0.1 splines cubiques - accueil - girefafortin/mat17442/documents/splines.pdfla spline lin´eaire est...
TRANSCRIPT
0.1. SPLINES CUBIQUES 1
f(x2)f(x4)
f(x1)f(x3)
f(x0)
x0 x1 x2 x3 x4
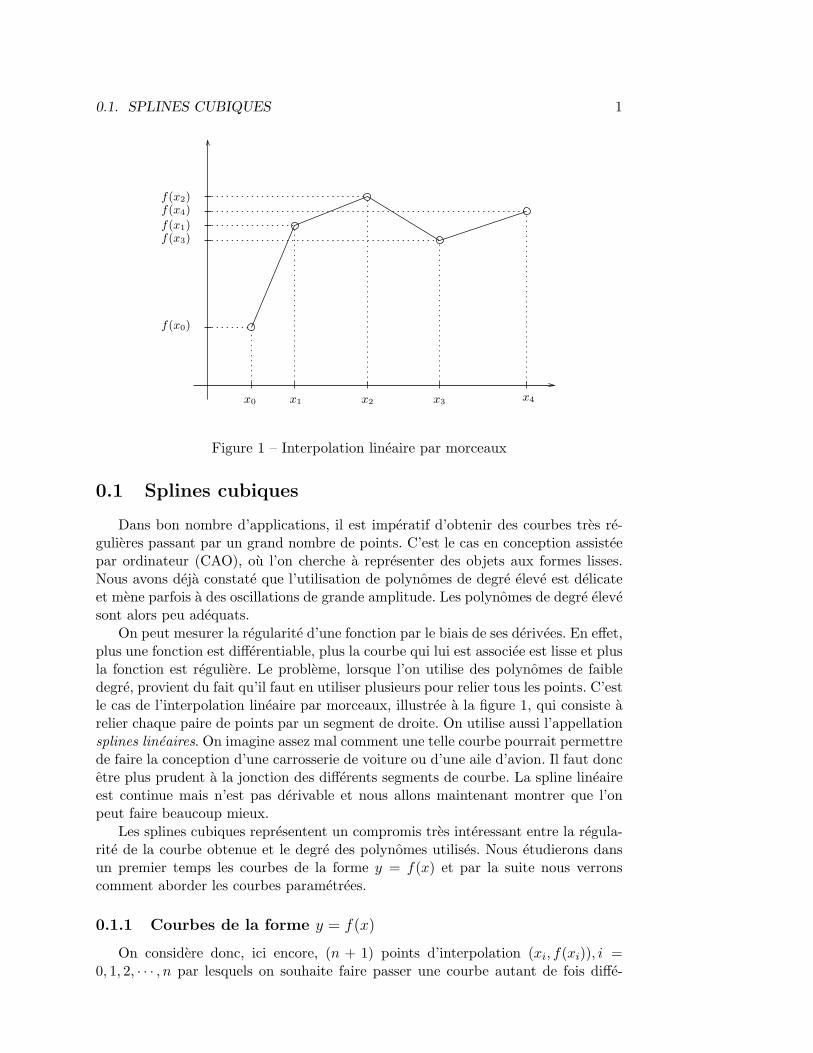
Figure 1 – Interpolation lineaire par morceaux
0.1 Splines cubiques
Dans bon nombre d’applications, il est imperatif d’obtenir des courbes tres re-gulieres passant par un grand nombre de points. C’est le cas en conception assisteepar ordinateur (CAO), ou l’on cherche a representer des objets aux formes lisses.Nous avons deja constate que l’utilisation de polynomes de degre eleve est delicateet mene parfois a des oscillations de grande amplitude. Les polynomes de degre elevesont alors peu adequats.
On peut mesurer la regularite d’une fonction par le biais de ses derivees. En effet,plus une fonction est differentiable, plus la courbe qui lui est associee est lisse et plusla fonction est reguliere. Le probleme, lorsque l’on utilise des polynomes de faibledegre, provient du fait qu’il faut en utiliser plusieurs pour relier tous les points. C’estle cas de l’interpolation lineaire par morceaux, illustree a la figure 1, qui consiste arelier chaque paire de points par un segment de droite. On utilise aussi l’appellationsplines lineaires. On imagine assez mal comment une telle courbe pourrait permettrede faire la conception d’une carrosserie de voiture ou d’une aile d’avion. Il faut doncetre plus prudent a la jonction des differents segments de courbe. La spline lineaireest continue mais n’est pas derivable et nous allons maintenant montrer que l’onpeut faire beaucoup mieux.
Les splines cubiques representent un compromis tres interessant entre la regula-rite de la courbe obtenue et le degre des polynomes utilises. Nous etudierons dansun premier temps les courbes de la forme y = f(x) et par la suite nous verronscomment aborder les courbes parametrees.
0.1.1 Courbes de la forme y = f(x)
On considere donc, ici encore, (n + 1) points d’interpolation (xi, f(xi)), i =0, 1, 2, · · · , n par lesquels on souhaite faire passer une courbe autant de fois diffe-
2
p0(x)
f(x2)
f(x3)
f(x1)
f(x0)
p1(x)
p2(x)
p3(x)
x1 x2 x3 x4x0
f(x4)
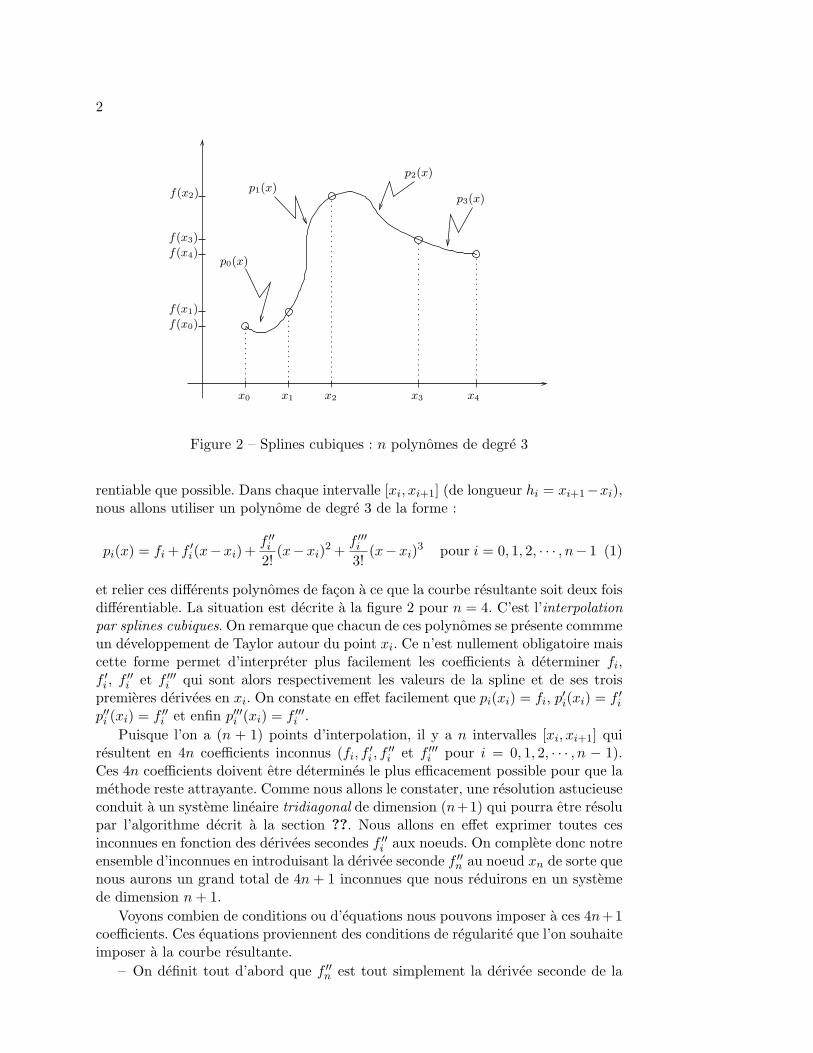
Figure 2 – Splines cubiques : n polynomes de degre 3
rentiable que possible. Dans chaque intervalle [xi, xi+1] (de longueur hi = xi+1−xi),nous allons utiliser un polynome de degre 3 de la forme :
pi(x) = fi + f ′i(x−xi) +f ′′i2!
(x−xi)2 +f ′′′i3!
(x−xi)3 pour i = 0, 1, 2, · · · , n− 1 (1)
et relier ces differents polynomes de facon a ce que la courbe resultante soit deux foisdifferentiable. La situation est decrite a la figure 2 pour n = 4. C’est l’interpolationpar splines cubiques. On remarque que chacun de ces polynomes se presente commmeun developpement de Taylor autour du point xi. Ce n’est nullement obligatoire maiscette forme permet d’interpreter plus facilement les coefficients a determiner fi,f ′i , f
′′i et f ′′′i qui sont alors respectivement les valeurs de la spline et de ses trois
premieres derivees en xi. On constate en effet facilement que pi(xi) = fi, p′i(xi) = f ′ip′′i (xi) = f ′′i et enfin p′′′i (xi) = f ′′′i .
Puisque l’on a (n + 1) points d’interpolation, il y a n intervalles [xi, xi+1] quiresultent en 4n coefficients inconnus (fi, f ′i , f
′′i et f ′′′i pour i = 0, 1, 2, · · · , n − 1).
Ces 4n coefficients doivent etre determines le plus efficacement possible pour que lamethode reste attrayante. Comme nous allons le constater, une resolution astucieuseconduit a un systeme lineaire tridiagonal de dimension (n+1) qui pourra etre resolupar l’algorithme decrit a la section ??. Nous allons en effet exprimer toutes cesinconnues en fonction des derivees secondes f ′′i aux noeuds. On complete donc notreensemble d’inconnues en introduisant la derivee seconde f ′′n au noeud xn de sorte quenous aurons un grand total de 4n+ 1 inconnues que nous reduirons en un systemede dimension n+ 1.
Voyons combien de conditions ou d’equations nous pouvons imposer a ces 4n+1coefficients. Ces equations proviennent des conditions de regularite que l’on souhaiteimposer a la courbe resultante.
– On definit tout d’abord que f ′′n est tout simplement la derivee seconde de la

0.1. SPLINES CUBIQUES 3
spline en xn. On a ainsi une premiere equation :
f ′′n = p′′n−1(xn) = f ′′n−1 + f ′′′n−1(xn − xn−1) = f ′′n−1 + f ′′′n−1hn−1
qui peut aussi s’ecrire :
f ′′′n−1 =f ′′n − f ′′n−1
hn−1(2)
– A sa premiere extremite, le polynome pi(x) passe (xi, f(xi)), c’est-a-dire :
pi(xi) = fi = f(xi) pour i = 0, 1, 2, · · · , n− 1
ce qui nous donne n equations ;– De meme, on obtient n nouvelles equations en regardant a la deuxieme extre-
mite de chaque sous-intervalle. Pour i = 0, 1, 2, · · · , n− 1 :
pi(xi+1) = f(xi+1) = fi + f ′i(xi+1 − xi) +f ′′i2!
(xi+1 − xi)2 +f ′′′i3!
(xi+1 − xi)3
= f(xi) + f ′ihi +f ′′i2!h2i +
f ′′′i3!h3i
On peut ainsi isoler f ′i pour obtenir :
f ′i =f(xi+1)− f(xi)
hi− f ′′i
2!hi − f ′′′i
3!h2i = f [xi, xi+1]− f ′′i
2!hi − f ′′′i
3!h2i (3)
– On impose maintenant la continuite des derivees secondes aux (n− 1) noeudsinterieurs xi+1, i = 0, 1, · · · , n− 2, c’est-a-dire n− 1 nouvelles equations :
p′′i+1(xi+1) = p′′i (xi+1)
ou encore :f ′′i+1 = f ′′i + f ′′′i (xi+1 − xi) = f ′′i + f ′′′i hi
et en isolant f ′′′i , on trouve :
f ′′′i =f ′′i+1 − f ′′i
hi(4)
Cette relation n’est a priori vraie que pour i = 0, 1, · · ·n − 2. En vertu del’equation 2, elle est egalement vraie pour i = n − 1 de sorte que l’on peutremplacer dans l’equation 3 qui devient :
f ′i = f [xi, xi+1]− f ′′i2!hi −
(f ′′i+1 − f ′′i
3!
)hi
et par la suite :
f ′i = f [xi, xi+1]− hif′′i
3− hif
′′i+1
6(5)

4
– Il ne reste plus qu’a imposer la continuite de la derivee premiere aux memes(n− 1) points interieurs ((n− 1) nouvelles equations) :
p′i+1(xi+1) = p′i(xi+1)
ou encore :
f ′i+1 = f ′i + f ′′i hi +f ′′′i2h2i
On peut ensuite utiliser les expressions 4 et 5 pour tout exprimer en fonction desinconnues f ′′i . On a alors :
f [xi+1, xi+2]−hi+1f′′i+1
3−hi+1f
′′i+2
6= f [xi, xi+1]−hif
′′i
3−hif
′′i+1
6+f ′′i hi+
(f ′′i+1 − f ′′i
2
)hi
qui devient, en regroupant les termes :
hif′′i + 2(hi + hi+1)f ′′i+1 + hi+2f
′′i+2 = 6(f [xi+1, xi+2]− f [xi, xi+1])
Une derniere simplification est possible si l’on divise chaque terme de cette derniereequation par :
hi + hi+1 = xi+1 − xi + xi+2 − xi+1 = xi+2 − xice qui donne :
hi(hi + hi+1)
f ′′i + 2f ′′i+1 +hi+1
(hi + hi+1)f ′′i+2 = 6f [xi, xi+1, xi+2]
pour i = 0, 1, 2, · · · , n− 2
(6)
On remarque que le terme de droite fait intervenir les deuxiemes differences diviseesque nous avons definies a la section ??. Dans le cas ou les abscisses sont equidistantes,c’est-a-dire hi = h quel que soit i, la matrice du systeme lineaire 6 se trouve simplifieede beaucoup :
12f ′′i + 2f ′′i+1 +
12f ′′i+2 = 6f [xi, xi+1, xi+2]
pour i = 0, 1, 2, · · · , n− 2
(7)
En effet, on obtient alors une matrice tridiagonale dont la diagonale principale necontient que des 2, tandis que les deux autres diagonales sont constituees de coef-ficients valant 1
2 . Cette matrice ne depend donc pas de la valeur de h, qui n’affecteque le terme de droite
Nous avons donc impose un total de 4n−1 contraintes a nos 4n+1 inconnues dedepart. Nous avons egalement exprime toutes les inconnues du systeme en fonctiondes derivees secondes f ′′i de la spline et de fait il ne reste que n + 1 inconnuespour les n−1 equations du systeme 6. On doit donc ajouter, de facon plus ou moinsarbitraire, deux equations supplementaires pour completer le systeme et avoir autantd’equations que d’inconnues. Nous presentons maintenant quelques possibilites dontle choix precis depend du probleme et de la connaissance que l’on a de ce qui sepasse aux extremites de la courbe.

0.1. SPLINES CUBIQUES 5
– La maniere la plus simple de completer le systeme d’equations consiste a im-poser les valeurs des derivees secondes aux deux extremites soit p′′0(x0) = a etp′′n−1(xn) = b :
f ′′0 = a et f ′′n = b (8)
Cela supppose bien entendu que l’on connaıt les valeurs a et b de la deriveeseconde aux extremites de la courbe. Si a = b = 0, on qualifie de splinenaturelle la courbe qui en resulte. Ces deux equations s’ajoutent aisement ausysteme 6.
– Un autre choix possible consiste a imposer que :{
f ′′0 = f ′′1 ou encore f ′′0 − f ′′1 = 0f ′′n−1 = f ′′n ou encore f ′′n−1 − f ′′n = 0
(9)
ce qui revient a imposer une courbure constante dans le premier et dans le der-nier intervalle. Ces contraintes s’ajoutent aussi aux equations 6 et completentainsi le systeme de (n+ 1) equations en (n+ 1) inconnues.
– On peut aussi imposer les derivees premieres p′0(x0) = a et p′n−1(xn) = b auxdeux extremites (en supposant toujours que nous les connaissions). En x0, onutilise directement la relation 5 :
f ′0 = f [x0, x1]− h0f′′0
3− h0f
′′1
6= a
qui devient :
2f ′′0 + f ′′1 =6h0
(f [x0, x1]− a)
En xn cependant, on ne peut utiliser directement la relation 5 puisqu’elle n’estdefinie que pour i allant de 0 a n− 2. Cependant, de la definition de pn−1(x) :
p′n−1(xn) = f ′n−1 + f ′′n−1hn−1 +f ′′′n−1
2h2n−1
ce qui fait qu’en developpant f ′n−1 et f ′′′n−1 a l’aide des formules 5 et 2, ontrouve :
p′n−1(xn) = f [xn−1, xn] +hn−1
6(f ′′n−1 + 2f ′′n) (10)
Imposer b = p′n−1(xn) revient alors a :
f ′′n−1 + 2f ′′n =6
hn−1(b− f [xn−1, xn])
et on doit donc ajouter au systeme 6 les equations :
2f ′′0 + f ′′1 =6h0
(f [x0, x1]− a)
f ′′n−1 + 2f ′′n =6
hn−1(b− f [xn−1, xn])
(11)

6
– Une autre avenue interessante est la condition dite « not-a-knot » en anglais.Cela consiste a eliminer, mais de maniere virtuelle seulement, les noeuds d’in-terpolation x1 et xn−1. Pour ce faire, on impose en ces deux noeuds la conti-nuite de la troisieme derivee soit :
p′′′0 (x1) = p′′′1 (x1) ainsi que p′′′n−2(xn−1) = p′′′n−1(xn−1)
ce qui revient a :f ′′′0 = f ′′′1 et f ′′′n−2 = f ′′′n−1
et enfin, en utilisant 4 :
f ′′1 − f ′′0h0
=f ′′2 − f ′′1h1
ainsi quef ′′n−1 − f ′′n−2
hn−2=f ′′n − f ′′n−1
hn−1
On doit donc ajouter au systeme 6 les equations :
h1f′′0 − (h0 + h1)f ′′1 + h0f
′′2 = 0
hn−1f′′n−2 − (hn−2 + hn−1)f ′′n−1 + hn−2f
′′n = 0
(12)
Au noeud x1, les polynomes p0(x) et p1(x) coıncident ainsi que leurs troispremieres derivees. Puisque ce sont des polynomes de degre 3, ils sont doncidentiques et il n’y a en fait qu’un seul polynome de degre 3 dans les deuxpremiers intervalles. C’est pourquoi on dit que le noeud x1 n’est pas vraimentun noeud (« not-a-knot » ). Il en est de meme pour les polynomes pn−2(x) etpn−1(x) adjacents au noeud xn−1.
– Une derniere situation interessante et frequemment utile concerne la represen-tation de fonctions periodiques. Dans ce cas, on doit verifier des le depart quef(x0) = f(xn) mais cela ne suffit pas a imposer la periodicite de la spline. Ondoit aussi imposer la periodicite des derivees premiere et deuxieme soit f ′0 = f ′net f ′′0 = f ′′n . Cette derniere equation est facilement integree au systeme tandisque pour la premiere, on a en vertu des equations 5 et 10 :
f [x0, x1]− h0f′′0
3− h0f
′′1
6= f [xn−1, xn] +
hn−1
6(f ′′n−1 + 2f ′′n)
On doit donc imposer les deux conditions suivantes pour avoir la periodicite :
f ′′0 − f ′′n = 0
h0
3f ′′0 +
h0
6f ′′1 +
hn−1
6f ′′n−1 +
hn−1
3f ′′n = f [x0, x1]− f [xn−1, xn]
(13)
Remarque 0.1D’autres choix sont possibles. Tout depend de l’information disponible pour un pro-bleme donne. On remarque de plus que pour les deux derniers type de conditionsaux extremites, les systemes lineaires obtenus ne sont plus tridiagonaux. ¨
Remarque 0.2

0.1. SPLINES CUBIQUES 7
Pour effectuer une interpolation a l’aide des splines cubiques, il faut en premierlieu calculer les derivees secondes f ′′i en resolvant le systeme 6 complete par lesconditions aux extremites 8, 9, 11, 12 ou encore 13. Par la suite, on doit determinerl’intervalle dans lequel se situe le point d’interpolation x et calculer le polynomedans cet intervalle en utilisant la formule 1 dans laquelle on remplace :
fi = f(xi)
f ′i = f [xi, xi+1]− hif′′i
3− hif
′′i+1
6f ′′′i =
f ′′i+1 − f ′′ihi
(14)
¨
Remarque 0.3Bien que l’expression 1 de la spline cubique ne fasse intervenir les troisiemes derivees,nous n’avons a aucun moment impose la continuite de la derivee troisieme (sauf pourla condition « not-a-knot » ). Par consequent, la courbe resultante n’est que deuxfois differentiable. ¨
Exemple 0.1Soit les 4 points suivants : (1 , 1), (2 , 4), (4 , 9), (5 , 11). On trouve toutel’information necessaire au calcul de la spline cubique dans la table suivante.
Donnees pour le calcul de la splinei xi f(xi) f [xi, xi+1] f [xi, xi+1, xi+2] hi0 1 1 1
31 2 4 −1
6 252
2 4 9 −16 1
23 5 11
La premiere equation (i = 1) du systeme 6 devient :(
13
)f ′′0 + 2f ′′1 +
(23
)f ′′2 = 6
(−1
6
)
et la deuxieme equation (i = 2) s’ecrit :(
23
)f ′′1 + 2f ′′2 +
(13
)f ′′3 = 6
(−1
6
)
Pour obtenir la spline naturelle (f ′′0 = f ′′3 = 0), on resout le systeme :
1 0 0 013 2 2
3 00 2
3 2 13
0 0 0 1
f ′′0f ′′1f ′′2f ′′3
=
0−1−1
0

8
dont la solution est f ′′0 = 0, f ′′1 = −3/8, f ′′2 = −3/8 et f ′′3 = 0.Pour obtenir l’equation de la spline dans le premier intervalle, on doit utiliser les
relations 1 et 14. On obtient :
f0 = 1
f ′0 = f [x0, x1]− h0f′′0
3− h0f
′′1
6= 3− (1)(0)
3− (1)(−3/8)
6=
4916
f ′′′0 =f ′′1 − f ′′0h0
= −38
et on a :p0(x) = 1 +
4916
(x− 1) +02
(x− 1)2 − 348
(x− 1)3
Ce polynome n’est defini que dans l’intervalle [1 , 2]. On peut par exemple l’evalueren x = 1,5 pour obtenir 2,523 4375.De meme, si l’on a besoin de la valeur de la spline en x = 3, qui est situe dans ledeuxieme intervalle (soit [2 , 4]), on peut obtenir l’equation de la spline dans cetintervalle en posant i = 1 dans l’equation 1. On a alors :
f1 = 4
f ′1 = f [x1, x2]− h1f′′1
3− h1f
′′2
6=
52− (2)(−3/8)
3− (2)(−3/8)
6=
238
f ′′′1 =f ′′2 − f ′′1h1
= 0
et on a :p1(x) = 4 +
238
(x− 2)− 316
(x− 2)2
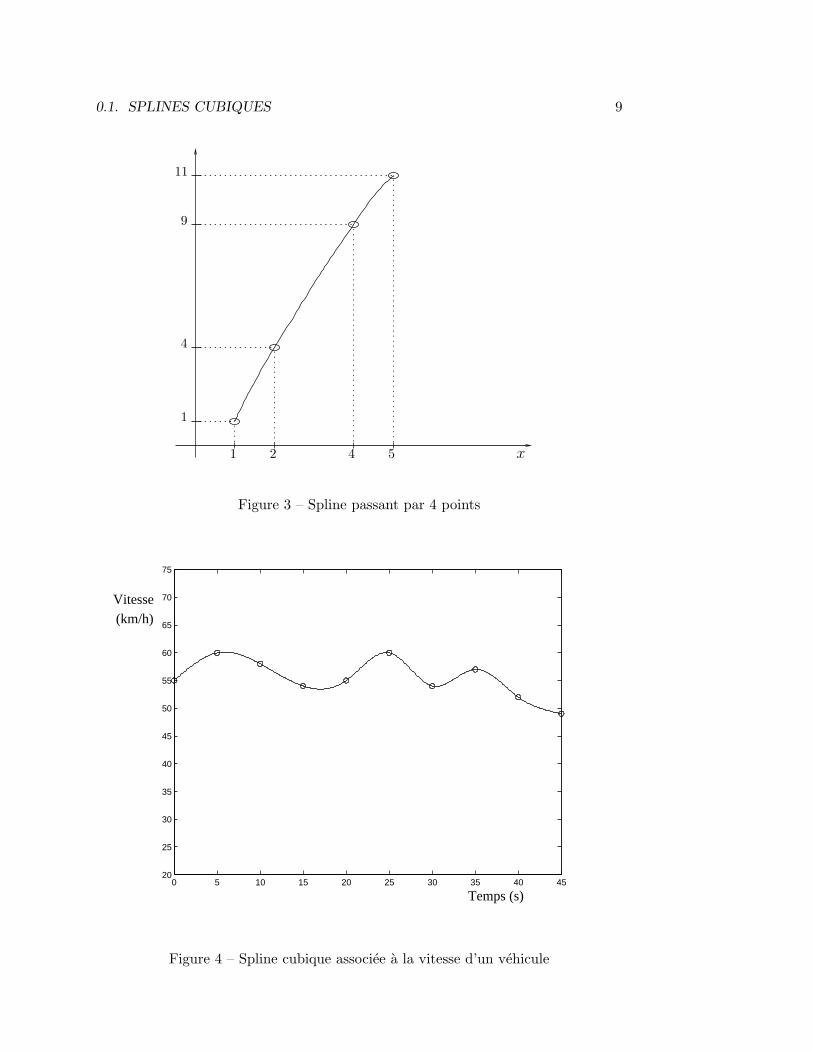
La valeur de la spline en x = 3 est donc 6,6875. La spline complete est illustree a lafigure 3. J
Exemple 0.2Si l’on reprend l’exemple ou la vitesse d’un vehicule est mesuree toutes les 5 secondes,on obtient la spline de la figure ??. On remarque immediatement que les fortesoscillations observees a la figure ?? avec un polynome de degre 9 ont maintenantdisparu. On peut alors interpoler la valeur de la vitesse du vehicule partout dansl’intervalle [0 , 45] sans risque d’obtenir des valeurs aberrantes. J
0.1.2 Splines parametrees
Les logiciels de conception assistee par ordinateur (CAO) doivent frequemmentrelier des points que l’utilisateur specifie a l’ecran en cliquant a l’aide de la souris. Lacourbe resultante n’est pas forcement de la forme y = f(x) en ce sens qu’elle peut
0.1. SPLINES CUBIQUES 9
1 2 4 5
1
4
9
x
11
Figure 3 – Spline passant par 4 points
0 5 10 15 20 25 30 35 40 4520
25
30
35
40
45
50
55
60
65
70
75
Vitesse
Temps (s)
(km/h)
Figure 4 – Spline cubique associee a la vitesse d’un vehicule

10
contenir des boucles et prendre des formes tout a fait quelconques. Nous ne pou-vons donc pas utiliser directement la methodologie que nous venons de developper.Comme nous le verrons, il suffit cependant d’une tres legere modification.
On souhaite ainsi, a l’aide de quelques points donnes dans un plan ou dansl’espace a 3 dimensions, construire des trajectoires complexes permettant de fairela conception d’objets de formes tres diverses. Pour y arriver, on peut avoir recoursaux splines cubiques parametrees que nous allons maintenant decrire.
La parametrisation d’une courbe s’obtient par une equation de la forme :
~γ(t) = (γ1(t), γ2(t), γ3(t)), t ∈ [a, b]
On decrit la courbe en faisant varier le parametre t entre a et b. Pour construireune courbe parametree passant par les points (xi1, x
i2, x
i3) pour i = 0, 1, 2, · · · , n, il
faut d’abord construire la suite ti des valeurs du parametre t de telle sorte que :
~γ(ti) = (xi1, xi2, x
i3)
Le choix le plus simple est bien sur ti = i, mais il ne tient aucun compte des distancesrespectives entre les points (xi1, x
i2, x
i3). Un choix plus judicieux consiste a prendre
t0 = 0 et :
ti = ti−1 + ||~xi − ~xi−1||2 pour i ≥ 1 (15)
La distance entre les valeurs du parametre t est ainsi variable et depend di-rectement de la distance entre les points d’interpolation, ce qui assure un meilleurequilibre de la courbe resultante.
Pour obtenir la spline parametree passant par n points donnes, il suffit de calculerles 3 splines passant respectivement par les points (ti, xi1), (ti, xi2) et (ti, xi3) (endimension 2, on laisse tomber la troisieme spline). Il suffit donc de suivre les etapessuivantes :
– creer le vecteur t contenant les valeurs des ti suivant l’equation 15. On noteratmax la valeur maximale du vecteur t. Les ti etant croissants, on a tmax = tn ;
– creer un vecteur tt qui varie entre 0 et tmax, mais avec une partition beaucoupplus fine que celle de t. En effet, la spline parametree sera evaluee entre lespoints d’interpolation et c’est ce qui assurera une courbe plus lisse. Typique-ment, le vecteur tt variera egalement entre 0 et tmax et contiendra jusqu’a 10fois plus de points que le vecteur t ;
– calculer les 3 splines differentes passant par les points (ti, xi1), (ti, xi2) et (ti, xi3).On fera en sorte d’evaluer ces splines a tous les points du vecteur tt ;
– tracer la spline parametree passant par les points du vecteur tt.
Pour illustrer ce processus, considerons (en dimension 2) les points (xi1, xi2) sui-
0.1. SPLINES CUBIQUES 11
0 0,5 1 1,5 2 2,5 3 3,5 4−0,8
−0,6
−0,4
−0,2
0
0,2
0,4
0,6
0,8
x1
x2
Figure 5 – Points relies par des segments de droite
vants :Points de la spline
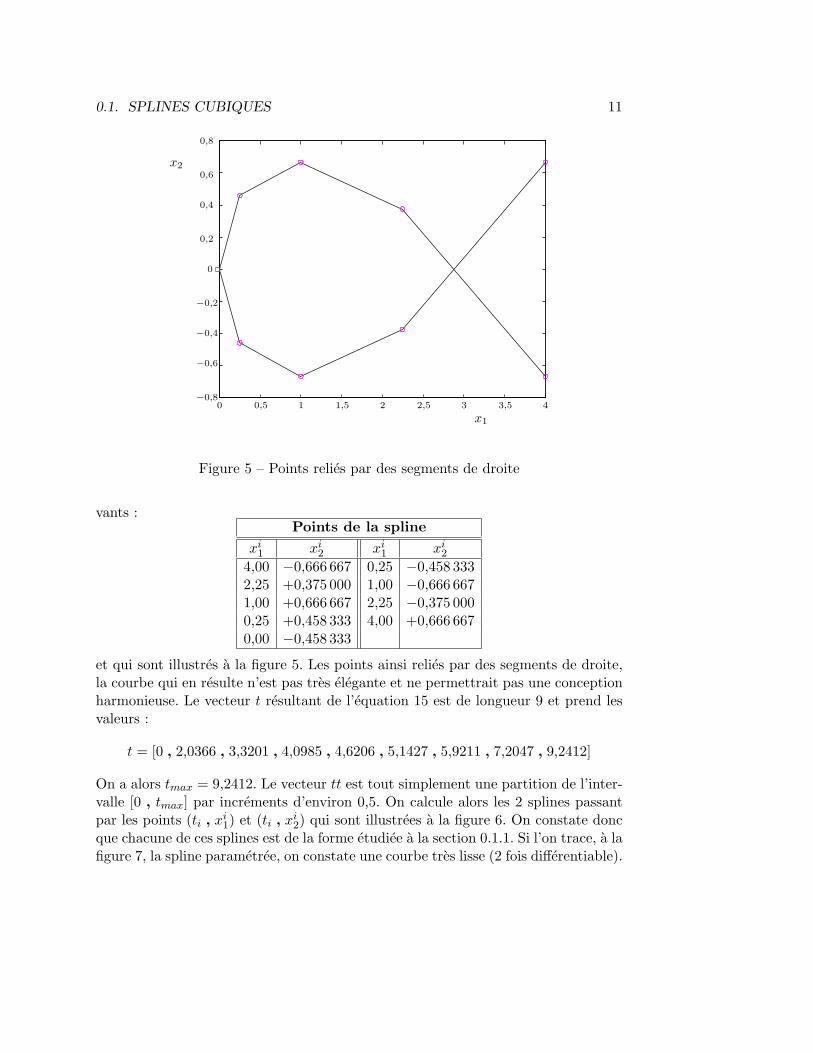
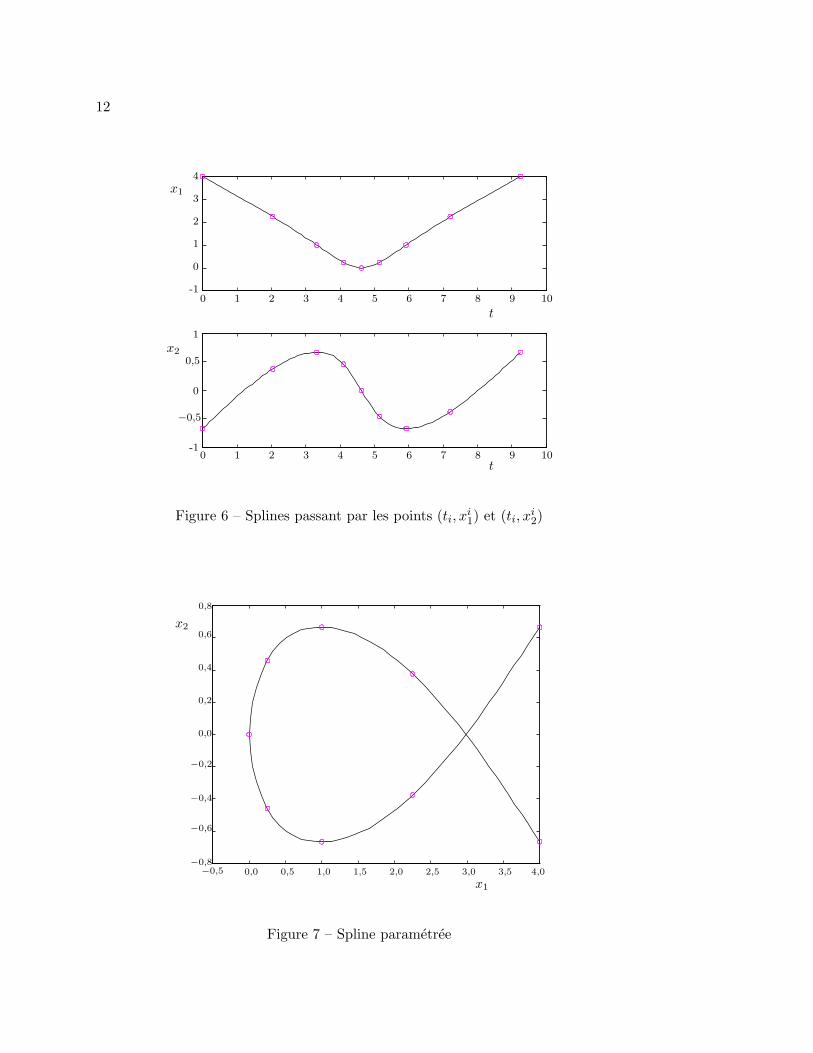
xi1 xi2 xi1 xi24,00 −0,666 667 0,25 −0,458 3332,25 +0,375 000 1,00 −0,666 6671,00 +0,666 667 2,25 −0,375 0000,25 +0,458 333 4,00 +0,666 6670,00 −0,458 333
et qui sont illustres a la figure 5. Les points ainsi relies par des segments de droite,la courbe qui en resulte n’est pas tres elegante et ne permettrait pas une conceptionharmonieuse. Le vecteur t resultant de l’equation 15 est de longueur 9 et prend lesvaleurs :
t = [0 , 2,0366 , 3,3201 , 4,0985 , 4,6206 , 5,1427 , 5,9211 , 7,2047 , 9,2412]
On a alors tmax = 9,2412. Le vecteur tt est tout simplement une partition de l’inter-valle [0 , tmax] par increments d’environ 0,5. On calcule alors les 2 splines passantpar les points (ti , xi1) et (ti , xi2) qui sont illustrees a la figure 6. On constate doncque chacune de ces splines est de la forme etudiee a la section 0.1.1. Si l’on trace, a lafigure 7, la spline parametree, on constate une courbe tres lisse (2 fois differentiable).
12
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
t
x1
0 1 2 3 4 5 6 7 8 9 10-1
−0,5
0
0,5
1
t
x2
Figure 6 – Splines passant par les points (ti, xi1) et (ti, xi2)
−0,5 0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0
0,8
0,6
0,4
0,2
0,0
−0,8
−0,2
−0,4
−0,6
x1
x2
Figure 7 – Spline parametree