1977 yasnac rb 1980 yasnac rg 1983 yasnac rx … · de coupe (utilisée dans le laser, plasma ou la...
TRANSCRIPT
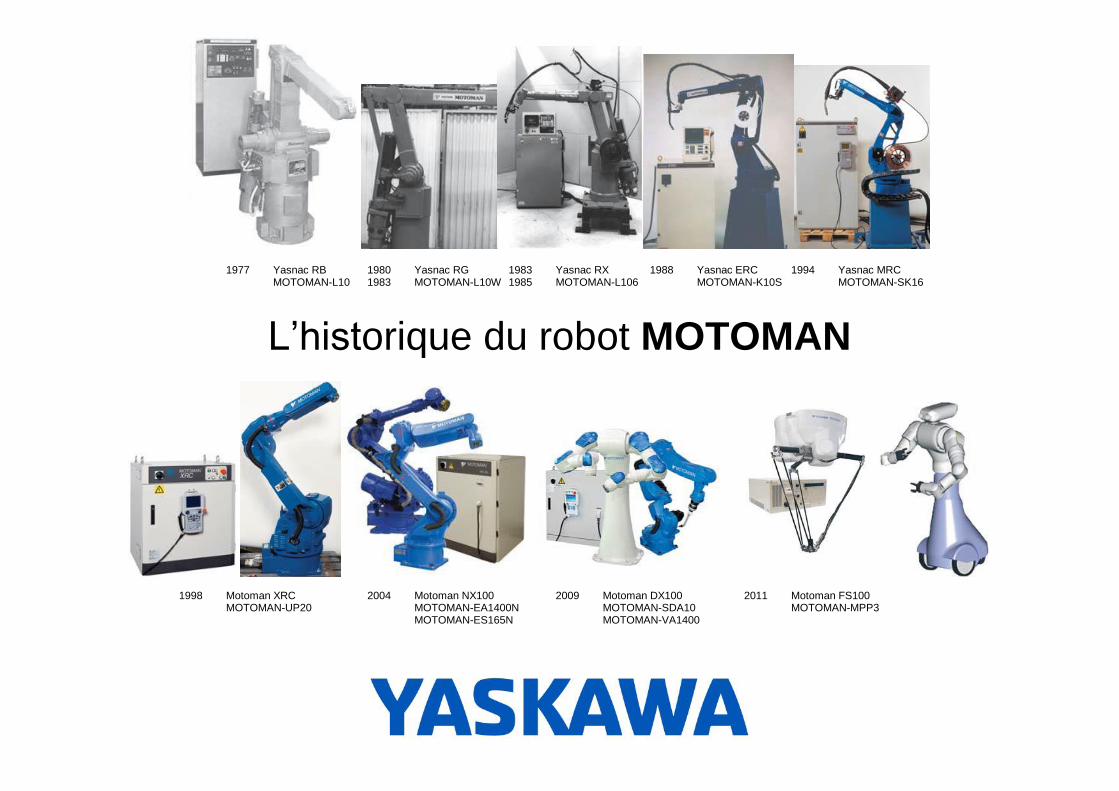
1977 Yasnac RB 1980 Yasnac RG 1983 Yasnac RX 1988 Yasnac ERC 1994 Yasnac MRC
MOTOMAN-L10 1983 MOTOMAN-L10W 1985 MOTOMAN-L106 MOTOMAN-K10S MOTOMAN-SK16
L’historique du robot MOTOMAN
1998 Motoman XRC 2004 Motoman NX100 2009 Motoman DX100 2011 Motoman FS100 MOTOMAN-UP20 MOTOMAN-EA1400N MOTOMAN-SDA10 MOTOMAN-MPP3
MOTOMAN-ES165N MOTOMAN-VA1400
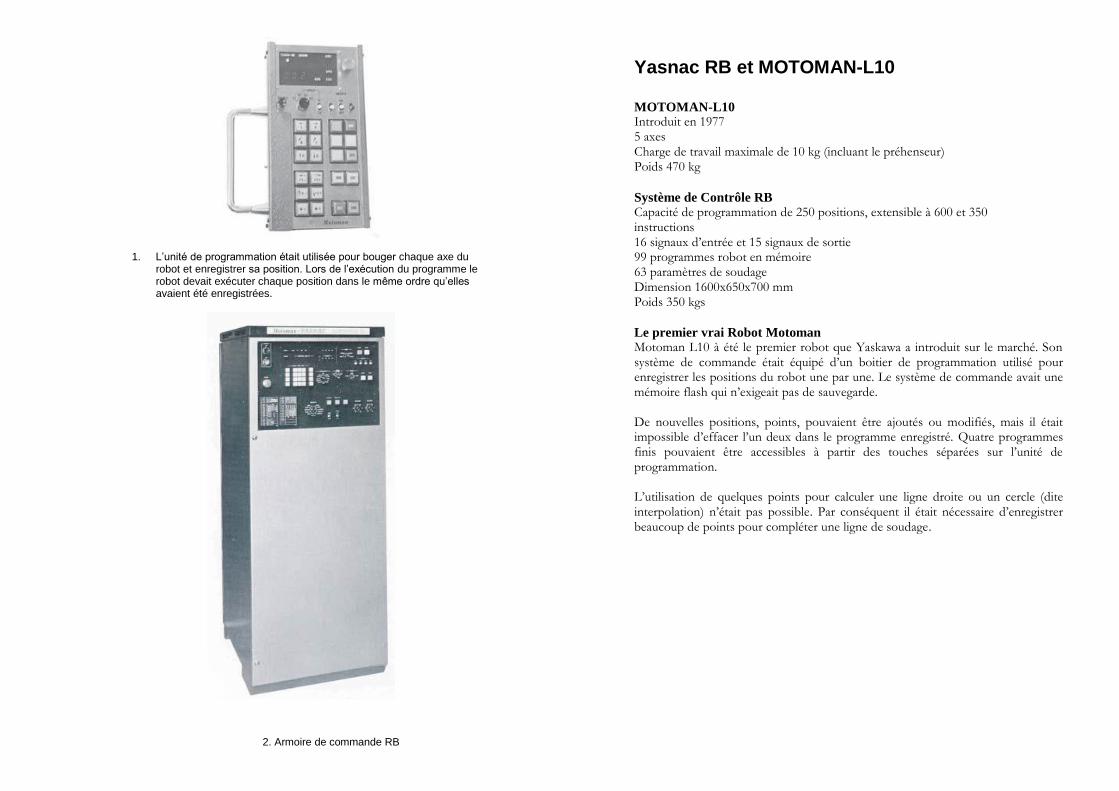
1. L’unité de programmation était utilisée pour bouger chaque axe du robot et enregistrer sa position. Lors de l’exécution du programme le robot devait exécuter chaque position dans le même ordre qu’elles avaient été enregistrées.
2. Armoire de commande RB
Yasnac RB et MOTOMAN-L10 MOTOMAN-L10 Introduit en 1977 5 axes Charge de travail maximale de 10 kg (incluant le préhenseur) Poids 470 kg
Système de Contrôle RB Capacité de programmation de 250 positions, extensible à 600 et 350 instructions 16 signaux d’entrée et 15 signaux de sortie 99 programmes robot en mémoire 63 paramètres de soudage Dimension 1600x650x700 mm Poids 350 kgs
Le premier vrai Robot Motoman Motoman L10 à été le premier robot que Yaskawa a introduit sur le marché. Son système de commande était équipé d’un boitier de programmation utilisé pour enregistrer les positions du robot une par une. Le système de commande avait une mémoire flash qui n’exigeait pas de sauvegarde. De nouvelles positions, points, pouvaient être ajoutés ou modifiés, mais il était impossible d’effacer l’un deux dans le programme enregistré. Quatre programmes finis pouvaient être accessibles à partir des touches séparées sur l’unité de programmation. L’utilisation de quelques points pour calculer une ligne droite ou un cercle (dite interpolation) n’était pas possible. Par conséquent il était nécessaire d’enregistrer beaucoup de points pour compléter une ligne de soudage.
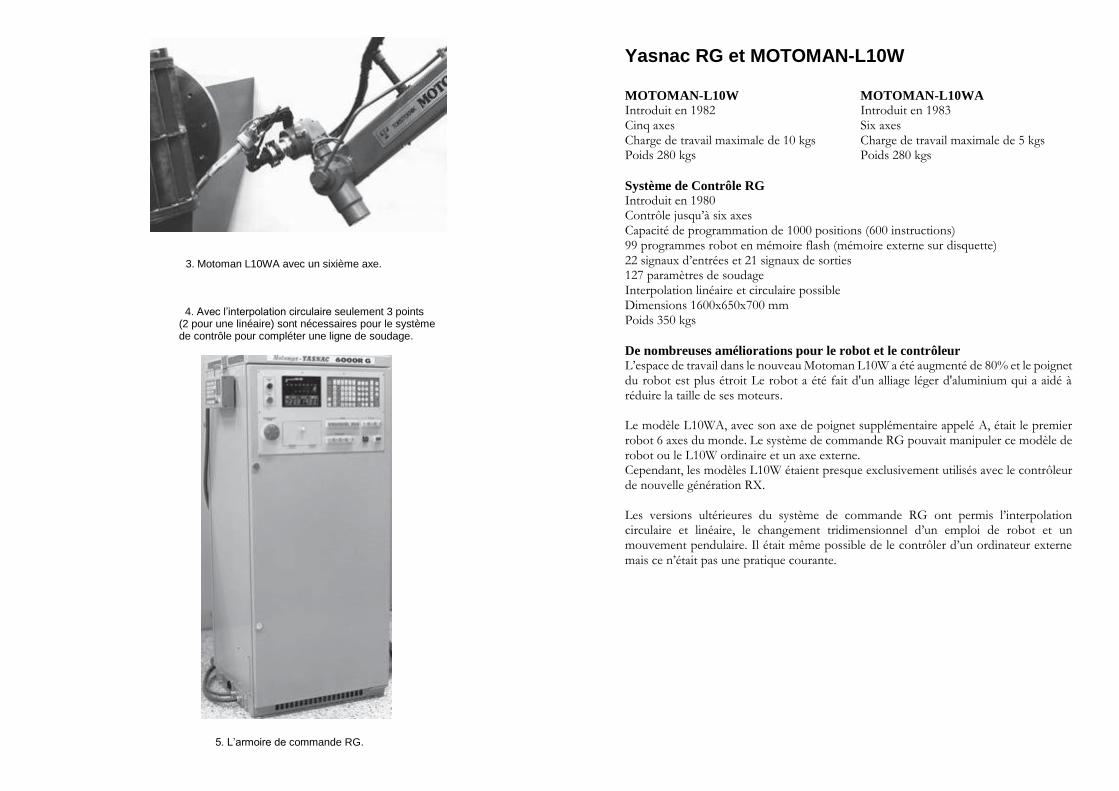
3. Motoman L10WA avec un sixième axe.
4. Avec l’interpolation circulaire seulement 3 points (2 pour une linéaire) sont nécessaires pour le système de contrôle pour compléter une ligne de soudage.
5. L’armoire de commande RG.
Yasnac RG et MOTOMAN-L10W MOTOMAN-L10W MOTOMAN-L10WA Introduit en 1982 Introduit en 1983 Cinq axes Six axes Charge de travail maximale de 10 kgs Charge de travail maximale de 5 kgs Poids 280 kgs Poids 280 kgs
Système de Contrôle RG Introduit en 1980 Contrôle jusqu’à six axes Capacité de programmation de 1000 positions (600 instructions) 99 programmes robot en mémoire flash (mémoire externe sur disquette) 22 signaux d’entrées et 21 signaux de sorties 127 paramètres de soudage Interpolation linéaire et circulaire possible Dimensions 1600x650x700 mm Poids 350 kgs
De nombreuses améliorations pour le robot et le contrôleur L’espace de travail dans le nouveau Motoman L10W a été augmenté de 80% et le poignet du robot est plus étroit Le robot a été fait d'un alliage léger d'aluminium qui a aidé à réduire la taille de ses moteurs. Le modèle L10WA, avec son axe de poignet supplémentaire appelé A, était le premier robot 6 axes du monde. Le système de commande RG pouvait manipuler ce modèle de robot ou le L10W ordinaire et un axe externe. Cependant, les modèles L10W étaient presque exclusivement utilisés avec le contrôleur de nouvelle génération RX. Les versions ultérieures du système de commande RG ont permis l’interpolation circulaire et linéaire, le changement tridimensionnel d’un emploi de robot et un mouvement pendulaire. Il était même possible de le contrôler d’un ordinateur externe mais ce n’était pas une pratique courante.
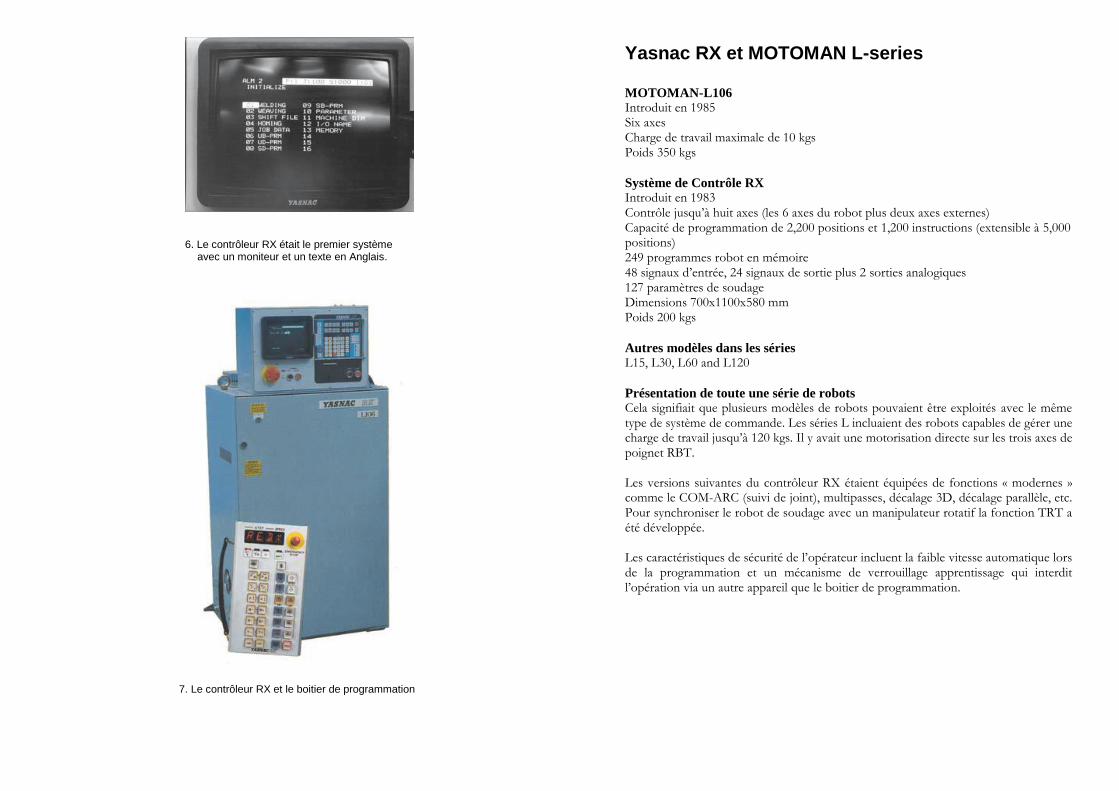
6. Le contrôleur RX était le premier système avec un moniteur et un texte en Anglais.
7. Le contrôleur RX et le boitier de programmation
Yasnac RX et MOTOMAN L-series MOTOMAN-L106 Introduit en 1985 Six axes Charge de travail maximale de 10 kgs Poids 350 kgs
Système de Contrôle RX Introduit en 1983 Contrôle jusqu’à huit axes (les 6 axes du robot plus deux axes externes) Capacité de programmation de 2,200 positions et 1,200 instructions (extensible à 5,000 positions) 249 programmes robot en mémoire 48 signaux d’entrée, 24 signaux de sortie plus 2 sorties analogiques 127 paramètres de soudage Dimensions 700x1100x580 mm Poids 200 kgs
Autres modèles dans les séries L15, L30, L60 and L120
Présentation de toute une série de robots Cela signifiait que plusieurs modèles de robots pouvaient être exploités avec le même type de système de commande. Les séries L incluaient des robots capables de gérer une charge de travail jusqu’à 120 kgs. Il y avait une motorisation directe sur les trois axes de poignet RBT. Les versions suivantes du contrôleur RX étaient équipées de fonctions « modernes » comme le COM-ARC (suivi de joint), multipasses, décalage 3D, décalage parallèle, etc. Pour synchroniser le robot de soudage avec un manipulateur rotatif la fonction TRT a été développée. Les caractéristiques de sécurité de l’opérateur incluent la faible vitesse automatique lors de la programmation et un mécanisme de verrouillage apprentissage qui interdit l’opération via un autre appareil que le boitier de programmation.

8. Affichage à l’écran avec le nouveau language de programmation robot INFORM.
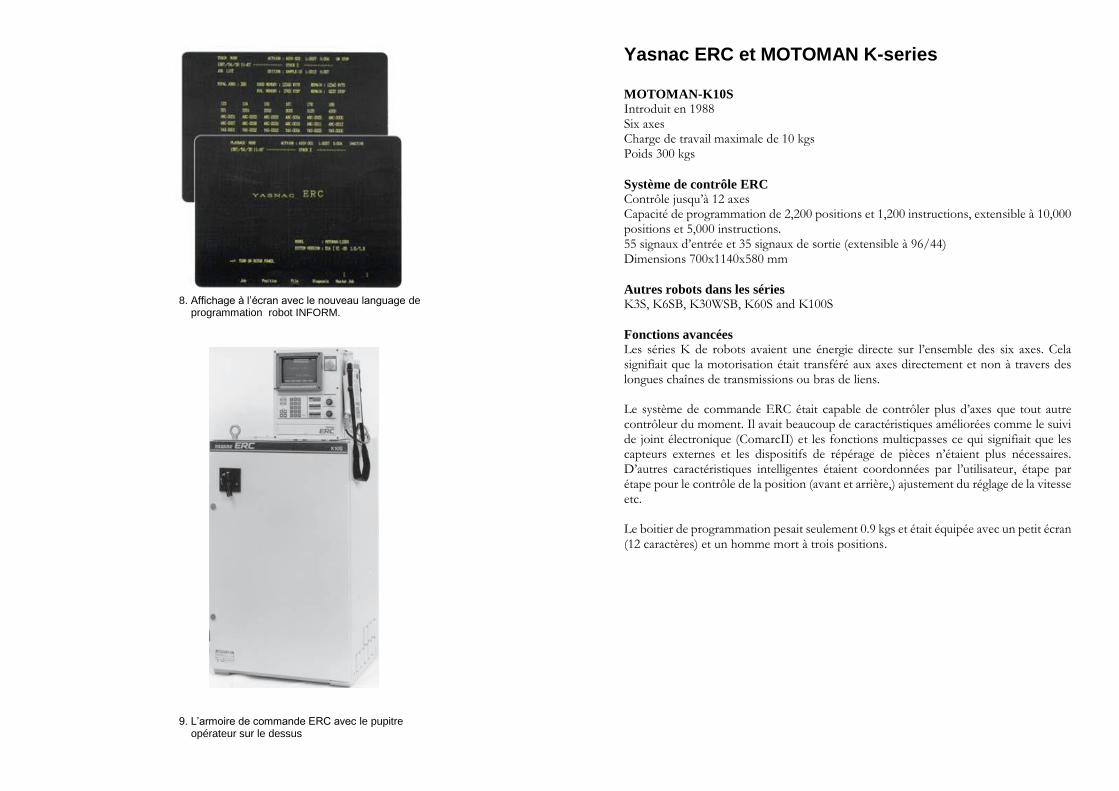
9. L’armoire de commande ERC avec le pupitre opérateur sur le dessus
Yasnac ERC et MOTOMAN K-series MOTOMAN-K10S Introduit en 1988 Six axes Charge de travail maximale de 10 kgs Poids 300 kgs
Système de contrôle ERC Contrôle jusqu’à 12 axes Capacité de programmation de 2,200 positions et 1,200 instructions, extensible à 10,000 positions et 5,000 instructions. 55 signaux d’entrée et 35 signaux de sortie (extensible à 96/44) Dimensions 700x1140x580 mm
Autres robots dans les séries K3S, K6SB, K30WSB, K60S and K100S
Fonctions avancées Les séries K de robots avaient une énergie directe sur l’ensemble des six axes. Cela signifiait que la motorisation était transféré aux axes directement et non à travers des longues chaînes de transmissions ou bras de liens. Le système de commande ERC était capable de contrôler plus d’axes que tout autre contrôleur du moment. Il avait beaucoup de caractéristiques améliorées comme le suivi de joint électronique (ComarcII) et les fonctions multicpasses ce qui signifiait que les capteurs externes et les dispositifs de répérage de pièces n’étaient plus nécessaires. D’autres caractéristiques intelligentes étaient coordonnées par l’utilisateur, étape par étape pour le contrôle de la position (avant et arrière,) ajustement du réglage de la vitesse etc. Le boitier de programmation pesait seulement 0.9 kgs et était équipée avec un petit écran (12 caractères) et un homme mort à trois positions.
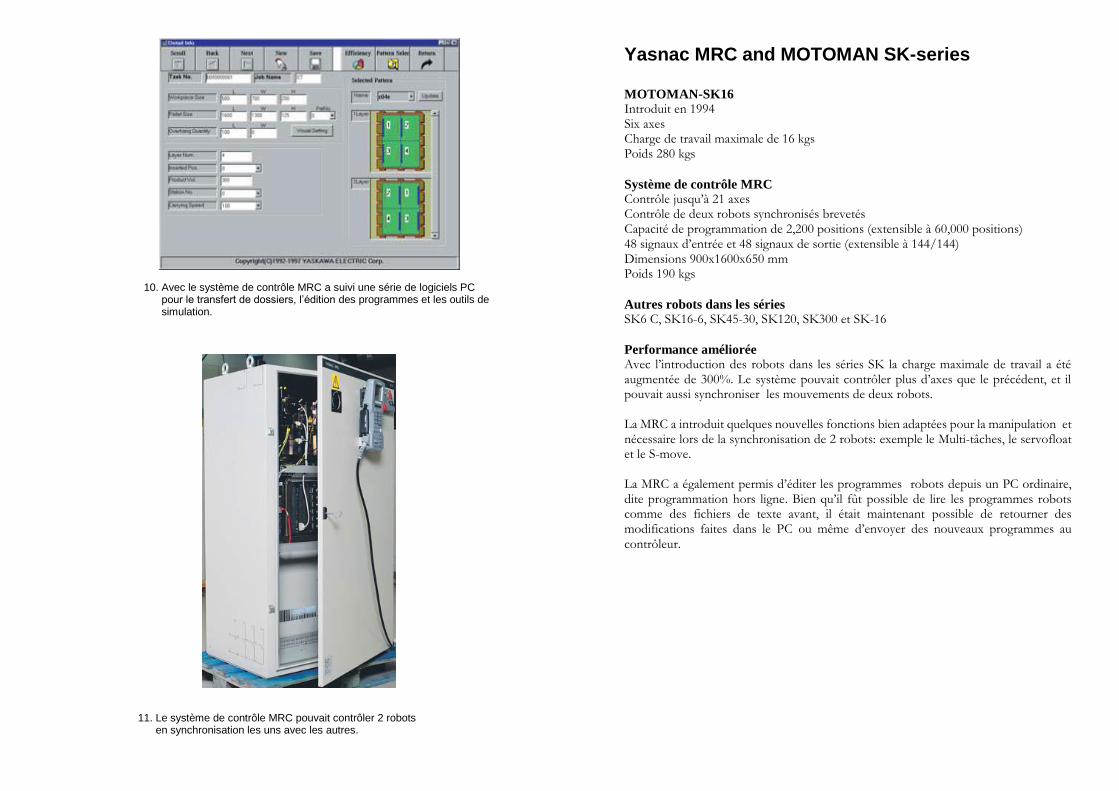
10. Avec le système de contrôle MRC a suivi une série de logiciels PC pour le transfert de dossiers, l’édition des programmes et les outils de simulation.
11. Le système de contrôle MRC pouvait contrôler 2 robots en synchronisation les uns avec les autres.
Yasnac MRC and MOTOMAN SK-series MOTOMAN-SK16 Introduit en 1994 Six axes Charge de travail maximale de 16 kgs Poids 280 kgs
Système de contrôle MRC Contrôle jusqu’à 21 axes Contrôle de deux robots synchronisés brevetés Capacité de programmation de 2,200 positions (extensible à 60,000 positions) 48 signaux d’entrée et 48 signaux de sortie (extensible à 144/144) Dimensions 900x1600x650 mm Poids 190 kgs
Autres robots dans les séries SK6 C, SK16-6, SK45-30, SK120, SK300 et SK-16
Performance améliorée Avec l’introduction des robots dans les séries SK la charge maximale de travail a été augmentée de 300%. Le système pouvait contrôler plus d’axes que le précédent, et il pouvait aussi synchroniser les mouvements de deux robots. La MRC a introduit quelques nouvelles fonctions bien adaptées pour la manipulation et nécessaire lors de la synchronisation de 2 robots: exemple le Multi-tâches, le servofloat et le S-move. La MRC a également permis d’éditer les programmes robots depuis un PC ordinaire, dite programmation hors ligne. Bien qu’il fût possible de lire les programmes robots comme des fichiers de texte avant, il était maintenant possible de retourner des modifications faites dans le PC ou même d’envoyer des nouveaux programmes au contrôleur.
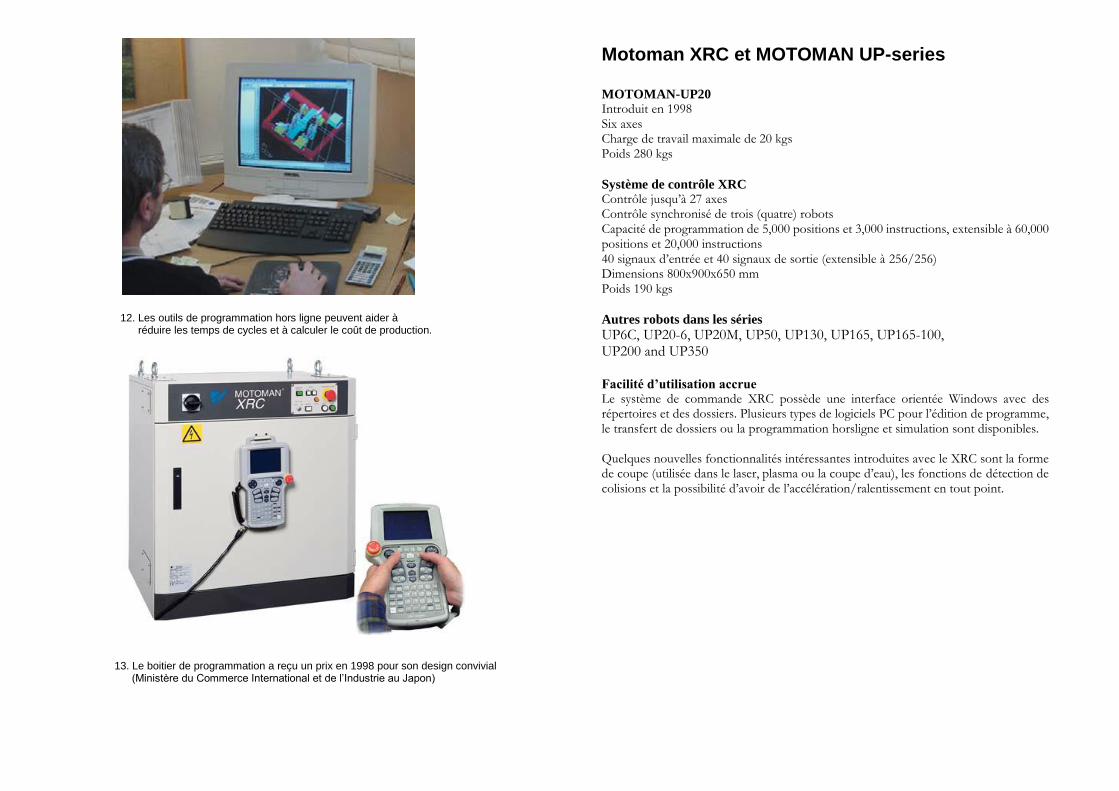
12. Les outils de programmation hors ligne peuvent aider à réduire les temps de cycles et à calculer le coût de production.
13. Le boitier de programmation a reçu un prix en 1998 pour son design convivial (Ministère du Commerce International et de l’Industrie au Japon)
Motoman XRC et MOTOMAN UP-series MOTOMAN-UP20 Introduit en 1998 Six axes Charge de travail maximale de 20 kgs Poids 280 kgs
Système de contrôle XRC Contrôle jusqu’à 27 axes Contrôle synchronisé de trois (quatre) robots Capacité de programmation de 5,000 positions et 3,000 instructions, extensible à 60,000 positions et 20,000 instructions 40 signaux d’entrée et 40 signaux de sortie (extensible à 256/256) Dimensions 800x900x650 mm Poids 190 kgs
Autres robots dans les séries
UP6C, UP20-6, UP20M, UP50, UP130, UP165, UP165-100, UP200 and UP350 Facilité d’utilisation accrue Le système de commande XRC possède une interface orientée Windows avec des répertoires et des dossiers. Plusieurs types de logiciels PC pour l’édition de programme, le transfert de dossiers ou la programmation horsligne et simulation sont disponibles. Quelques nouvelles fonctionnalités intéressantes introduites avec le XRC sont la forme de coupe (utilisée dans le laser, plasma ou la coupe d’eau), les fonctions de détection de colisions et la possibilité d’avoir de l’accélération/ralentissement en tout point.

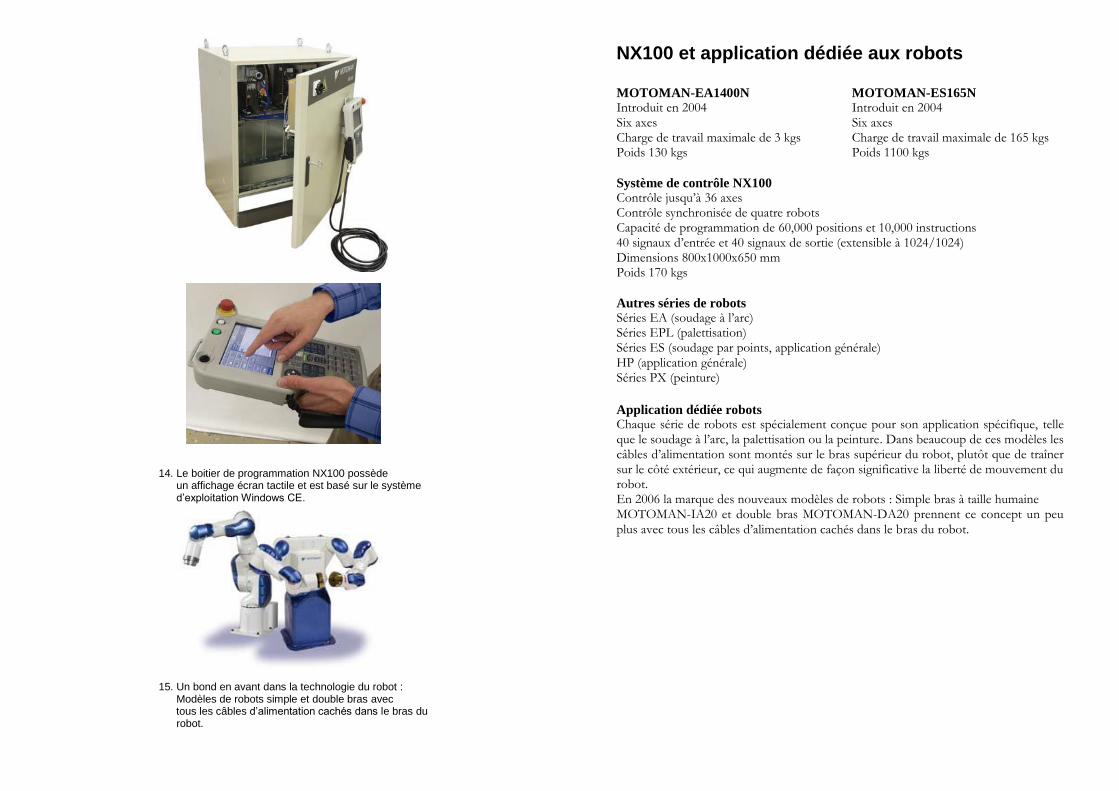
14. Le boitier de programmation NX100 possède un affichage écran tactile et est basé sur le système d’exploitation Windows CE.
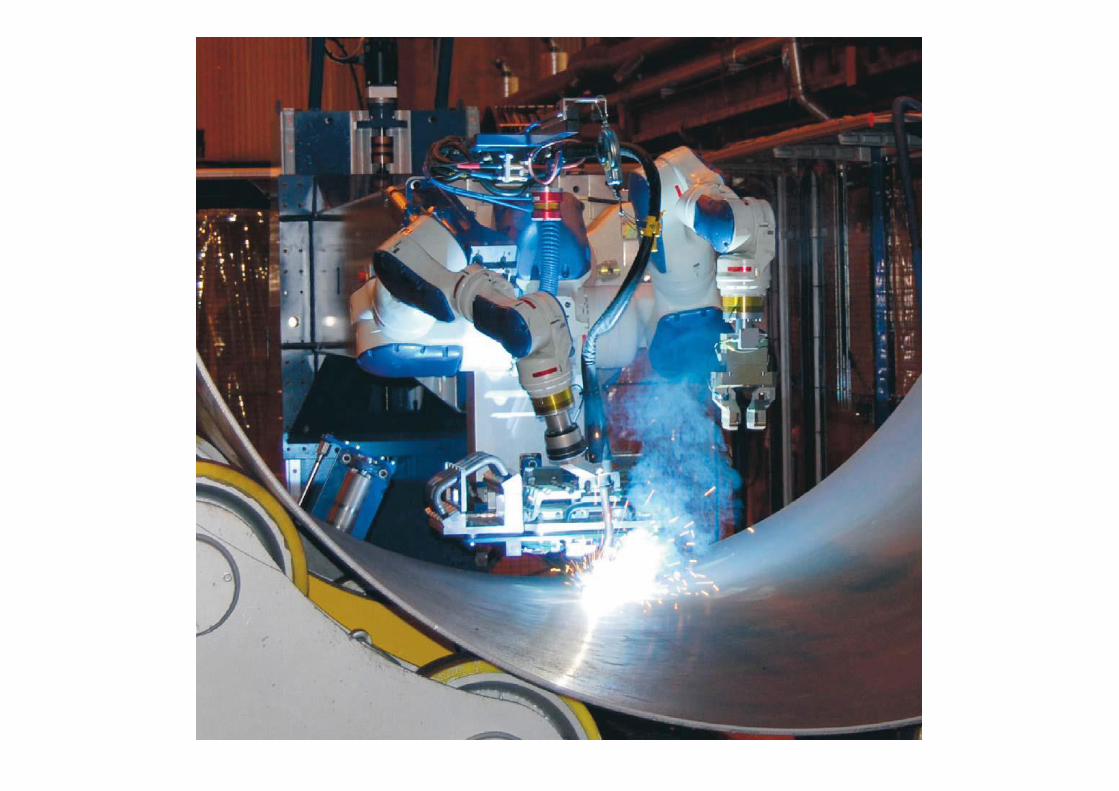
15. Un bond en avant dans la technologie du robot : Modèles de robots simple et double bras avec tous les câbles d’alimentation cachés dans le bras du robot.
NX100 et application dédiée aux robots MOTOMAN-EA1400N MOTOMAN-ES165N Introduit en 2004 Introduit en 2004 Six axes Six axes Charge de travail maximale de 3 kgs Charge de travail maximale de 165 kgs Poids 130 kgs Poids 1100 kgs
Système de contrôle NX100 Contrôle jusqu’à 36 axes Contrôle synchronisée de quatre robots Capacité de programmation de 60,000 positions et 10,000 instructions 40 signaux d’entrée et 40 signaux de sortie (extensible à 1024/1024) Dimensions 800x1000x650 mm Poids 170 kgs
Autres séries de robots Séries EA (soudage à l’arc) Séries EPL (palettisation) Séries ES (soudage par points, application générale) HP (application générale) Séries PX (peinture)
Application dédiée robots Chaque série de robots est spécialement conçue pour son application spécifique, telle que le soudage à l’arc, la palettisation ou la peinture. Dans beaucoup de ces modèles les câbles d’alimentation sont montés sur le bras supérieur du robot, plutôt que de traîner sur le côté extérieur, ce qui augmente de façon significative la liberté de mouvement du robot. En 2006 la marque des nouveaux modèles de robots : Simple bras à taille humaine MOTOMAN-IA20 et double bras MOTOMAN-DA20 prennent ce concept un peu plus avec tous les câbles d’alimentation cachés dans le bras du robot.

16. L’économie d’énergie du contrôleur DX100 dispose de vitesse de traitement plus rapide, de contrôle de bras robotisé avancé et d’une architecture de PC robuste avec Ethernet intégré.
17. Toutes les commandes opérateurs sont situées sur la programmation séparée, réduisant souvent la nécessité d’API séparée et HMI.
DX100 et nouveaux types de robots MOTOMAN-SDA10 MOTOMAN-VA1400 Introduit en 2008 Introduit en 2009 15 axes 7 axes Charge de travail maximale de 10 kgs Charge de travail maximale de 7 kgs Poids 220 kgs Poids 150 kgs
Système de contrôle DX100 Contrôle jusqu’à 72 axes Contrôle synchronisé de huit robots Capacité de programmation de 200,000 positions et 10,000 instructions et 15,000 étapes PLC 40 signaux d’entrée et 40 signaux de sortie (extensible à 2048/2048) Dimensions 800x1000x650 mm Poids 250 kgs
Autres séries de robots Séries MA (soudage à l’arc) Séries MPL (palettisation) Séries ES (soudage par points, application générale) Séries MH et HP (application générale) MPK, MPP et MYS (cueillette et conditionnement) SIA (Unique bras flexible)
Gain de temps et d’argent Le DX100 offre une meilleure convivialité et l’économie du système. Les robots économisent l’énergie pendant les temps morts, fournissant jusqu’à 25% en économie d’énergie, et les nouvelles fonctionnalités de la suspension de la programmation réduisent la nécessité d’un équipement séparé et donc le coût global. La communication avec les réseaux de communications a été rendue plus facile ce qui permet par exemple pour les techniciens robots de superviser les robots à distance.

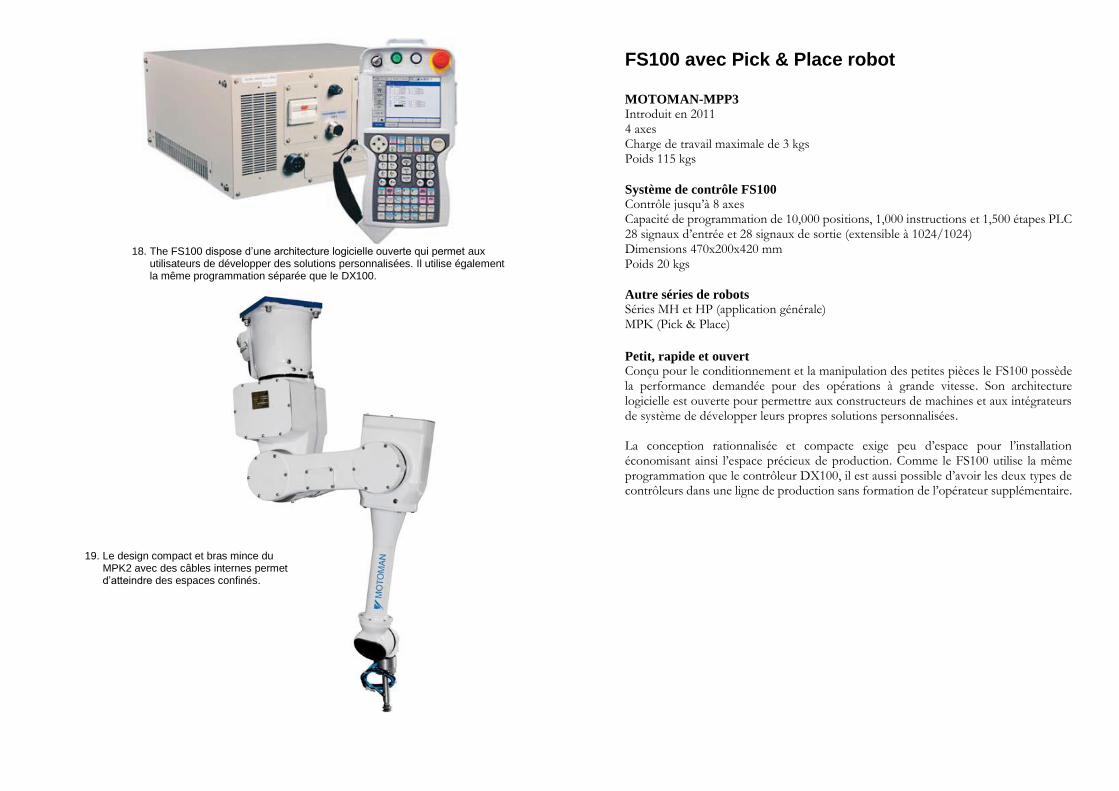
18. The FS100 dispose d’une architecture logicielle ouverte qui permet aux utilisateurs de développer des solutions personnalisées. Il utilise également la même programmation séparée que le DX100.
19. Le design compact et bras mince du MPK2 avec des câbles internes permet d’atteindre des espaces confinés.
FS100 avec Pick & Place robot MOTOMAN-MPP3 Introduit en 2011 4 axes Charge de travail maximale de 3 kgs Poids 115 kgs
Système de contrôle FS100 Contrôle jusqu’à 8 axes Capacité de programmation de 10,000 positions, 1,000 instructions et 1,500 étapes PLC 28 signaux d’entrée et 28 signaux de sortie (extensible à 1024/1024) Dimensions 470x200x420 mm Poids 20 kgs
Autre séries de robots Séries MH et HP (application générale) MPK (Pick & Place)
Petit, rapide et ouvert Conçu pour le conditionnement et la manipulation des petites pièces le FS100 possède la performance demandée pour des opérations à grande vitesse. Son architecture logicielle est ouverte pour permettre aux constructeurs de machines et aux intégrateurs de système de développer leurs propres solutions personnalisées. La conception rationnalisée et compacte exige peu d’espace pour l’installation économisant ainsi l’espace précieux de production. Comme le FS100 utilise la même programmation que le contrôleur DX100, il est aussi possible d’avoir les deux types de contrôleurs dans une ligne de production sans formation de l’opérateur supplémentaire.

Robots de service utiles à l’homme Robots de nettoyage
SmartPal et RoboPorter Pour semi-conducteurs et panneaux solaires
La volonté d’innovation de YASKAWA
Depuis que YASKAWA Electric Corportation a été établi, notre esprit et notre volonté d’innovation n’ont cessé. Le centre de recherche qui a été initialement lancé en 1921, coopère avec la section de recherche de chaque service d’entreprise. Nous essayons de faire notre maximum pour développer la nouvelle technologie qui est bonne pour les personnes et la terre. Notre objectif est de nous concentrer sur notre corps de métier qui est le robot industriel. Dans le même temps nous avons également l’intention de créer un marché pour les robots qui sont plus faciles à utiliser et qui fonctionnent dans des domaines qui impliquent de plus près les personnes. Les mots clés qui inspirent ces nouveaux marchés de robots sont : Co-existence avec les personnes, proximité des personnes, et assistance aux personnes.