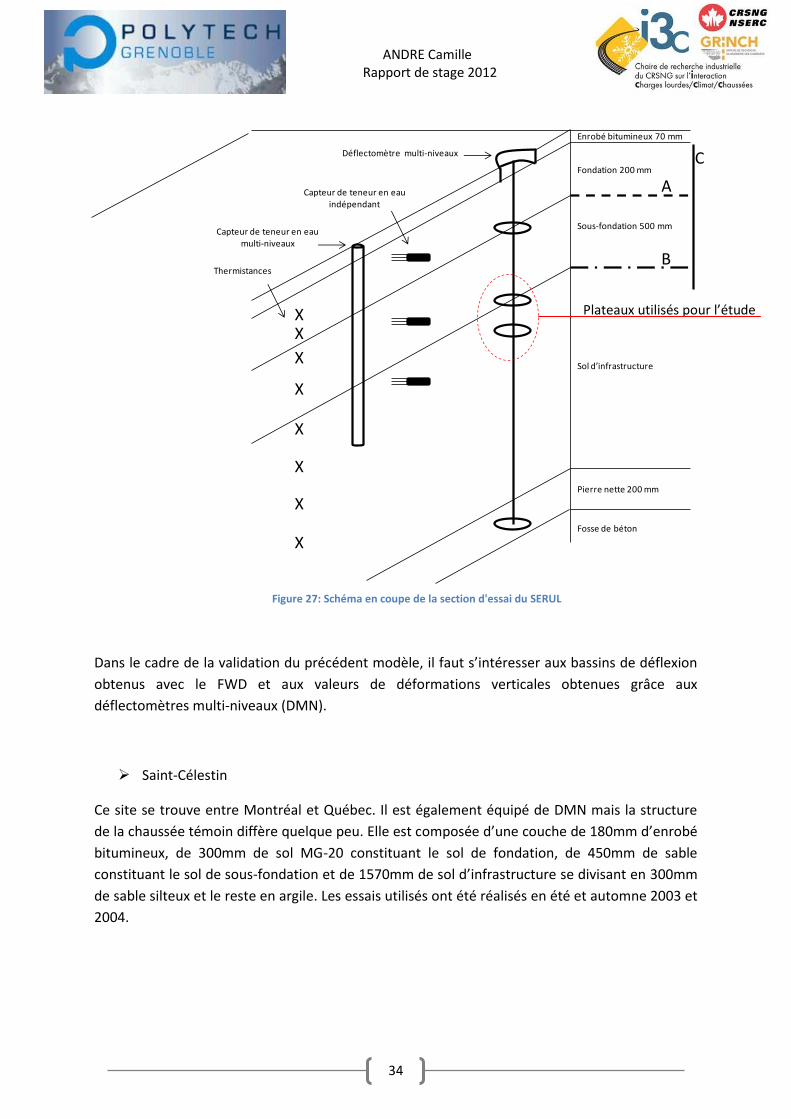
34
Dans le cadre de la validation du précédent modèle, il faut s’intéresser aux bassins de déflexion
obtenus avec le FWD et aux valeurs de déformations verticales obtenues grâce aux
déflectomètres multi-niveaux (DMN).
Saint-Célestin
Ce site se trouve entre Montréal et Québec. Il est également équipé de DMN mais la structure
de la chaussée témoin diffère quelque peu. Elle est composée d’une couche de 180mm d’enrobé
bitumineux, de 300mm de sol MG-20 constituant le sol de fondation, de 450mm de sable
constituant le sol de sous-fondation et de 1570mm de sol d’infrastructure se divisant en 300mm
de sable silteux et le reste en argile. Les essais utilisés ont été réalisés en été et automne 2003 et
2004.
Fondation 200 mm
Enrobé bitumineux 70 mm
Sous-fondation 500 mm
Fosse de béton
Sol d’infrastructure
Pierre nette 200 mm
XX
X
X
X
X
X
X
A
B
C
Capteur de teneur en eau indépendant
Déflectomètre multi-niveaux
Thermistances
Capteur de teneur en eau multi-niveaux
Plateaux utilisés pour l’étude
Figure 27: Schéma en coupe de la section d'essai du SERUL

ANDRE Camille Rapport de stage 2012
35
b. Le déflectomètre multi-niveau (DMN)
Le DMN sert à mesurer les déplacements de la structure de la
chaussée. Il est composé de quatre parties mobiles (1, 2, 3, 4 sur la
figure ci-contre) qui s’emboîtent les unes dans les autres. Ces axes
verticaux concentriques sont implantés chacun dans une couche
spécifique de la chaussée. La route a été forée préalablement à
l’installation. A ce moment, le matériau autour du DMN a été
compacté à l’aide d’outils de compactage (4 et 5 sur la figure ci-
contre). Le haut des quatre parties
mobiles est au niveau du
revêtement où il a été installé un
coffret contenant un support
destiné aux capteurs de mesure. Le
coffret est scellé au revêtement. Le
capteur global est composé en fait
de quatre capteurs qui mesurent
respectivement les déplacements
du plateau sur lequel ils sont
connectés.
Pour réaliser un essai, il faut placer les vis qui supporteront le capteur de mesure de telle façon
que la tête du capteur soit parallèle à la surface et qu’il soit possible de refermer la fosse.
Ensuite, le capteur est mis au contact des vis et est relié à l’ordinateur. La fosse est alors
refermée avec la plaque. Avant de réaliser l’essai, il faut s’assurer que la surface de contact avec
la charge soit homogène, aussi, une fine couche de sable passée préalablement au tamis est
déposée sur la plaque. Le FWD est alors utilisé pour simuler une charge sur la plaque contenant
le DMN.
Figure 28: Déflectomètre multi-niveaux installé dans la chaussée
Figure 29: Parties mobiles d'un DMN et outils nécessaires à la mise en place
Figure 30: Etapes de réalisation d'un essai DMN
ANDRE Camille Rapport de stage 2012
36
Après avoir dépouillé les résultats, il faut calculer les déformations verticales réelles au toit du
sol d’infrastructure. Pour cela, il faut soustraire les déplacements verticaux mesurés sur le
plateau situé à l’interface sol d’infrastructure/sol de sous-fondation avec ceux mesurés sur le
plateau placé dans les 30 premiers centimètres du sol d’infrastructure et diviser le résultat par la
différence de hauteur entre ces deux plateaux (30cm).
c. Les essais FWD
Les essais ont été effectués à trois endroits différents sur la section de référence. Après
dépouillement des données obtenues, on peut calculer les déformations verticales au toit du sol
d’infrastructure avec la formule du modèle.
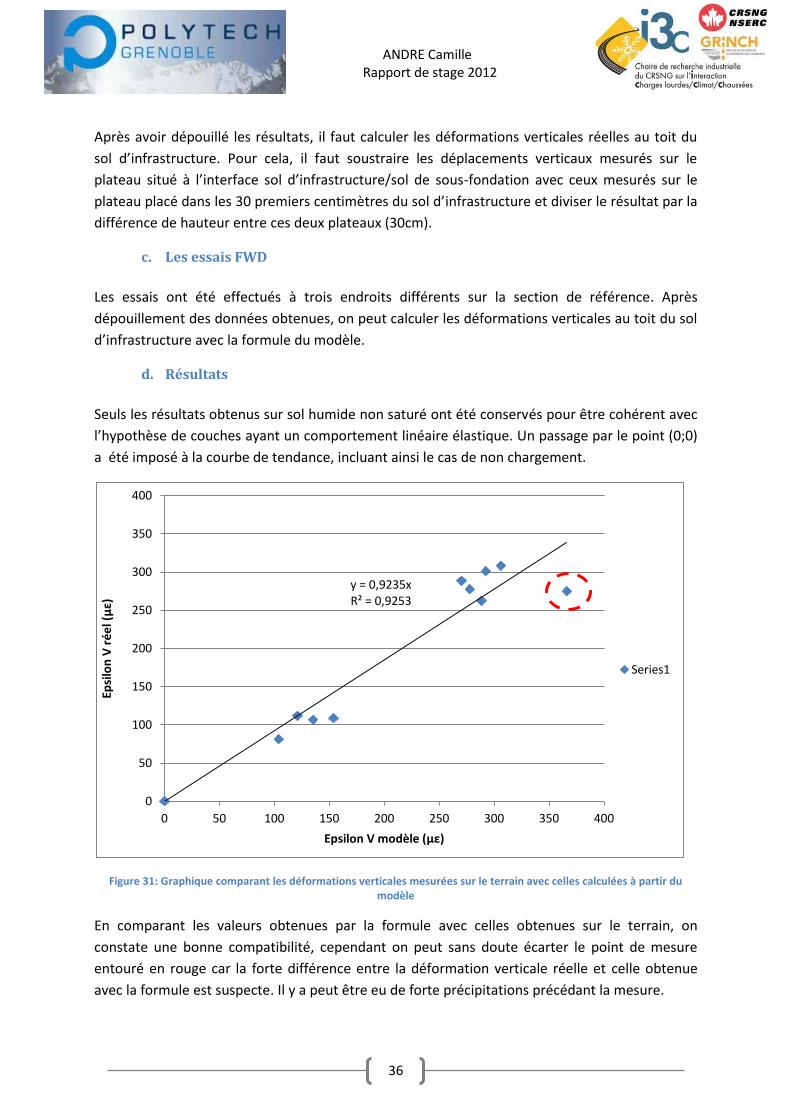
d. Résultats
Seuls les résultats obtenus sur sol humide non saturé ont été conservés pour être cohérent avec
l’hypothèse de couches ayant un comportement linéaire élastique. Un passage par le point (0;0)
a été imposé à la courbe de tendance, incluant ainsi le cas de non chargement.
Figure 31: Graphique comparant les déformations verticales mesurées sur le terrain avec celles calculées à partir du modèle
En comparant les valeurs obtenues par la formule avec celles obtenues sur le terrain, on
constate une bonne compatibilité, cependant on peut sans doute écarter le point de mesure
entouré en rouge car la forte différence entre la déformation verticale réelle et celle obtenue
avec la formule est suspecte. Il y a peut être eu de forte précipitations précédant la mesure.
y = 0,9235x R² = 0,9253
0
50
100
150
200
250
300
350
400
0 50 100 150 200 250 300 350 400
Epsi
lon
V r
ée
l (μ
ε)
Epsilon V modèle (με)
Series1
ANDRE Camille Rapport de stage 2012
37
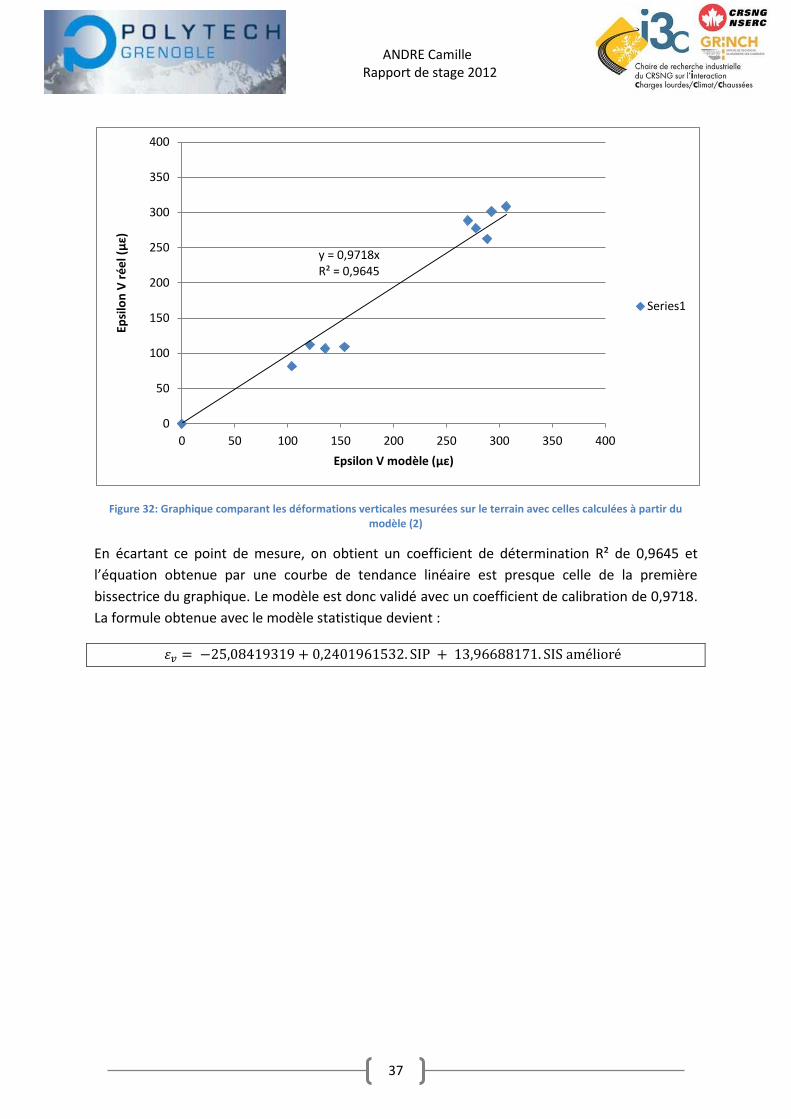
Figure 32: Graphique comparant les déformations verticales mesurées sur le terrain avec celles calculées à partir du modèle (2)
En écartant ce point de mesure, on obtient un coefficient de détermination R² de 0,9645 et
l’équation obtenue par une courbe de tendance linéaire est presque celle de la première
bissectrice du graphique. Le modèle est donc validé avec un coefficient de calibration de 0,9718.
La formule obtenue avec le modèle statistique devient :
y = 0,9718x R² = 0,9645
0
50
100
150
200
250
300
350
400
0 50 100 150 200 250 300 350 400
Epsi
lon
V r
ée
l (μ
ε)
Epsilon V modèle (με)
Series1
ANDRE Camille Rapport de stage 2012
38
IV. Comparaison des données obtenues par éléments finis avec
des données obtenues par calcul analytique
Le modèle précédent à été réalisé avec le logiciel Sigma, qui procède par éléments finis. Même si
le calcul par éléments finis semble précis, il est de bon ton de comparer les résultats obtenus par
le logiciel Sigma avec ceux obtenus avec un autre logiciel. Le logiciel Winjulea qui réalise des
calculs analytiques a été choisi pour faire cette étude.
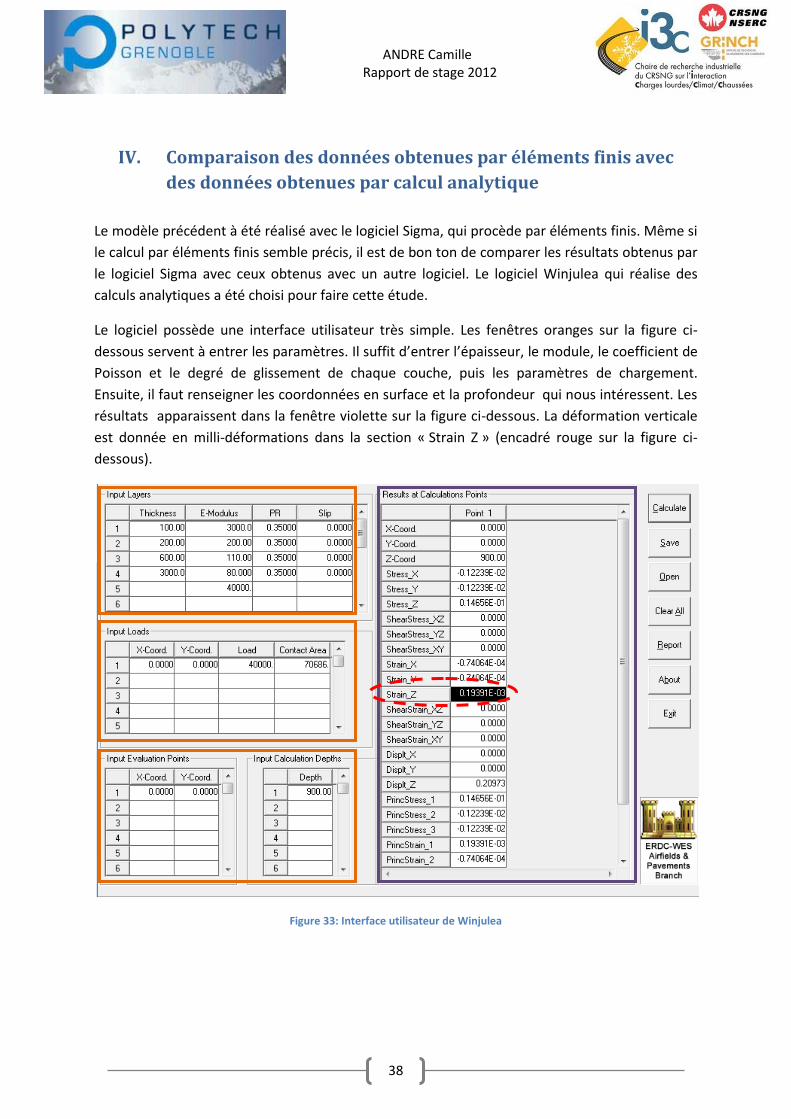
Le logiciel possède une interface utilisateur très simple. Les fenêtres oranges sur la figure ci-
dessous servent à entrer les paramètres. Il suffit d’entrer l’épaisseur, le module, le coefficient de
Poisson et le degré de glissement de chaque couche, puis les paramètres de chargement.
Ensuite, il faut renseigner les coordonnées en surface et la profondeur qui nous intéressent. Les
résultats apparaissent dans la fenêtre violette sur la figure ci-dessous. La déformation verticale
est donnée en milli-déformations dans la section « Strain Z » (encadré rouge sur la figure ci-
dessous).
Figure 33: Interface utilisateur de Winjulea
ANDRE Camille Rapport de stage 2012
39
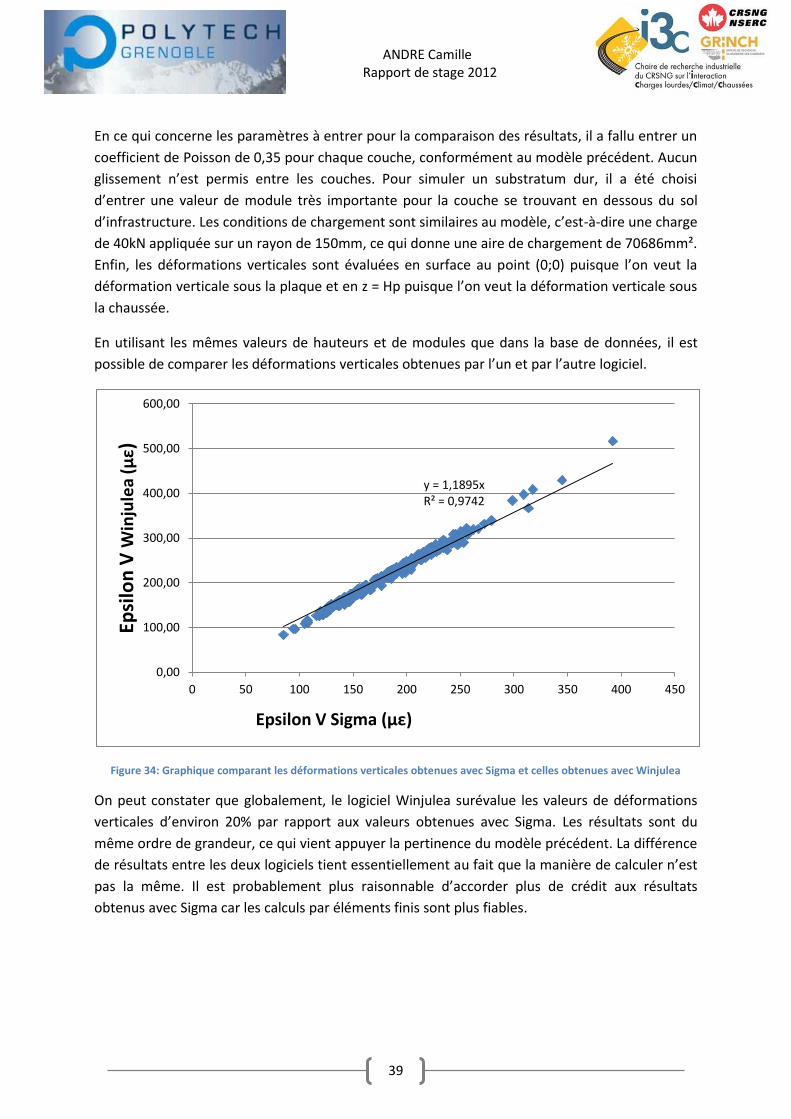
En ce qui concerne les paramètres à entrer pour la comparaison des résultats, il a fallu entrer un
coefficient de Poisson de 0,35 pour chaque couche, conformément au modèle précédent. Aucun
glissement n’est permis entre les couches. Pour simuler un substratum dur, il a été choisi
d’entrer une valeur de module très importante pour la couche se trouvant en dessous du sol
d’infrastructure. Les conditions de chargement sont similaires au modèle, c’est-à-dire une charge
de 40kN appliquée sur un rayon de 150mm, ce qui donne une aire de chargement de 70686mm².
Enfin, les déformations verticales sont évaluées en surface au point (0;0) puisque l’on veut la
déformation verticale sous la plaque et en z = Hp puisque l’on veut la déformation verticale sous
la chaussée.
En utilisant les mêmes valeurs de hauteurs et de modules que dans la base de données, il est
possible de comparer les déformations verticales obtenues par l’un et par l’autre logiciel.
Figure 34: Graphique comparant les déformations verticales obtenues avec Sigma et celles obtenues avec Winjulea
On peut constater que globalement, le logiciel Winjulea surévalue les valeurs de déformations
verticales d’environ 20% par rapport aux valeurs obtenues avec Sigma. Les résultats sont du
même ordre de grandeur, ce qui vient appuyer la pertinence du modèle précédent. La différence
de résultats entre les deux logiciels tient essentiellement au fait que la manière de calculer n’est
pas la même. Il est probablement plus raisonnable d’accorder plus de crédit aux résultats
obtenus avec Sigma car les calculs par éléments finis sont plus fiables.
y = 1,1895x R² = 0,9742
0,00
100,00
200,00
300,00
400,00
500,00
600,00
0 50 100 150 200 250 300 350 400 450
Epsi
lon
V W
inju
lea
(με)
Epsilon V Sigma (με)
ANDRE Camille Rapport de stage 2012
40
V. Vers un dépouillement simple des bassins de déflexion
Des travaux précédents ont abouti à une formule permettant de connaître les déformations
latérales sous la couche d’enrobé, déformations qui sont responsables de la fatigue de la
chaussée. La présente étude a permis la mise au point d’une formule pour connaître les
déformations verticales en bas de chaussée qui sont responsables à long terme de l’orniérage de
la chaussée. Ces deux formules utilisent des paramètres de bassins de déflexion.
Après de nombreux essais réalisés sur le terrain, il s’est avéré que le traitement de ces données
afin de caractériser les chaussées était long et fastidieux. Par exemple, le calcul des
déformations verticales sous la chaussée nécessite le calcul de SIS « amélioré » dont les
déflexions utilisées pour le calcul varient en fonction de l’épaisseur de la chaussée. De plus, ce
paramètre nécessite le calcul d’interpolations et parfois même d’extrapolations, ce qui peut
devenir laborieux s’il y a beaucoup de bassins à analyser.
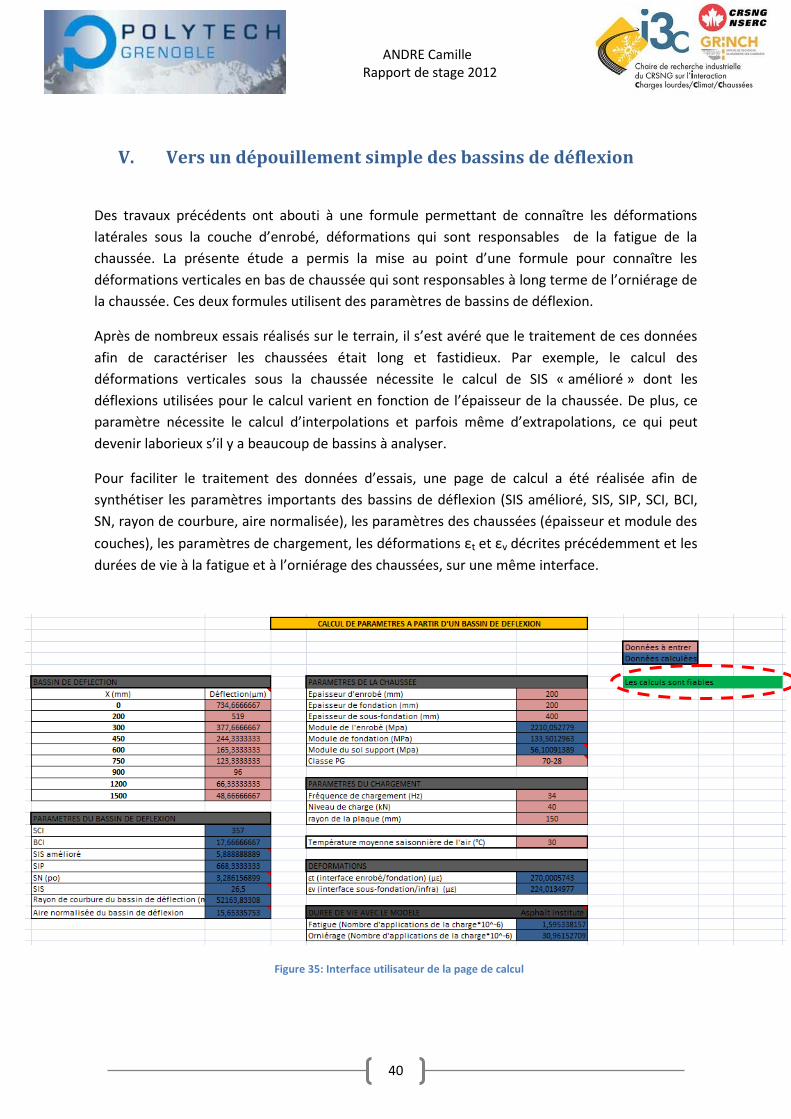
Pour faciliter le traitement des données d’essais, une page de calcul a été réalisée afin de
synthétiser les paramètres importants des bassins de déflexion (SIS amélioré, SIS, SIP, SCI, BCI,
SN, rayon de courbure, aire normalisée), les paramètres des chaussées (épaisseur et module des
couches), les paramètres de chargement, les déformations εt et εv décrites précédemment et les
durées de vie à la fatigue et à l’orniérage des chaussées, sur une même interface.
Figure 35: Interface utilisateur de la page de calcul
ANDRE Camille Rapport de stage 2012
41
L’emploi de cette page est très simple puisqu’il suffit à l’utilisateur de renseigner toutes les cases
roses pour que la page calcule tous les paramètres affichés en bleu sur la figure ci-dessus.
Aucune formule ou calcul n’apparaît sur cette page. Une autre feuille est dédiée à cet effet et est
verrouillée pour l’utilisateur.
Lors du calcul de SIS amélioré et de SIS, il arrive que des extrapolations soient nécessaires. Elles
peuvent être source d’imprécision et d’erreur si elles concernent des déflexions à des points
d’abscisse trop éloignés du dernier géophone situé à 1500mm du centre de la plaque. Il est donc
important d’avertir l’utilisateur si une ou deux extrapolations ont été faites dans le calcul des
différents paramètres. Cette information s’affiche sur la page de calcul (encadré pointillé rouge
sur la figure ci-dessus). Dans le cas présenté sur la figure, aucune extrapolation n’a été
nécessaire donc les calculs sont considérés comme fiables.
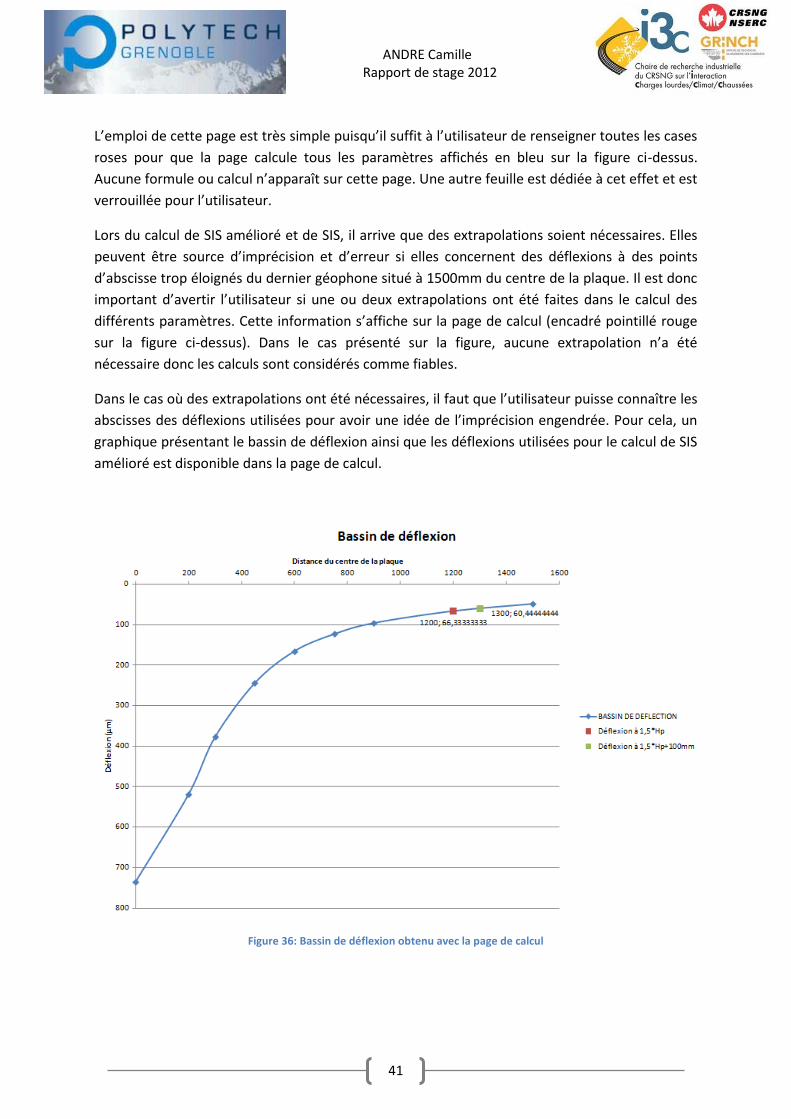
Dans le cas où des extrapolations ont été nécessaires, il faut que l’utilisateur puisse connaître les
abscisses des déflexions utilisées pour avoir une idée de l’imprécision engendrée. Pour cela, un
graphique présentant le bassin de déflexion ainsi que les déflexions utilisées pour le calcul de SIS
amélioré est disponible dans la page de calcul.
Figure 36: Bassin de déflexion obtenu avec la page de calcul
ANDRE Camille Rapport de stage 2012
42
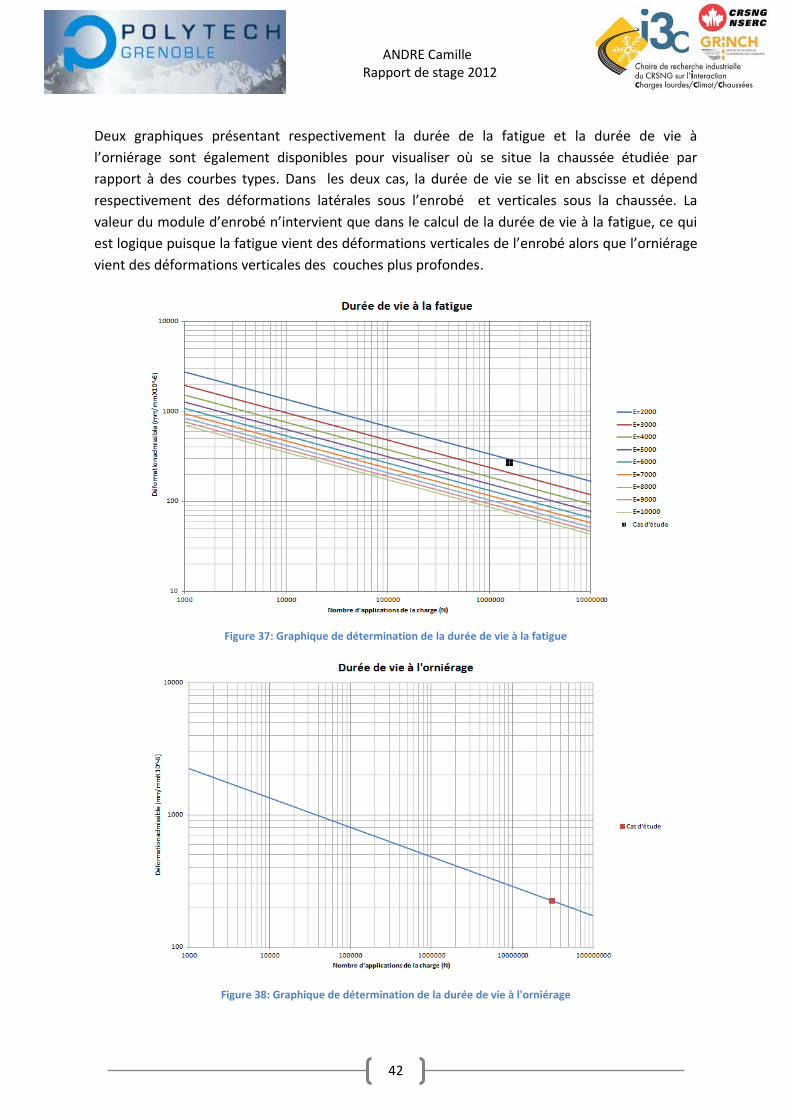
Deux graphiques présentant respectivement la durée de la fatigue et la durée de vie à
l’orniérage sont également disponibles pour visualiser où se situe la chaussée étudiée par
rapport à des courbes types. Dans les deux cas, la durée de vie se lit en abscisse et dépend
respectivement des déformations latérales sous l’enrobé et verticales sous la chaussée. La
valeur du module d’enrobé n’intervient que dans le calcul de la durée de vie à la fatigue, ce qui
est logique puisque la fatigue vient des déformations verticales de l’enrobé alors que l’orniérage
vient des déformations verticales des couches plus profondes.
Figure 37: Graphique de détermination de la durée de vie à la fatigue
Figure 38: Graphique de détermination de la durée de vie à l'orniérage

ANDRE Camille Rapport de stage 2012
43
VI. Discussion et limite de validité
1. Le modèle
Les valeurs provenant de la base de données ont été obtenues à partir d’un modèle qui est une
simplification du problème réel. En effet, toutes les couches de matériau sont supposées
homogènes, isotropes, de même coefficient de Poisson (0,35), ayant un comportement linéaire
élastique et ne permettant aucun glissement aux interfaces des couches. Il a été observé que
l’hypothèse d’un comportement linéaire élastique n’était plus valable pour des sols mouillés à
saturés lors des essais réalisés. Ce modèle ne prend donc pas en compte l’effet saisonnier qui
peut changer les conditions structurelles des chaussées, surtout à cause du phénomène de
gel/dégel présent dans tout le Canada. De plus, le chargement de l’essai est considéré comme
statique avec une distribution uniforme de la charge alors que le FWD génère un impact sur la
chaussée et que l’analyse statique ne permet pas de tenir compte des conditions de chargement
propres à chaque appareil de mesure alors que cela peut influencer les déflexions. On peut aussi
se demander si ce modèle est correct pour d’autres types de chaussées et matériaux qu’il est
possible de rencontrer car les essais ont été réalisés uniquement sur des chaussées souples
constituées des mêmes matériaux. Afin de permettre une meilleure validation, il serait
nécessaire de recueillir plus de données de terrain pour des matériaux différents.
ANDRE Camille Rapport de stage 2012
44
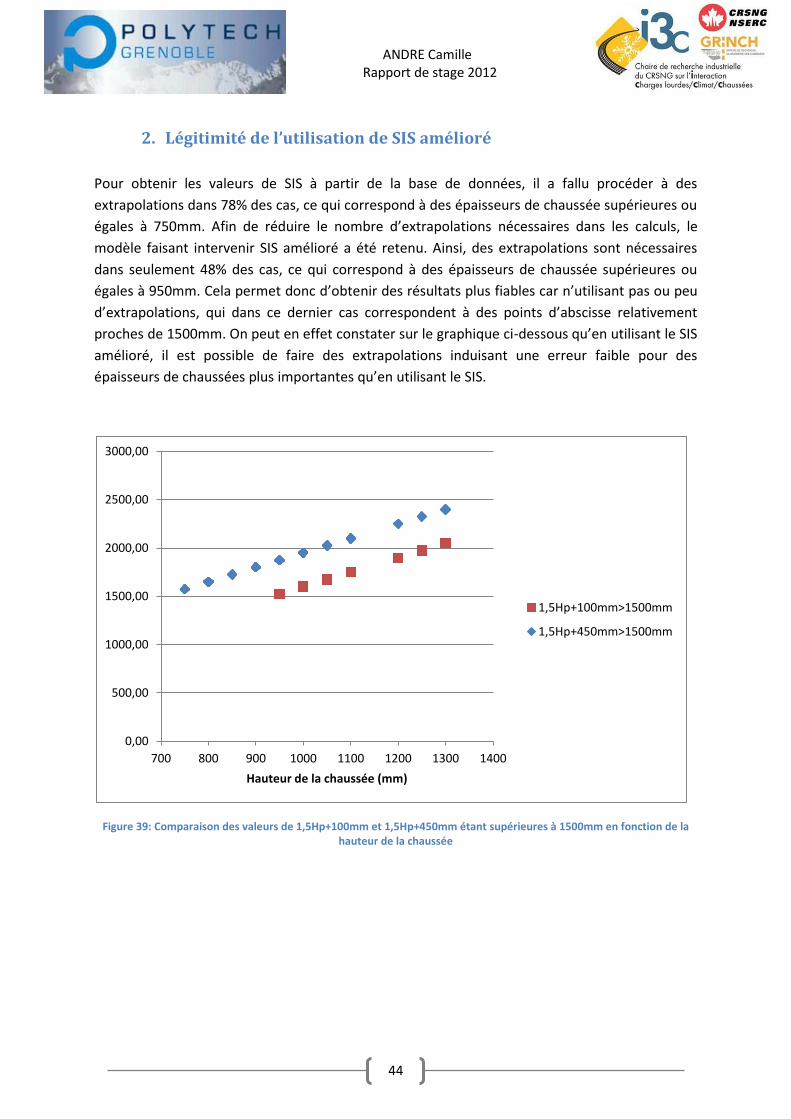
2. Légitimité de l’utilisation de SIS amélioré
Pour obtenir les valeurs de SIS à partir de la base de données, il a fallu procéder à des
extrapolations dans 78% des cas, ce qui correspond à des épaisseurs de chaussée supérieures ou
égales à 750mm. Afin de réduire le nombre d’extrapolations nécessaires dans les calculs, le
modèle faisant intervenir SIS amélioré a été retenu. Ainsi, des extrapolations sont nécessaires
dans seulement 48% des cas, ce qui correspond à des épaisseurs de chaussée supérieures ou
égales à 950mm. Cela permet donc d’obtenir des résultats plus fiables car n’utilisant pas ou peu
d’extrapolations, qui dans ce dernier cas correspondent à des points d’abscisse relativement
proches de 1500mm. On peut en effet constater sur le graphique ci-dessous qu’en utilisant le SIS
amélioré, il est possible de faire des extrapolations induisant une erreur faible pour des
épaisseurs de chaussées plus importantes qu’en utilisant le SIS.
Figure 39: Comparaison des valeurs de 1,5Hp+100mm et 1,5Hp+450mm étant supérieures à 1500mm en fonction de la hauteur de la chaussée
0,00
500,00
1000,00
1500,00
2000,00
2500,00
3000,00
700 800 900 1000 1100 1200 1300 1400
Hauteur de la chaussée (mm)
1,5Hp+100mm>1500mm
1,5Hp+450mm>1500mm
ANDRE Camille Rapport de stage 2012
45
VII. Une expérience humaine
Cette dernière partie concerne la vie dans l’équipe ainsi que les aspects formateurs de ce stage.
1. L’insertion dans l’équipe
Grâce à M.Doré, j’ai pu être intégrée à une équipe de recherche. J’ai pu voir énormément de communication entre les membres du groupe. Par exemple, de nombreuses réunions sont organisées pour faire le point sur tous les projets, savoir si du matériel particulier est nécessaire. Si plusieurs personnes ont besoin du même matériel, il faut planifier les essais de chacun. Il est très intéressant de parler des projets de chacun car les résultats ou avancées de certains projets peuvent servir à d’autres. Ces réunions sont plutôt détendues, ce qui est agréable. De plus, des activités (golf, volley, repas,…) sont souvent organisées au sein de la chaire pour créer et entretenir une dynamique de groupe. J’ai donc été intégrée assez rapidement dans cette équipe.
2. La découverte de logiciels
J’ai passé la plus grande partie de mon stage à effectuer du traitement de données acquises grâce au modèle réalisé. J’ai ainsi pu découvrir de nombreux logiciels. J’ai tout d’abord utilisé le logiciel SIGMA pour réaliser le modèle en éléments finis. J’ai ensuite comparé les résultats obtenus avec un autre logiciel, WINJULEA, qui utilise des calculs analytiques. J’ai également utilisé un logiciel d’analyse statistique pour appréhender différents modèles en fonction de différentes variables. Ce logiciel, XLSTAT, est une sorte d’extension qui s’installe sur Excel. J’ai d’ailleurs beaucoup perfectionné mon utilisation d’Excel lors de toutes ces manipulations de données et de la réalisation de la page de calcul.
3. Les méthodes de travail
Le travail au sein de la chaire est multidisciplinaire. Pour traiter mon seul projet, j’ai utilisé des bases de mécanique des sols et de statistique ainsi que des outils informatiques, ce qui permet d’apprendre beaucoup de choses dans plusieurs domaines en se documentant. Le travail en recherche est très intéressant car il est possible d’utiliser des résultats obtenus lors de précédentes études pour continuer d’avancer sur d’autres points. On sent que tout est imbriqué et lié d’une certaine façon, ce qui offre de nombreuses possibilités d’études. Cependant, comme les travaux concernent souvent des concepts nouveaux, il faut être patient car les avancées sont progressives et parfois par tâtonnement. Il arrive aussi que l’on soit confronté à un problème nouveau, donc il faut savoir trouver les outils nécessaires pour le résoudre. En ce sens, j’ai pu constater que le personnel de recherche ayant une grande expérience était très compétent et m’a beaucoup aidé dans mon travail.

ANDRE Camille Rapport de stage 2012
46
Conclusion
Au niveau personnel, ce stage m’a permis de découvrir le monde de la recherche s’appliquant au domaine du génie routier, plus particulièrement à l’interaction entre les charges lourdes, le climat et la chaussée. J’ai évolué dans ce milieu pendant 10 semaines en gérant le projet que m’a confié M.Doré. Ce projet a permis d’établir un modèle de prédiction de la déformation verticale sous la
chaussée qui soit le plus simple d’utilisation possible. Les bénéfices de cette recherche sont
importants puisqu’ils permettent de connaitre les caractéristiques structurales d’une chaussée à
partir de résultats obtenus lors d’essais au FWD. Associé à une précédente étude portant sur un
modèle de prédiction des déformations transversales sous l’enrobé, ce nouveau modèle s’avère
être utile pour analyser les effets saisonniers sur le comportement structural de la chaussée et
pour prédire la durée de vie en fatigue du revêtement à partir des déformations maximales en
traction à la base de revêtement. La durée de vie à l’orniérage est également accessible à partir
de la déformation verticale sous la chaussée. La page de calcul est un condensé de ces études et
présente des informations structurales importantes des chaussées.

ANDRE Camille Rapport de stage 2012
47
Table des illustrations Figure 1: Le Canada et ses provinces ....................................................................................................... 6
Figure 2: Le Québec ................................................................................................................................. 6
Figure 3: Le campus universitaire ............................................................................................................ 7
Figure 4: Organigramme de l’équipe de recherche du laboratoire ........................................................ 8
Figure 5: Projets en cours au laboratoire ................................................................................................ 9
Figure 6: Travaux réalisés sur le site du SERUL ..................................................................................... 11
Figure 7: Organigramme des moyens financiers ................................................................................... 12
Figure 8: Schématisation des déformations induites par le passage d'un véhicule.............................. 15
Figure 9: Principe de mesure du déflectographe Lacroix ...................................................................... 16
Figure 10: Mesure de déflexions avec un FWD ..................................................................................... 17
Figure 11: Principe de mesure d'un FWD .............................................................................................. 17
Figure 12: Tableau comparatif du défectographe Lacroix et du FWD .................................................. 19
Figure 13: Paramètres généraux de déflexion ...................................................................................... 21
Figure 14: Paramètres de Rohde ........................................................................................................... 21
Figure 15: Paramètres et unités utilisés ................................................................................................ 22
Figure 16: Intervalles d'étude pour chaque paramètre ........................................................................ 23
Figure 17: Modèle éléments finis utilisé ............................................................................................... 24
Figure 18: Exemple de pointage des déflexions en surface de chaussée ............................................. 25
Figure 20: Valeurs des modules pour cet exemple ............................................................................... 26
Figure 19: Exemple d'une partie de base de données .......................................................................... 26
Figure 21: Code couleur de la base de données ................................................................................... 27
Figure 22: Evolution des déformations verticales en fonction du coefficient SIS amélioré ................. 28
Figure 23: Evolution des déformations verticales en fonction du coefficient SIP................................. 28
Figure 24: Table de distribution t de Student ....................................................................................... 31
Figure 25: Graphique de dispersion de données .................................................................................. 32
Figure 26: Coupe longitudinale de la zone d'essai ................................................................................ 33
Figure 27: Schéma en coupe de la section d'essai du SERUL ................................................................ 34
Figure 28: Déflectomètre multi-niveaux installé dans la chaussée ....................................................... 35
Figure 29: Parties mobiles d'un DMN et outils nécessaires à la mise en place ..................................... 35
Figure 30: Etapes de réalisation d'un essai DMN .................................................................................. 35
Figure 31: Graphique comparant les déformations verticales mesurées sur le terrain avec celles
calculées à partir du modèle ................................................................................................................. 36
Figure 32: Graphique comparant les déformations verticales mesurées sur le terrain avec celles
calculées à partir du modèle (2) ............................................................................................................ 37
Figure 33: Interface utilisateur de Winjulea .......................................................................................... 38
Figure 34: Graphique comparant les déformations verticales obtenues avec Sigma et celles obtenues
avec Winjulea ........................................................................................................................................ 39
Figure 35: Interface utilisateur de la page de calcul ............................................................................. 40
Figure 36: Bassin de déflexion obtenu avec la page de calcul .............................................................. 41
Figure 37: Graphique de détermination de la durée de vie à la fatigue ............................................... 42
Figure 38: Graphique de détermination de la durée de vie à l'orniérage ............................................. 42
Figure 39: Comparaison des valeurs de 1,5Hp+100mm et 1,5Hp+450mm étant supérieures à 1500mm
en fonction de la hauteur de la chaussée ............................................................................................. 44
ANDRE Camille Rapport de stage 2012
48
Liste des symboles et abréviations - FWD : Falling weight déflectomètre
- DMN : Déflectomètre Multi-Niveaux
- εt : Déformation transversale sous la couche de béton bitumineux
- εv : Déformation verticale sous la couche de sous-fondation
- a : Rayon de la plaque du FWD
- M : Masse tombante
- R : Rayon de courbure du bassin de déflexion
- A : Aire normalisée du bassin de déflexion
- D0 : Déflexion sous le centre de la plaque
-DX : Déflexion sous le x-ième géophone
- Hp : Hauteur de la chaussée
- SCI : Indice de courbure superficiel
- BCI : Indice de courbure de base
- SIS : Indice structurel du sol de fondation
- SIP : Indice structurel de la chaussée
- SN : Nombre structurel de la chaussée
- HBB : Hauteur de la couche de béton bitumineux
- EBB : Module de la couche de béton bitumineux
- HFond : Hauteur de la couche de fondation
- EFond : Module de la couche de fondation
- HSSFond : Hauteur de la couche de sous-fondation
- ESSFond : Module de la couche de sous-fondation
- EInfra : Module du sol d’infrastructure
Liste des logiciels utilisés
- Excel 2007
- XLSTAT : logiciel d'analyse de données et de statistiques
- Winjulea : logiciel de calcul analytique
- Geostudio (Sigma): logiciel de modélisation aux éléments finis
- SoftProSens : logiciel de traitement des données recueillis sur la plaque lors des essais terrain
ANDRE Camille Rapport de stage 2012
49
Références
Barbara G. Tabachnick-Linda S. Fidell, 1989, Using Multivariate statistics
G.Robert Tessier, 1990, Guide de construction et d’entretien des chaussées
N. Gilbert et J.G. Savard, 1992, Statistiques
Denis St-Laurent, mémoire 1995, Evaluation structurale de chaussées souples dans un contexte climatique nordique David Croney-Paul Croney, 1998, Design and performance of road pavements
Kate De Blois, mémoire2005, Analyse du comportement saisonnier de planches expérimentales et validation du nouvel indice d’affaiblissement au dégel Simon Grenier, thèse 2007, Analyse dynamique du déflectomètre à masse tombante Tome I et II Guy Doré-Hannele K. Zubeck, 2009, Cold regions pavement engineering
Guy Doré,2009- 2010, Conception et rehabilitation des chausses, parties 1 et 2
Claudia Andrea Mellizo Suarez, 2010, Estimation du module réversible des matériaux granulaires de chaussées Sébastien Wurckler, projet de fin d’étude 2010, Développement de technique d’auscultation des chaussées J.P. Bilodeau-Guy Doré, article de presse scientifique 2012, Estimation of tensile strains at the
bottom of asphalt concrete layers under wheel loading using deflection basins from falling
weight deflectometer tests
Chaire Industrielle du CRSNG sur l’Interaction Charges lourdes – Climat – Chaussées (i3C), 2012, Évaluation du bénéfice technico-économique associé à l’utilisation de technologies drainante de type géosynthétique dans les structures de chaussées flexibles en contexte climatique nordique Félix Doucet et Guy Doré, Module Dynamique et Angle de Phase des Enrobés C-LTPP Damien Grellet, thèse, Évaluation de l’impact de la pression et des types de pneus sur la résistance en fatigue des chaussées souples http://www.infralab.ch/pdf/actualites/article_finale_rt.pdf
http://fr.wikipedia.org/wiki/Corr%C3%A9lation_(statistiques)
http://www.jybaudot.fr/Correlations/matcorr.html
http://www.batd.eu/debodt/downloads/regexcel.pdf
ANDRE Camille Rapport de stage 2012
50
Etudiant : ANDRE Camille Année d’études dans le département : 4ième année Entreprise : Université Laval-Département de génie civil Adresse complète : 1065 Avenue de la Médecine, G1V 0A6 Québec, Canada Téléphone : 418-656-2131 Télécopie : 418-656-2928 Responsable administratif : M.DORE Guy E-mail : [email protected] Maître de stage: M.DORE Guy Tuteur enseignant Polytech’ Grenoble : M.RICOTIER, enseignant en RDM Téléphone : 04.76.82.79.96
TITRE : Détermination de données structurales des chaussées RESUME : Le passage de charges lourdes sur les chaussées induit des déformations. L’étude que j’ai menée a pour but, en fonction des paramètres des différentes couches de la chaussée (hauteurs et modules d’Young) et de paramètres caractérisant les bassins de déflexions (SIS et SIP), d’évaluer les déformations verticales dues à ce type de charges, au toit du sol d’infrastructure. Ce projet est basé sur l’analyse de bassins de déflexions obtenus :
- à partir de logiciels (de modélisation par éléments finis ou de calcul analytique) simulant le chargement ponctuel de différentes structures de chaussées ;
- à partir d’essais au déflectomètre à masse tombante (FWD) réalisés sur le site expérimental routier de l’université Laval (SERUL). Les résultats ont été obtenus grâce à des déflectomètres multi-niveaux équipés de jauges situées à divers niveaux dans la structure de chaussée pour mesurer notamment la déformation verticale au sommet du sol d’infrastructure.
La première étape de l’étude vise à déterminer l’évolution (linéaire ou logarithmique par exemple) de tous les paramètres. Ensuite, par une étude statistique, il faut analyser l’influence de chacun des paramètres sur la déformation verticale en base de chaussée. Enfin, une équation permettant le calcul des déformations verticales est obtenue après calcul des coefficients normalisés de chaque paramètre. Une simplification de la formule est ensuite envisageable si le poids de certains paramètres est négligeable dans le calcul des déformations verticales. La seconde étape est indispensable pour calibrer et valider la formule obtenue par simulation. En effet, les déformations verticales obtenues sur le terrain sont comparées à celles données par la formule en y insérant les valeurs des paramètres du terrain. La simplification du modèle de départ par rapport à la réalité entraînant des erreurs, celles-ci peuvent être corrigées à cette étape. Il est ensuite intéressant de pouvoir obtenir des paramètres caractérisant les capacités structurales de la chaussée (durée de vie, nombre structural,…) en entrant simplement un bassin de déflexion obtenu avec un essai au FWD. Une page de calcul a été crée à cet effet.