5. déterminer la fonction de transfert en boucle fermée...
TRANSCRIPT
Devoir surveillé n°4 MPSI 5 janvier 2015 Page 1
MPSI Devoir surveillé de Sciences Industrielles pour l’Ingénieur n° 4
5 janvier 2015
Bonne année à tous!
Etude du système ABS.
Un freinage énergique provoque le blocage des roues dans leur mouvement de rotation par rapport au châssis. En conséquence, les roues glissent sur la route et il n’est plus possible de contrôler la trajectoire du véhicule. Le dispositif ABS est destiné à éviter ce phénomène (pour information : figure P2).
En l’absence de courant, les électrovannes de l’ABS autorisent le libre passage du liquide de frein depuis le maître cylindre jusqu’aux cylindres de frein des roues pour assurer le freinage normal. Dans le cas d’une régulation par ABS, les électrovannes sont excitées et permettent de moduler la pression au niveau des cylindres de roue. Lorsque le calculateur électronique détecte une anomalie de fonctionnement, l’ABS est déconnecté automatiquement et supprime l’alimentation électrique des électrovannes : la fonction freinage est opérationnelle mais sans contrôle de l’antiblocage. Selon le diagramme fonctionnel de l’ABS (figure P3), le calculateur définit la vitesse optimale de rotation des roues appelée vitesse cible. L’ABS réalise un asservissement de vitesse de chaque roue en modulant le courant émis vers l’électrovanne associée à chaque roue. Nous étudierons en premier le réglage et l’évaluation des performances de l’ABS et ensuite le détail de l’électrovanne. Partie I : Etude de l’ABS. 1. Quel est le rôle du dispositif ABS ? 2. Quelle est la variable asservie par le dispositif ABS ? 3. Quelle est la grandeur réglée par l’électrovanne dans le dispositif Mécatronic III ? 4. On considère que l’équation liant la pression de freinage P, l’action de contact tangentielle T de la route sur le pneu et la
vitesse angulaire Ω de la roue avec son disque de frein de moment d’inertie total J selon son axe de rotation est :
Ω=− ɺ.).( JPkTR p
où : pk est une constante et R le rayon de la roue.
L’électrovanne proportionnelle est assimilée à un système du premier ordre de constante de temps eτ et de gain ek−
entre le courant de commande et la pression de freinage. La traînée est considérée comme un effort perturbateur. Le calculateur est supposé fournir un courant de commande i proportionnel à l’écart entre la vitesse de consigne ΩC et la
vitesse de la roue Ω (gain ck ).
Compléter le schéma bloc du document-réponse de la fonction ABS entre la vitesse de consigne ΩC et la vitesse de la roue Ω.
Devoir surveillé n°4 MPSI 5 janvier 2015 Page 2
5. Déterminer la fonction de transfert en boucle fermée pour T = 0.
RkkkJpp
Rkkk
p
ppH
pece
pec
C ++=
ΩΩ=
)1()()(
)(τ
Mettre cette fonction de transfert sous la forme canonique.
6. Déterminer la valeur que doit prendre le gain de commande du calculateur ck exprimé en fonction de
Ret ,,, Jkk peeτ , pour que la fonction ABS soit réalisée avec un amortissement égal à 0,7. Pourquoi choisir cette
valeur ? 7. On définit la précision par l’écart statique donné par l’expression :
)(lim )()( ttCt
S Ω−Ω=∞→
ε pour T = 0.
Déterminer pour une entrée échelon d’amplitude Ω0, la valeur de l’écart statique.
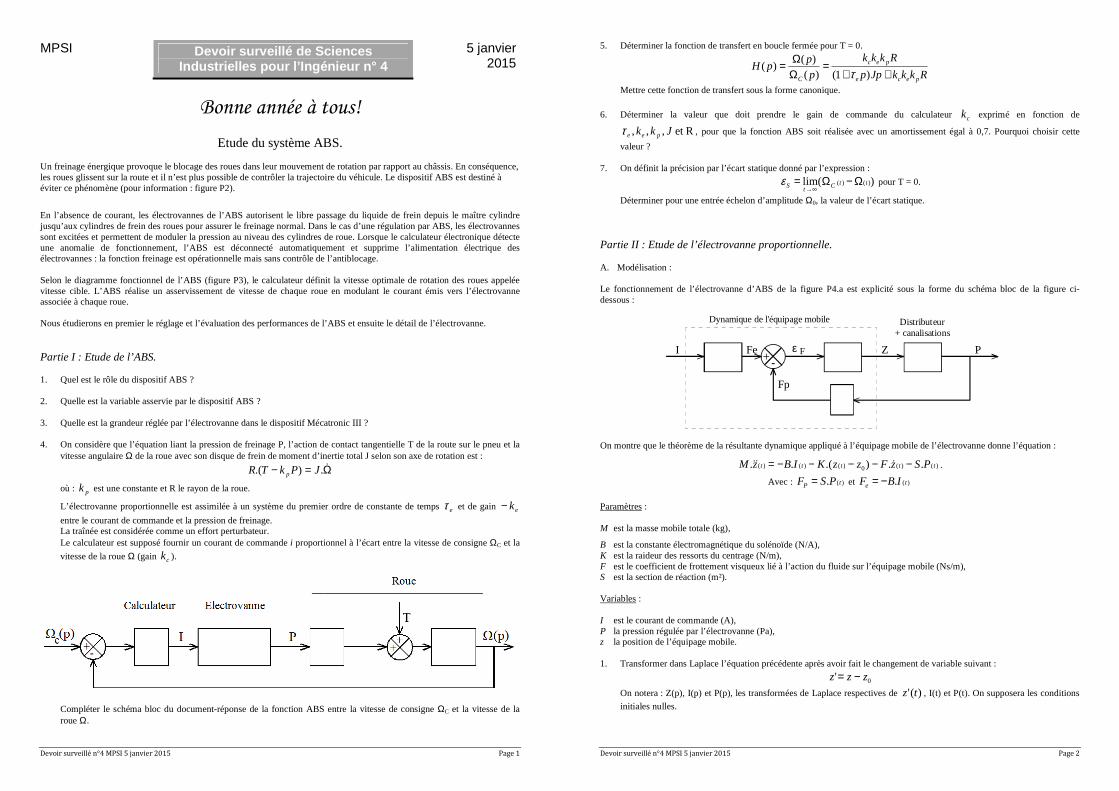
Partie II : Etude de l’électrovanne proportionnelle. A. Modélisation : Le fonctionnement de l’électrovanne d’ABS de la figure P4.a est explicité sous la forme du schéma bloc de la figure ci-dessous :
On montre que le théorème de la résultante dynamique appliqué à l’équipage mobile de l’électrovanne donne l’équation :
)()(0)()()( ..).(.. ttttt PSzFzzKIBzM −−−−−= ɺɺɺ .
Avec : ( ). tPF S P= et ( ). teF B I= −
Paramètres : M est la masse mobile totale (kg),
B est la constante électromagnétique du solénoïde (N/A), K est la raideur des ressorts du centrage (N/m), F est le coefficient de frottement visqueux lié à l’action du fluide sur l’équipage mobile (Ns/m), S est la section de réaction (m²). Variables : I est le courant de commande (A), P la pression régulée par l’électrovanne (Pa), z la position de l’équipage mobile. 1. Transformer dans Laplace l’équation précédente après avoir fait le changement de variable suivant :
0' zzz −=
On notera : Z(p), I(p) et P(p), les transformées de Laplace respectives de )(' tz , I(t) et P(t). On supposera les conditions
initiales nulles.
+ -
Dynamique de l'équipage mobile Distributeur+ canalisations
I Fe
Fp
Z Pε F
Devoir surveillé n°4 MPSI 5 janvier 2015 Page 3
2. La modélisation de l’écoulement dans le distributeur et du domaine de fluide compris entre l’électrovanne et le cylindre de frein montre que la pression de freinage évolue proportionnellement à l’intégrale de la position de l’équipage mobile (coefficient de proportionnalité C en Pa / ms). Compléter le schéma bloc du document-réponse.
3. Déterminer la fonction de transfert en boucle ouverte notée )(1 pH en exprimant les différents paramètres canoniques
(gain, pulsation propre non amortie, coefficient d’amortissement).
4. Quelle valeur doit prendre la masse M pour que la pulsation propre non amortie du second ordre de )(1 pH se situe à
1200 rd/s. La raideur K et la constante électromagnétique B sont fixées pour que les efforts perturbateurs (frottement, jets…) n’affectent pas le fonctionnement de l’électrovanne (K = 20000 N/m et B = 30 N/A).
5. Déterminer la valeur du coefficient visqueux F pour que l’amortissement réduit du second ordre de )(1 pH soit égal à
0,4 ? Cette valeur permettrait de déterminer le diamètre de perçage de l’orifice d’amortissement du noyau.
6. A partir de la caractéristique de l’électrovanne fournie sur la figure P4.B, donner la valeur numérique du gain statique ek
de l’électrovanne dans la zone 0,1A-1A. Pour cela, il faut mesurer la pente sur la partie linéaire entre 0,1 et 1 A. 7. La valeur précédente donne la valeur de la fonction de transfert en régime établi. En déduire une relation donnant S en
fonction de B et ek . Cette valeur est-elle vraisemblable ?
8. On admet que la fonction de transfert en boucle ouverte peut se mettre sous la forme suivante :
1 2
20 0
( )2
. 1
SGH p
pp p
ξω ω
=
+ +
avec GS = 15, ω0 = 1200 rd.s-1 et ξ = 0,4.
Sur le document réponse, tracer :
en rouge la réponse fréquentielle asymptotique de Bode de la fonction 1 2
20 0
( )2
1
SGH p
pp
ξω ω
=+ +
en vert la réponse fréquentielle asymptotique de Bode de la fonction de transfert en boucle ouverte 1( )H p .
B. Identification : On considère que la fonction de transfert globale de l’électrovanne est de la forme (ke est supposé positif) :
( )2
20 0
( )( )
( ) 21 1
ee
e
kP pH p
I p pp p
ξτω ω
= =
+ + +
1. Montrer que le lieu de transfert expérimental R2 est cohérent avec la forme de )( pHe du point de vue des asymptotes
haute et basse fréquence.
2. Identifier les paramètres ene ket ,ωτ de )( pHe . On considère que ne ωτ <</1 . Pour déterminer la valeur du
coefficient d’amortissement ξ, on rappelle que le coefficient de surtension vaut :
212
1
ξξ −=Q
Devoir surveillé n°4 MPSI 5 janvier 2015 Page 4
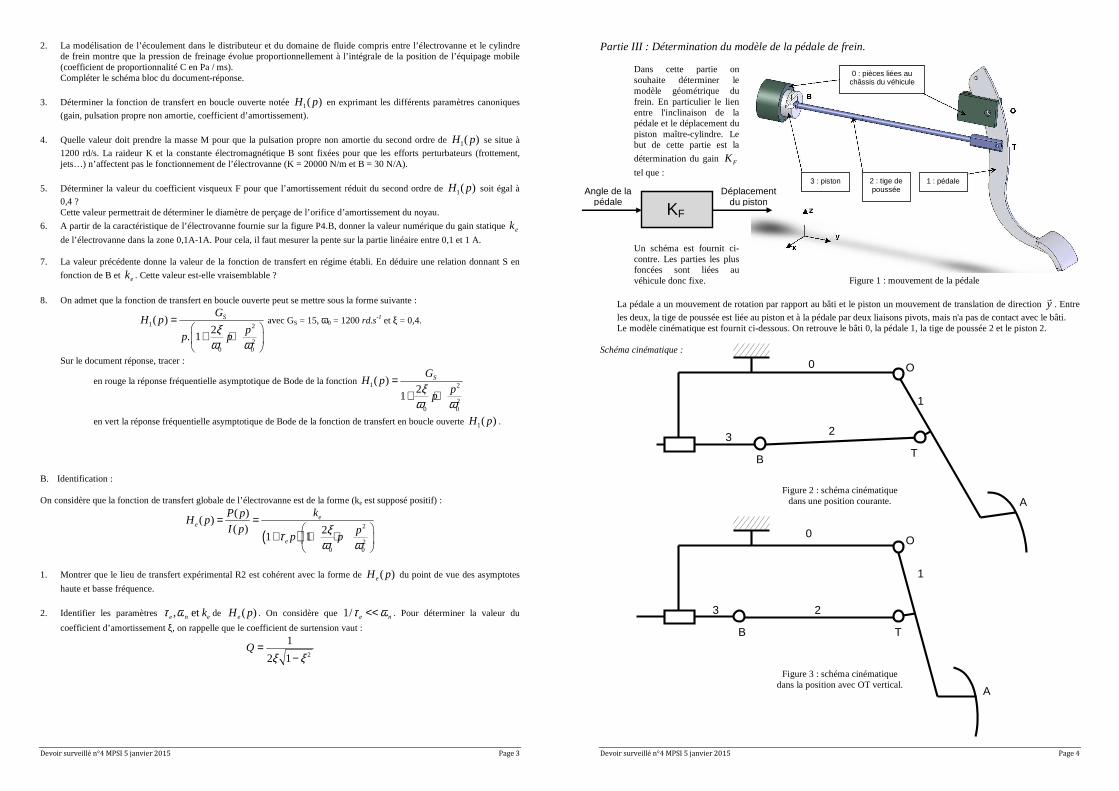
Partie III : Détermination du modèle de la pédale de frein.
Dans cette partie on souhaite déterminer le modèle géométrique du frein. En particulier le lien entre l'inclinaison de la pédale et le déplacement du piston maître-cylindre. Le but de cette partie est la
détermination du gain FK
tel que : Un schéma est fournit ci-contre. Les parties les plus foncées sont liées au véhicule donc fixe.
Figure 1 : mouvement de la pédale
La pédale a un mouvement de rotation par rapport au bâti et le piston un mouvement de translation de direction y
. Entre
les deux, la tige de poussée est liée au piston et à la pédale par deux liaisons pivots, mais n'a pas de contact avec le bâti. Le modèle cinématique est fournit ci-dessous. On retrouve le bâti 0, la pédale 1, la tige de poussée 2 et le piston 2.
Schéma cinématique :
Figure 2 : schéma cinématique dans une position courante.
Figure 3 : schéma cinématique dans la position avec OT vertical.
0 : pièces liées au châssis du véhicule
1 : pédale 2 : tige de poussée
3 : piston Angle de la
pédale Déplacement
du piston KF
0
3 2
1
O
B
A
T
3 2
1
O
B
A
T
0

Devoir surveillé n°4 MPSI 5 janvier 2015 Page 5
Données :
Le repère ( ), , ,O x y z
est lié au bâti, l'axe z
étant perpendiculaire au plan du schéma cinématique.
Le repère ( )1 1, , ,O x y z
est lié à la pédale tel que : 1.OT t y=
et ( ) 1 1( , ) ( , )t x x y yθ = = 53,4t mm= .
Le repère ( )2 2, , ,T x y z
est lié à la tige de poussée 2, tel que : ( ) 2 2( , ) ( , )t x x y yα = = et 2.TB l x=
, 200l mm=
Piston 3 : ( ). .tOB x t yλ= +
.
Etude géométrique analytique.
1. Sur le schéma cinématique du document-réponse 1 représenter les vecteurs 1x
, 1y
et 2x
, les longueurs t, l et ( )tλ ainsi
que les angles ( )tθ et ( )tα . 2. Sur le document-réponse 2, compléter les schéma de changement de base. 3. Donner l'expression vectorielle de la fermeture géométrique entre les points O, T et B.
4. Donner l'expression des vecteurs 1y
et 2x
dans la base ( ), ,x y z
.
5. En déduire 2 relations scalaires issues de la fermeture géométrique. 6. Utiliser les 2 relations précédentes pour faire disparaître la variable ( )tα et donner l'expression de la loi entrée-sortie
entre les variables ( )tθ et ( )tλ et les paramètres t et l. 7. L'angle ( )tθ est en position repos pour la valeur 20° et possède une amplitude de 40°. Le graphe suivant (obtenu à partir
de la loi entrée sortie précédente) montre l'évolution de ( )tλ en fonction de ( )tθ pour : ( )20 20tθ− ° < < ° . On souhaite
linéariser cette expression pour obtenir une expression de la forme : ( ) ( ).t tFKλ θ= . A partir du graphe suivant, donner
l'expression numérique de FK avec son unité.
Evolution du déplacement du piston en fonction de l'angle de la pédale.
( )tθ en degré
( )tλ en mm
Devoir surveillé n°4 MPSI 5 janvier 2015 Page 6

Devoir surveillé n°4 MPSI 5 janvier 2015 Page 7
MPSI Devoir surveillé de Sciences Industrielles pour l’Ingénieur n° 4 :
annexes
5 janvier 2015
Etude du système ABS.
Figure P1 : Système de freinage (version disques à l’avant et tambours à l’arrière)
Figure P2 : Modulateur ABS Mécatronic III et schéma hydraulique simplifié
Devoir surveillé n°4 MPSI 5 janvier 2015 Page 8
Figure P3 : Diagramme fonctionnel de l’ABS (représenté pour une seule roue)
a : schéma b : caractéristique statique de l’électrovanne
Figure P4 : Electrovanne ABS

Devoir surveillé n°4 MPSI 5 janvier 2015 Page 9
MPSI Devoir surveillé de Sciences Industrielles pour l’Ingénieur n° 4 :
document-réponse
5 janvier 2015
Etude du système ABS.
Question I.4
Question II.A.2
+ -
Dynamique de l'équipage mobile Distributeur+ canalisations
I Fe
Fp
Z Pε F
Devoir surveillé n°4 MPSI 5 janvier 2015 Page 10
Question II.A.8 Tracé fréquentiel asymptotique
20
0
-20
-40
-60
-80
-100
-120
-140
0
-90
-180
-270
-360
10 102 103 104 105 106
10 102 103 104 105 106

Devoir surveillé n°4 MPSI 5 janvier 2015 Page 11
Question II.B.2
Devoir surveillé n°4 MPSI 5 janvier 2015 Page 12
Question III.1 Question III.2
x
y
x
y
0
3 2
1
O
B
A
T
x
y