actions mécaniques - meefi.pedagogie.ec-nantes.fr · analyse des liaisons mécaniques liaisons...
TRANSCRIPT
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
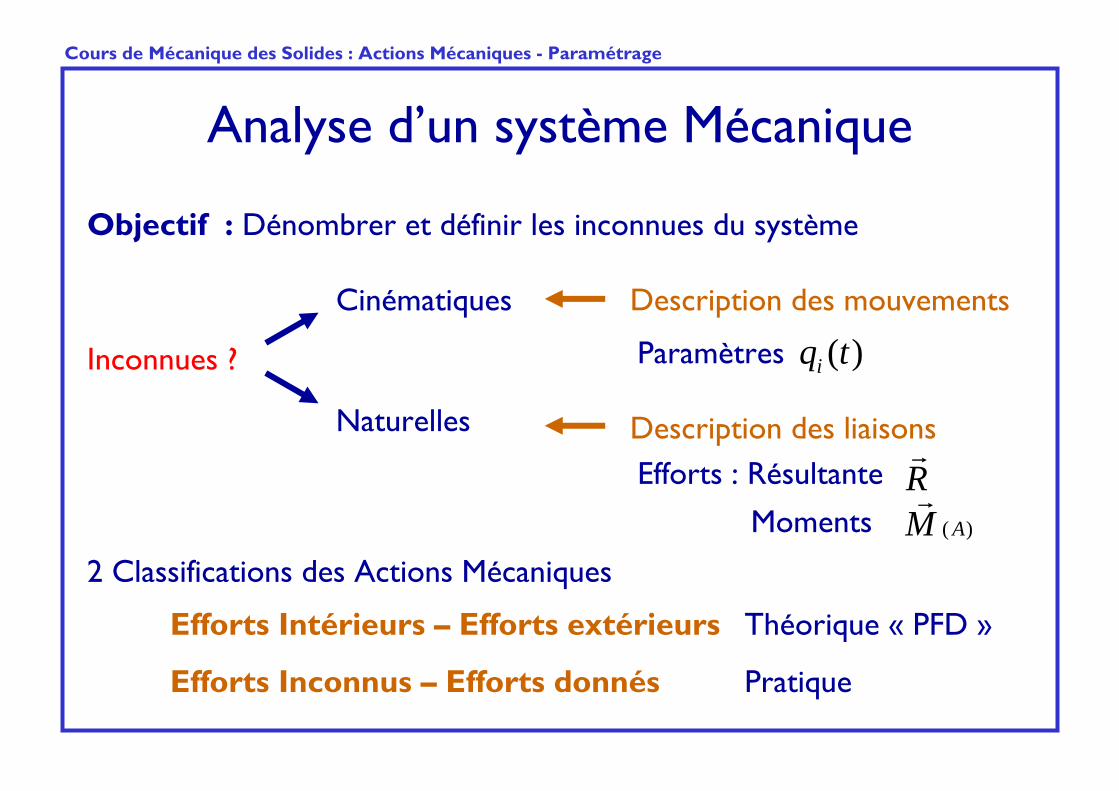
Analyse d’un système Mécanique
Objectif : Dénombrer et définir les inconnues du système
Inconnues ?
Description des mouvements
( )iq tParamètres
Cinématiques
Description des liaisonsEfforts : Résultante
Moments
Naturelles
R( )AM
2 Classifications des Actions Mécaniques
Efforts Intérieurs – Efforts extérieurs Théorique « PFD »
Efforts Inconnus – Efforts donnés Pratique
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
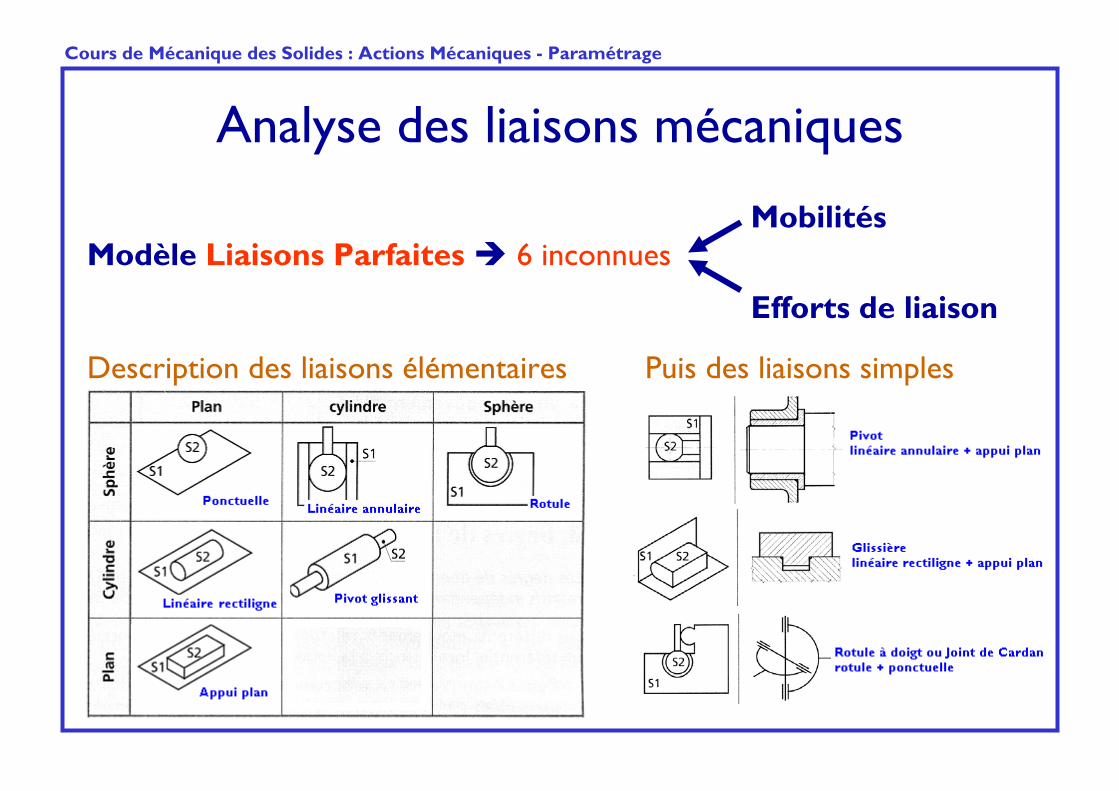
Analyse des liaisons mécaniques
Modèle Liaisons Parfaites 6 inconnuesMobilités
Efforts de liaison
Description des liaisons élémentaires Puis des liaisons simples
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
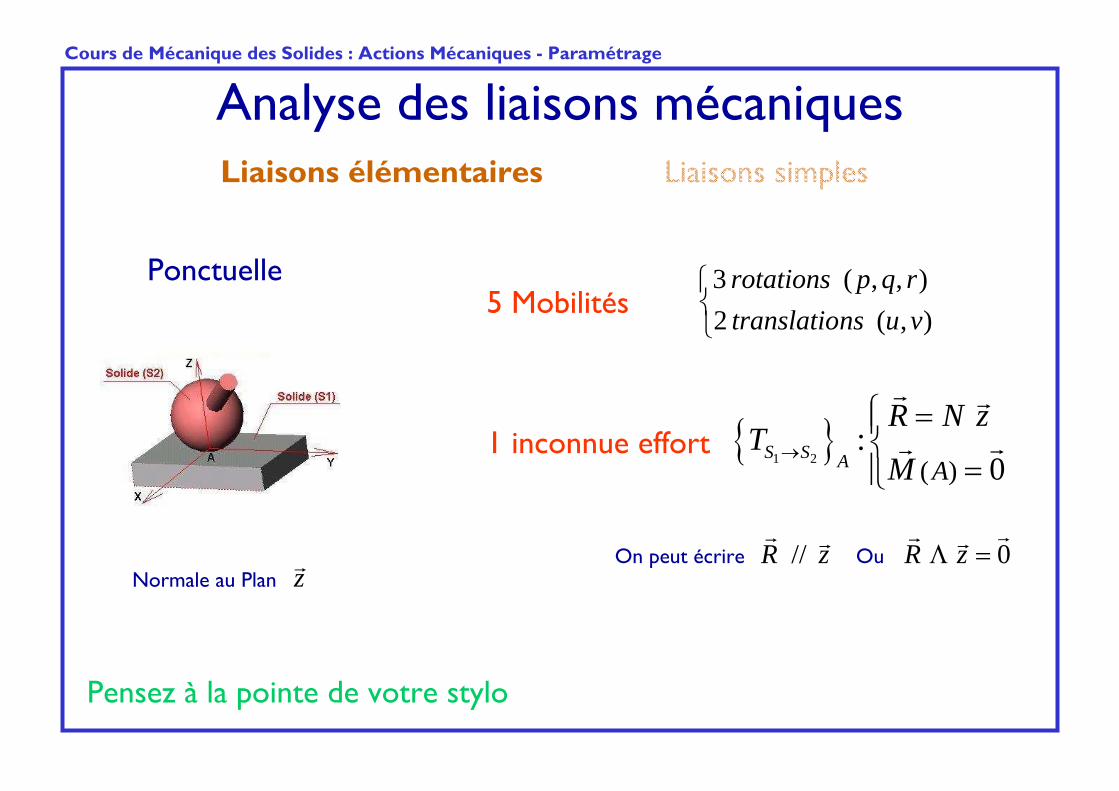
Analyse des liaisons mécaniques Liaisons élémentaires Liaisons simples
Ponctuelle
{ }1 2 ( ):
0 S S A A
R N zT
M→
⎧ =⎪⎨
=⎪⎩
5 Mobilités ⎩⎨⎧
),( 2),,( 3
vunstranslatiorqprotations
1 inconnue effort
On peut écrire // R z Ou 0R zΛ =Normale au Plan z
Pensez à la pointe de votre stylo

Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
Analyse des liaisons mécaniques Liaisons élémentaires Liaisons simples
Rectiligne
{ }1 2 ( )
:
S S AAA
R N zT
M M x→
⎧ =⎪⎨
=⎪⎩
4 Mobilités 2 ( , )2 ( , )
rotations q rtranslations u v
⎧⎨⎩
2 inconnues effort
On peut écrire 0AM xΛ =Normale au Plan z
Direction de l’appui y Ou
A
A
M zM y⎧ ⊥⎪⎨
⊥⎪⎩Une règle dont l’arrête est en contact avec la table
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
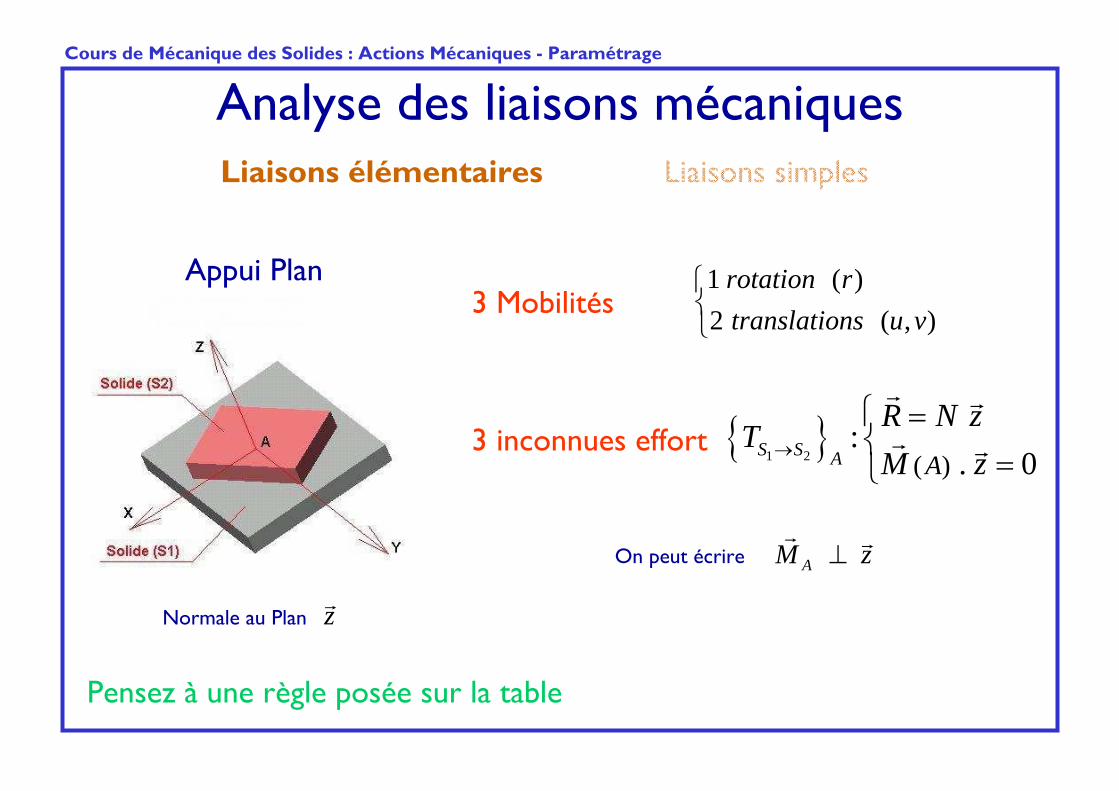
Analyse des liaisons mécaniques Liaisons élémentaires Liaisons simples
Appui Plan
{ }1 2 ( )
:. 0 S S A A
R N zTM z→
⎧ =⎨
=⎩
3 Mobilités 1 ( )2 ( , )
rotation rtranslations u v
⎧⎨⎩
3 inconnues effort
On peut écrire AM z⊥
Normale au Plan z
Pensez à une règle posée sur la table
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
Analyse des liaisons mécaniques Liaisons élémentaires Liaisons simples
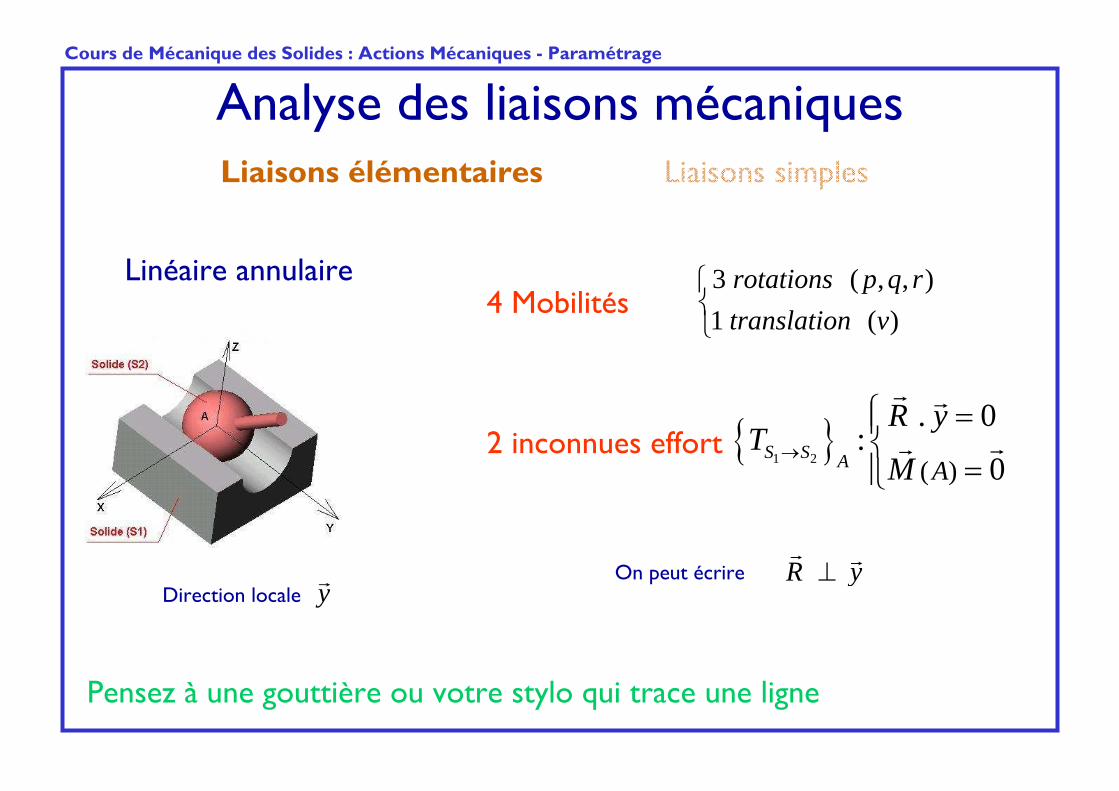
Linéaire annulaire
{ }1 2 ( )
. 0:
0 S S A A
R yT
M→
⎧ =⎪⎨
=⎪⎩
4 Mobilités 3 ( , , )1 ( )
rotations p q rtranslation v
⎧⎨⎩
2 inconnues effort
On peut écrire R y⊥Direction locale y
Pensez à une gouttière ou votre stylo qui trace une ligne
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
Analyse des liaisons mécaniques Liaisons élémentaires Liaisons simples
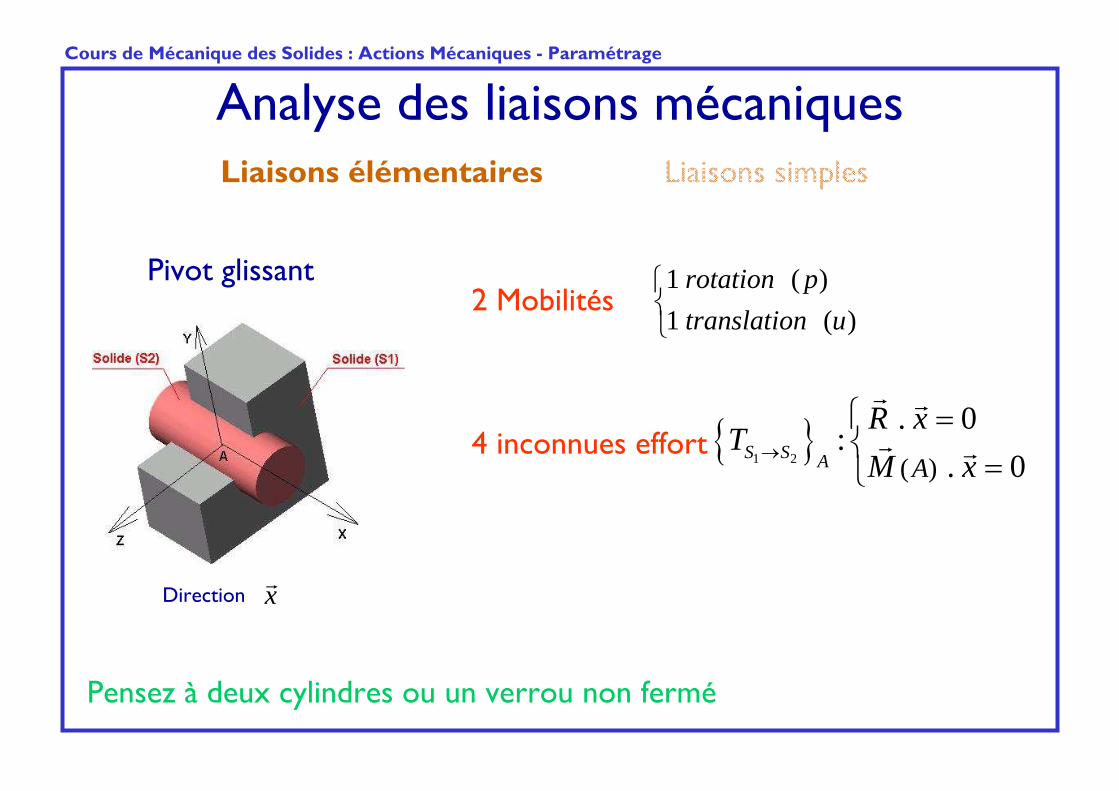
Pivot glissant
{ }1 2 ( )
. 0:. 0 S S A A
R xTM x→
⎧ =⎨
=⎩
2 Mobilités 1 ( )1 ( )
rotation ptranslation u
⎧⎨⎩
4 inconnues effort
Direction x
Pensez à deux cylindres ou un verrou non fermé
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
Analyse des liaisons mécaniques Liaisons élémentaires Liaisons simples
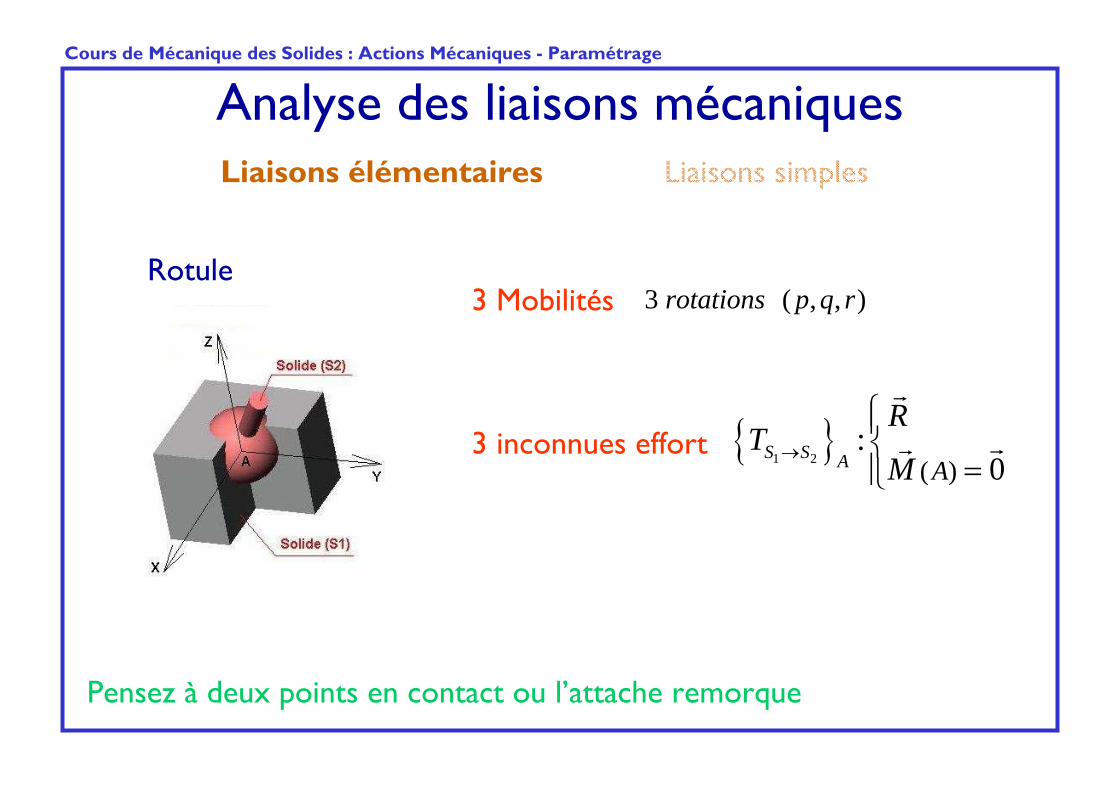
Rotule
{ }1 2 ( )
:
0 S S A A
RT
M→
⎧⎪⎨
=⎪⎩
3 Mobilités 3 ( , , )rotations p q r
3 inconnues effort
Pensez à deux points en contact ou l’attache remorque
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
Analyse des liaisons mécaniques Liaisons élémentaires Liaisons simples
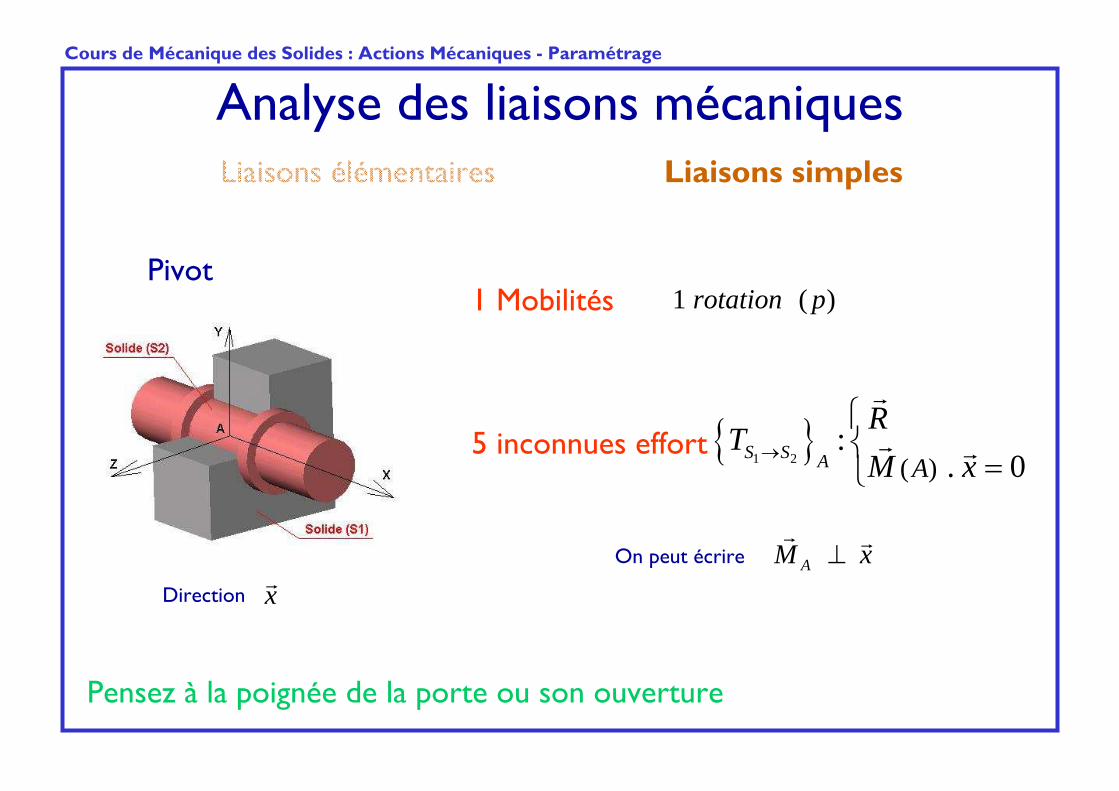
Pivot
{ }1 2 ( ):
. 0 S S A A
RTM x→
⎧⎨
=⎩
1 Mobilités
5 inconnues effort
Direction x
Pensez à la poignée de la porte ou son ouverture
1 ( )rotation p
On peut écrire AM x⊥
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
Analyse des liaisons mécaniques Liaisons élémentaires Liaisons simples
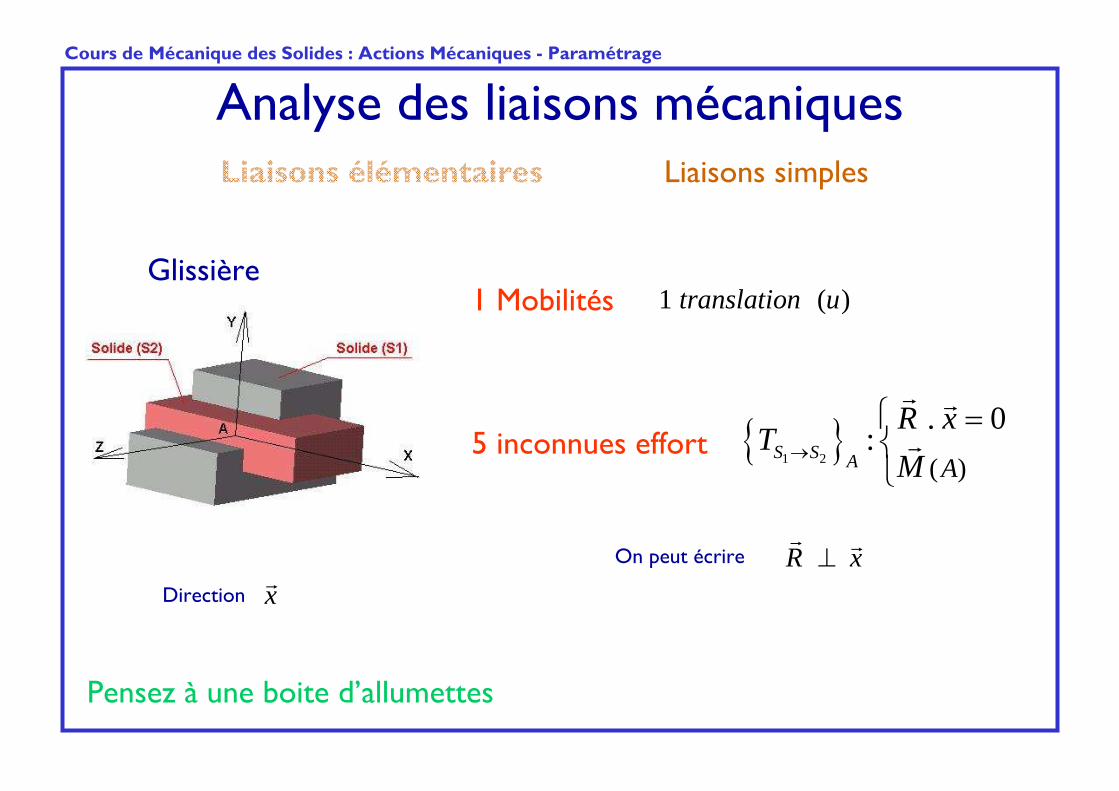
Glissière
{ }1 2 ( )
. 0:S S A A
R xTM→
⎧ =⎨⎩
1 Mobilités
5 inconnues effort
Direction x
Pensez à une boite d’allumettes
1 ( )translation u
On peut écrire R x⊥
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
Paramétrage Objectif : Définir les mouvements du système ),( tqfOP i= P∀ ∈Σ
Hyperstatisme Liaison cinématiquement équivalente
Nombre de paramètres indépendants ( )tiq
Système matériel : ensemble de N solides
Penser en Mobilités ou Efforts inconnus « p »( , ) 0if q t =Liaison : « p » relations de la forme
6N paramètres primitifs
Démarche
Description des liaisons
Dénombrer les liaisons indépendantes
Choix des paramètres
Angles d’EulerDéfinir l’orientation des solides avant tout
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
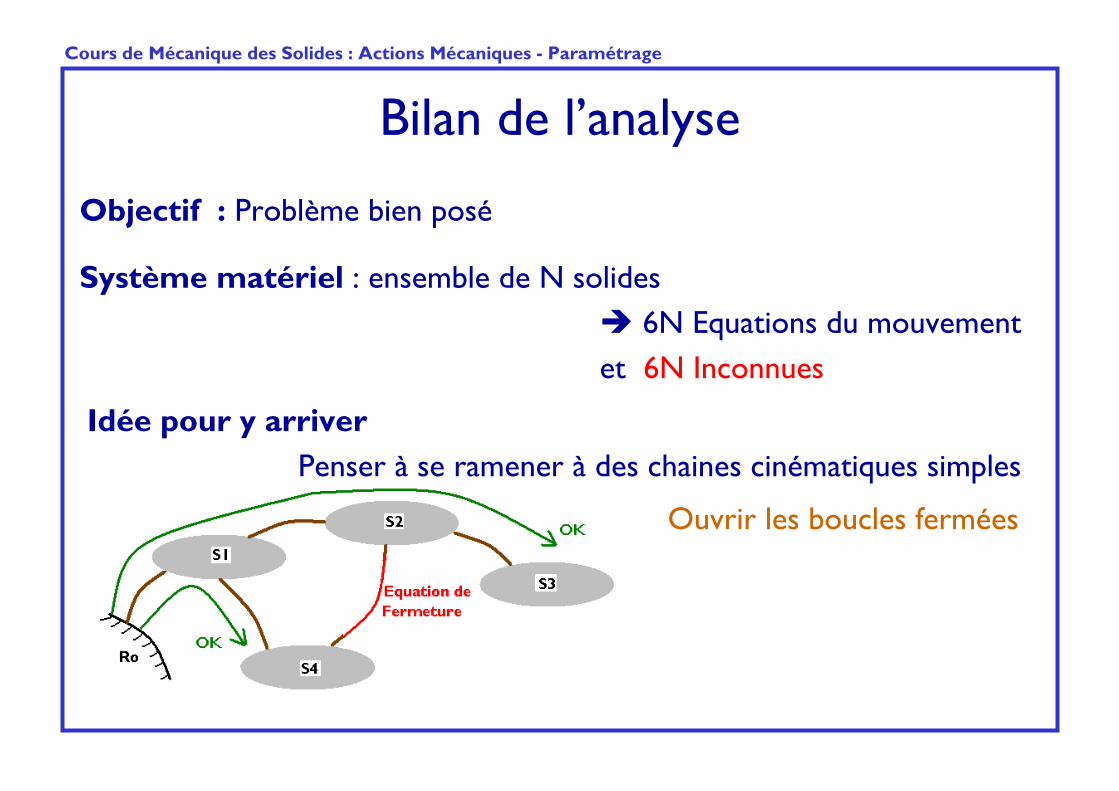
Bilan de l’analyse
Objectif : Problème bien posé
Système matériel : ensemble de N solides 6N Equations du mouvement
Penser à se ramener à des chaines cinématiques simples
et 6N Inconnues
Idée pour y arriver
Ouvrir les boucles fermées
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
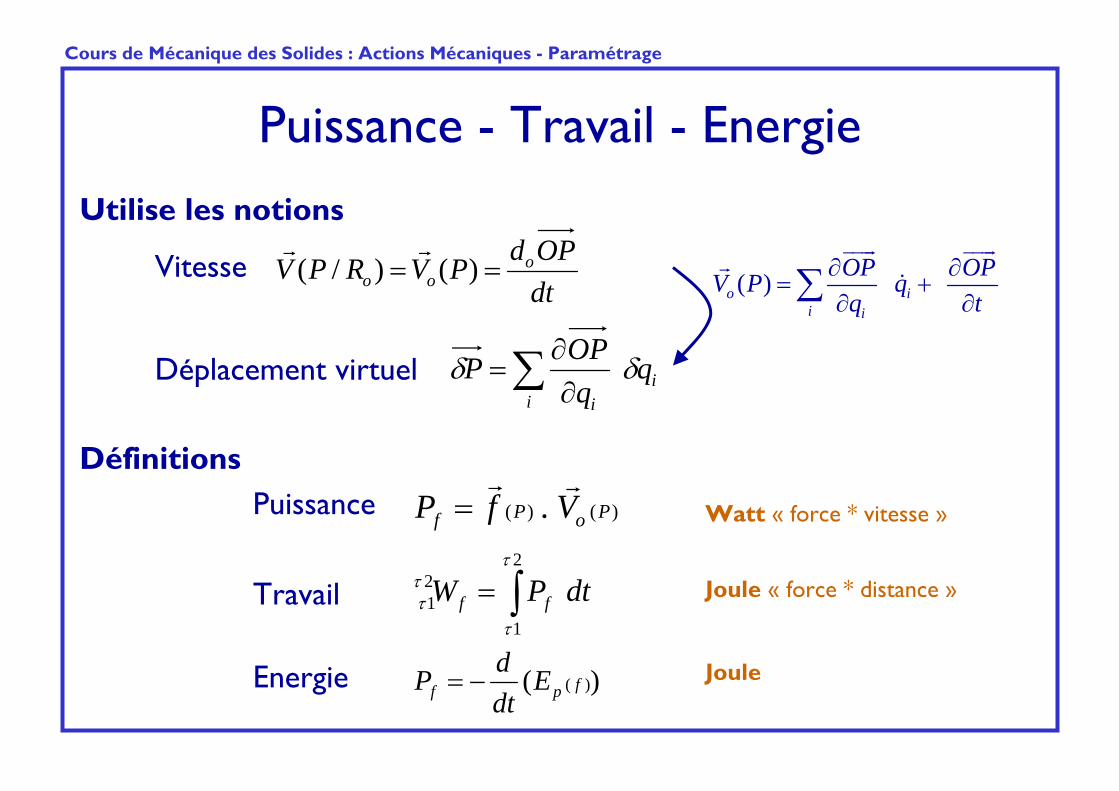
Puissance - Travail - Energie
Utilise les notions
VitessedtOPdPVRPV o
oo == )()/(
Déplacement virtuel ∑ ∂∂
=i
ii
OPP δδ
( ) o ii i
OP OPV P qq t
∂ ∂= +
∂ ∂∑
Définitions
( ) ( ). P Pf oP f V=Puissance Watt « force * vitesse »
221
1f fW P dt
τττ
τ
= ∫Travail Joule « force * distance »
Energie )( )( fpf EdtdP −= Joule
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
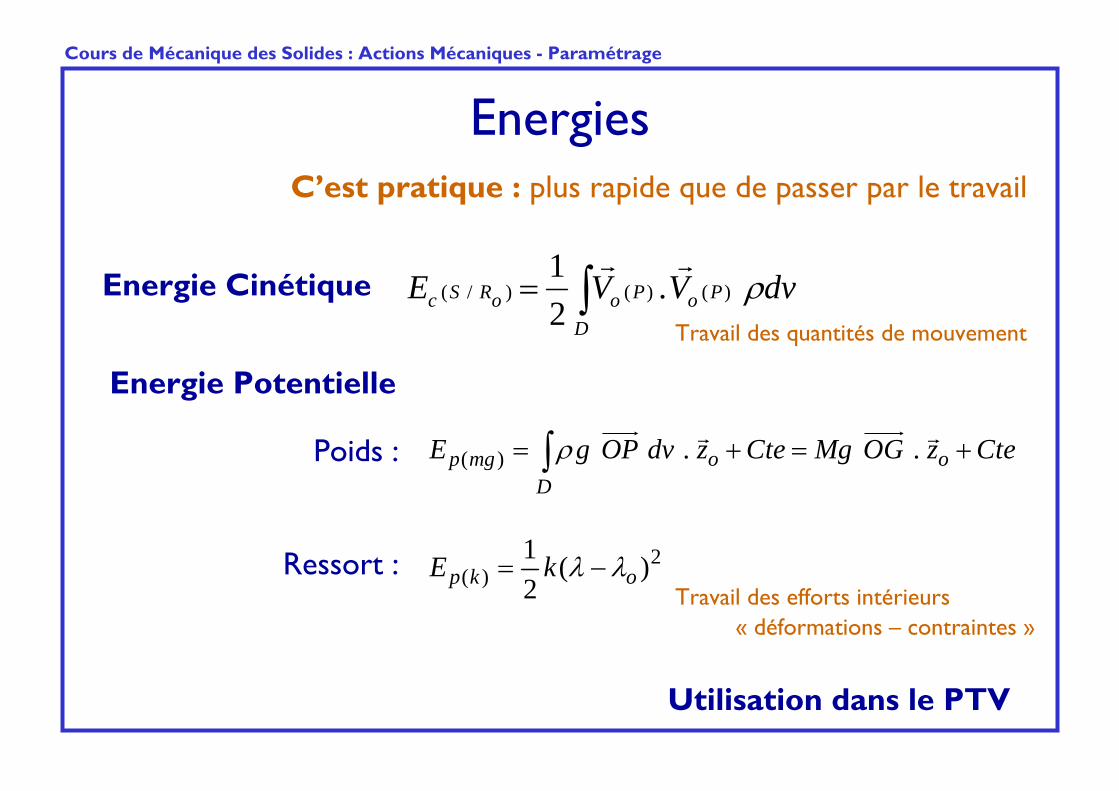
Energies C’est pratique : plus rapide que de passer par le travail
Energie Cinétique dvVVE PoD
PooRSc ρ )()()/( . 21∫=
Travail des quantités de mouvement
Poids :
Energie Potentielle
( ) . . p mg o oD
E g OP dv z Cte Mg OG z Cteρ= + = +∫
Ressort : 2( )
1 ( )2p k oE k λ λ= −
Travail des efforts intérieurs« déformations – contraintes »
Utilisation dans le PTV
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
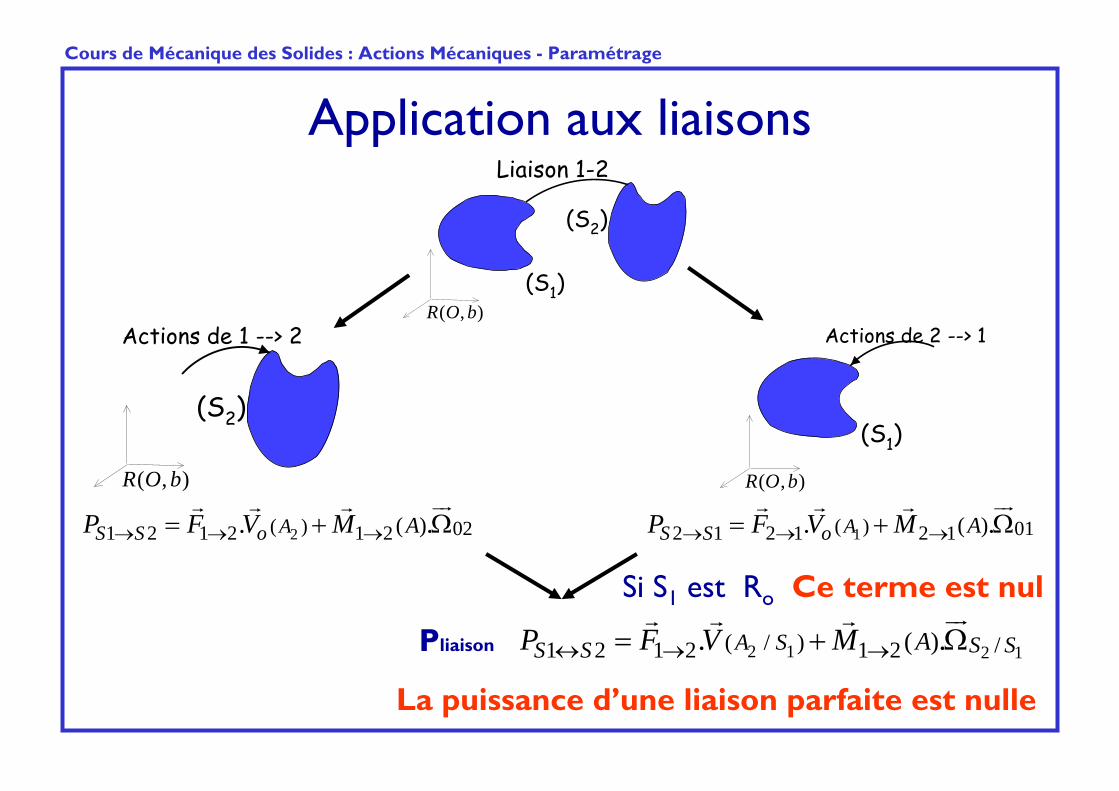
Application aux liaisons
La puissance d’une liaison parfaite est nulle
),( bOR
Liaison 1-2
(S1)
(S2)
Actions de 1 --> 2
),( bOR
(S2)
2( ) 021 2 1 2 1 2 ( ). .AS S o AP F V M→ → →= + Ω
(S1)
),( bOR
Actions de 2 --> 1
1( ) 012 1 2 1 2 1( ). .AS S o AP F V M→ → →= + Ω
Pliaison 2 1 2 1( / ) /1 2 1 2 1 2 ( ). .A S S SS S AP F V M↔ → →= + Ω
Si S1 est Ro Ce terme est nul
Cours de Mécanique des Solides : Actions Mécaniques - Paramétrage
Etudiez ce chapitre
Il faut connaître par cœur toutes les liaisons présentées ici
et savoir utiliser cette connaissance pour
Effectuer le paramétrage et l’analyse d’un système mécanique
Les exercices du polycopié de cours sont là pour vous aider.
A vous de jouer