antes voiture n velines -...
TRANSCRIPT
02/04/2009
Rapport, Projet GMP-2 | BOUZERZOUR, MAURICE, ROMITO, SIMOULIN
IUT MANTES
EN YVELINES
VOITURE
RC
Tuteuré
Par
Le CHEF de
Département
M. BROSSARD
Suspensions variables
IUT Mantes en Yvelines 7 rue Jean Hoët 78200 Mantes la Jolie Téléphone : 01 30 98 13 62 Télécopie : 01 30 98 16 96
Mantes en Yvelines

2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 1/62
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 2/62
Table des matières
1. Présentation ............................................................................................ 4
1.1. L’équipe ! ................................................................................................................................. 4
1.2. Les objectifs ............................................................................................................................. 4
1.3. Les parties mécaniques ciblées ............................................................................................... 4
1.4. L’innovation réalisée ............................................................................................................... 5
1.5. L’intérêt du projet ................................................................................................................... 5
1.6. Notre méthodologie ................................................................................................................ 6
1.7. Le choix du tuteur .................................................................................................................... 6
1.8. Ce rapport ................................................................................................................................ 6
2. Notre Cahier des charges .......................................................................... 7
2.1. Analyse fonctionnelle externe ................................................................................................. 7
2.2. Validation du besoin ................................................................................................................ 7
2.3. Recherche de l’environnement ............................................................................................... 8
2.4. Recherche des fonctions ......................................................................................................... 8
2.5. La caractérisation des fonctions de service............................................................................. 9
2.6. Hiérarchisation des fonctions ................................................................................................ 10
2.7. Pondération des fonctions : .................................................................................................. 11
2.8. Choix des technologies .......................................................................................................... 11
3. L’Etude & La Modélisation ....................................................................... 15
3.1. Une Conception virtuelle, Assistée par Ordinateur .............................................................. 15
3.2. Etude : Système d’ajustement de la garde au sol ................................................................. 22
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 3/62
3.3. Etude : Direction .................................................................................................................... 29
3.4. Etude : Transmission de puissance ........................................................................................ 33
4. Les Achats ............................................................................................... 35
4.1. Recensements ....................................................................................................................... 35
4.2. A la recherche de conseils pour faire un choix...................................................................... 35
4.3. Etude comparative : .............................................................................................................. 36
4.4. La commande de l’IUT ........................................................................................................... 37
4.5. Tests Concluants .................................................................................................................... 37
5. La Réalisation .......................................................................................... 38
5.1. La plasturgie .......................................................................................................................... 38
5.2. Fabrications mécaniques ....................................................................................................... 45
5.3. L’électronique ........................................................................................................................ 53
6. Critiques d’anticipation ........................................................................... 55
6.1. Recul sur la première moitié du projet (janvier 2009) .......................................................... 55
6.2. Objectif pour la deuxième moitié du projet .......................................................................... 55
6.3. Recul sur la deuxième moitié du projet ................................................................................ 55
7. Annexes .................................................................................................. 56
7.1. Exemples de programmes CN ............................................................................................... 56
7.2. Exemple de gamme d’usinage ............................................................................................... 58
7.3. Voiture finale ......................................................................................................................... 59
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 4/62
1. Présentation
1.1. L’équipe !
Avant toute chose, une présentation des membres s’impose :
Nous sommes quatre étudiants à l’IUT de Mantes en Yvelines, et nous préparons un DUT de Gé-
nie Mécanique et Productique :
M. BOUZERZOUR Abdel Hakim,
M. MAURICE Sébastien,
M. ROMITO Benoît,
M. SIMOULIN Xavier.
Nous avons formé cette équipe de 2ème année, car venant de filières et de milieux différents,
nous avons jugé que la différence nous permettrait de constituer un groupe équilibré et dynamique.
Ce fut un choix initial sans regret : nous avons pu travailler efficacement, avec ententes, concessions
et une profusion d’idées aussi variées qu’enrichissantes.
1.2. Les objectifs
Le présent rapport que vous lisez, est une synthèse du travail que nous avons réalisé pour la réa-
lisation de notre projet tuteuré universitaire au cours de notre seconde année d’étude en Génie Mé-
canique et Productique. Nous avons, par nous-mêmes, proposé ce projet avec comme objectif ini-
tiale :
Concevoir et fabriquer un prototype de véhicule radiocommandé
à la garde au sol ajustable.
1.3. Les parties mécaniques ciblées
Le thème du projet est, nous en avions conscience, vaste. En conséquence, nous avons particuliè-
rement ciblé la conception :
Du Châssis
De la direction
Des différentiels
Des articulations de suspensions
Et du système d’ajustement de la garde au sol
Il est évident que nous sommes restés dans un objectif de conception global et nous n’avons pas
négligé le reste du véhicule, mais nous avons privilégié ces cinq axes pour la suite. Nous nous
sommes inspirés par ailleurs, de différents modèles déjà existants, afin de nous aider à avancer et à
trouver des idées.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 5/62
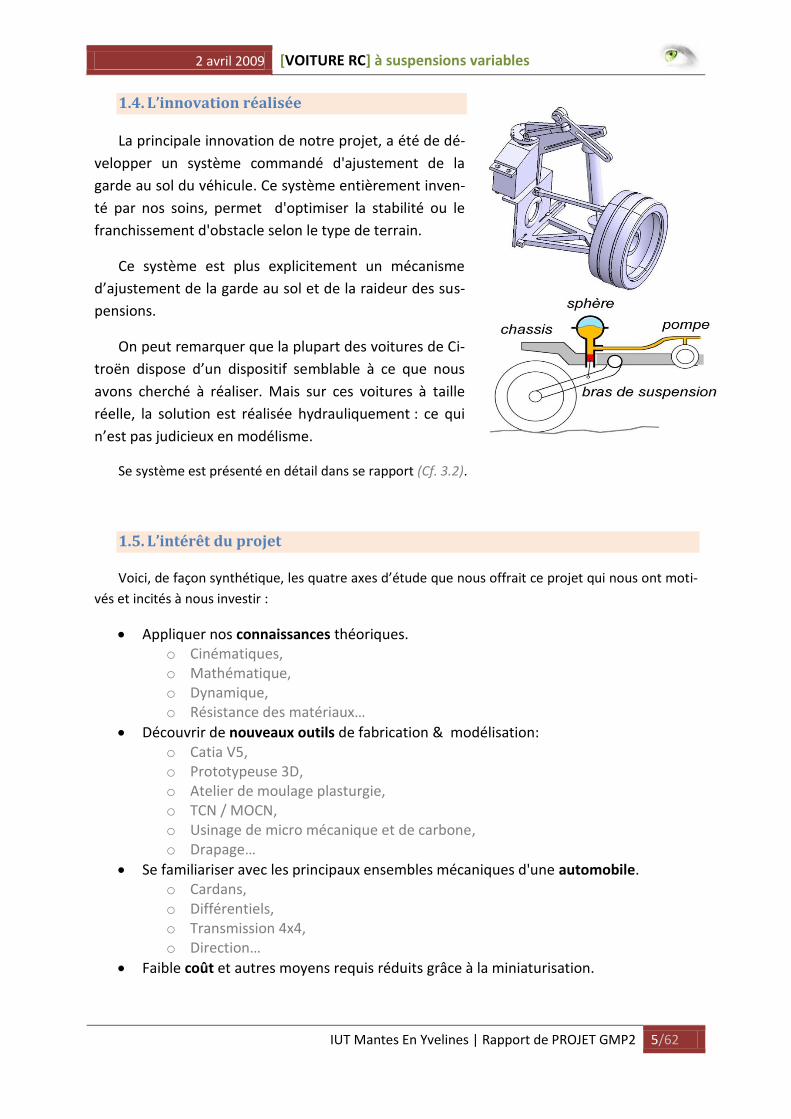
1.4. L’innovation réalisée
La principale innovation de notre projet, a été de dé-
velopper un système commandé d'ajustement de la
garde au sol du véhicule. Ce système entièrement inven-
té par nos soins, permet d'optimiser la stabilité ou le
franchissement d'obstacle selon le type de terrain.
Ce système est plus explicitement un mécanisme
d’ajustement de la garde au sol et de la raideur des sus-
pensions.
On peut remarquer que la plupart des voitures de Ci-
troën dispose d’un dispositif semblable à ce que nous
avons cherché à réaliser. Mais sur ces voitures à taille
réelle, la solution est réalisée hydrauliquement : ce qui
n’est pas judicieux en modélisme.
Se système est présenté en détail dans se rapport (Cf. 3.2).
1.5. L’intérêt du projet
Voici, de façon synthétique, les quatre axes d’étude que nous offrait ce projet qui nous ont moti-
vés et incités à nous investir :
Appliquer nos connaissances théoriques. o Cinématiques, o Mathématique, o Dynamique, o Résistance des matériaux…
Découvrir de nouveaux outils de fabrication & modélisation: o Catia V5, o Prototypeuse 3D, o Atelier de moulage plasturgie, o TCN / MOCN, o Usinage de micro mécanique et de carbone, o Drapage…
Se familiariser avec les principaux ensembles mécaniques d'une automobile. o Cardans, o Différentiels, o Transmission 4x4, o Direction…
Faible coût et autres moyens requis réduits grâce à la miniaturisation.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 6/62
1.6. Notre méthodologie
Pour mener à bien ce projet, il a fallu appliquer une méthodologie rigoureuse concernant :
La conception CAO (plus de 500 pièces modélisées à paramétrer et organiser),
La fabrication (de nombreux essais, et procédés multiples),
La répartition entre membres du groupe des parties mécaniques à élaborer.
Nous avons pour cela mis en place un système de gestion de donnés de travail régulièrement mises à jour sur un FTP privé et protégé. Cette bonne organisation a permis d’augmenter notre productivité, aussi bien par la possibilité de mener différents travaux en parallèle, que par le plaisir de travailler sur des fichiers organisés et structurés dès le départ.
Pour ce qui est de l’organisation de la fabrication, nous avons pu produire en parallèle sans devoir s’attendre mutuellement grâce à la diversité des procédés de production auxquels nous avons dû recourir (pliage, prototypage, moulage, usinage CN, conventionnel…). Notre projet, par son aspect exhaustif et sa relative courte durée s’est révélé dense : pour pouvoir espérer le voir arriver à terme, nous n’avons pas pu nous permettre d’attendre la fin de la CAO pour débuter la fabrication. Cependant chacune des opérations de la fabrication s’est appuyée sur des documents issus de la CAO (plans, fichiers STL…).
1.7. Le choix du tuteur
Le choix de notre tuteur n’a pas été fait au hasard, nous tenons à le préciser sur ce rapport:
Mr BROSSARD Cyril, est enseignant et chef du département GMP à l’IUT de Mantes. Mais sur-
tout, il est président d’un club de modélisme et nous a fait bénéficier de son expérience et de ses
connaissances dans le domaine (principalement pour l’étude de l’avant projet et la conception).
Nous le remercions donc pour les conseils qu’il nous a apportés tout au long de cette année.
1.8. Ce rapport
Ce rapport n’est qu’une synthèse du projet réalisé de GMP2. Cette synthèse ne relate donc que
la plus grosse partie du projet, il n’y apparait pas clairement tout se qui à été dessiné et produit.
De même, nous avons fait un choix réduit sur les explications formulées sur se rapport pour per-
mettre de montrer un maximum de se qui à été réalisé pour se projet. Un choix réduit qui est deve-
nue nécessaire face à la quantité d’informations qui ne pourrait tenir sur un simple rapport.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 7/62
2. Notre Cahier des charges
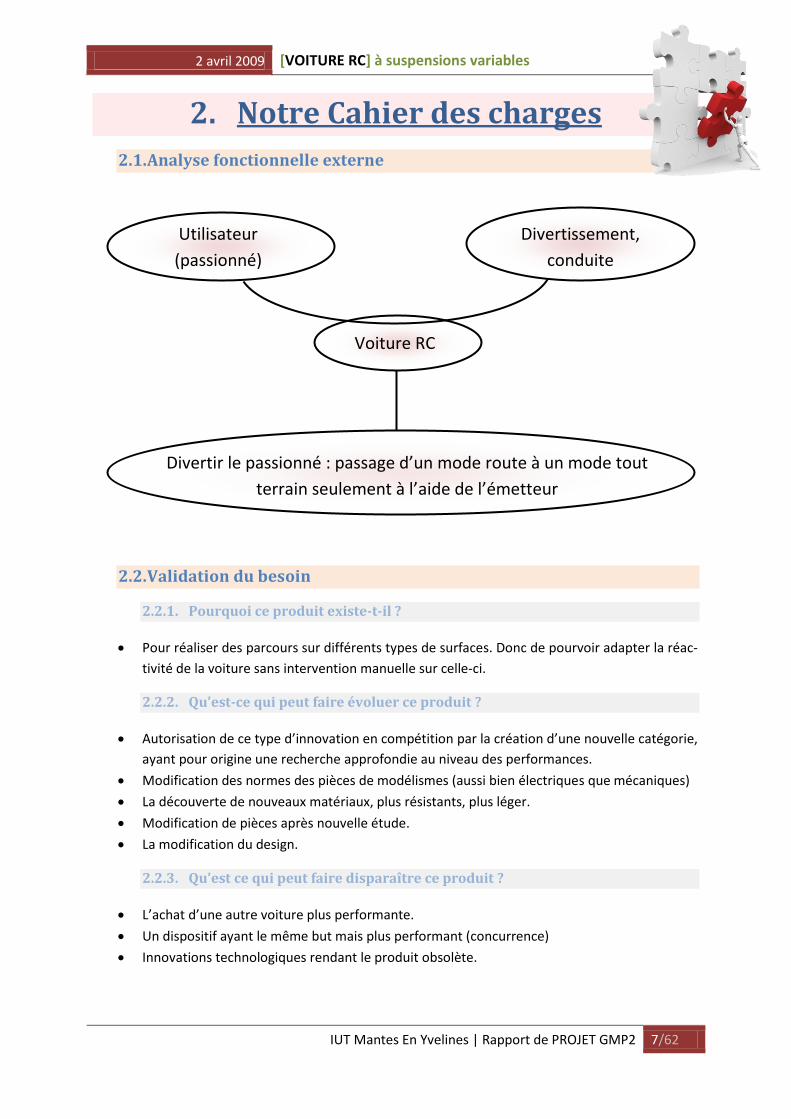
2.1. Analyse fonctionnelle externe
2.2. Validation du besoin
2.2.1. Pourquoi ce produit existe-t-il ?
Pour réaliser des parcours sur différents types de surfaces. Donc de pourvoir adapter la réac-
tivité de la voiture sans intervention manuelle sur celle-ci.
2.2.2. Qu’est-ce qui peut faire évoluer ce produit ?
Autorisation de ce type d’innovation en compétition par la création d’une nouvelle catégorie,
ayant pour origine une recherche approfondie au niveau des performances.
Modification des normes des pièces de modélismes (aussi bien électriques que mécaniques)
La découverte de nouveaux matériaux, plus résistants, plus léger.
Modification de pièces après nouvelle étude.
La modification du design.
2.2.3. Qu’est ce qui peut faire disparaître ce produit ?
L’achat d’une autre voiture plus performante.
Un dispositif ayant le même but mais plus performant (concurrence)
Innovations technologiques rendant le produit obsolète.
Utilisateur
(passionné)
Voiture RC
Divertissement,
conduite
Divertir le passionné : passage d’un mode route à un mode tout
terrain seulement à l’aide de l’émetteur
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 8/62
2.3. Recherche de l’environnement
2.3.1. Séquences d’utilisations et hors utilisations du produit
Séquence de maintenance / montage / démontage Réparation, mise au point, maintenance de la voiture.
Séquence utilisation Utilisation de la voiture.
Séquence hors utilisation, au repos Arrêt de la voiture
2.3.2. Les éléments de l’environnement en interactions directes pour chaque sé-
quences
Séquence maintenance / montage / démontage Outils, personne, voiture
Séquence Utilisation Sol (variable), utilisateur à l’aide de l’émetteur, air
Séquence hors utilisation Utilisateur, sol, environnement
2.4. Recherche des fonctions
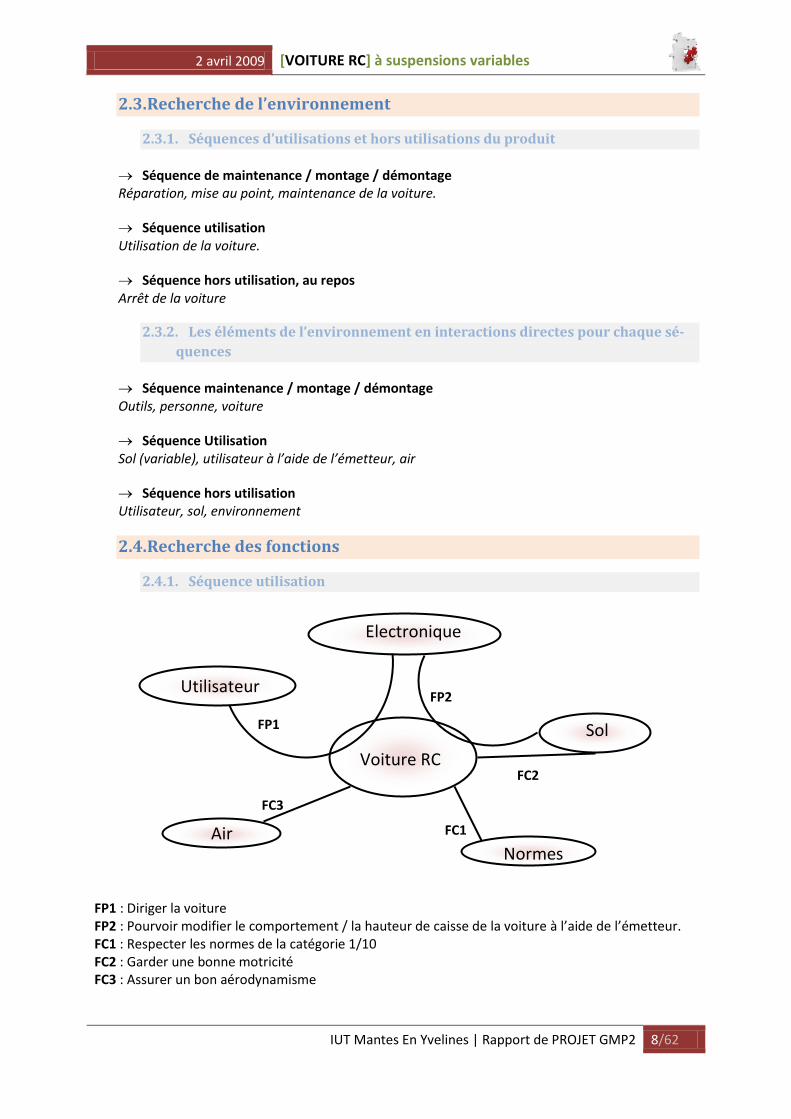
2.4.1. Séquence utilisation
FP1 : Diriger la voiture FP2 : Pourvoir modifier le comportement / la hauteur de caisse de la voiture à l’aide de l’émetteur. FC1 : Respecter les normes de la catégorie 1/10 FC2 : Garder une bonne motricité FC3 : Assurer un bon aérodynamisme
Voiture RC
Utilisateur
Electronique
Sol
Air Normes
FP1
FC1
FC3
FC2
FP2
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 9/62
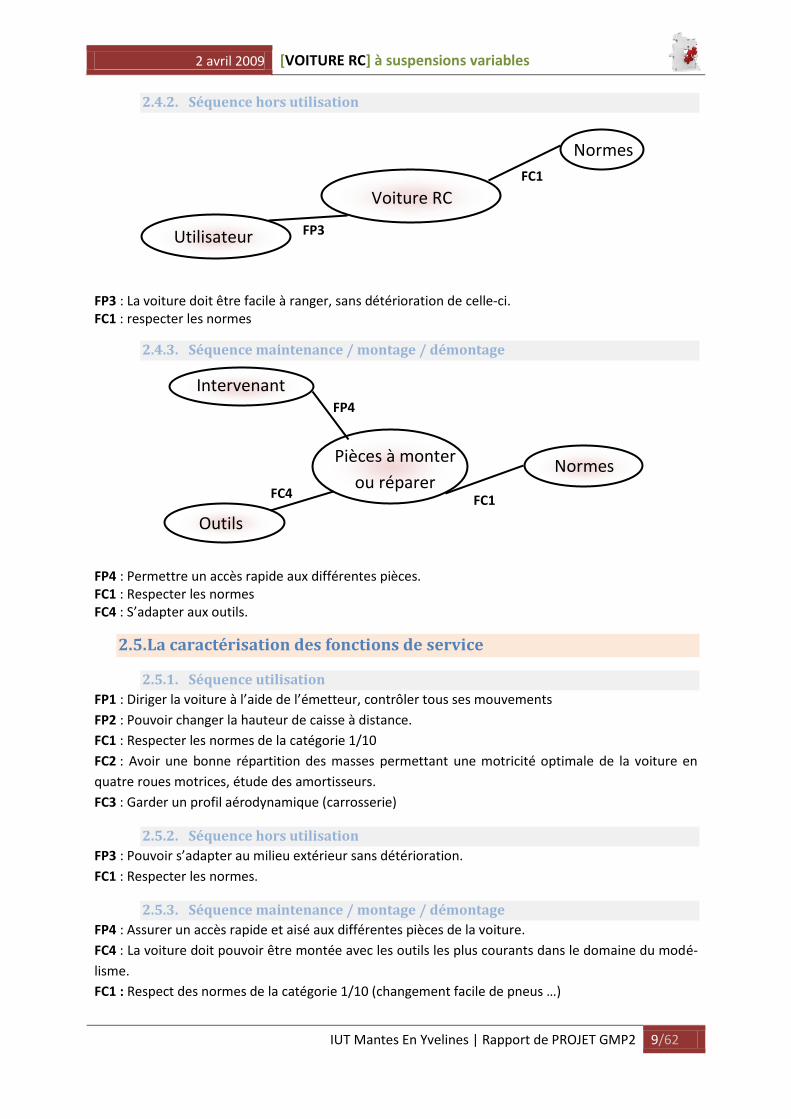
2.4.2. Séquence hors utilisation
FP3 : La voiture doit être facile à ranger, sans détérioration de celle-ci. FC1 : respecter les normes
2.4.3. Séquence maintenance / montage / démontage
FP4 : Permettre un accès rapide aux différentes pièces. FC1 : Respecter les normes FC4 : S’adapter aux outils.
2.5. La caractérisation des fonctions de service
2.5.1. Séquence utilisation
FP1 : Diriger la voiture à l’aide de l’émetteur, contrôler tous ses mouvements
FP2 : Pouvoir changer la hauteur de caisse à distance.
FC1 : Respecter les normes de la catégorie 1/10
FC2 : Avoir une bonne répartition des masses permettant une motricité optimale de la voiture en
quatre roues motrices, étude des amortisseurs.
FC3 : Garder un profil aérodynamique (carrosserie)
2.5.2. Séquence hors utilisation
FP3 : Pouvoir s’adapter au milieu extérieur sans détérioration.
FC1 : Respecter les normes.
2.5.3. Séquence maintenance / montage / démontage
FP4 : Assurer un accès rapide et aisé aux différentes pièces de la voiture.
FC4 : La voiture doit pouvoir être montée avec les outils les plus courants dans le domaine du modé-
lisme.
FC1 : Respect des normes de la catégorie 1/10 (changement facile de pneus …)
Pièces à monter
ou réparer
Intervenant
Outils
Normes
FC4 FC1
FP4
Voiture RC
Utilisateur
Normes
FP3
FC1
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 10/62
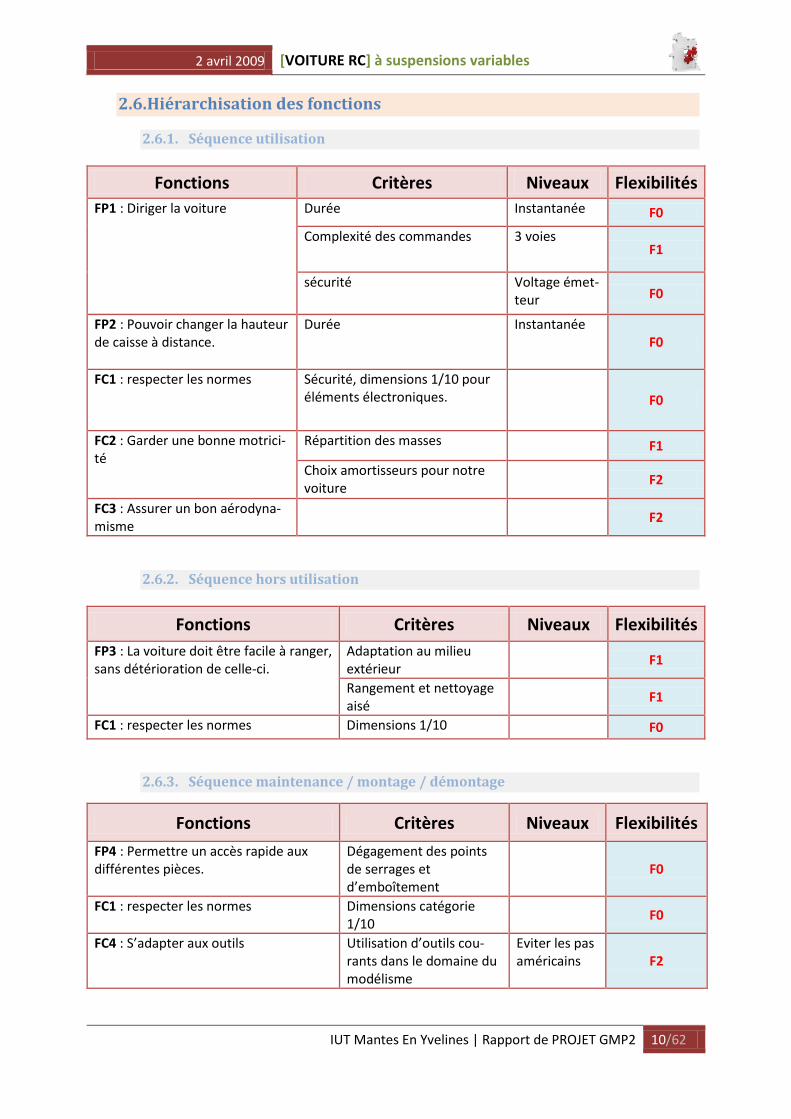
2.6. Hiérarchisation des fonctions
2.6.1. Séquence utilisation
Fonctions Critères Niveaux Flexibilités
FP1 : Diriger la voiture Durée Instantanée F0
Complexité des commandes 3 voies F1
sécurité Voltage émet-teur F0
FP2 : Pouvoir changer la hauteur de caisse à distance.
Durée Instantanée F0
FC1 : respecter les normes Sécurité, dimensions 1/10 pour éléments électroniques.
F0
FC2 : Garder une bonne motrici-té
Répartition des masses F1
Choix amortisseurs pour notre voiture
F2
FC3 : Assurer un bon aérodyna-misme
F2
2.6.2. Séquence hors utilisation
Fonctions Critères Niveaux Flexibilités
FP3 : La voiture doit être facile à ranger, sans détérioration de celle-ci.
Adaptation au milieu extérieur
F1
Rangement et nettoyage aisé
F1
FC1 : respecter les normes Dimensions 1/10 F0
2.6.3. Séquence maintenance / montage / démontage
Fonctions Critères Niveaux Flexibilités
FP4 : Permettre un accès rapide aux différentes pièces.
Dégagement des points de serrages et d’emboîtement
F0
FC1 : respecter les normes Dimensions catégorie 1/10
F0
FC4 : S’adapter aux outils Utilisation d’outils cou-rants dans le domaine du modélisme
Eviter les pas américains F2
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 11/62
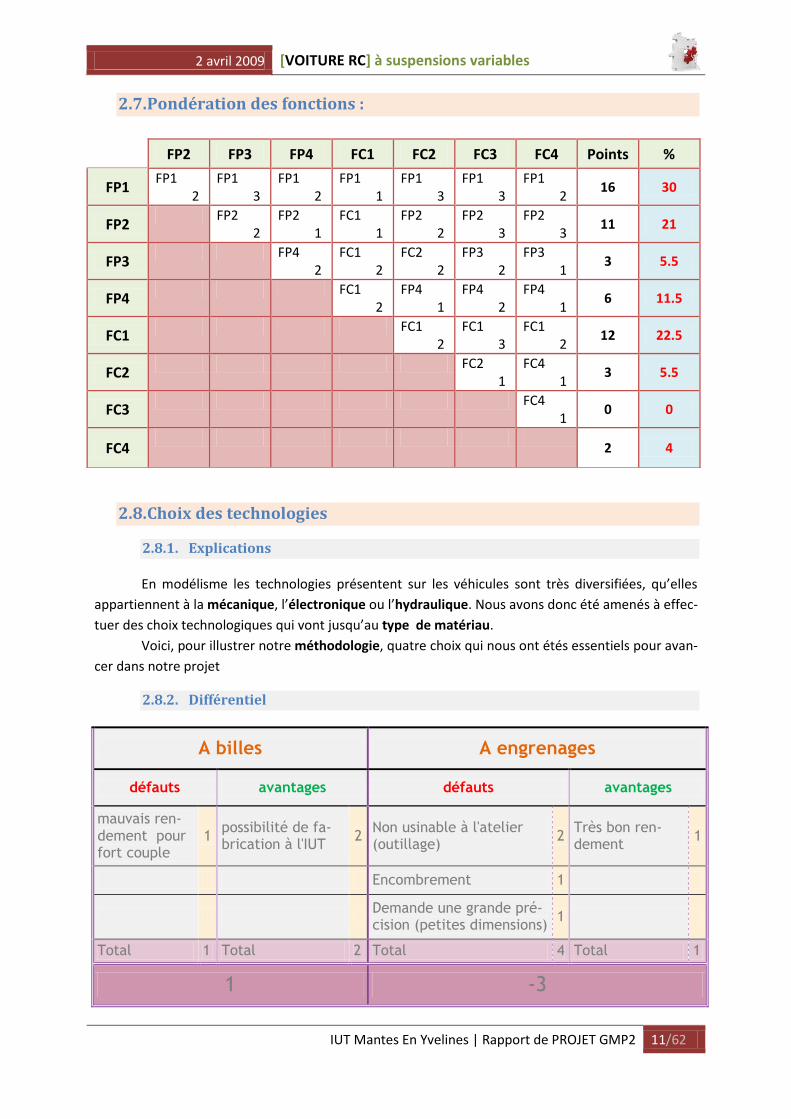
2.7. Pondération des fonctions :
2.8. Choix des technologies
2.8.1. Explications
En modélisme les technologies présentent sur les véhicules sont très diversifiées, qu’elles
appartiennent à la mécanique, l’électronique ou l’hydraulique. Nous avons donc été amenés à effec-
tuer des choix technologiques qui vont jusqu’au type de matériau.
Voici, pour illustrer notre méthodologie, quatre choix qui nous ont étés essentiels pour avan-
cer dans notre projet
2.8.2. Différentiel
A billes A engrenages
défauts avantages défauts avantages
mauvais ren-dement pour fort couple
1 possibilité de fa-brication à l'IUT
2 Non usinable à l'atelier (outillage)
2 Très bon ren-dement
1
Encombrement 1
Demande une grande pré-cision (petites dimensions)
1
Total 1 Total 2 Total 4 Total 1
1 -3
FP2 FP3 FP4 FC1 FC2 FC3 FC4 Points %
FP1 FP1 2
FP1 3
FP1 2
FP1 1
FP1 3
FP1 3
FP1 2
16 30
FP2 FP2
2 FP2 1
FC1 1
FP2 2
FP2 3
FP2 3
11 21
FP3 FP4
2 FC1 2
FC2 2
FP3 2
FP3 1
3 5.5
FP4 FC1
2 FP4 1
FP4 2
FP4 1
6 11.5
FC1 FC1
2 FC1 3
FC1 2
12 22.5
FC2 FC2
1 FC4 1
3 5.5
FC3 FC4
1 0 0
FC4
2 4
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 12/62
En privilégiant fortement la possibilité de les fabriquer nous même, et étant donné que nous
n’avons pas de fort couple en modélisme, Nous avons choisi une technolo-
gie de différentiels à billes.
Nous avons donc cherché à connaitre leurs fonctionnements et
nous les avons fabriqués avec les moyens que dispose l’IUT (Cf. 5.2.3. Diffé-
rentiels).
2.8.3. Motorisation
Thermique Electrique
défauts avantages défauts avantages
Nuisances sonore 2 Couple de sor-tie
2 Autonomie 2 Pas de système de freinage supplé-mentaire
2
Entretien impor-tant du moteur
1 Domaine pure-ment méca-nique
1 Encombrement batterie
2 Pas de boite de vitesses (variateur)
3
Coût sur la durée (essence, etc.)
3 Pour ceux qui aiment le bruit
0 Long chargement batterie
1 Simple à mettre en place
1
Essence spécial 1 poids de la bat-terie
2 Durée de vie 1
Pas de marche arrière
2 Faible entretien 1
rendement 1 Energie propre 1
demande un grand soin d'utilisation
1 rendement 1
Nombreux ré-glages moteur
1 autonomie 2
Total 12 Total 3 Total 7 Total 12
-9 5
Le choix du type de moteur a été une des premières questions phare que nous nous sommes
posés, car c’est le cœur de notre système.
Bien que la mécanique des moteurs thermiques (et boite
de vitesses) ait été très attirante pour notre projet, nous avons
préféré l’implantation d’un moteur électrique pour sa simplicité.
Cela nous à permis d’approfondir notre étude sur d’autres parties
mécaniques de la voiture, comme les différentiels, la direction, les
cardans…
L’achat du moteur (Cf. 4.Les Achats) nous a offert un
nombre considérable d’avantages recensés dans le tableau ci-
dessus).
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 13/62
2.8.4. Transmission
Courroie Synchrone plate Cardan
défauts avantages défauts avantages
Moyen rende-ment
1 Facilement adaptable avec différentiel à billes
1
Préférable pour les différentiels à engrenage
2 très bon rendement 1
durée de vie plus limitée
2 Facile à mettre en place
2 Difficile à concevoir
1 encombrement 2
Encombrement de l’élément de guidages
1 Amortissement des chocs
1
implication d’utilisation de pignons coniques
1 durée de vie limitée au système
1
Possibilité de décollement (ef-fet du "coin d'air")
1 Peu d'entretien, pas de lubrification
1 Transmission de plus fort couples
1
Moins chère 1
Silencieux 0
Rendement au mini-mum à 95%
1
Variations d'entraxe possible
1
Total 5 Total 8 Total 4 Total 5
3 1
Avec le choix du moteur électrique et des différentiels à
billes, nous avons la solution de transmission par lien flexible qui
reste la plus avantageuse.
La courroie synchrone offre une transmission sans glis-
sement simple à mettre en place, avec une tension de courroie
non excessive.
Notre voiture ayant 4 roues motrices, l’entraxe entre les deux trains est long, ce qui nous
oblige à utiliser d’autres moyens de transmission que par engrenage.
Nous avons également exclu très rapidement la solution par chaine, car beaucoup trop
lourd, avec d’importantes vibrations et une inertie non adaptée au modélisme.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 14/62
2.8.5. Châssis
En aluminium En Carbone
défauts avantages défauts avantages
Plus lourd que le Carbone
2 Peu coûteux 1 Cher 1 Très léger 3
Moins résistant pour une plus faible épaisseur
2 Facile à usiner 2 Possibilité de collage
Possibilité de soudure 2 Ne peut pas être soudé
1 Forte résistance mécanique
2
Matériaux isotrope: résistance mécanique homogène
2 limitation à une forme 2D
2 Ne transmet pas la chaleur
2
possibilité de mise en forme
2 isolant électrique 2
Quasi-isotrope (tressé)
1
Total 4 Total 9 Total 4 Total 10
5 6
Bien que notre voiture reste un prototype, et que
les hautes performances du carbone ne soient pas vitales
à notre projet, nous avons eu le privilège d’obtenir (par
EADS) deux plaques de fibres de carbone tressés servant
dans l’aéronautique.
Nous avons donc tiré profit de ces deux plaques
et avons usiné un grand nombre des pièces de notre
voiture dont le châssis qui est totalement en carbone (Cf.
5.2.5 Structure principale).
Les deux millimètres d’épaisseur de ces plaques nous offrent une importante rigidité pour
un poids de la voiture très réduit.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 15/62
3. L’Etude & La Modélisation
3.1. Une Conception virtuelle, Assistée par Ordinateur
3.1.1. Quelques mois pour découvrir une partie de CATIA V5
Le projet a commencé alors que nous ne connaissions pas CATIA. Nous avons
donc dû nous pencher sur les ateliers de ce nouveau logiciel bien moins intuitif et
ergonomique que le logiciel Inventor sur lequel nous avions été formés en première
année de notre DUT.
Une deuxième grosse difficulté à laquelle nous avons été confrontés fut la gestion des données
numériques, devenant de plus en plus nombreuses stockées sur notre FTP (Une centaine de pièces
pour un assemblage). Nous avons donc effectué un archivage au fur-et-à-mesure de l’avancement,
en essayant de paramétrer un maximum de pièces sur CATIA. Ces paramètres nous ont permis
d’avoir une modélisation très flexible.
Ainsi, par notre projet, nous avons tous accumulé un certain nombre de connaissances dans cha-
cun des ateliers suivants :
Part Design : pour dessiner toutes les pièces mécaniques,
Assembly Design : pour assembler l’ensemble de la voiture dans un « Product »,
Sketch Tracer : Pour dessiner une pièce avec l’appui d’un croquis scanné,
FreeStyle : pour effectuer du surfacique libre: en particulier pour la carrosserie,
Imagine & Shape : pour effectuer du surfacique simple et rapidement,
DMU Kinematics : pour simuler la cinématique des différents degrés de liberté du « Pro-
duct » de notre voiture, et faire des animations,
Photo Studio : pour appliquer des rendus réalistes,
Generative Shape Design : Pour faire le ressort et faire du surfacique,
Generative Structural Analysis : pour nous aider dans le dimensionnement des struc-
tures.
3.1.2. Conception Mécanique Paramétrée
Nous avons modélisé la totalité de la voiture, sous plusieurs configurations différentes, en
comptant au final presque 200 pièces par configuration. Sans compter les versions parallèles, notre
voiture existe en plus de 15 versions. La gestion de ces fichiers s’est révélée ardue, nous avons alors
recourut à un stockage FTP sur Internet pour que chaque correction apportée soit accessible en
temps réel par tous les membres du groupe.
Mis à part, les difficultés habituelles de la modélisation, nous avons paramétré la plupart des
pièces essentielles de la voiture comme expliqué plus loin dans le rapport. Malgré le travail supplé-
mentaire que demande la mise en place de tels paramètres, ils nous ont été très utiles pour effectuer
de nombreux réglages rapides et sans erreur.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 16/62
Nous sommes donc arrivés au final, à une voiture complète et très flexible :
Voici trois exemples de paramétrages effectués sur des pièces clés:
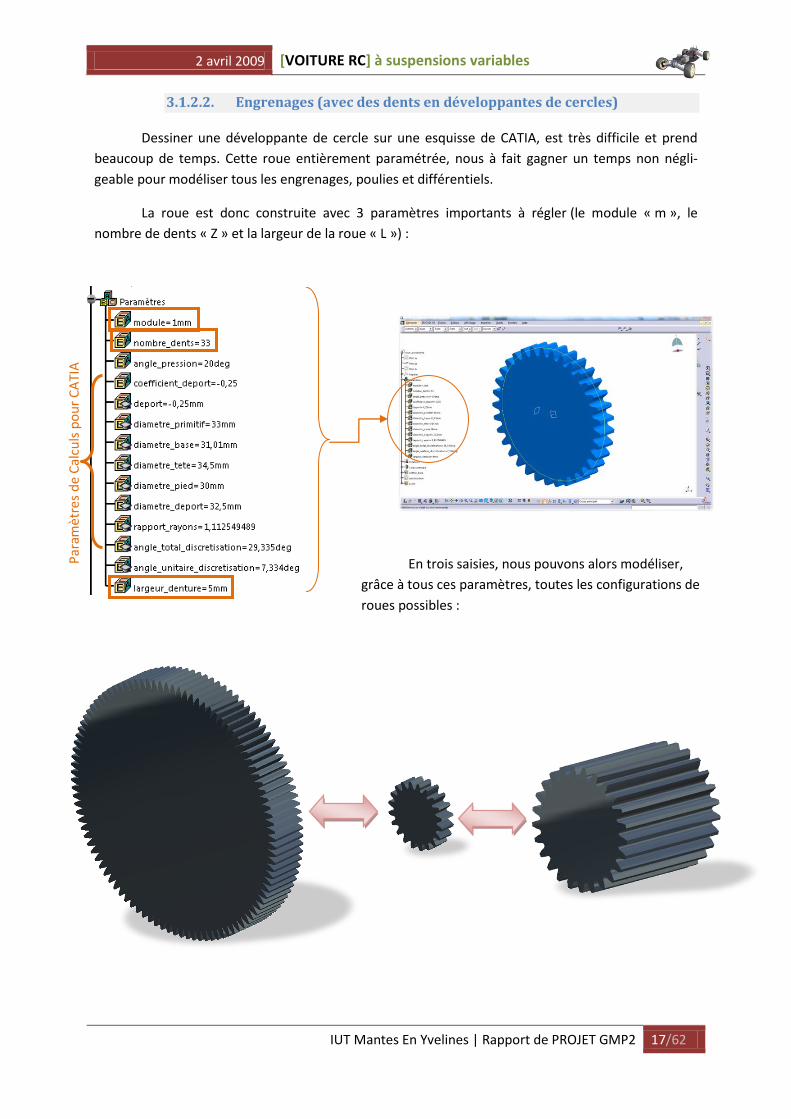
3.1.2.1. Triangles de suspension
Pour changer rapidement, la largeur de voie du véhicule ou bien la rigidité des triangles, il est
évident que ces pièces doivent êtres les plus flexibles possibles. Nous avons donc placé 7 paramètres
essentiels sur cette pièce, permettant la modification directe :
Pour avoir une idée de l’avantage qu’offre ce paramétrage, voici un petit aperçu de ce que
nous pouvons changer sur notre pièce en deux « clics » :
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 17/62
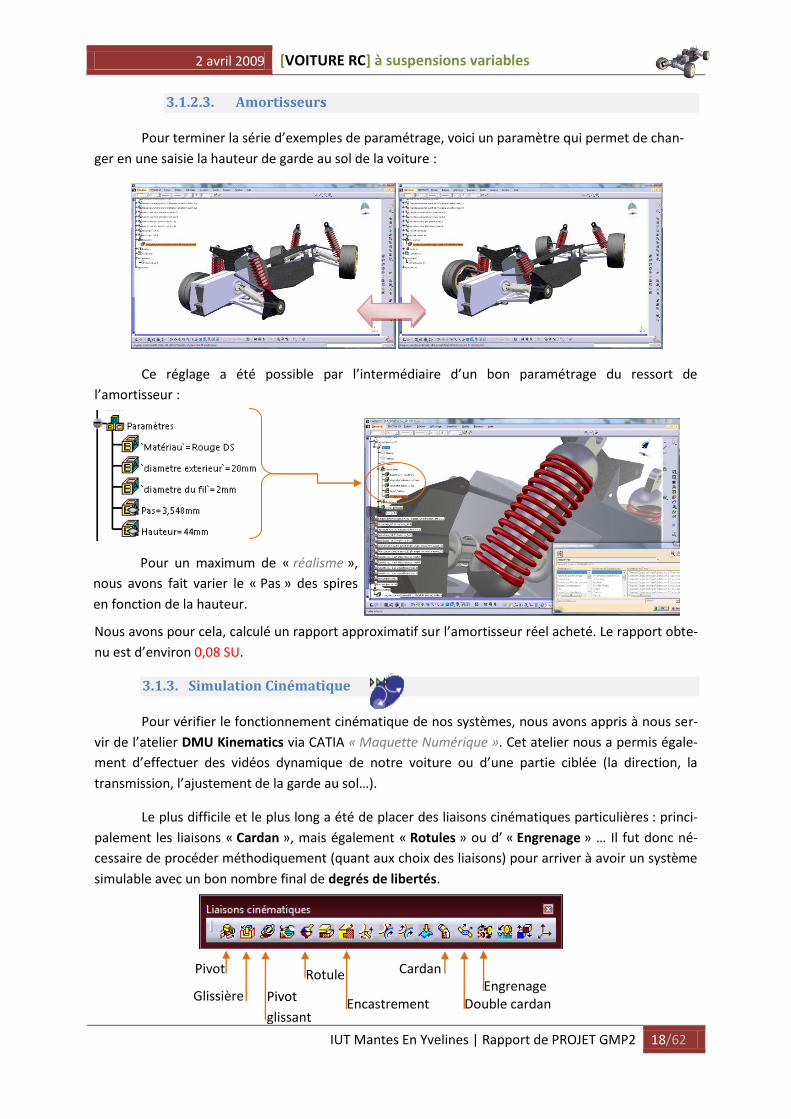
3.1.2.2. Engrenages (avec des dents en développantes de cercles)
Dessiner une développante de cercle sur une esquisse de CATIA, est très difficile et prend
beaucoup de temps. Cette roue entièrement paramétrée, nous à fait gagner un temps non négli-
geable pour modéliser tous les engrenages, poulies et différentiels.
La roue est donc construite avec 3 paramètres importants à régler (le module « m », le
nombre de dents « Z » et la largeur de la roue « L ») :
Par
amèt
res
de
Cal
culs
po
ur
CA
TIA
En trois saisies, nous pouvons alors modéliser,
grâce à tous ces paramètres, toutes les configurations de
roues possibles :
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 18/62
3.1.2.3. Amortisseurs
Pour terminer la série d’exemples de paramétrage, voici un paramètre qui permet de chan-
ger en une saisie la hauteur de garde au sol de la voiture :
Ce réglage a été possible par l’intermédiaire d’un bon paramétrage du ressort de
l’amortisseur :
Nous avons pour cela, calculé un rapport approximatif sur l’amortisseur réel acheté. Le rapport obte-
nu est d’environ 0,08 SU.
3.1.3. Simulation Cinématique
Pour vérifier le fonctionnement cinématique de nos systèmes, nous avons appris à nous ser-
vir de l’atelier DMU Kinematics via CATIA « Maquette Numérique ». Cet atelier nous a permis égale-
ment d’effectuer des vidéos dynamique de notre voiture ou d’une partie ciblée (la direction, la
transmission, l’ajustement de la garde au sol…).
Le plus difficile et le plus long a été de placer des liaisons cinématiques particulières : princi-
palement les liaisons « Cardan », mais également « Rotules » ou d’ « Engrenage » … Il fut donc né-
cessaire de procéder méthodiquement (quant aux choix des liaisons) pour arriver à avoir un système
simulable avec un bon nombre final de degrés de libertés.
Pour un maximum de « réalisme »,
nous avons fait varier le « Pas » des spires
en fonction de la hauteur.
Pivot
Glissière Pivot
glissant
Rotule
Encastrement
Cardan
Double cardan Engrenage
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 19/62
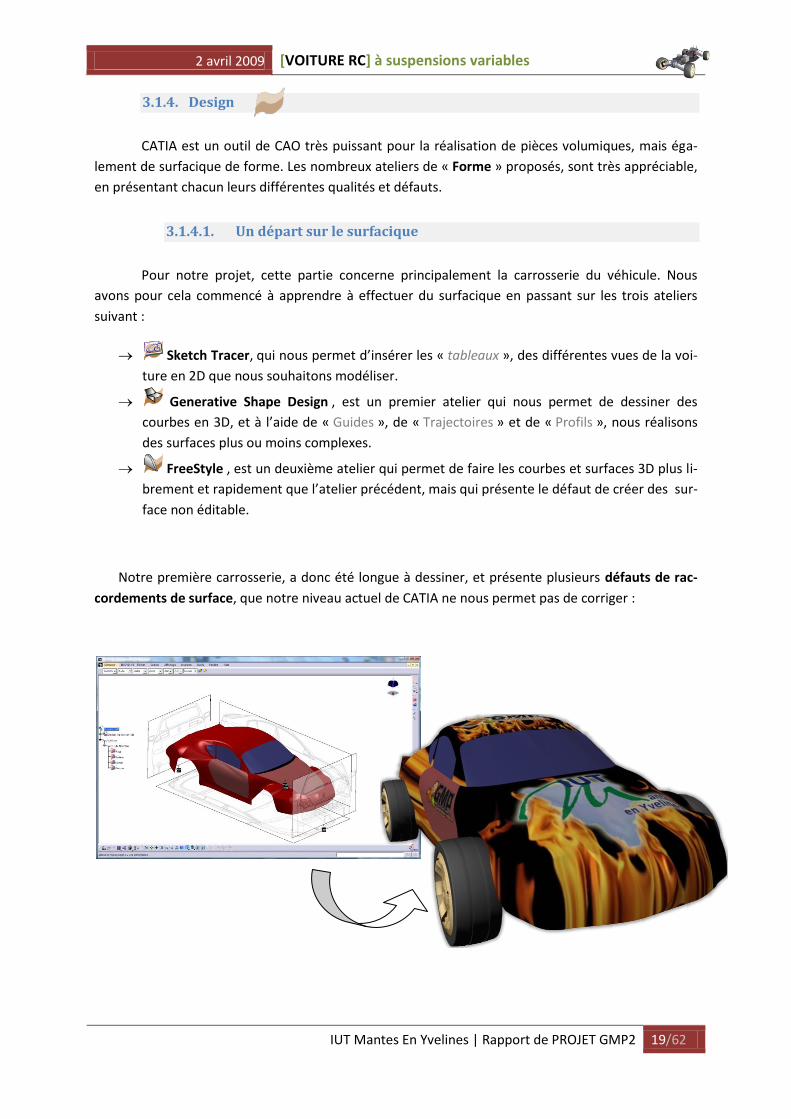
3.1.4. Design
CATIA est un outil de CAO très puissant pour la réalisation de pièces volumiques, mais éga-
lement de surfacique de forme. Les nombreux ateliers de « Forme » proposés, sont très appréciable,
en présentant chacun leurs différentes qualités et défauts.
3.1.4.1. Un départ sur le surfacique
Pour notre projet, cette partie concerne principalement la carrosserie du véhicule. Nous
avons pour cela commencé à apprendre à effectuer du surfacique en passant sur les trois ateliers
suivant :
Sketch Tracer, qui nous permet d’insérer les « tableaux », des différentes vues de la voi-
ture en 2D que nous souhaitons modéliser.
Generative Shape Design , est un premier atelier qui nous permet de dessiner des
courbes en 3D, et à l’aide de « Guides », de « Trajectoires » et de « Profils », nous réalisons
des surfaces plus ou moins complexes.
FreeStyle , est un deuxième atelier qui permet de faire les courbes et surfaces 3D plus li-
brement et rapidement que l’atelier précédent, mais qui présente le défaut de créer des sur-
face non éditable.
Notre première carrosserie, a donc été longue à dessiner, et présente plusieurs défauts de rac-
cordements de surface, que notre niveau actuel de CATIA ne nous permet pas de corriger :
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 20/62
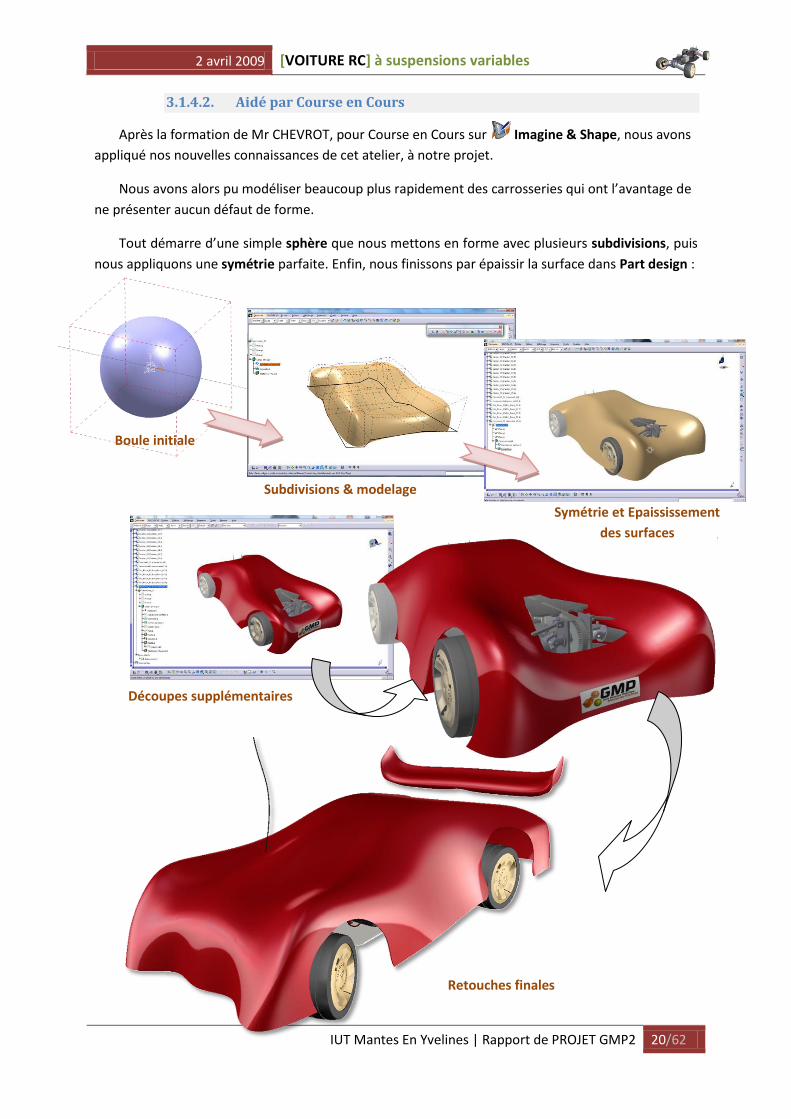
3.1.4.2. Aidé par Course en Cours
Après la formation de Mr CHEVROT, pour Course en Cours sur Imagine & Shape, nous avons
appliqué nos nouvelles connaissances de cet atelier, à notre projet.
Nous avons alors pu modéliser beaucoup plus rapidement des carrosseries qui ont l’avantage de
ne présenter aucun défaut de forme.
Tout démarre d’une simple sphère que nous mettons en forme avec plusieurs subdivisions, puis
nous appliquons une symétrie parfaite. Enfin, nous finissons par épaissir la surface dans Part design :
Boule initiale
Subdivisions & modelage
Symétrie et Epaississement
des surfaces
Retouches finales
Découpes supplémentaires

2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 21/62
3.1.5. Rendus réalistes
Toute la CAO a été dessinée sur la version R17 de CATIA. Pour la plupart des rendus, nous
sommes passés sur la R18, offrant
d’amples possibilités, et surtout une rapi-
dité de prise en main.
Le rendu réaliste commence dans
tous les cas, sur l’atelier Photo Studio de
CATIA. Mais nous sommes également allés
légèrement plus loin avec un logiciel de
graphisme :
Nous utilisons Fireworks d’Adobe.
Ce logiciel nous permet de mettre
d’amples effets sur les images en sortie de CATIA :
Nous avons également
modélisé toutes les pièces de la voiture de façon les
plus réalistes pos-
sibles : étiquettes, fil
électriques, écrous
textures… Voici un
exemple concret de
modélisation du varia-
teur et du récepteur
radio:
L’image en sortie de CATIA
La même image, après mo-
dification sous Fireworks
+
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 22/62
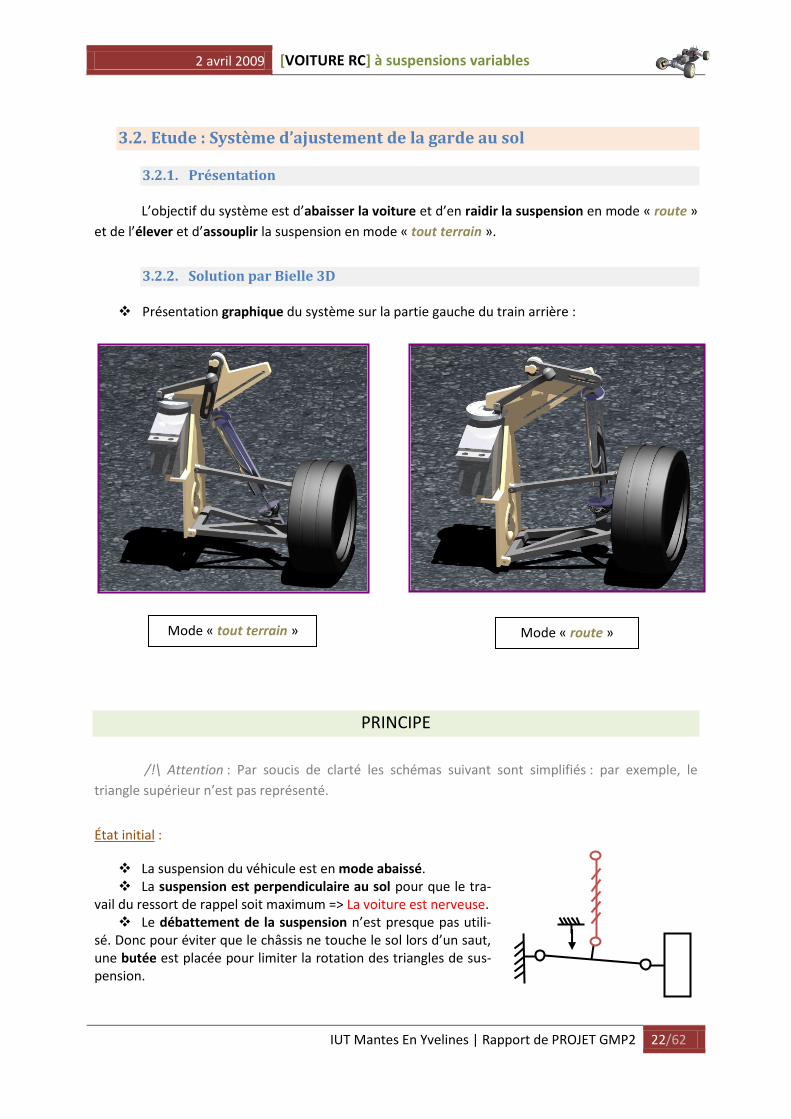
3.2. Etude : Système d’ajustement de la garde au sol
3.2.1. Présentation
L’objectif du système est d’abaisser la voiture et d’en raidir la suspension en mode « route »
et de l’élever et d’assouplir la suspension en mode « tout terrain ».
3.2.2. Solution par Bielle 3D
Présentation graphique du système sur la partie gauche du train arrière :
PRINCIPE
/!\ Attention : Par soucis de clarté les schémas suivant sont simplifiés : par exemple, le
triangle supérieur n’est pas représenté.
État initial :
La suspension du véhicule est en mode abaissé. La suspension est perpendiculaire au sol pour que le tra-
vail du ressort de rappel soit maximum => La voiture est nerveuse. Le débattement de la suspension n’est presque pas utili-
sé. Donc pour éviter que le châssis ne touche le sol lors d’un saut, une butée est placée pour limiter la rotation des triangles de sus-pension.
Mode « tout terrain » Mode « route »
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 23/62
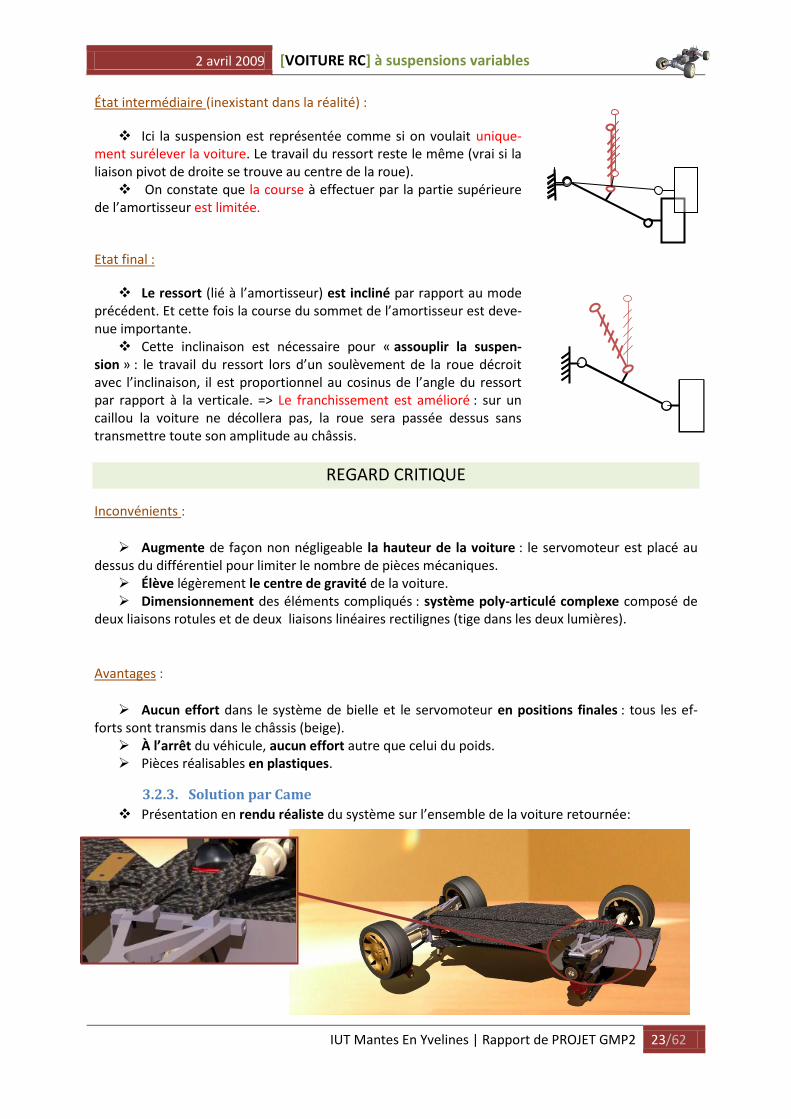
État intermédiaire (inexistant dans la réalité) :
Ici la suspension est représentée comme si on voulait unique-ment surélever la voiture. Le travail du ressort reste le même (vrai si la liaison pivot de droite se trouve au centre de la roue). On constate que la course à effectuer par la partie supérieure
de l’amortisseur est limitée.
Etat final :
Le ressort (lié à l’amortisseur) est incliné par rapport au mode précédent. Et cette fois la course du sommet de l’amortisseur est deve-nue importante. Cette inclinaison est nécessaire pour « assouplir la suspen-
sion » : le travail du ressort lors d’un soulèvement de la roue décroit avec l’inclinaison, il est proportionnel au cosinus de l’angle du ressort par rapport à la verticale. => Le franchissement est amélioré : sur un caillou la voiture ne décollera pas, la roue sera passée dessus sans transmettre toute son amplitude au châssis.
REGARD CRITIQUE
Inconvénients :
Augmente de façon non négligeable la hauteur de la voiture : le servomoteur est placé au dessus du différentiel pour limiter le nombre de pièces mécaniques. Élève légèrement le centre de gravité de la voiture. Dimensionnement des éléments compliqués : système poly-articulé complexe composé de
deux liaisons rotules et de deux liaisons linéaires rectilignes (tige dans les deux lumières).
Avantages :
Aucun effort dans le système de bielle et le servomoteur en positions finales : tous les ef-forts sont transmis dans le châssis (beige). À l’arrêt du véhicule, aucun effort autre que celui du poids. Pièces réalisables en plastiques.
3.2.3. Solution par Came
Présentation en rendu réaliste du système sur l’ensemble de la voiture retournée:
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 24/62
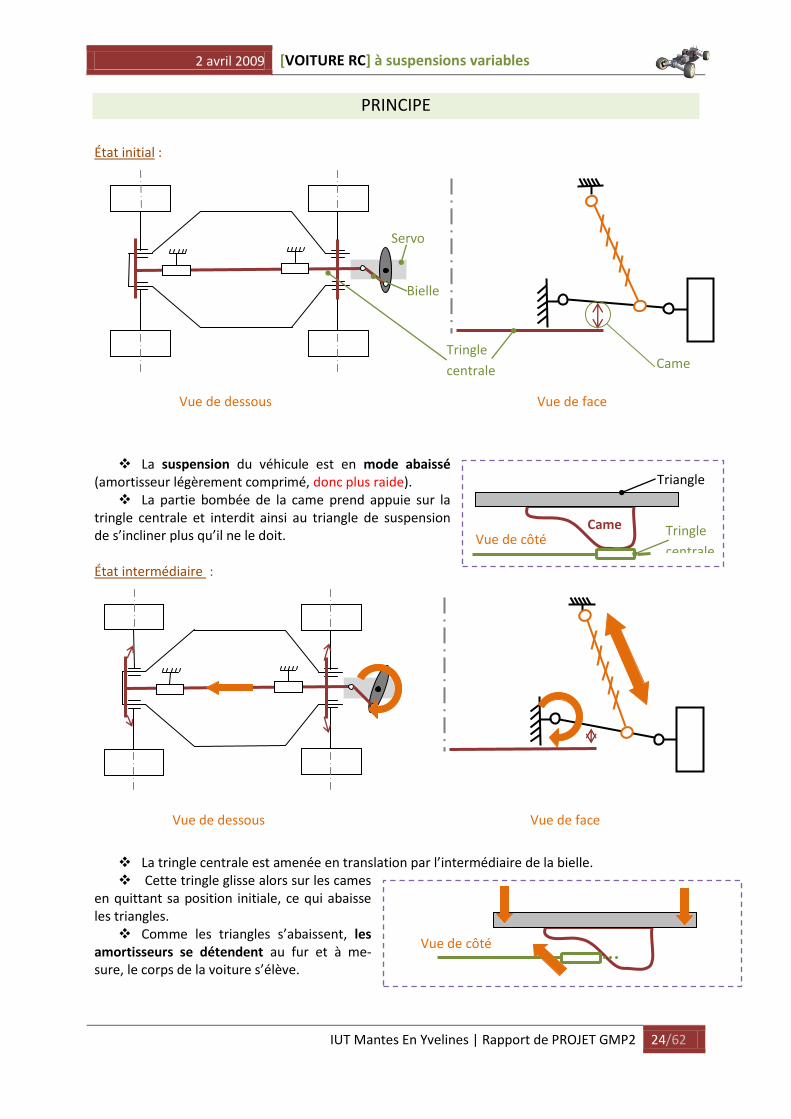
Came Tringle
centrale Vue de côté
Triangle
PRINCIPE
État initial :
La suspension du véhicule est en mode abaissé (amortisseur légèrement comprimé, donc plus raide). La partie bombée de la came prend appuie sur la
tringle centrale et interdit ainsi au triangle de suspension de s’incliner plus qu’il ne le doit.
État intermédiaire :
La tringle centrale est amenée en translation par l’intermédiaire de la bielle. Cette tringle glisse alors sur les cames
en quittant sa position initiale, ce qui abaisse les triangles. Comme les triangles s’abaissent, les
amortisseurs se détendent au fur et à me-sure, le corps de la voiture s’élève.
Came Tringle
centrale
Servo
Bielle
Vue de dessous Vue de face
Vue de dessous Vue de face
Vue de côté
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 25/62
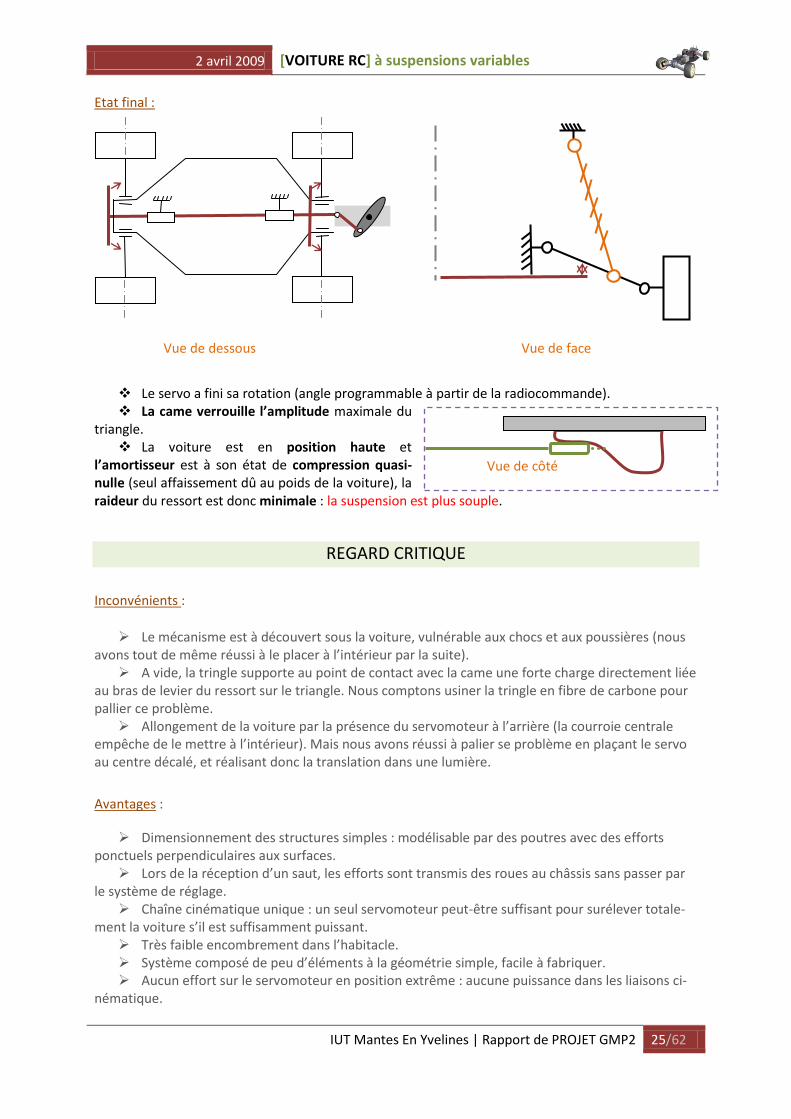
Etat final :
Le servo a fini sa rotation (angle programmable à partir de la radiocommande). La came verrouille l’amplitude maximale du
triangle. La voiture est en position haute et
l’amortisseur est à son état de compression quasi-nulle (seul affaissement dû au poids de la voiture), la raideur du ressort est donc minimale : la suspension est plus souple.
REGARD CRITIQUE
Inconvénients :
Le mécanisme est à découvert sous la voiture, vulnérable aux chocs et aux poussières (nous avons tout de même réussi à le placer à l’intérieur par la suite). A vide, la tringle supporte au point de contact avec la came une forte charge directement liée
au bras de levier du ressort sur le triangle. Nous comptons usiner la tringle en fibre de carbone pour pallier ce problème. Allongement de la voiture par la présence du servomoteur à l’arrière (la courroie centrale
empêche de le mettre à l’intérieur). Mais nous avons réussi à palier se problème en plaçant le servo au centre décalé, et réalisant donc la translation dans une lumière.
Avantages :
Dimensionnement des structures simples : modélisable par des poutres avec des efforts ponctuels perpendiculaires aux surfaces. Lors de la réception d’un saut, les efforts sont transmis des roues au châssis sans passer par
le système de réglage. Chaîne cinématique unique : un seul servomoteur peut-être suffisant pour surélever totale-
ment la voiture s’il est suffisamment puissant. Très faible encombrement dans l’habitacle. Système composé de peu d’éléments à la géométrie simple, facile à fabriquer. Aucun effort sur le servomoteur en position extrême : aucune puissance dans les liaisons ci-
nématique.
Vue de dessous Vue de face
Vue de côté
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 26/62
3.2.4. Choix et développement.
Suite à une réunion avec notre tuteur (M. BROSSARD Cyril), nous avons fait le choix d’adopter la
solution par Came. L’argument qui détermina notre choix est la faible modification de la géométrie
globale qu’entraîne cette solution par rapport à la première, ce qui limite les risques pris et facilite la
réalisation de la fonction.
Transmission :
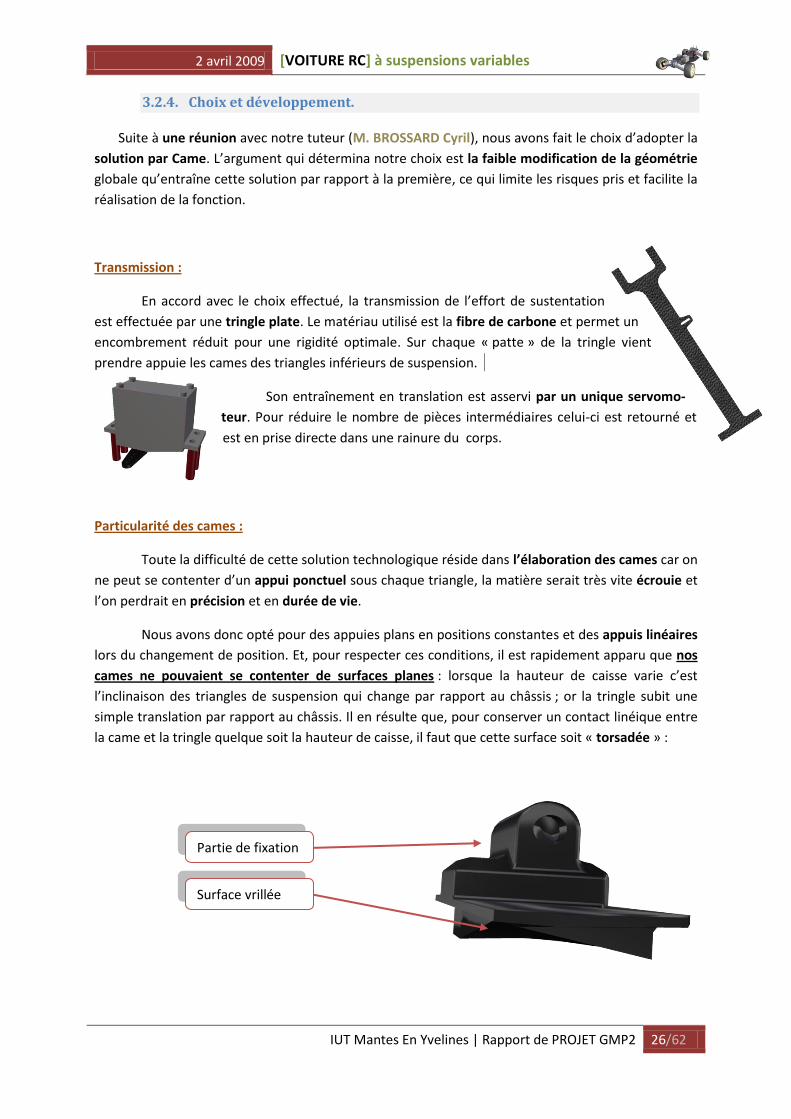
En accord avec le choix effectué, la transmission de l’effort de sustentation
est effectuée par une tringle plate. Le matériau utilisé est la fibre de carbone et permet un
encombrement réduit pour une rigidité optimale. Sur chaque « patte » de la tringle vient
prendre appuie les cames des triangles inférieurs de suspension. C
Son entraînement en translation est asservi par un unique servomo-
teur. Pour réduire le nombre de pièces intermédiaires celui-ci est retourné et
est en prise directe dans une rainure du corps.
Particularité des cames :
Toute la difficulté de cette solution technologique réside dans l’élaboration des cames car on
ne peut se contenter d’un appui ponctuel sous chaque triangle, la matière serait très vite écrouie et
l’on perdrait en précision et en durée de vie.
Nous avons donc opté pour des appuies plans en positions constantes et des appuis linéaires
lors du changement de position. Et, pour respecter ces conditions, il est rapidement apparu que nos
cames ne pouvaient se contenter de surfaces planes : lorsque la hauteur de caisse varie c’est
l’inclinaison des triangles de suspension qui change par rapport au châssis ; or la tringle subit une
simple translation par rapport au châssis. Il en résulte que, pour conserver un contact linéique entre
la came et la tringle quelque soit la hauteur de caisse, il faut que cette surface soit « torsadée » :
Surface vrillée
Partie de fixation
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 27/62
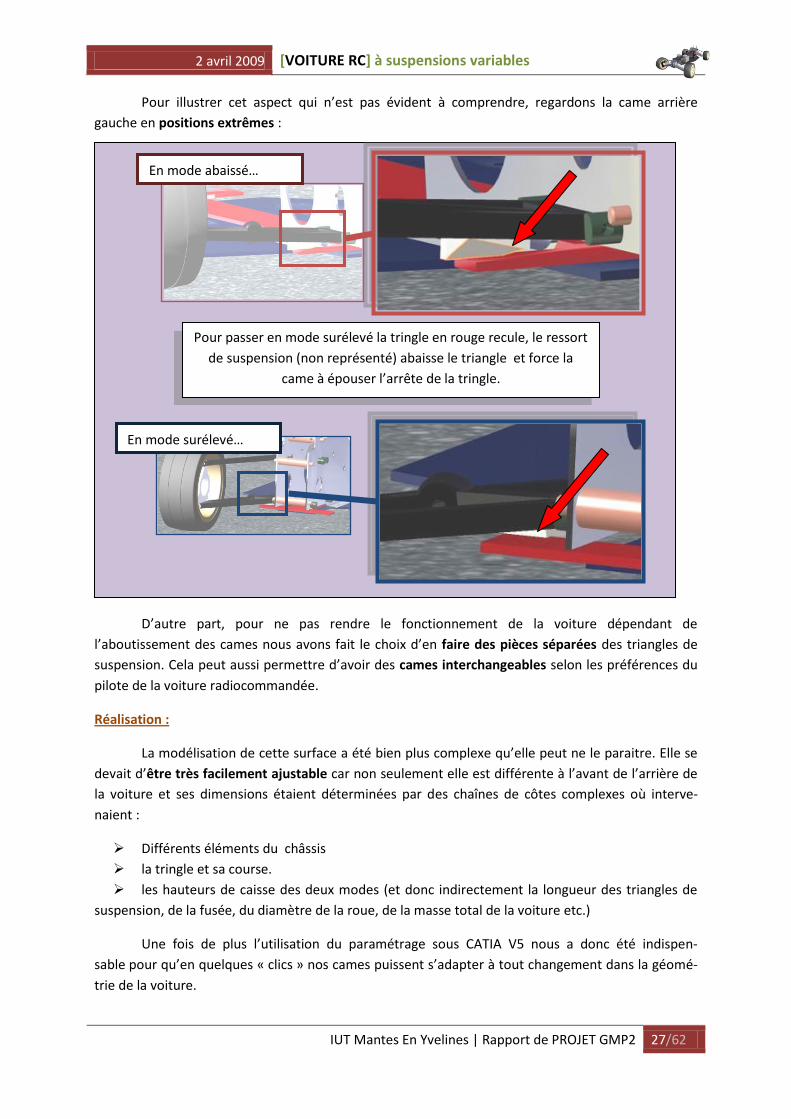
Pour illustrer cet aspect qui n’est pas évident à comprendre, regardons la came arrière
gauche en positions extrêmes :
D’autre part, pour ne pas rendre le fonctionnement de la voiture dépendant de
l’aboutissement des cames nous avons fait le choix d’en faire des pièces séparées des triangles de
suspension. Cela peut aussi permettre d’avoir des cames interchangeables selon les préférences du
pilote de la voiture radiocommandée.
Réalisation :
La modélisation de cette surface a été bien plus complexe qu’elle peut ne le paraitre. Elle se
devait d’être très facilement ajustable car non seulement elle est différente à l’avant de l’arrière de
la voiture et ses dimensions étaient déterminées par des chaînes de côtes complexes où interve-
naient :
Différents éléments du châssis
la tringle et sa course.
les hauteurs de caisse des deux modes (et donc indirectement la longueur des triangles de
suspension, de la fusée, du diamètre de la roue, de la masse total de la voiture etc.)
Une fois de plus l’utilisation du paramétrage sous CATIA V5 nous a donc été indispen-
sable pour qu’en quelques « clics » nos cames puissent s’adapter à tout changement dans la géomé-
trie de la voiture.
En mode abaissé…
En mode surélevé…
Pour passer en mode surélevé la tringle en rouge recule, le ressort
de suspension (non représenté) abaisse le triangle et force la
came à épouser l’arrête de la tringle.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 28/62
Ensuite, il nous a fallut utiliser un atelier de Catia que nous n’avions pas étudié en cours : Frees-
tyle. Celui-ci permet, contrairement à Part design de créer des surfaces complexes, comme celle
dont nous avions besoin.
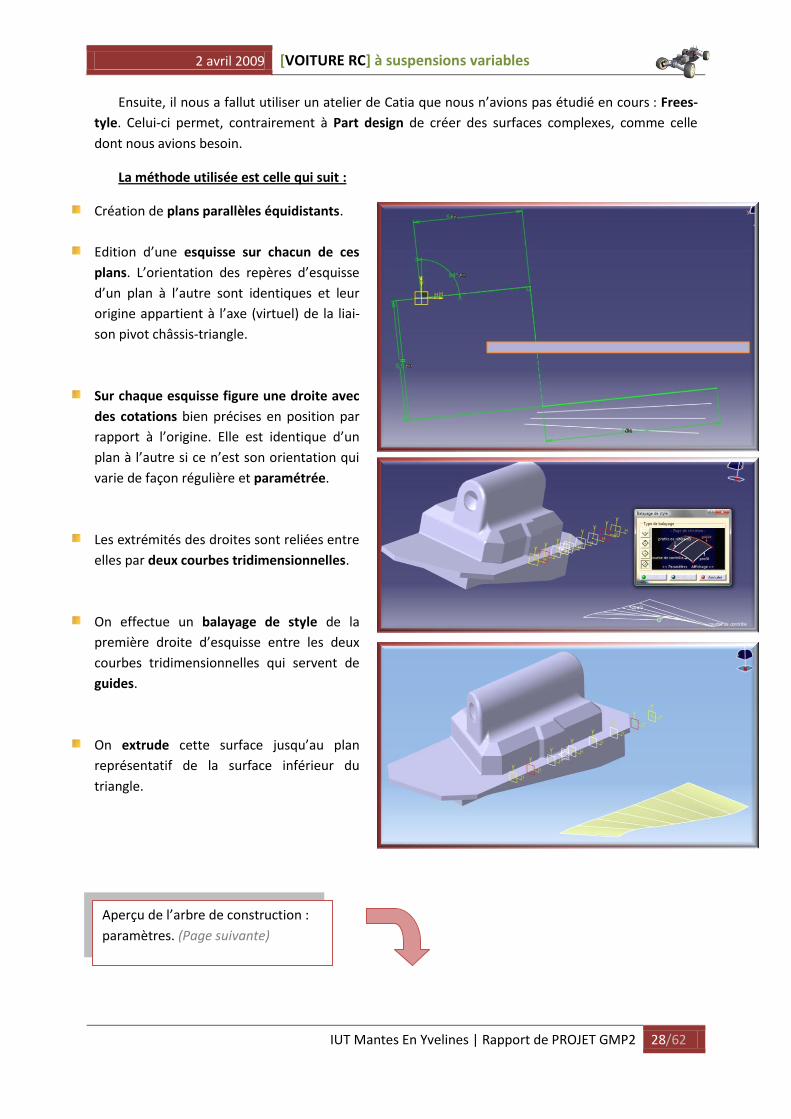
La méthode utilisée est celle qui suit :
Création de plans parallèles équidistants.
Edition d’une esquisse sur chacun de ces
plans. L’orientation des repères d’esquisse
d’un plan à l’autre sont identiques et leur
origine appartient à l’axe (virtuel) de la liai-
son pivot châssis-triangle.
Sur chaque esquisse figure une droite avec
des cotations bien précises en position par
rapport à l’origine. Elle est identique d’un
plan à l’autre si ce n’est son orientation qui
varie de façon régulière et paramétrée.
Les extrémités des droites sont reliées entre
elles par deux courbes tridimensionnelles.
On effectue un balayage de style de la
première droite d’esquisse entre les deux
courbes tridimensionnelles qui servent de
guides.
On extrude cette surface jusqu’au plan
représentatif de la surface inférieur du
triangle.
Aperçu de l’arbre de construction :
paramètres. (Page suivante)
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 29/62
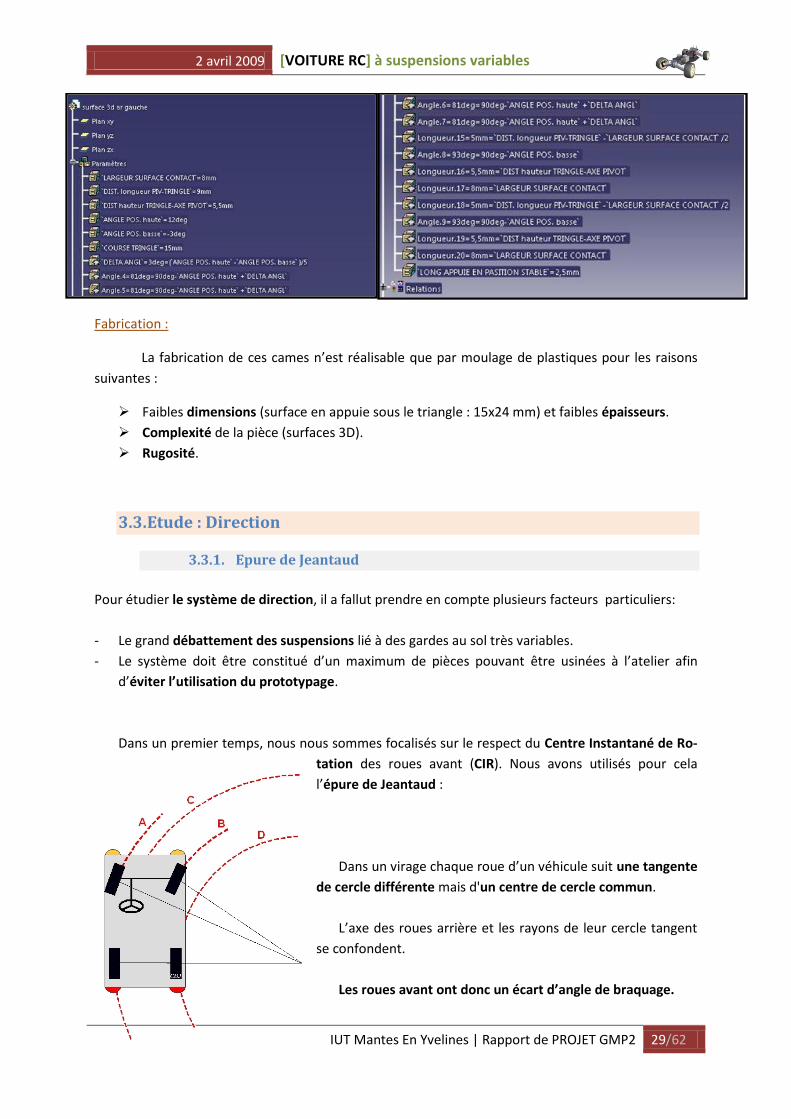
Fabrication :
La fabrication de ces cames n’est réalisable que par moulage de plastiques pour les raisons
suivantes :
Faibles dimensions (surface en appuie sous le triangle : 15x24 mm) et faibles épaisseurs.
Complexité de la pièce (surfaces 3D).
Rugosité.
3.3. Etude : Direction
3.3.1. Epure de Jeantaud
Pour étudier le système de direction, il a fallut prendre en compte plusieurs facteurs particuliers:
- Le grand débattement des suspensions lié à des gardes au sol très variables.
- Le système doit être constitué d’un maximum de pièces pouvant être usinées à l’atelier afin
d’éviter l’utilisation du prototypage.
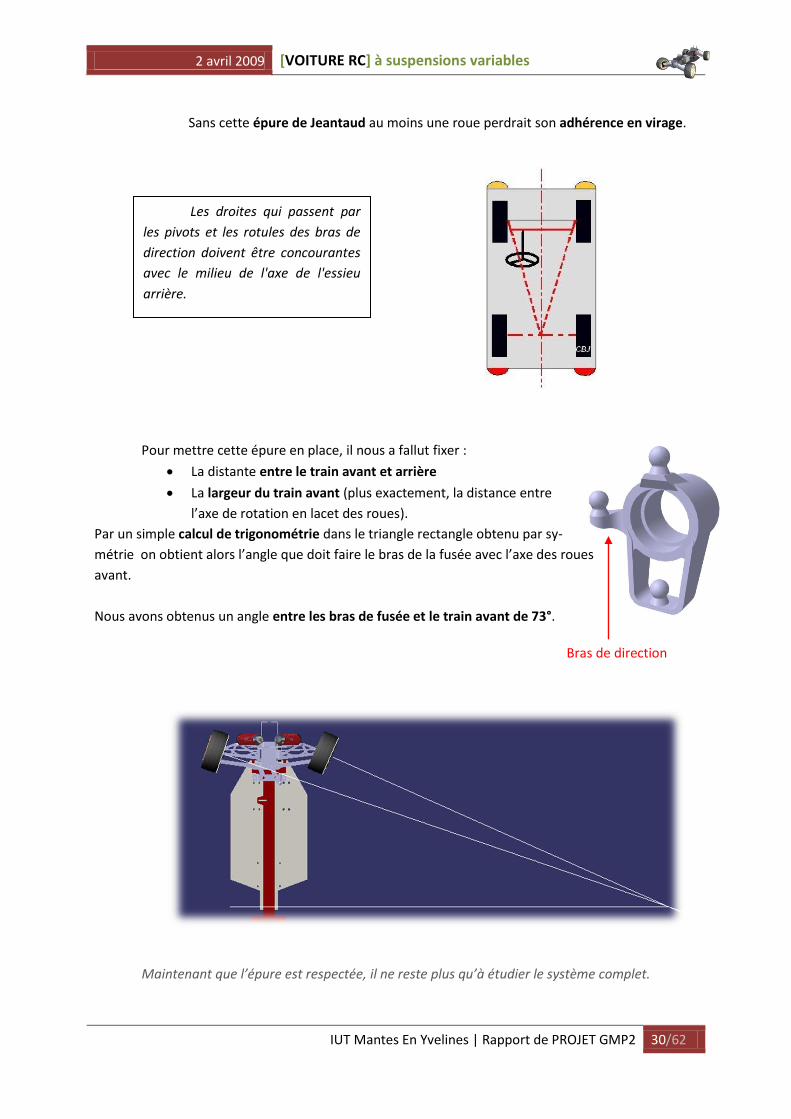
Dans un premier temps, nous nous sommes focalisés sur le respect du Centre Instantané de Ro-
tation des roues avant (CIR). Nous avons utilisés pour cela
l’épure de Jeantaud :
Dans un virage chaque roue d’un véhicule suit une tangente
de cercle différente mais d'un centre de cercle commun.
L’axe des roues arrière et les rayons de leur cercle tangent
se confondent.
Les roues avant ont donc un écart d’angle de braquage.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 30/62
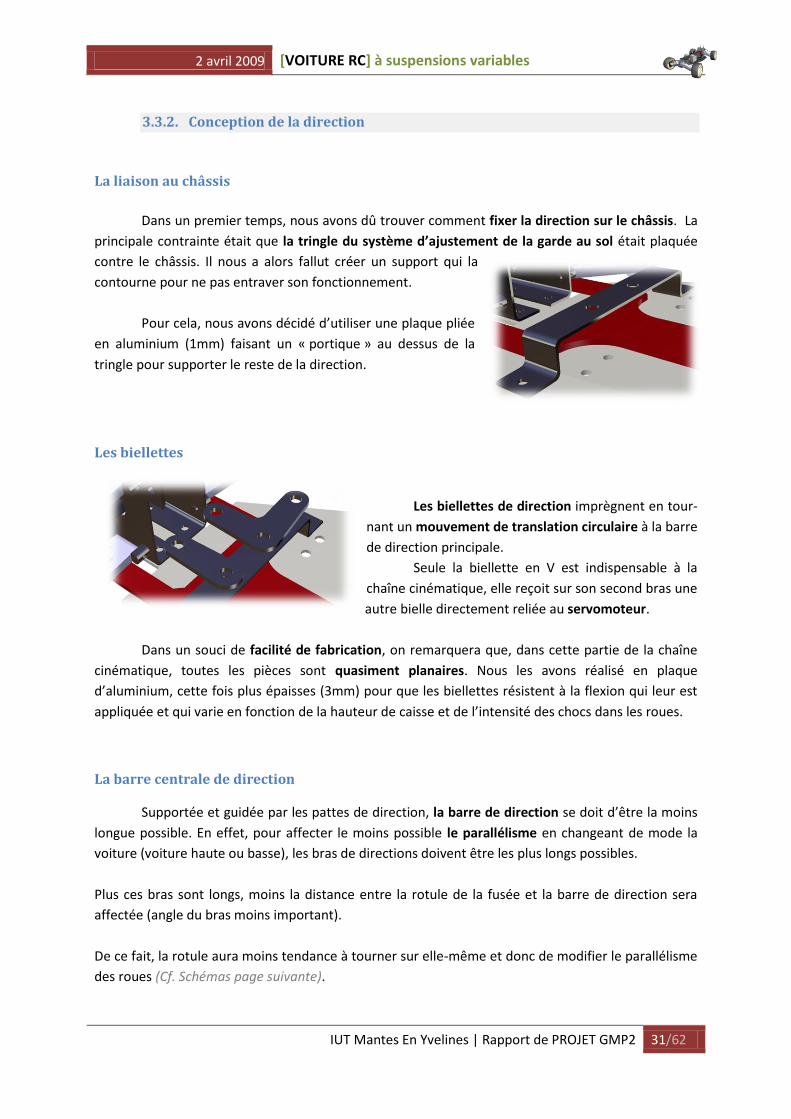
Sans cette épure de Jeantaud au moins une roue perdrait son adhérence en virage.
Pour mettre cette épure en place, il nous a fallut fixer :
La distante entre le train avant et arrière
La largeur du train avant (plus exactement, la distance entre
l’axe de rotation en lacet des roues).
Par un simple calcul de trigonométrie dans le triangle rectangle obtenu par sy-
métrie on obtient alors l’angle que doit faire le bras de la fusée avec l’axe des roues
avant.
Nous avons obtenus un angle entre les bras de fusée et le train avant de 73°.
Maintenant que l’épure est respectée, il ne reste plus qu’à étudier le système complet.
Bras de direction
Les droites qui passent par
les pivots et les rotules des bras de
direction doivent être concourantes
avec le milieu de l'axe de l'essieu
arrière.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 31/62
3.3.2. Conception de la direction
La liaison au châssis
Dans un premier temps, nous avons dû trouver comment fixer la direction sur le châssis. La
principale contrainte était que la tringle du système d’ajustement de la garde au sol était plaquée
contre le châssis. Il nous a alors fallut créer un support qui la
contourne pour ne pas entraver son fonctionnement.
Pour cela, nous avons décidé d’utiliser une plaque pliée
en aluminium (1mm) faisant un « portique » au dessus de la
tringle pour supporter le reste de la direction.
Les biellettes
Les biellettes de direction imprègnent en tour-
nant un mouvement de translation circulaire à la barre
de direction principale.
Seule la biellette en V est indispensable à la
chaîne cinématique, elle reçoit sur son second bras une
autre bielle directement reliée au servomoteur.
Dans un souci de facilité de fabrication, on remarquera que, dans cette partie de la chaîne
cinématique, toutes les pièces sont quasiment planaires. Nous les avons réalisé en plaque
d’aluminium, cette fois plus épaisses (3mm) pour que les biellettes résistent à la flexion qui leur est
appliquée et qui varie en fonction de la hauteur de caisse et de l’intensité des chocs dans les roues.
La barre centrale de direction
Supportée et guidée par les pattes de direction, la barre de direction se doit d’être la moins
longue possible. En effet, pour affecter le moins possible le parallélisme en changeant de mode la
voiture (voiture haute ou basse), les bras de directions doivent être les plus longs possibles.
Plus ces bras sont longs, moins la distance entre la rotule de la fusée et la barre de direction sera
affectée (angle du bras moins important).
De ce fait, la rotule aura moins tendance à tourner sur elle-même et donc de modifier le parallélisme
des roues (Cf. Schémas page suivante).
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 32/62
Bras de direction
Leurs mouvements dans l’espace sont complexes,
c’est pourquoi les liaisons à leurs extrémités sont rotulées.
Après avoir effectué les premiers tests concluants avec le
plastique nous avons décidé d’intégrer les parties mâles et
femelles aux pièces car elles se clipsent facilement et glis-
sent avec très peu de frottement.
Lorsque la roue rencontre un obstacle, plus l’axe
de rotation de la fusée est excentré par rapport au centre
de la roue, plus le choc dans la direction sera fort (principe du bras de levier). Pour préserver le ser-
vomoteur, nous avons donc rentré au maximum la fusée dans la roue. De ce choix à découlé
l’obligation de couder les bras de direc-
tion pour qu’ils ne rentrent pas en colli-
sion avec la roue lors de virages serrés.
Couramment, pour permettre le
réglage du pincement des roues avant,
les bras de direction sont réglables à
l’aide d’une tige doublement filetées à
ses extrémités. Pour compenser, nous
avons usiné deux rainures dans le châs-
sis pour faire translater d’avant en ar-
rière le support de direction.
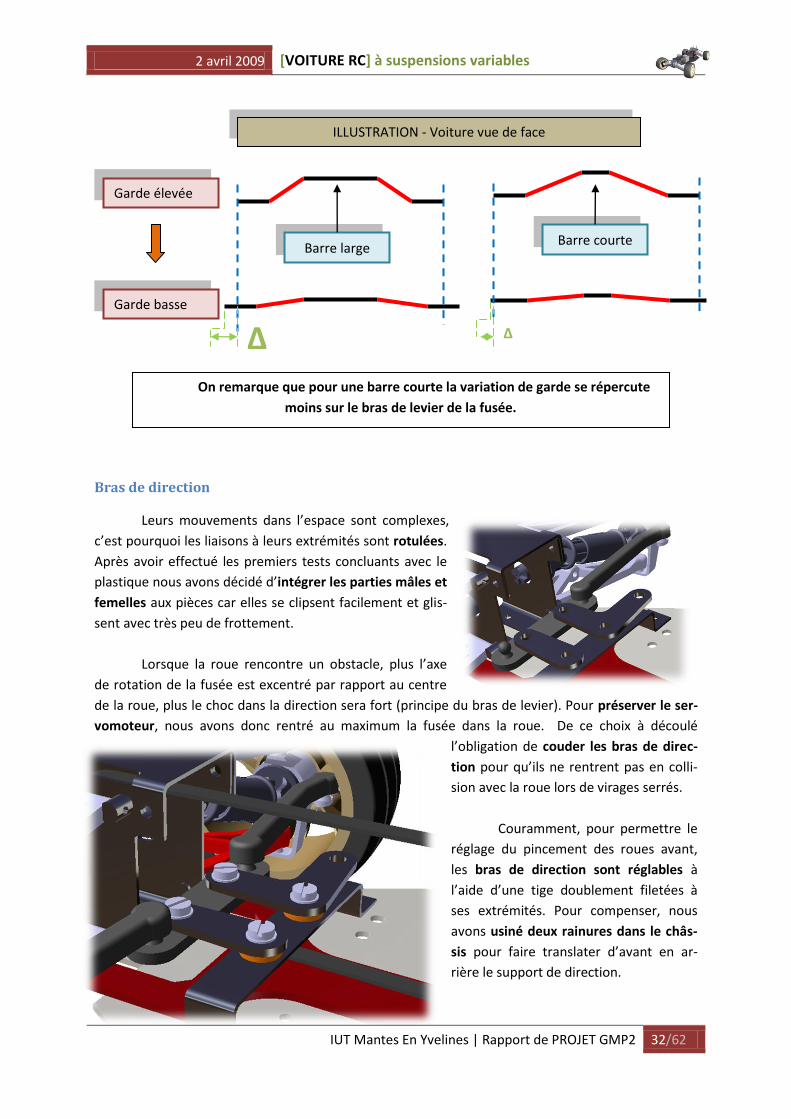
ILLUSTRATION - Voiture vue de face
Garde basse
Garde élevée
Barre large Barre courte
Δ Δ
On remarque que pour une barre courte la variation de garde se répercute
moins sur le bras de levier de la fusée.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 33/62
Nous avons pensé à utiliser des bagues en laiton sous les pattes et le support de direction
pour éviter les frottements d’aluminium contre aluminium, mais celles-ci ne semblent pas néces-
saires après usinage des pièces. Par contre, même si on ne le voit pas (dessin page précédente), nous
avons fabriqué des paliers de laiton qui entoure le filetage des vis.
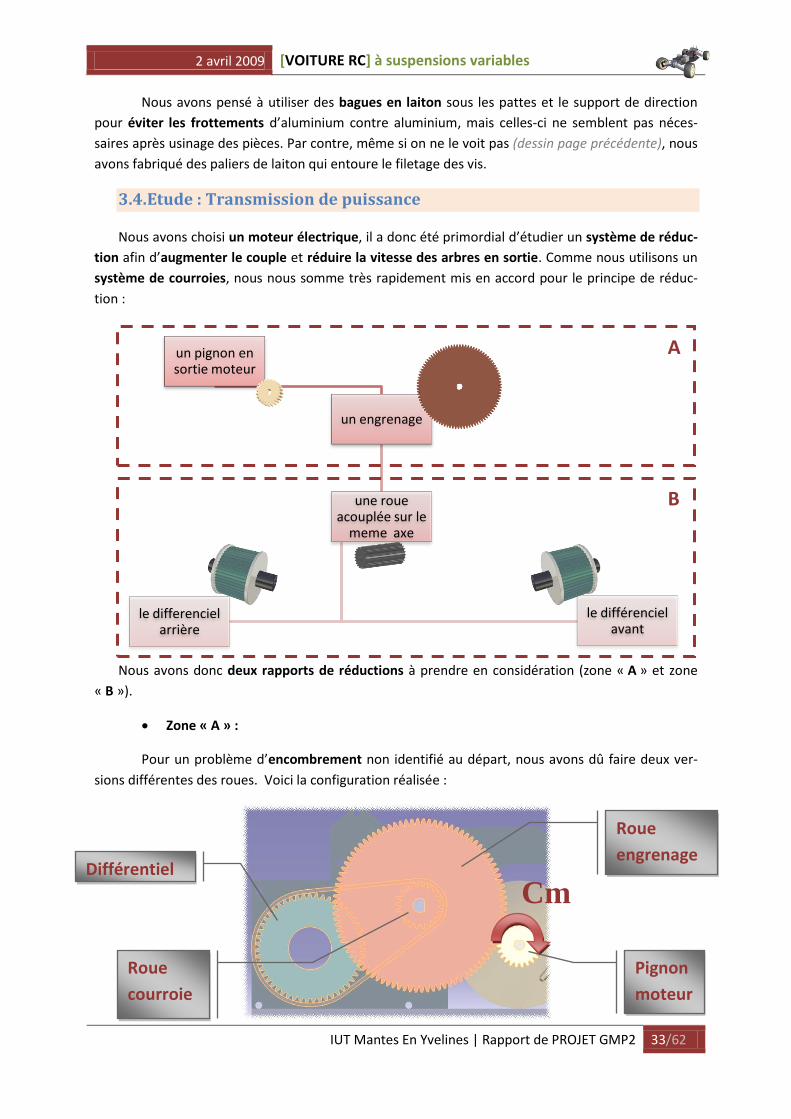
3.4. Etude : Transmission de puissance
Nous avons choisi un moteur électrique, il a donc été primordial d’étudier un système de réduc-
tion afin d’augmenter le couple et réduire la vitesse des arbres en sortie. Comme nous utilisons un
système de courroies, nous nous somme très rapidement mis en accord pour le principe de réduc-
tion :
Nous avons donc deux rapports de réductions à prendre en considération (zone « A » et zone
« B »).
Zone « A » :
Pour un problème d’encombrement non identifié au départ, nous avons dû faire deux ver-
sions différentes des roues. Voici la configuration réalisée :
un pignon en sortie moteur
un engrenage
une roue acouplée sur le
meme axe
le différenciel avant
le differenciel arrière
Cm
Pignon
moteur
Roue
engrenage
Roue
courroie
Différentiel
A
B
2 avril 2009 [VOITURE RC] à suspensions variables
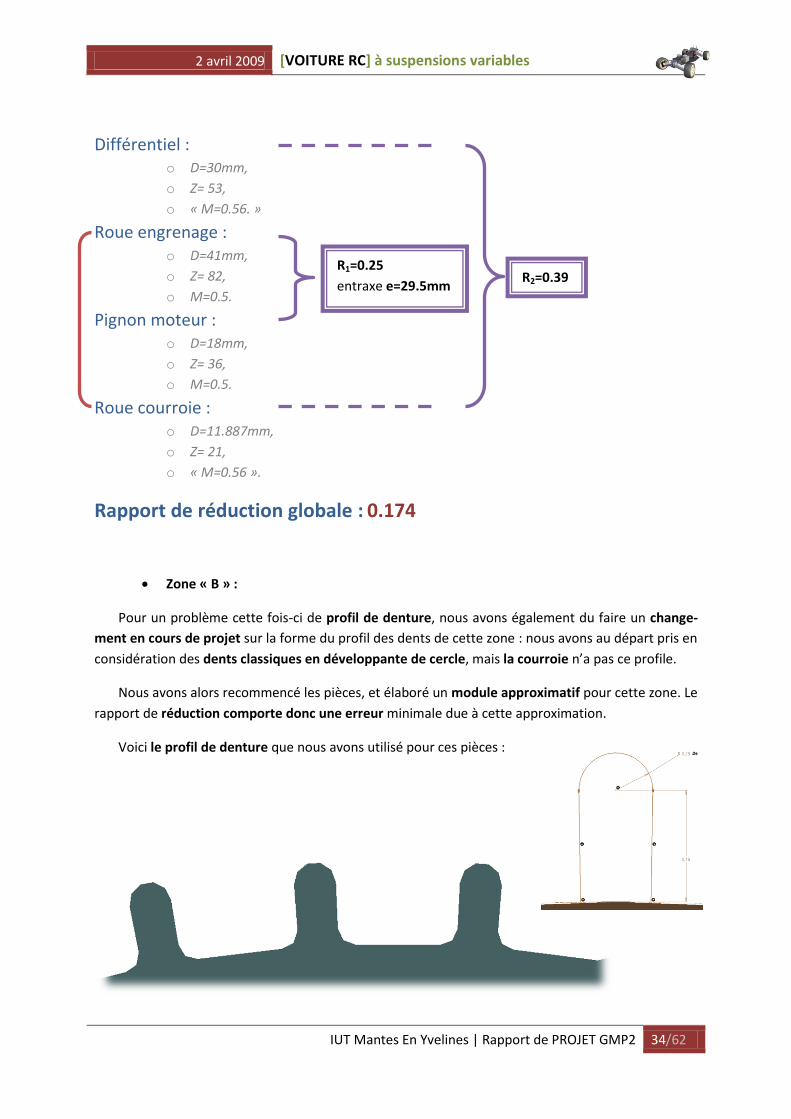
IUT Mantes En Yvelines | Rapport de PROJET GMP2 34/62
Différentiel : o D=30mm,
o Z= 53,
o « M=0.56. »
Roue engrenage : o D=41mm,
o Z= 82,
o M=0.5.
Pignon moteur : o D=18mm,
o Z= 36,
o M=0.5.
Roue courroie : o D=11.887mm,
o Z= 21,
o « M=0.56 ».
Rapport de réduction globale : 0.174
Zone « B » :
Pour un problème cette fois-ci de profil de denture, nous avons également du faire un change-
ment en cours de projet sur la forme du profil des dents de cette zone : nous avons au départ pris en
considération des dents classiques en développante de cercle, mais la courroie n’a pas ce profile.
Nous avons alors recommencé les pièces, et élaboré un module approximatif pour cette zone. Le
rapport de réduction comporte donc une erreur minimale due à cette approximation.
Voici le profil de denture que nous avons utilisé pour ces pièces :
R1=0.25
entraxe e=29.5mm R2=0.39
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 35/62
4. Les Achats
4.1. Recensements
Nous avons commencé par faire une liste de tous les éléments dont nous avions besoin et que
nous ne pouvions pas fabriquer par nos moyens, ou qui n’entraient pas dans le cadre de notre étude
(en particulier l’électronique):
Les pneus et les amortisseurs,
La batterie et le chargeur,
Le moteur et variateur,
La radiocommande, récepteur et les servos-moteurs,
Tout cela sans oublier la matière première utilisée pour l’usinage (aluminium, acier, Carbonne…),
pour le prototypage, le silicone et le plastique pour le moulage… ainsi que toute la quincaillerie
(écroue, vis, rondelles, goupilles mécanindus…).
4.2. A la recherche de conseils pour faire un choix
Ce fut une étape longue et délicate, mais qui nous à beaucoup appris : sur le plan technique
mais également fortement sur l’aspect commercial avec les professionnels. Nous tenons donc à
remercier fortement toutes les personnes qui nous ont conseillés.
Département 75
75011 PARIS AZUR MODELISME
34 Avenue de la république
01 48 05 44 40
01 48 05 44 40
75017 PARIS ELITE MODEL
121 Rue Legendre
01 42 26 49 29
01 42 26 46 00
75005 PARIS EOL
52 Bd St Germain
01 43 54 01 43
75012 PARIS EURO-MODEL
193 Rue de Bercy
01 44 68 88 88
01 44 68 88 80
Département 78 78270 LIMETS PLF CONCEPT
87 Bis Route des Vignes
01 30 98 97 01
78120 RAMBOUILLET ATEM
66 Rue d'Angevillier
01 34 83 81 46
78100 SAINT GERMAIN EN LAYE
LES PETITS MODELES
2 Rue à la Farine
01 30 61 59 54
78670 VILENNES S/SEINE
L.L.Microelectronic
38 Route de Marolles
01 39 75 33 81
Avec des conseils de Mr. Brossard, ou de professionnels de cette liste (non exhaus-
tive), ou par connaissances, par téléphone ou sur place, nous avons déterminé ce qui cor-
respondait le mieux à notre besoin.
75002 PARIS CENTRAL TRAIN
81 Rue de Reaumur
01 42 36 70 37
01 40 39 09 01
75011 PARIS NEW POWER
MODELISME
66 68 Rue de la Folie Regnault
01 40 09 77 54
01 40 09 85 39
75008 PARIS MICROMEGA
14 bis Avenue Hoche
01 45 63 46 52
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 36/62
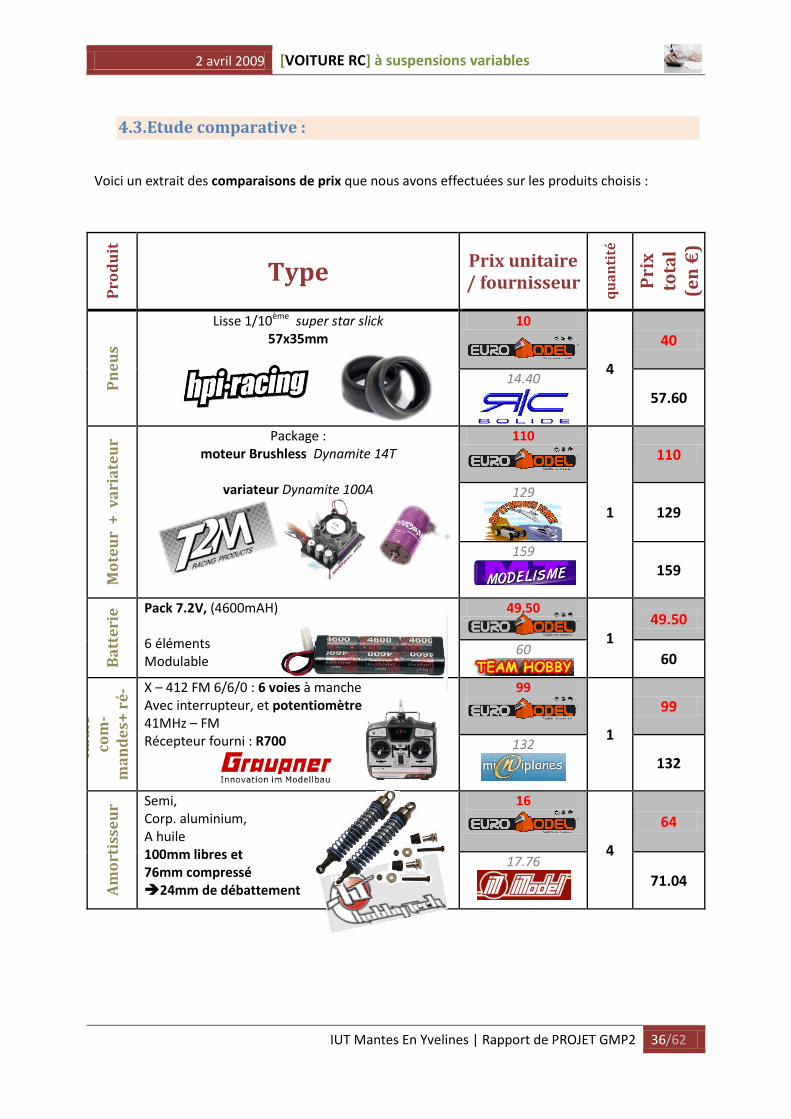
4.3. Etude comparative :
Voici un extrait des comparaisons de prix que nous avons effectuées sur les produits choisis :
Pro
du
it
Type Prix unitaire / fournisseur
qu
an
tité
Pri
x
tota
l (e
n €
)
Pn
eu
s
Lisse 1/10ème super star slick 57x35mm
10
4
40
14.40
57.60
Mo
teu
r +
va
ria
teu
r Package : moteur Brushless Dynamite 14T
variateur Dynamite 100A
110
1
110
129
129
159
159
Ba
tte
rie
Pack 7.2V, (4600mAH) 6 éléments Modulable
49,50
1 49.50
60
60
Ra
dio
-co
m-
ma
nd
es+
ré
-ce
pte
ur
X – 412 FM 6/6/0 : 6 voies à manche Avec interrupteur, et potentiomètre 41MHz – FM Récepteur fourni : R700
99
1
99
132
132
Am
ort
isse
ur Semi,
Corp. aluminium, A huile 100mm libres et 76mm compressé 24mm de débattement
16
4
64
17.76
71.04
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 37/62
4.4. La commande de l’IUT
Par l’intermédiaire de la secrétaire de notre département GMP (Mme RODA Nathalie), un bon de
commande (2008 913 0000734) à été rédigé par la comptable de notre département (Mme DELO-
BELLE Christine) et signé par le directeur de l’IUT (M. ALLAL
Samir).
Nous nous sommes donc rendus à Paris, pour retirer la
totalité de la commande chez la société EURO MODEL :
4 amortisseurs HobbyTech HT 590001
(53.52€ HT),
1 radio commande + récepteur Graupner
4714-41 (82.77€ HT),
1 chargeur Graupner 6411 (43.48€ HT),
3 servos Futaba 1000871 (25.05€ HT),
1 batterie Enrichpower 34664600
(41.39€ HT),
4 pneus hpi-racing 4590 (33.44€ HT),
1 moteur + variateur T2M t3602
(91.97€ HT).
Cette commande a donc couté 444.45€ TTC au dé-
partement GMP.
Il n’eut aucun problème à noter lorsque nous sommes allés réceptionner le tout à Paris, mis-
à-part la non-disponibilité de la radiocommande. Nous avons alors obtenu un arrangement avec le
responsable du magasin pour avoir un modèle plus haut de
gamme (programmable), avec un montant personnel de 50€
TTC supplémentaire réglé sur place.
4.5. Tests Concluants
Nous avons très rapidement testé tout le matériel, pour
vérifier son bon fonctionnement :
Nous avons commencé par souder les différents compo-
sants, puis programmé le variateur. Nous avons ensuite fait
tous les branchements nécessaires et après programmation
de la radiocommande, nous avons pu tester avec succès le
moteur et les trois servomoteurs.
Nous certifions donc, l’achat d’un matériel non défectueux
et dont la qualité nous satisfait. Nous n’avons par-contre pas
pensé à mettre sur la commande de l’huile pour amortisseurs,
car il n’y en avait pas dans ceux achetés.
http://www.euromodel-online.com/
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 38/62
5. La Réalisation
5.1. La plasturgie
Notre projet se rapproche plus de la micromécanique que de la mécanique industrielle et les
moyens de l’atelier ne pouvait pas répondre à nos besoins quant à la fabrication de certaines pièces.
Nous nous sommes alors intéressés dès le début aux équipements de prototypage rapide que pos-
sède l’IUT :
une imprimante 3D cire/résine à la résolution de 4/100 de millimètre.
du silicone pour créer des moules souples
une machine de coulée sous vide de plastiques
Cette méthode de fabrication nous permet de concevoir des pièces de petites dimensions, à la
géométrie complexe et aux caractéristiques mécaniques suffisantes pour nos applications
5.1.1. Modélisation
Lors de la modélisation de nos pièces destinées au prototypage rapide nous avons due nous
plier à certaines contraintes propres aux moyens employés :
D’une part la résolution de l’imprimante (0,04mm) nous interdit des côtes et des jeux d’une pré-
cision inférieure à cette résolution.
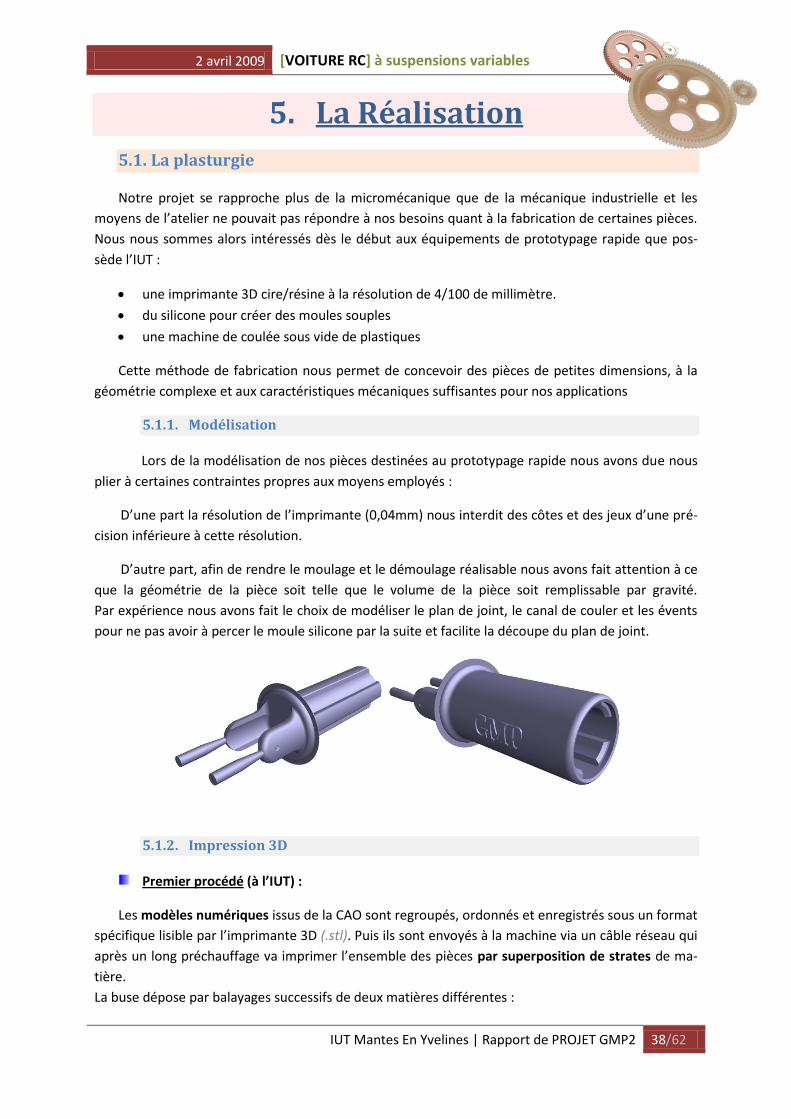
D’autre part, afin de rendre le moulage et le démoulage réalisable nous avons fait attention à ce
que la géométrie de la pièce soit telle que le volume de la pièce soit remplissable par gravité.
Par expérience nous avons fait le choix de modéliser le plan de joint, le canal de couler et les évents
pour ne pas avoir à percer le moule silicone par la suite et facilite la découpe du plan de joint.
5.1.2. Impression 3D
Premier procédé (à l’IUT) :
Les modèles numériques issus de la CAO sont regroupés, ordonnés et enregistrés sous un format
spécifique lisible par l’imprimante 3D (.stl). Puis ils sont envoyés à la machine via un câble réseau qui
après un long préchauffage va imprimer l’ensemble des pièces par superposition de strates de ma-
tière.
La buse dépose par balayages successifs de deux matières différentes :
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 39/62
Le « vide » du modèle CAO est rempli par de la cire qui sert de structure de maintient des
pièces.
Les pièces quant à elles sont formées par une résine qu’un laser durcit après dépôt.
Une impression est longue car la buse ne dépose qu’un filet de matière de diamètre de 0.04 mm
à la fois. Sa durée peut être optimisée en réduisant le volume du parallélépipède qui contient les
pièces dans le fichier CAO.
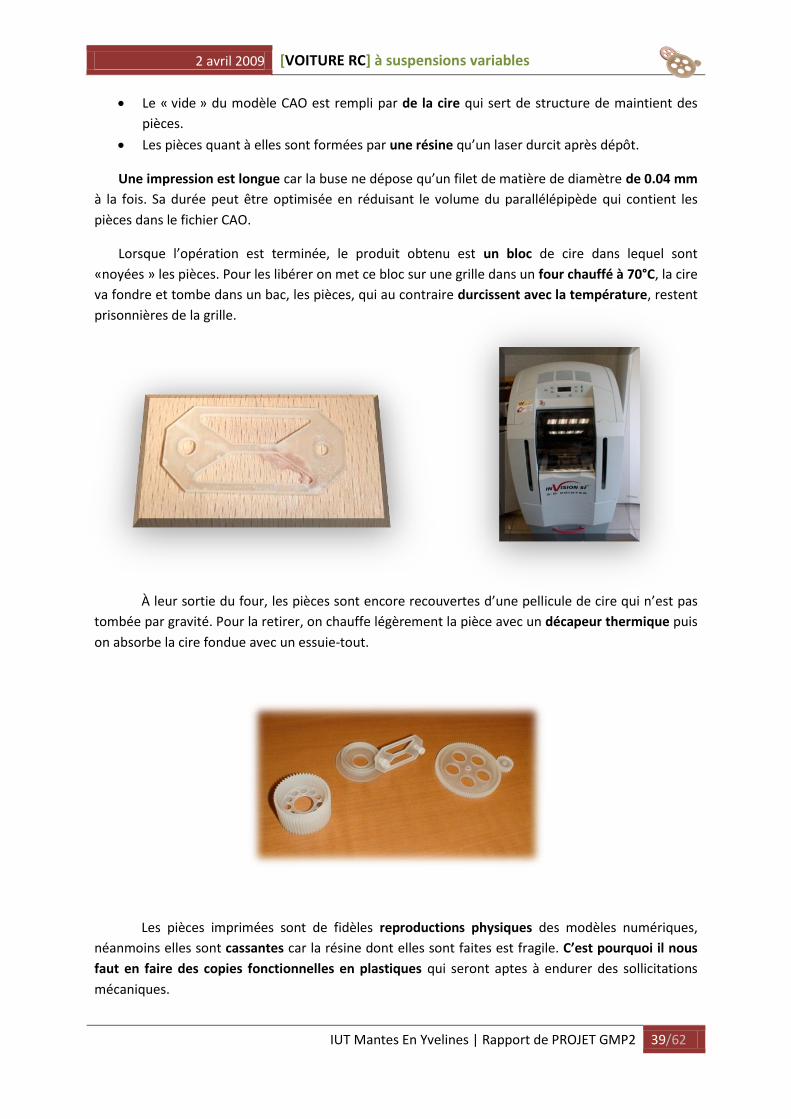
Lorsque l’opération est terminée, le produit obtenu est un bloc de cire dans lequel sont
«noyées » les pièces. Pour les libérer on met ce bloc sur une grille dans un four chauffé à 70°C, la cire
va fondre et tombe dans un bac, les pièces, qui au contraire durcissent avec la température, restent
prisonnières de la grille.
À leur sortie du four, les pièces sont encore recouvertes d’une pellicule de cire qui n’est pas
tombée par gravité. Pour la retirer, on chauffe légèrement la pièce avec un décapeur thermique puis
on absorbe la cire fondue avec un essuie-tout.
Les pièces imprimées sont de fidèles reproductions physiques des modèles numériques,
néanmoins elles sont cassantes car la résine dont elles sont faites est fragile. C’est pourquoi il nous
faut en faire des copies fonctionnelles en plastiques qui seront aptes à endurer des sollicitations
mécaniques.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 40/62
Second procédé :
Mal conçue, la buse d’impression de la machine de l’IUT s’est bouchée vers le milieu de
l’année. La machine n’a pue être réparée car son fabricant n’existe plus et il nous a fallut trouver une
alternative car nous avions beaucoup misé sur le prototypage rapide.
Par chance, M. Laffitte qui est enseignant à l’IUT et dans un lycée a pue imprimer nos pièces
dans son second établissement. Nous tenons d’ailleurs à le remercier pour l’important temps qu’il y a
passé.
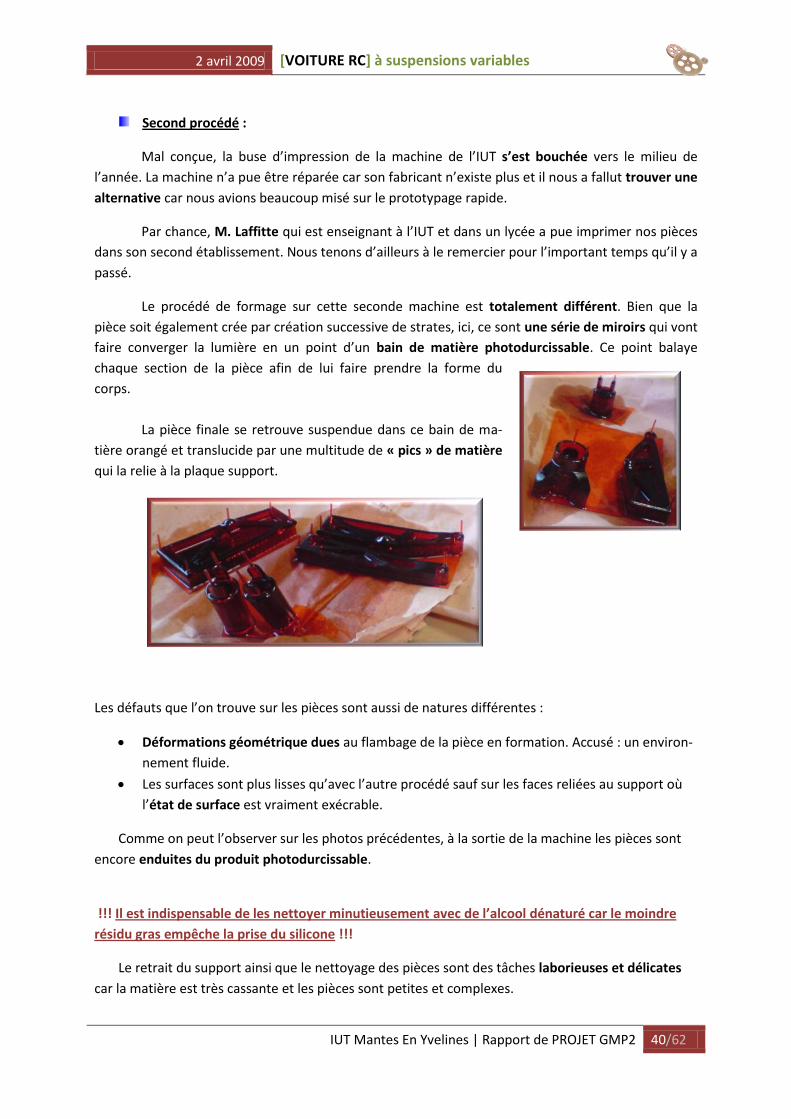
Le procédé de formage sur cette seconde machine est totalement différent. Bien que la
pièce soit également crée par création successive de strates, ici, ce sont une série de miroirs qui vont
faire converger la lumière en un point d’un bain de matière photodurcissable. Ce point balaye
chaque section de la pièce afin de lui faire prendre la forme du
corps.
La pièce finale se retrouve suspendue dans ce bain de ma-
tière orangé et translucide par une multitude de « pics » de matière
qui la relie à la plaque support.
Les défauts que l’on trouve sur les pièces sont aussi de natures différentes :
Déformations géométrique dues au flambage de la pièce en formation. Accusé : un environ-
nement fluide.
Les surfaces sont plus lisses qu’avec l’autre procédé sauf sur les faces reliées au support où
l’état de surface est vraiment exécrable.
Comme on peut l’observer sur les photos précédentes, à la sortie de la machine les pièces sont
encore enduites du produit photodurcissable.
!!! Il est indispensable de les nettoyer minutieusement avec de l’alcool dénaturé car le moindre
résidu gras empêche la prise du silicone !!!
Le retrait du support ainsi que le nettoyage des pièces sont des tâches laborieuses et délicates
car la matière est très cassante et les pièces sont petites et complexes.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 41/62
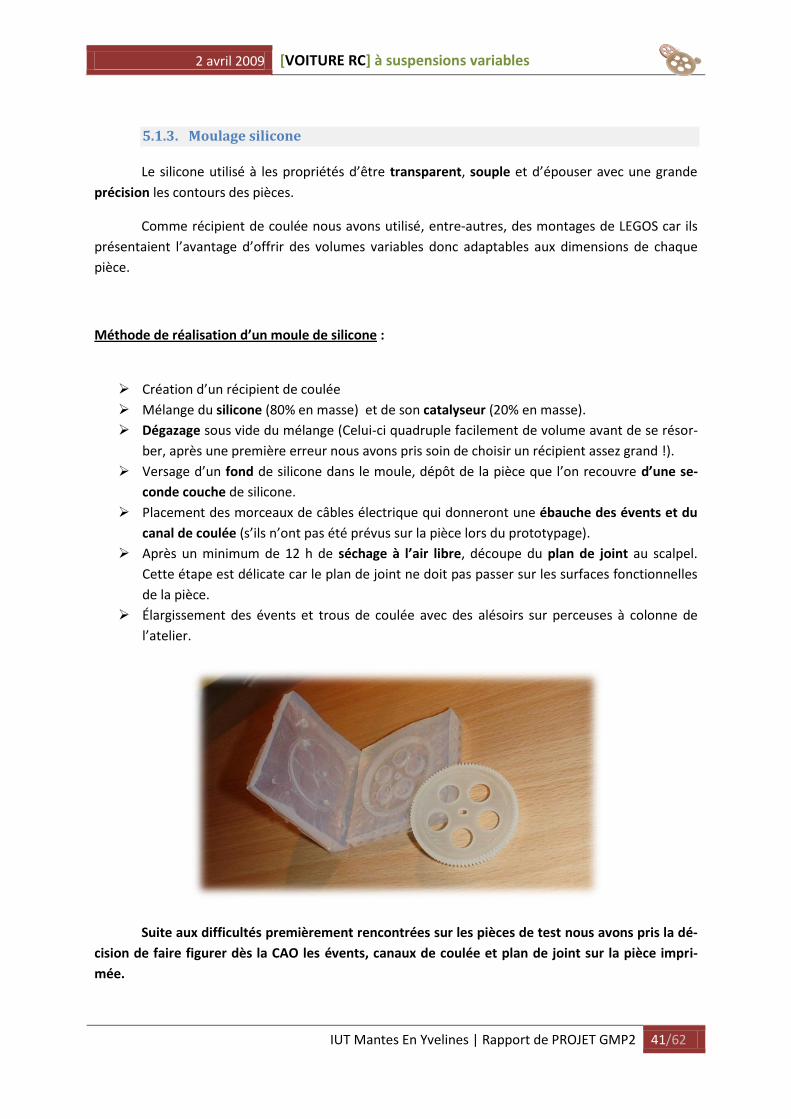
5.1.3. Moulage silicone
Le silicone utilisé à les propriétés d’être transparent, souple et d’épouser avec une grande
précision les contours des pièces.
Comme récipient de coulée nous avons utilisé, entre-autres, des montages de LEGOS car ils
présentaient l’avantage d’offrir des volumes variables donc adaptables aux dimensions de chaque
pièce.
Méthode de réalisation d’un moule de silicone :
Création d’un récipient de coulée
Mélange du silicone (80% en masse) et de son catalyseur (20% en masse).
Dégazage sous vide du mélange (Celui-ci quadruple facilement de volume avant de se résor-
ber, après une première erreur nous avons pris soin de choisir un récipient assez grand !).
Versage d’un fond de silicone dans le moule, dépôt de la pièce que l’on recouvre d’une se-
conde couche de silicone.
Placement des morceaux de câbles électrique qui donneront une ébauche des évents et du
canal de coulée (s’ils n’ont pas été prévus sur la pièce lors du prototypage).
Après un minimum de 12 h de séchage à l’air libre, découpe du plan de joint au scalpel.
Cette étape est délicate car le plan de joint ne doit pas passer sur les surfaces fonctionnelles
de la pièce.
Élargissement des évents et trous de coulée avec des alésoirs sur perceuses à colonne de
l’atelier.
Suite aux difficultés premièrement rencontrées sur les pièces de test nous avons pris la dé-
cision de faire figurer dès la CAO les évents, canaux de coulée et plan de joint sur la pièce impri-
mée.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 42/62
5.1.4. Coulée sous vide
Les différents composés plastiques à notre disposition étaient les suivants :
Descriptif Propriétés mécaniques Commentaires Applications
Résine époxyde avec
particules métalliques
- Faible retrait
- Bonne résistance à
l’abrasion
- Très bonne résis-
tance à la compres-
sion
- Haute dureté
Extrêmement visqueux
donc très difficile à cou-
ler. Le faire chauffer le
fluidifie mais le fait dur-
cir en quelques minutes.
Engrenages
Polyuréthane de coulée
PX 100
- Assez bonne résis-
tance aux chocs
Très faible viscosité,
idéal pour les pièces de
faible épaisseur.
Pièces rigides suscep-
tibles de recevoir des
chocs : triangles de sus-
pensions.
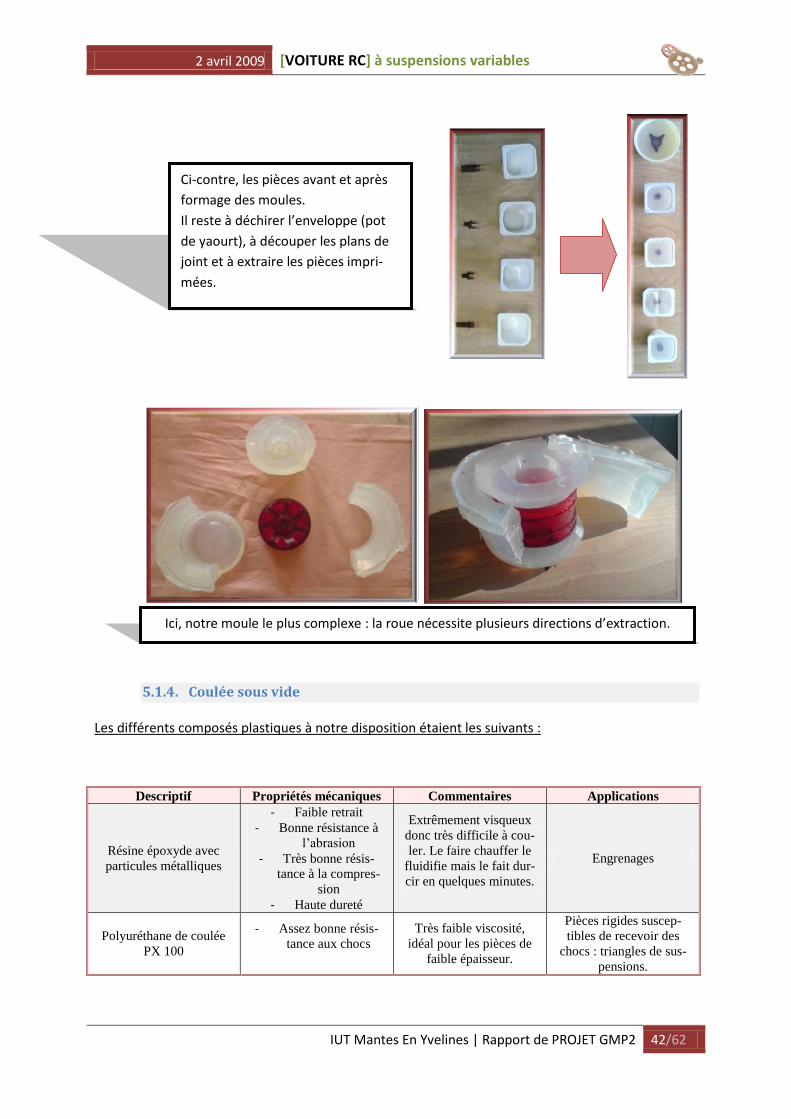
Ci-contre, les pièces avant et après
formage des moules.
Il reste à déchirer l’enveloppe (pot
de yaourt), à découper les plans de
joint et à extraire les pièces impri-
mées.
Ici, notre moule le plus complexe : la roue nécessite plusieurs directions d’extraction.
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 43/62
Polyuréthane de coulée
PX 220
- Excellente résistance
aux chocs.
- Meilleure résistance
en flexion, traction,
compression que le
PX100
Plus visqueux que le
PX100
Date de péremption
amplement dépassée
Elastomère de Polyuré-
thane
- Bonne résistance au
déchirement
- Excellente résistance
à l’abrasion
- Haute résilience
Plastique souple, translu-
cide mais esthétiquement
médiocre : la matière a
tourné au marron en
vieillissant.
Pare-choc
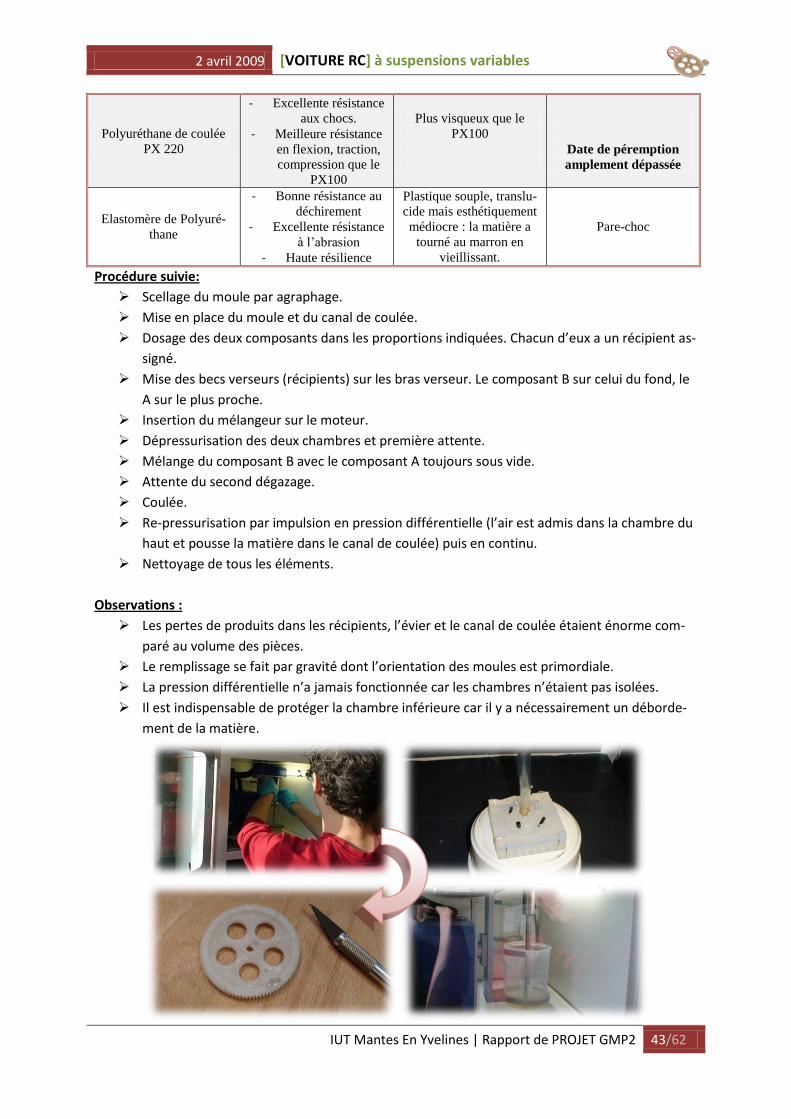
Procédure suivie:
Scellage du moule par agraphage.
Mise en place du moule et du canal de coulée.
Dosage des deux composants dans les proportions indiquées. Chacun d’eux a un récipient as-
signé.
Mise des becs verseurs (récipients) sur les bras verseur. Le composant B sur celui du fond, le
A sur le plus proche.
Insertion du mélangeur sur le moteur.
Dépressurisation des deux chambres et première attente.
Mélange du composant B avec le composant A toujours sous vide.
Attente du second dégazage.
Coulée.
Re-pressurisation par impulsion en pression différentielle (l’air est admis dans la chambre du
haut et pousse la matière dans le canal de coulée) puis en continu.
Nettoyage de tous les éléments.
Observations :
Les pertes de produits dans les récipients, l’évier et le canal de coulée étaient énorme com-
paré au volume des pièces.
Le remplissage se fait par gravité dont l’orientation des moules est primordiale.
La pression différentielle n’a jamais fonctionnée car les chambres n’étaient pas isolées.
Il est indispensable de protéger la chambre inférieure car il y a nécessairement un déborde-
ment de la matière.

2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 44/62
5.1.5. Injection
Sur la machine à couler sous vide, la pression différentielle, qui aurait pu aider à
l’écoulement des plastiques visqueux comme la résine époxy, s’est révélée inefficace par
l’absence de joint entre le compartiment supérieur et le compartiment inférieur.
Nous avons donc été contraints de trouver une solution pour faire pénétrer
la résine époxy dans son moule, qui s’est révélée dans l’utilisation d’une seringue
qui nous a donné des résultats très concluants :
Meilleur dosage.
Facilité dans l’élimination de bulle d’air.
Rapidité.
5.1.6. Finitions
Une pièce plastique tout juste démoulée, présente parfois des traces, due au plan de
joint trop apparent, et également aux évents. Il est donc nécessaire d’effectuer une fini-
tion afin de corriger ces défauts.
Nous utilisons alors :
Une meuleuse, pour les grandes surfaces planes,
Des petites limes de forme, pour les géométries complexes et de
petites tailles,
Du papier-de-verre de différents grains, plus ou moins précis.
Des scalpels, pour couper en particulier les évents.

2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 45/62
5.2. Fabrications mécaniques
La fabrication des pièces mécanique de
notre voiture, est la fabrication la plus
délicate que nous réalisons.
Dès que l’étude d’avant
projet nous l’a permis, nous avons
commencé en parallèle à usiner et
prototyper certaines pièces élémen-
taires. Car nous savions que c’était la
fabrication qui prendrait le plus de temps
sur notre projet.
Nous présenterons ici, un extrait des pièces mécaniques que nous avons produites sous dif-
férentes formes :
5.2.1. Transmission
La transmission du couple sortant du system de réduction ce fait a l’aide de différentiels et
de cardant si un de ces éléments ne remplis plus sa fonction il crée une rupture dans la
chaine de transmission (schéma explicatif) et la voiture reste immobile.
Tout cela nous donne une idée de l’importance de cette chaine !
5.2.2. Engrenages
Les engrenages fut délicat au niveau du prototypage car les
dents des couronnes sont très fines donc sujets à un mauvais remplis-
sage lors du coulage qui donna lieu à de nombreuses inclusions de bulles
d’air. Ce problème nous a amené à augmenter le nombre d’évents et de
les excentrer sur la pièce.
Comme nous avons fait deux versions de réducteur, nous avons
réalisé des moules et des coulées de plastique qui n’ont servies qu’à nous
former et pourrons servir d’illustration du procédé dans la salle de prototy-
page rapide.
Voici le premier modèle d’engrènement réalisé :
Pour les nouveaux engrenages, nous avons simplifié la forme de la
roue, et ajouté directement des évents/plant de joint/dépouilles, sur la pièce prototypé pour faciliter
Moteur
+Réducteur
Courroie Différentiels Cardans Roues

2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 46/62
le moulage et la coulée. Le résultat obtenu à été suffisamment précis pour l’ajustement nécessaire
calculé précédemment :
5.2.3. Cardan
Le cardan (ou plus précisément le joint de Cardan) est un dispositif mécanique qui permet la
transmission d'une rotation angulaire entre deux arbres dont les axes géométriques concourent en
un même point.
Les doubles cardans permettent une transmission homocinétique du
couple en sortie des différentiels aux roues en autorisant un débattement
et/ou des essieux.
Deux versions ont été réalisées. Une première version totalement moulée en plastique, mais
dont le résultat fut infructueux pour deux raisons :
En dépit des nombreuses dépouilles certaines pièces comme la partie femelle prototypée n’a
pue être retirée du moule de silicone sans être cassée : la pièce subissait trop de frottement superfi-
ciel comparé à sa résistance.
Le moulage ne nous a pas donné des cardans de bonne qualité et cela à cause des plastiques
pour la majorité périmés :
1ère version

2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 47/62
Nous avons alors décidé, après l’échec du moulage, de revoir la conception pour élaborer un
nouveau système de liaison glissière et double cardans. Nous nous sommes donc rabattus sur une
solution plus classique et radicale qui est l’usinage des cardans à 100% :
Nous avons réalisé des programmes simples (Cf. en annexe
l’exemple de programme) pour une réalisation série des pièces (8
pièces extérieur + 4 cardans males et 4 femelles), et finis par des
perçages, taraudages et rainurage en conventionnelle.
De nombreux jeux, aussi bien en ajustement glissants que
serrés étaient nécessaires au bon fonctionnement. Nous nous
somme donc appliqué et parfois nous avons dû mettre une pièce au
rebut pour avoir les bons ajustements (via les jauges outils).
Nous avons réalisé les croisillons en croisant sous presse des
axes montés sur un anneau usiné en laiton. Nous avons également
tenté de coller les axes des croisillons avec de la colle spéciale pour
aluminium. Ce fut un test concluant mécaniquement, mais n’était
pas esthétique et moins rapide à mettre en œuvre.
Nous avons enfin fini par faire l’assemblage avec les élé-
ments extérieur :
différentiel, roule-
ments, les fusées et
les roues :
Version finale
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 48/62
5.2.4. Différentiels
5.2.4.1. Présentation :
Un différentiel est un système mécanique qui a pour fonction de distribuer une vitesse de rota-tion par répartition de l'effort dynamique, de façon adapta-tive, immédiate et automatique, aux besoins d'un ensemble mécanique
Par exemple, il est très utile sur un véhicule automo-bile, où il permet aux roues motrices de tourner à des vitesses différentes lors du passage d'une courbe : les roues situées à l'extérieur du virage tournent plus vite que celle situées à l'intérieur.
Pour notre projet nous avions besoin de deux différentiels : à l’avant et à l’arrière (4 roues mo-trices), les différentiels utilisés sont des différentiels à billes. Ceux-ci sont plus faciles à fabriquer : dans ce genre de différentiel, les satellites sont remplacés par des billes, (elles jouent le même rôle) elles transmettent la puissance par des contacts ponctuels, elles se trouvent entre deux plateaux et en tournant sur elles mêmes elles transmettent alors la puissance à la partie la plus libre (Cf. sché-mas explicatifs).
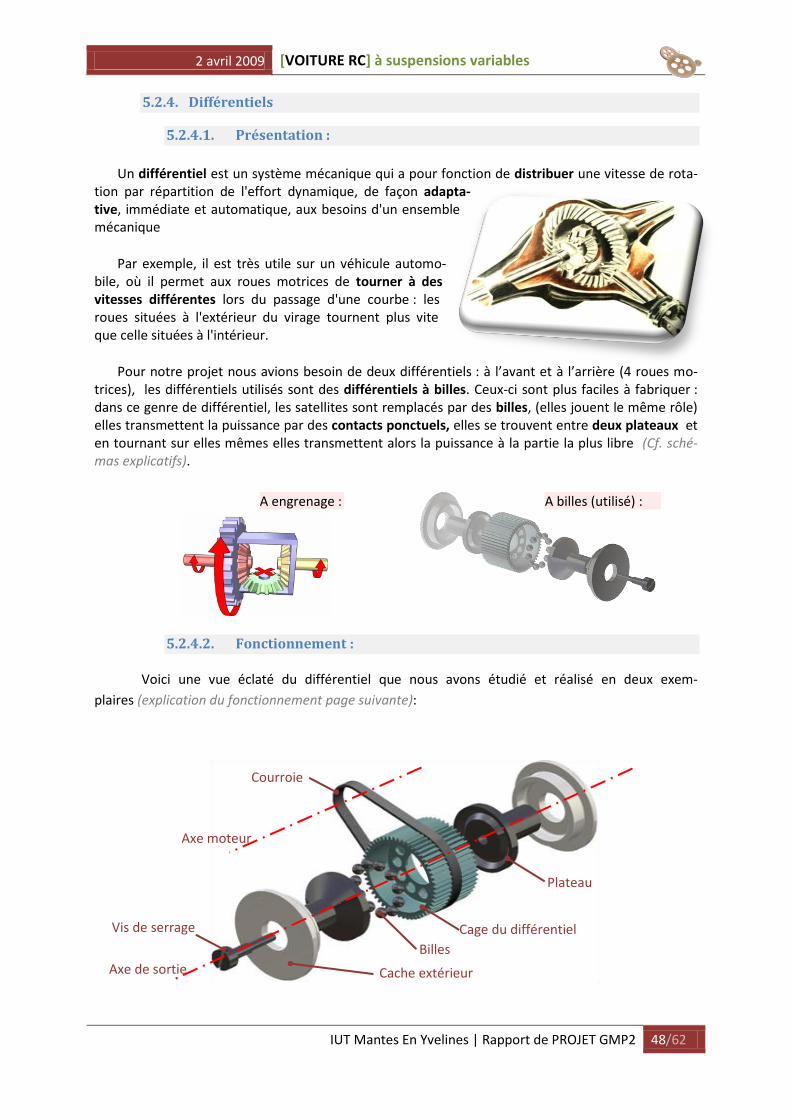
5.2.4.2. Fonctionnement :
Voici une vue éclaté du différentiel que nous avons étudié et réalisé en deux exem-
plaires (explication du fonctionnement page suivante):
Axe de sortie
Axe moteur
Courroie
Cage du différentiel
Billes
Plateau
Cache extérieur
Vis de serrage
A engrenage : A billes (utilisé) :
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 49/62
a) Extérieur :
La courroie entrainée par le moteur électrique tourne et entraine le différentiel (la cage exté-rieure du différentiel), alors le mouvement est transmis aux roues via les cardans.
b) Intérieure :
La cage est entrainée par la courroie. Cette cage fait tourner des billes qui sont en contact ponc-
tuels avec deux plateaux, qui transmettent à leurs tours la puissance aux roues par le biais des car-
dans.
Tous les frottements ont été éliminés en utilisant un palier à billes. Qui a été usiné à l’atelier de
l’IUT.
5.2.4.3. Conception et réalisation
a) Conception :
La conception de ce différentiel a soulevé des problèmes techniques à résoudre comme le choix
de la matière à utiliser, la forme, la disposition (dimension), et la géométrie de dentures, etc :
i) Dans un souci d’économie, nous nous sommes restreint, pour les matières plas-
tiques, à celles qui étaient déjà présentes à l’atelier de prototypage.
Pour l’usinage des plateaux nous avons choisi l’acier pour limiter l’écrouissement résultant de la
pression et du roulement des billes. L’apparition d’un jeu d’usure n’est pas admissible car le contact
est indispensable au fonctionnement du différentiel.
ii) La conception des dents de la cage nous a posé un problème car nous n’avons pas eu
de cours sur les entrainements par courroies. Nous avons dû déterminer le module de notre chaine,
ainsi que le nombre de dents par rapport au diamètre choisi en appliquant nos propres règles de
calcul (Cf. 3.4.Etude : transmission de puissance).
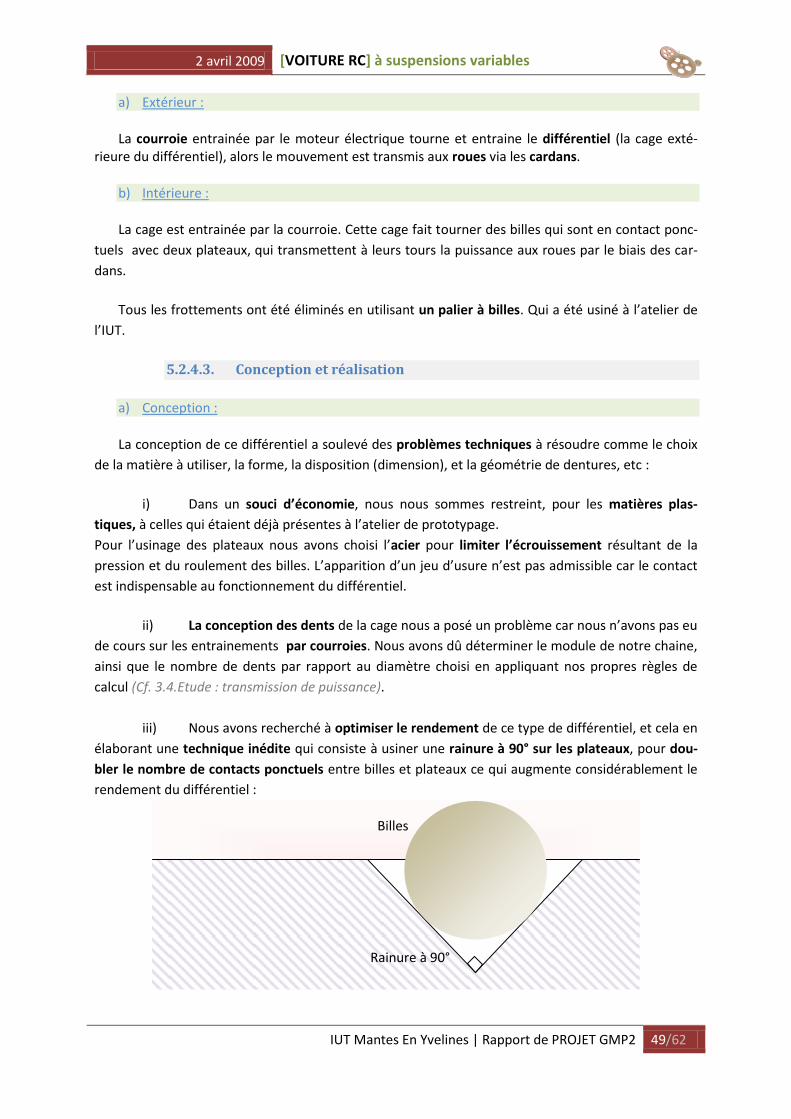
iii) Nous avons recherché à optimiser le rendement de ce type de différentiel, et cela en
élaborant une technique inédite qui consiste à usiner une rainure à 90° sur les plateaux, pour dou-
bler le nombre de contacts ponctuels entre billes et plateaux ce qui augmente considérablement le
rendement du différentiel :
Billes
Rainure à 90°
2 avril 2009 [VOITURE RC] à suspensions variables
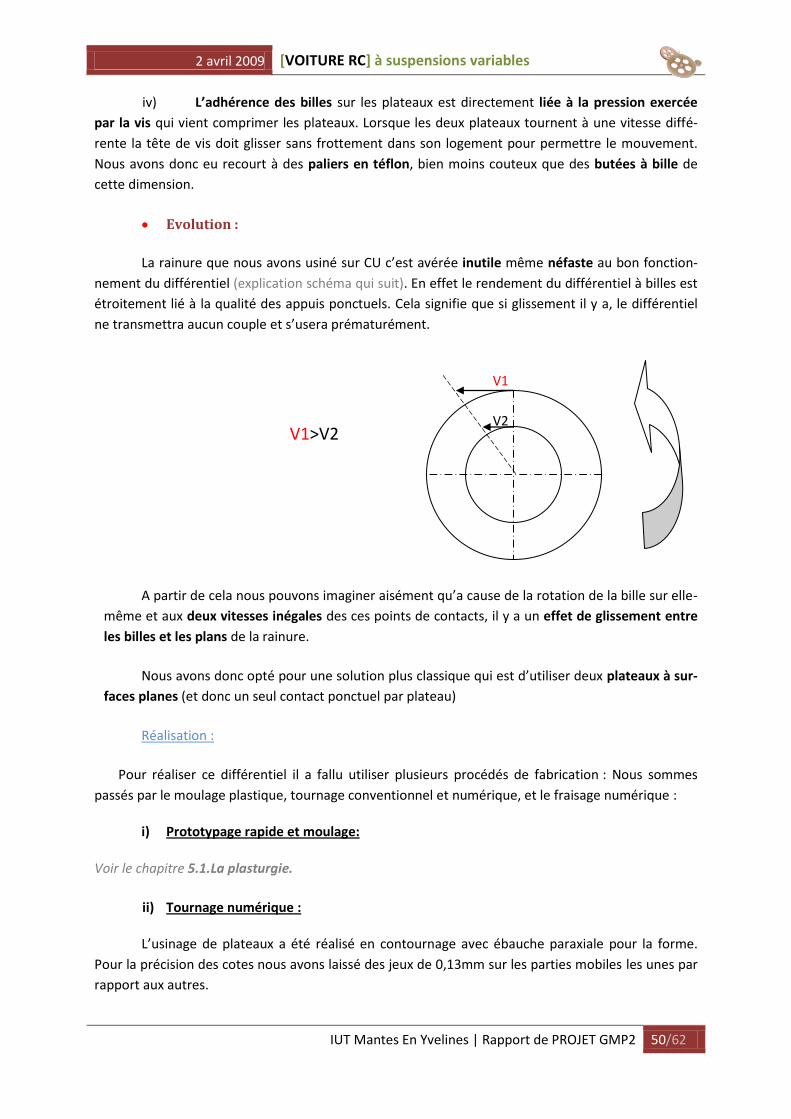
IUT Mantes En Yvelines | Rapport de PROJET GMP2 50/62
iv) L’adhérence des billes sur les plateaux est directement liée à la pression exercée
par la vis qui vient comprimer les plateaux. Lorsque les deux plateaux tournent à une vitesse diffé-
rente la tête de vis doit glisser sans frottement dans son logement pour permettre le mouvement.
Nous avons donc eu recourt à des paliers en téflon, bien moins couteux que des butées à bille de
cette dimension.
Evolution :
La rainure que nous avons usiné sur CU c’est avérée inutile même néfaste au bon fonction-
nement du différentiel (explication schéma qui suit). En effet le rendement du différentiel à billes est
étroitement lié à la qualité des appuis ponctuels. Cela signifie que si glissement il y a, le différentiel
ne transmettra aucun couple et s’usera prématurément.
A partir de cela nous pouvons imaginer aisément qu’a cause de la rotation de la bille sur elle-
même et aux deux vitesses inégales des ces points de contacts, il y a un effet de glissement entre
les billes et les plans de la rainure.
Nous avons donc opté pour une solution plus classique qui est d’utiliser deux plateaux à sur-
faces planes (et donc un seul contact ponctuel par plateau)
Réalisation :
Pour réaliser ce différentiel il a fallu utiliser plusieurs procédés de fabrication : Nous sommes
passés par le moulage plastique, tournage conventionnel et numérique, et le fraisage numérique :
i) Prototypage rapide et moulage:
Voir le chapitre 5.1.La plasturgie.
ii) Tournage numérique :
L’usinage de plateaux a été réalisé en contournage avec ébauche paraxiale pour la forme.
Pour la précision des cotes nous avons laissé des jeux de 0,13mm sur les parties mobiles les unes par
rapport aux autres.
V1
V2 V1>V2
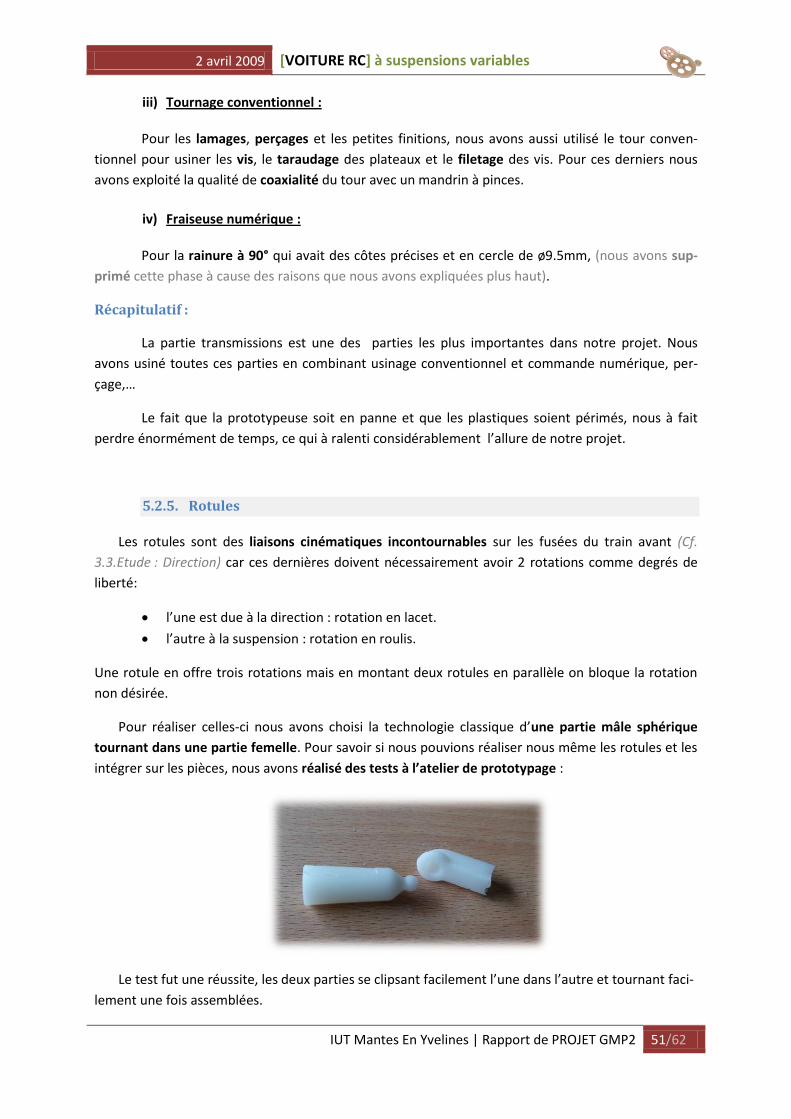
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 51/62
iii) Tournage conventionnel :
Pour les lamages, perçages et les petites finitions, nous avons aussi utilisé le tour conven-
tionnel pour usiner les vis, le taraudage des plateaux et le filetage des vis. Pour ces derniers nous
avons exploité la qualité de coaxialité du tour avec un mandrin à pinces.
iv) Fraiseuse numérique :
Pour la rainure à 90° qui avait des côtes précises et en cercle de ø9.5mm, (nous avons sup-
primé cette phase à cause des raisons que nous avons expliquées plus haut).
Récapitulatif :
La partie transmissions est une des parties les plus importantes dans notre projet. Nous
avons usiné toutes ces parties en combinant usinage conventionnel et commande numérique, per-
çage,…
Le fait que la prototypeuse soit en panne et que les plastiques soient périmés, nous à fait
perdre énormément de temps, ce qui à ralenti considérablement l’allure de notre projet.
5.2.5. Rotules
Les rotules sont des liaisons cinématiques incontournables sur les fusées du train avant (Cf.
3.3.Etude : Direction) car ces dernières doivent nécessairement avoir 2 rotations comme degrés de
liberté:
l’une est due à la direction : rotation en lacet.
l’autre à la suspension : rotation en roulis.
Une rotule en offre trois rotations mais en montant deux rotules en parallèle on bloque la rotation
non désirée.
Pour réaliser celles-ci nous avons choisi la technologie classique d’une partie mâle sphérique
tournant dans une partie femelle. Pour savoir si nous pouvions réaliser nous même les rotules et les
intégrer sur les pièces, nous avons réalisé des tests à l’atelier de prototypage :
Le test fut une réussite, les deux parties se clipsant facilement l’une dans l’autre et tournant faci-
lement une fois assemblées.

2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 52/62
Nous avons alors pu prototyper, et mouler les triangles et direction avant de la voiture avec ce
type de rotule :
5.2.6. Structure principale
Comme dit dans l’introduction de se rapport, nous ne présenterons que les pièces pré-
sentant des formes complexes, et non classique que nous avons réalisé pour se projet.
Usinage de tôle – Première méthode
Sur la structure principale, les pièces les plus délicates (et qui nous ont demandées le plus
d’essais, de précisions et de concentration), ont été les
plaques des supports moteur et différentiel
avant/arrière. Des plaques d’aluminium à contourner
(délicat pour des pièces déformables), plier, percer et
coller.
En revanche, le bâti ne présentant pas de formes arrondit, et
ne demandant pas une grande précision sur le contournage, nous
l’avons découpé en suivant un tracé avec la scie à ruban.
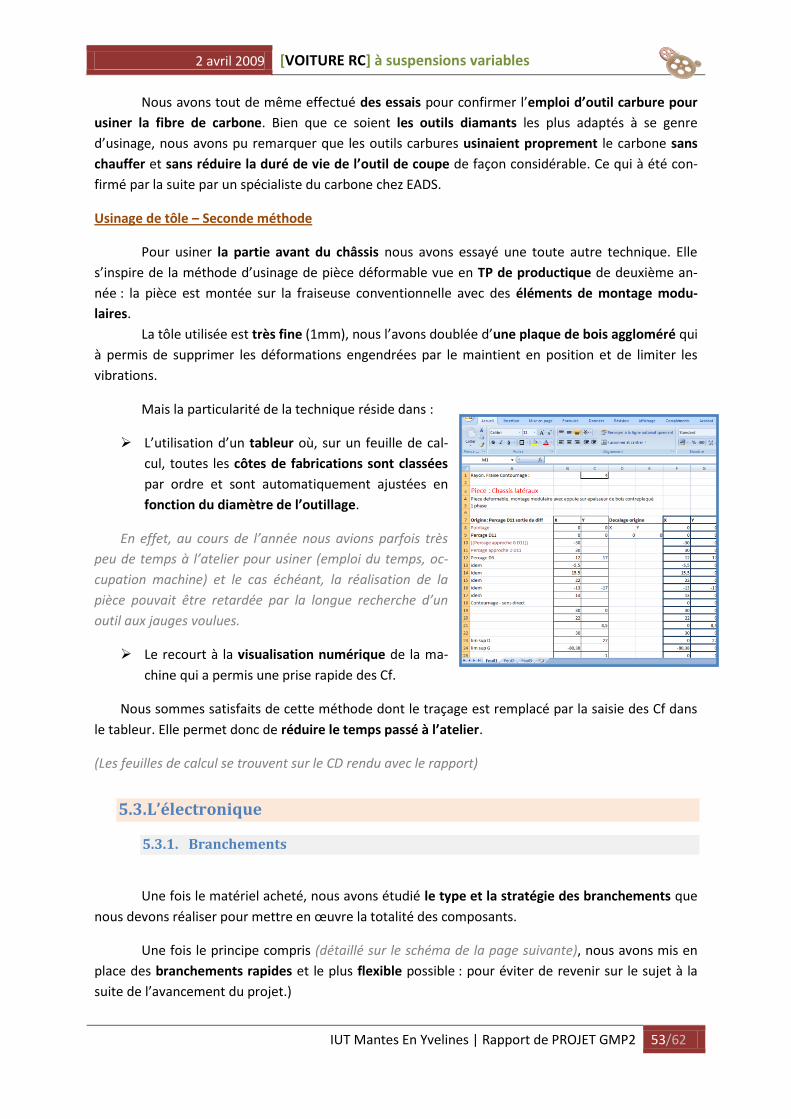
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 53/62
Nous avons tout de même effectué des essais pour confirmer l’emploi d’outil carbure pour
usiner la fibre de carbone. Bien que ce soient les outils diamants les plus adaptés à se genre
d’usinage, nous avons pu remarquer que les outils carbures usinaient proprement le carbone sans
chauffer et sans réduire la duré de vie de l’outil de coupe de façon considérable. Ce qui à été con-
firmé par la suite par un spécialiste du carbone chez EADS.
Usinage de tôle – Seconde méthode
Pour usiner la partie avant du châssis nous avons essayé une toute autre technique. Elle
s’inspire de la méthode d’usinage de pièce déformable vue en TP de productique de deuxième an-
née : la pièce est montée sur la fraiseuse conventionnelle avec des éléments de montage modu-
laires.
La tôle utilisée est très fine (1mm), nous l’avons doublée d’une plaque de bois aggloméré qui
à permis de supprimer les déformations engendrées par le maintient en position et de limiter les
vibrations.
Mais la particularité de la technique réside dans :
L’utilisation d’un tableur où, sur un feuille de cal-
cul, toutes les côtes de fabrications sont classées
par ordre et sont automatiquement ajustées en
fonction du diamètre de l’outillage.
En effet, au cours de l’année nous avions parfois très
peu de temps à l’atelier pour usiner (emploi du temps, oc-
cupation machine) et le cas échéant, la réalisation de la
pièce pouvait être retardée par la longue recherche d’un
outil aux jauges voulues.
Le recourt à la visualisation numérique de la ma-
chine qui a permis une prise rapide des Cf.
Nous sommes satisfaits de cette méthode dont le traçage est remplacé par la saisie des Cf dans
le tableur. Elle permet donc de réduire le temps passé à l’atelier.
(Les feuilles de calcul se trouvent sur le CD rendu avec le rapport)
5.3. L’électronique
5.3.1. Branchements
Une fois le matériel acheté, nous avons étudié le type et la stratégie des branchements que
nous devons réaliser pour mettre en œuvre la totalité des composants.
Une fois le principe compris (détaillé sur le schéma de la page suivante), nous avons mis en
place des branchements rapides et le plus flexible possible : pour éviter de revenir sur le sujet à la
suite de l’avancement du projet.)
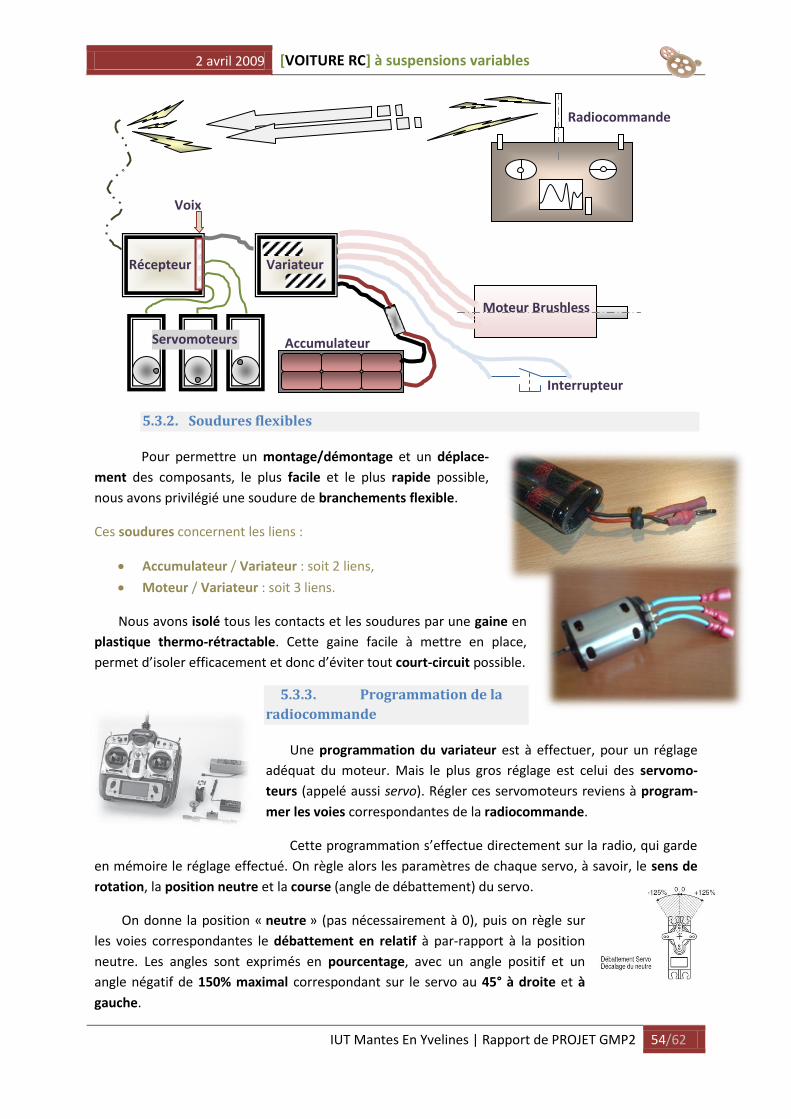
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 54/62
5.3.2. Soudures flexibles
Pour permettre un montage/démontage et un déplace-
ment des composants, le plus facile et le plus rapide possible,
nous avons privilégié une soudure de branchements flexible.
Ces soudures concernent les liens :
Accumulateur / Variateur : soit 2 liens,
Moteur / Variateur : soit 3 liens.
Nous avons isolé tous les contacts et les soudures par une gaine en
plastique thermo-rétractable. Cette gaine facile à mettre en place,
permet d’isoler efficacement et donc d’éviter tout court-circuit possible.
5.3.3. Programmation de la
radiocommande
Une programmation du variateur est à effectuer, pour un réglage
adéquat du moteur. Mais le plus gros réglage est celui des servomo-
teurs (appelé aussi servo). Régler ces servomoteurs reviens à program-
mer les voies correspondantes de la radiocommande.
Cette programmation s’effectue directement sur la radio, qui garde
en mémoire le réglage effectué. On règle alors les paramètres de chaque servo, à savoir, le sens de
rotation, la position neutre et la course (angle de débattement) du servo.
On donne la position « neutre » (pas nécessairement à 0), puis on règle sur
les voies correspondantes le débattement en relatif à par-rapport à la position
neutre. Les angles sont exprimés en pourcentage, avec un angle positif et un
angle négatif de 150% maximal correspondant sur le servo au 45° à droite et à
gauche.
Variateur
Moteur Brushless
Interrupteur
Radiocommande
Récepteur
Servomoteurs Accumulateur
Voix
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 55/62
6. Critiques d’anticipation
6.1. Recul sur la première moitié du projet (janvier 2009)
Ce début d’année nous a permis de définir précisément la structure qu’aura notre voiture,
d’obtenir les éléments importants que nous ne fabriquerons pas, de même que de tester les procé-
dés que nous allons utiliser pour produire nos pièces.
Nous sommes plutôt satisfait de l’avancement du projet, malgré les quelques difficultés que
nous avons rencontrées lors de la réalisation. Des difficultés qui nous serons que bénéfique par la
suite : C’est avec ces aléas que nous forgeons notre expérience.
6.2. Objectif pour la deuxième moitié du projet
Nous comptons stabiliser dans un très court délai l’aspect CAO de notre projet afin de disposer
du temps nécessaire à la fabrication de toutes les pièces, de leur assemblage et de leur correction si
nécessaire.
Tout ceci nous laisse septique quant à l’achèvement du projet car nous sommes conscients de la
quantité de travail qui reste à fournir dans un temps qui ne sera que trop court.
Cette deuxième partie du projet sera donc essentiellement de la production, avec tout de même
en parallèle la fin de cette étude d’avant projet qui se conclura très rapidement.
6.3. Recul sur la deuxième moitié du projet
Au 2 avril 2009, nous venons d’assembler notre véhicule et malgré quelques imperfections nous
sommes satisfaits du résultat. Nous espérons faire fonctionner la chaîne de transmission et
l’ajustement de la garde au sol le jour de la soutenance, si ce n’est de carrément faire rouler la voi-
ture !
Nous avons mené ce projet en parallèle de nos cours en 7 mois et même si le résultat est impar-
fait nous en sommes fiers car pour l’obtenir nous nous sommes donnés sans compter. Au-delà de
tout sentimentalisme, à l’heure qu’il est, il est honnêtement impossible d’avoir du recule sur notre
projet car il ne se terminera vraiment que le jour de la soutenance.
Un aperçu de la voiture finale est imprimé en fin des annexes.
Pour que la voiture soit complète il faut fabriquer la coque et le pare choque (la voiture a été
conçue avec toutes les liaisons nécessaires). Ce pourrait être un projet de GMP1.
NOUS REMERCIONS TRES CHALEUREUSEMENT M.BROSSARD ET M.LAFFITTE QUI NOUS
ONT ETE D’UNE AIDE INDISPENSABLE.
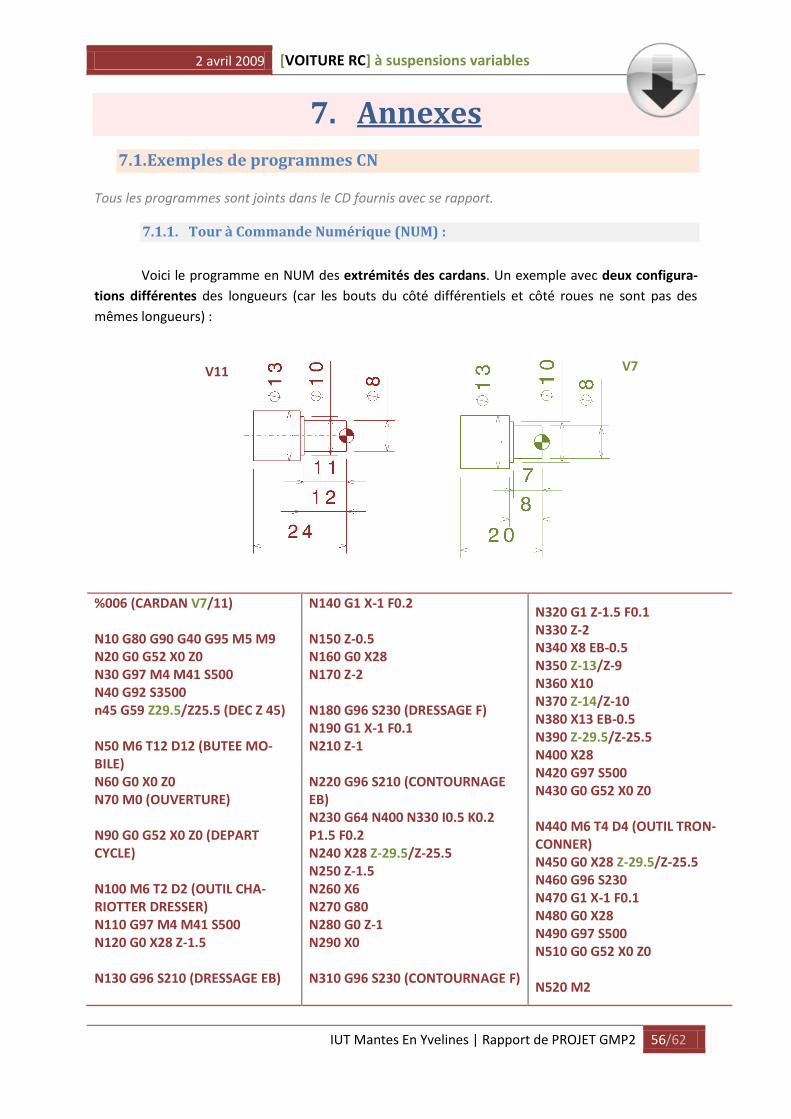
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 56/62
7. Annexes
7.1. Exemples de programmes CN
Tous les programmes sont joints dans le CD fournis avec se rapport.
7.1.1. Tour à Commande Numérique (NUM) :
Voici le programme en NUM des extrémités des cardans. Un exemple avec deux configura-
tions différentes des longueurs (car les bouts du côté différentiels et côté roues ne sont pas des
mêmes longueurs) :
%006 (CARDAN V7/11) N10 G80 G90 G40 G95 M5 M9 N20 G0 G52 X0 Z0 N30 G97 M4 M41 S500 N40 G92 S3500 n45 G59 Z29.5/Z25.5 (DEC Z 45) N50 M6 T12 D12 (BUTEE MO-BILE) N60 G0 X0 Z0 N70 M0 (OUVERTURE) N90 G0 G52 X0 Z0 (DEPART CYCLE) N100 M6 T2 D2 (OUTIL CHA-RIOTTER DRESSER) N110 G97 M4 M41 S500 N120 G0 X28 Z-1.5 N130 G96 S210 (DRESSAGE EB)
N140 G1 X-1 F0.2 N150 Z-0.5 N160 G0 X28 N170 Z-2 N180 G96 S230 (DRESSAGE F) N190 G1 X-1 F0.1 N210 Z-1 N220 G96 S210 (CONTOURNAGE EB) N230 G64 N400 N330 I0.5 K0.2 P1.5 F0.2 N240 X28 Z-29.5/Z-25.5 N250 Z-1.5 N260 X6 N270 G80 N280 G0 Z-1 N290 X0 N310 G96 S230 (CONTOURNAGE F)
N320 G1 Z-1.5 F0.1 N330 Z-2 N340 X8 EB-0.5 N350 Z-13/Z-9 N360 X10 N370 Z-14/Z-10 N380 X13 EB-0.5 N390 Z-29.5/Z-25.5 N400 X28 N420 G97 S500 N430 G0 G52 X0 Z0 N440 M6 T4 D4 (OUTIL TRON-CONNER) N450 G0 X28 Z-29.5/Z-25.5 N460 G96 S230 N470 G1 X-1 F0.1 N480 G0 X28 N490 G97 S500 N510 G0 G52 X0 Z0 N520 M2
V11 V7
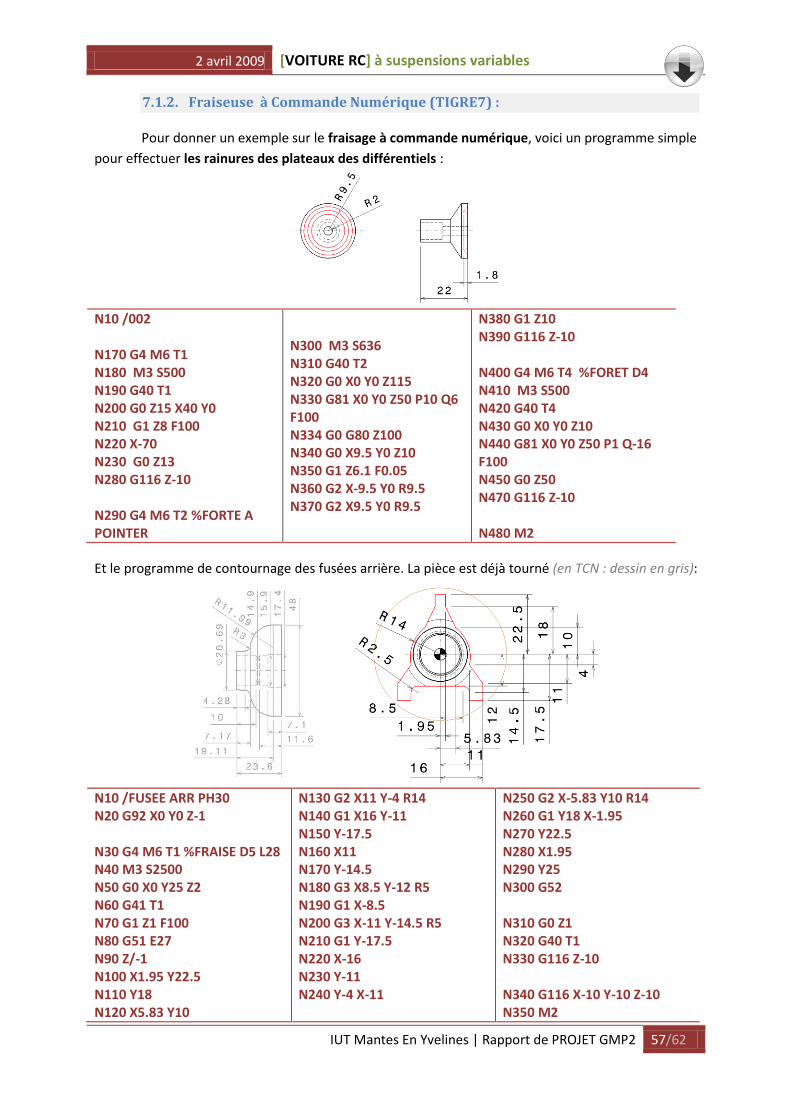
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 57/62
7.1.2. Fraiseuse à Commande Numérique (TIGRE7) :
Pour donner un exemple sur le fraisage à commande numérique, voici un programme simple
pour effectuer les rainures des plateaux des différentiels :
N10 /002 N170 G4 M6 T1 N180 M3 S500 N190 G40 T1 N200 G0 Z15 X40 Y0 N210 G1 Z8 F100 N220 X-70 N230 G0 Z13 N280 G116 Z-10 N290 G4 M6 T2 %FORTE A POINTER
N300 M3 S636 N310 G40 T2 N320 G0 X0 Y0 Z115 N330 G81 X0 Y0 Z50 P10 Q6 F100 N334 G0 G80 Z100 N340 G0 X9.5 Y0 Z10 N350 G1 Z6.1 F0.05 N360 G2 X-9.5 Y0 R9.5 N370 G2 X9.5 Y0 R9.5
N380 G1 Z10 N390 G116 Z-10 N400 G4 M6 T4 %FORET D4 N410 M3 S500 N420 G40 T4 N430 G0 X0 Y0 Z10 N440 G81 X0 Y0 Z50 P1 Q-16 F100 N450 G0 Z50 N470 G116 Z-10 N480 M2
Et le programme de contournage des fusées arrière. La pièce est déjà tourné (en TCN : dessin en gris):
N10 /FUSEE ARR PH30 N20 G92 X0 Y0 Z-1 N30 G4 M6 T1 %FRAISE D5 L28 N40 M3 S2500 N50 G0 X0 Y25 Z2 N60 G41 T1 N70 G1 Z1 F100 N80 G51 E27 N90 Z/-1 N100 X1.95 Y22.5 N110 Y18 N120 X5.83 Y10
N130 G2 X11 Y-4 R14 N140 G1 X16 Y-11 N150 Y-17.5 N160 X11 N170 Y-14.5 N180 G3 X8.5 Y-12 R5 N190 G1 X-8.5 N200 G3 X-11 Y-14.5 R5 N210 G1 Y-17.5 N220 X-16 N230 Y-11 N240 Y-4 X-11
N250 G2 X-5.83 Y10 R14 N260 G1 Y18 X-1.95 N270 Y22.5 N280 X1.95 N290 Y25 N300 G52 N310 G0 Z1 N320 G40 T1 N330 G116 Z-10 N340 G116 X-10 Y-10 Z-10 N350 M2
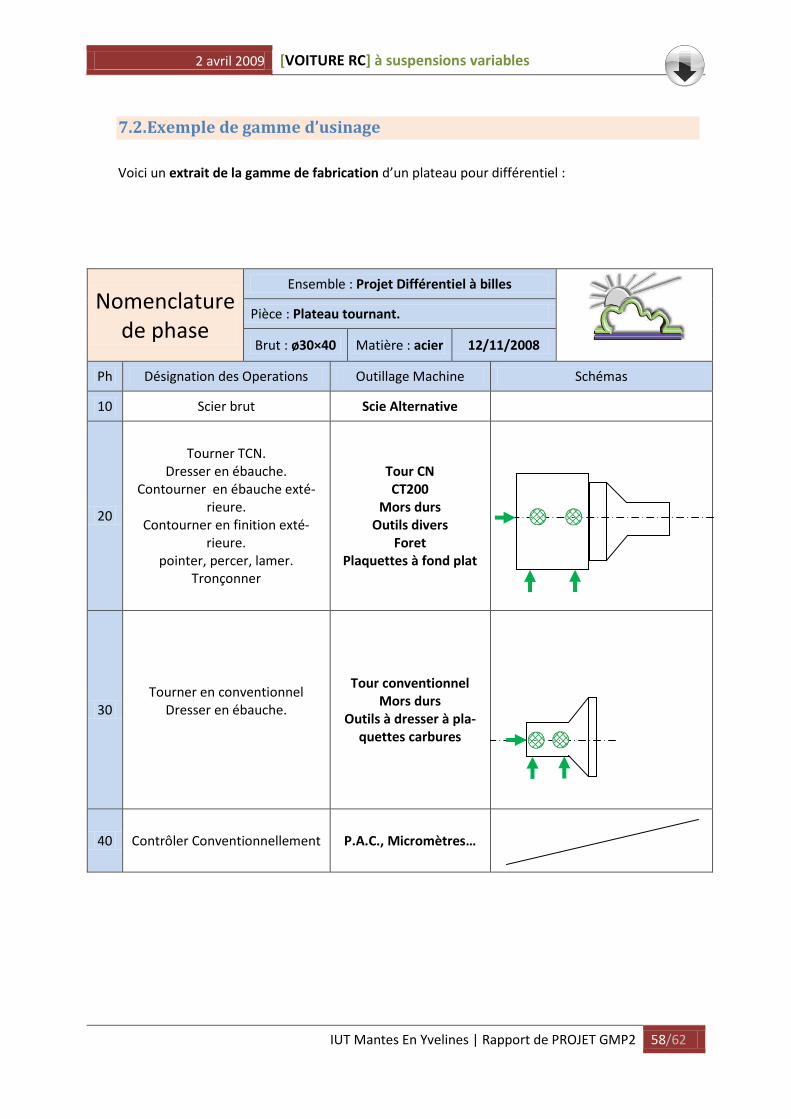
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 58/62
7.2. Exemple de gamme d’usinage
Voici un extrait de la gamme de fabrication d’un plateau pour différentiel :
Nomenclature de phase
Ensemble : Projet Différentiel à billes
Pièce : Plateau tournant.
Brut : ø30×40 Matière : acier 12/11/2008
Ph Désignation des Operations Outillage Machine Schémas
10 Scier brut Scie Alternative
20
Tourner TCN. Dresser en ébauche.
Contourner en ébauche exté-rieure.
Contourner en finition exté-rieure.
pointer, percer, lamer. Tronçonner
Tour CN CT200
Mors durs Outils divers
Foret Plaquettes à fond plat
30 Tourner en conventionnel
Dresser en ébauche.
Tour conventionnel Mors durs
Outils à dresser à pla-quettes carbures
40 Contrôler Conventionnellement P.A.C., Micromètres…
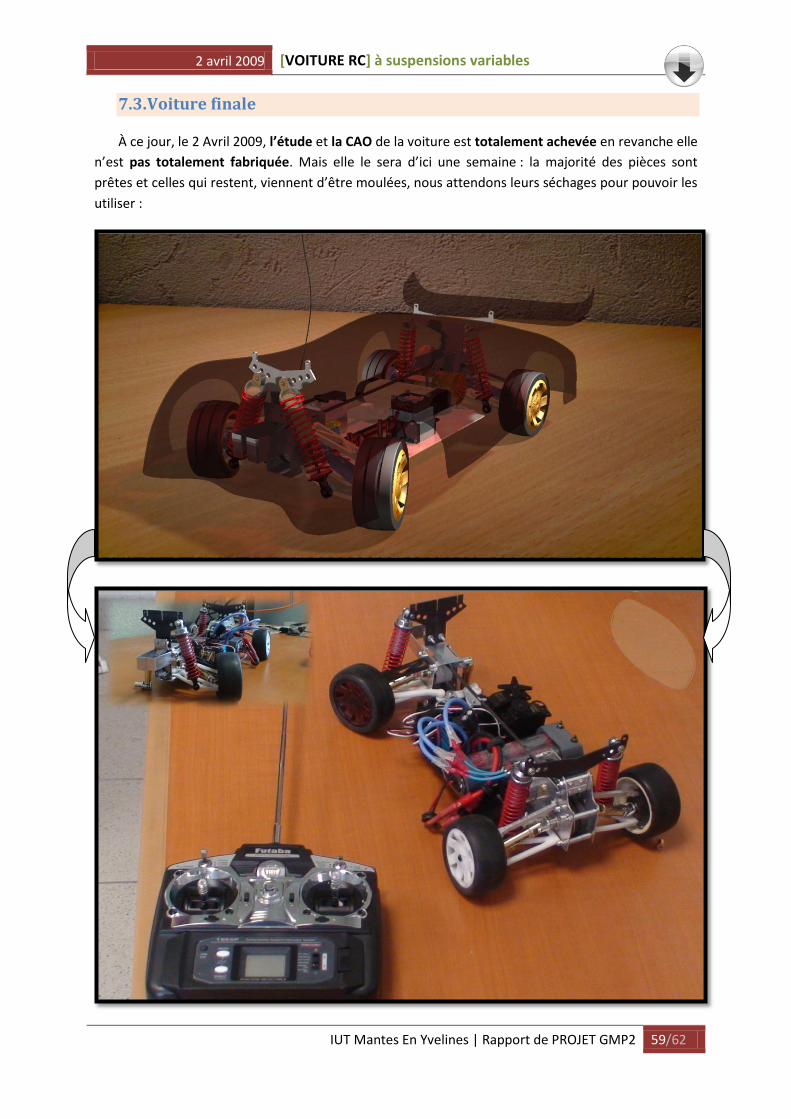
2 avril 2009 [VOITURE RC] à suspensions variables
IUT Mantes En Yvelines | Rapport de PROJET GMP2 59/62
7.3. Voiture finale
À ce jour, le 2 Avril 2009, l’étude et la CAO de la voiture est totalement achevée en revanche elle
n’est pas totalement fabriquée. Mais elle le sera d’ici une semaine : la majorité des pièces sont
prêtes et celles qui restent, viennent d’être moulées, nous attendons leurs séchages pour pouvoir les
utiliser :
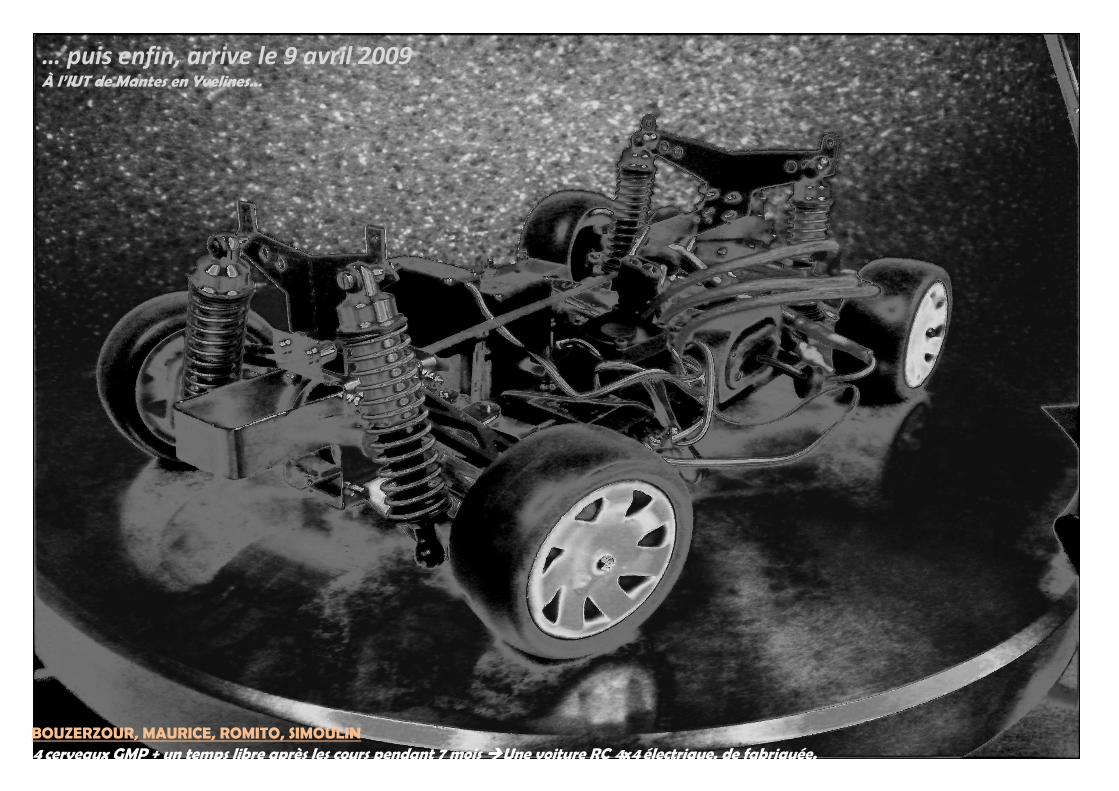
BOUZERZOUR, MAURICE, ROMITO, SIMOULIN
4 cerveaux GMP + un temps libre après les cours pendant 7 mois Une voiture RC 4x4 électrique. de fabriquée.
À l’IUT de Mantes en Yvelines… … puis enfin, arrive le 9 avril 2009