5-td_mcc_descript_ge1_2008
TRANSCRIPT

5/9/2018 5-TD_MCC_Descript_GE1_2008 - slidepdf.com
http://slidepdf.com/reader/full/5-tdmccdescriptge12008 1/3
TD MCC Description et identification des procédés industriels GE1 Page 1/ 2
Ecole Nationale d’Ingénieurs de Sfax,Département de Génie Electrique
Identification de la réponse indicielle d’un moteur à Courant Continu
Figure 1. Schéma de commande d’un moteur à CC
On considère un moteur électrique commandé par l’induit (voir figure 1), dont son flux est
supposé constant. On notera R , L , J , f et ( )u t la résistance d’induit, l’inductance, l’inertie,
le frottement visqueux et la tension d’alimentation de ce moteur électrique, respectivement.
On considère les deux équations suivantes, qui régissent le moteur électrique considéré :
( )( ) w t e t K =
et
( ) ( )m t K i t Γ =
Où ( )e t est la force contre électromotrice f.c.e.m. du moteur, K est une constante, ( )w t est
la vitesse de rotation du moteur, ( )m t Γ est le couple moteur et ( )i t est le courant d’induit.
1) Ecrire les équations électrique et mécanique régissant le fonctionnement du moteur.
2) Représenter le schéma fonctionnel de la commande du moteur électrique considéré, en
faisant apparaître les différentes grandeurs (entrée ( )e t , sortie ( )w t ).
3) En supposant que les conditions initiales sont nulles pour toutes les variables de ce
moteur électrique et que la force contre électromotrice est supposée négligeable,
montrer qu’on peut décrire celui-ci par la fonction de transfert( )
( )( )
m
pF p
U p
Ω=
suivante :
( )( )( )
m
K F p
R Lp Jp f =
+ +
TD GE1 MCC
Description et identification des procédés industriels
5/9/2018 5-TD_MCC_Descript_GE1_2008 - slidepdf.com
http://slidepdf.com/reader/full/5-tdmccdescriptge12008 2/3
TD MCC Description et identification des procédés industriels GE1 Page 2/ 2
4) Donner les expressions du gain statique mG , de la constante de temps électrique eτ , de
la constante de temps mécanique mτ du moteur électrique.
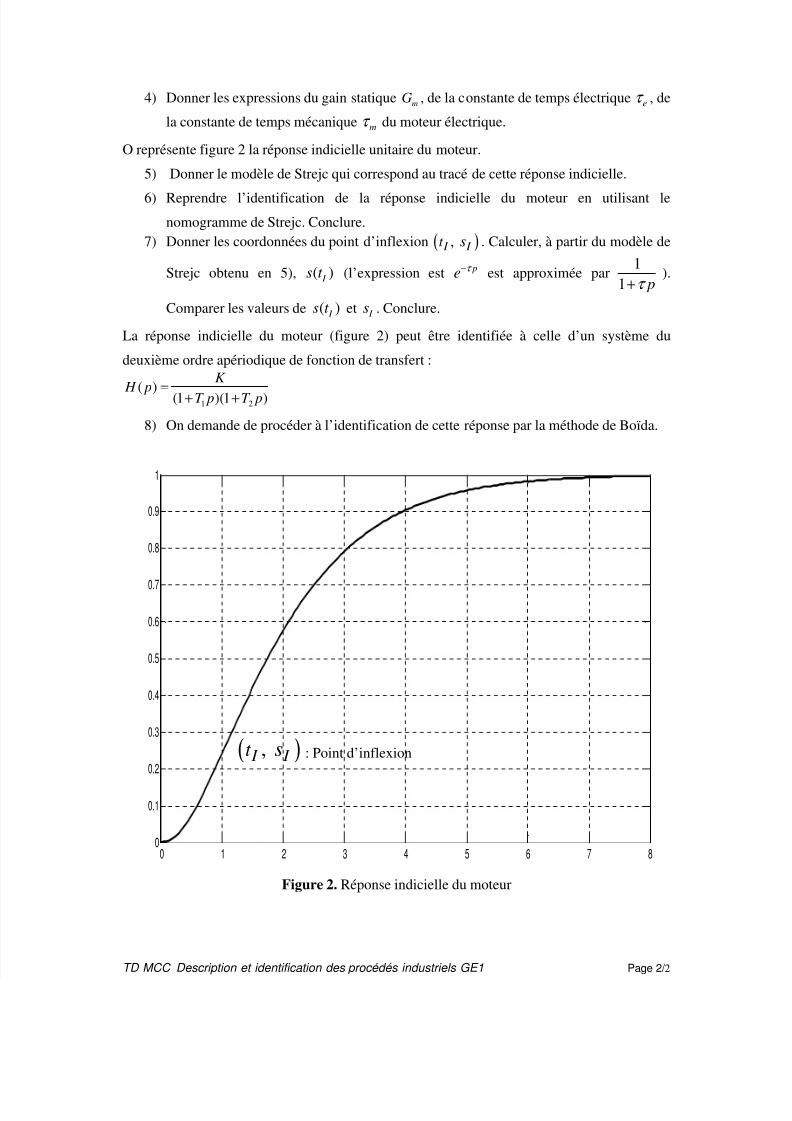
O représente figure 2 la réponse indicielle unitaire du moteur.
5) Donner le modèle de Strejc qui correspond au tracé de cette réponse indicielle.
6) Reprendre l’identification de la réponse indicielle du moteur en utilisant le
nomogramme de Strejc. Conclure.
7) Donner les coordonnées du point d’inflexion ( ), I I t s . Calculer, à partir du modèle de
Strejc obtenu en 5), ( ) I s t (l’expression est pe τ − est approximée par1
1 pτ +).
Comparer les valeurs de ( ) I s t et I s . Conclure.
La réponse indicielle du moteur (figure 2) peut être identifiée à celle d’un système du
deuxième ordre apériodique de fonction de transfert :
1 2( ) (1 )(1 )
K
H p T p T p=
+ +
8) On demande de procéder à l’identification de cette réponse par la méthode de Boïda.
Figure 2. Réponse indicielle du moteur
0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
( ), I I t s : Point d’inflexion

5/9/2018 5-TD_MCC_Descript_GE1_2008 - slidepdf.com
http://slidepdf.com/reader/full/5-tdmccdescriptge12008 3/3